基于嵌入式焊接机器人控制系统设计*
2017-02-15郝卫东朱博譞苗国强
张 用,郝卫东,朱博譞,苗国强
(桂林电子科技大学 机电工程学院,广西 桂林 541004)
基于嵌入式焊接机器人控制系统设计*
张 用,郝卫东,朱博譞,苗国强
(桂林电子科技大学 机电工程学院,广西 桂林 541004)
ARM处理器功耗低、成本低、体积小、外围电路简单、拥有丰富外设和I/O引脚等优点能满足不同接口且具有强大的数据信号处理能力。设计了基于嵌入式Linux焊接机器人控制系统,上位机采用Exynos四核Cortex-A9处理器芯片设计上位机硬件电路,以DSP芯片为下位机主控制器,采用QT开发上位机控制系统软件进行QT移植。实验仿真证明:所设计的控制系统能够对机器人进行焊接控制,达到预期效果。
焊接机器人 ;上位机;QT
0 引言
工业机器人[1]在工业生产领域得到广泛应用,除工业焊接机器人本体、驱动部分外,控制系统[2]是焊接机器人最重要的部分。郑天江等人提出采用工控PC和运动控制通讯卡对机器人进行控制[3]。张艳琼等人研究了基于Web service的控制系统[4],利用因特网的开放性实现远程数据交换、多平台接入。随着技术发展,具有控制系统架构可被生产厂家以外任何人进行二次开发的开放控制系统成为研究热点[5-7],此开放式控制系统一般采用PC+运动控制卡模式进行控制。
ARM处理器功耗低、成本低、体积小且外围电路简单,同时ARM处理器拥有丰富的外设和I/O引脚、能满足不同接口且具有强大的数据信号处理能力[8],故ARM处理器作为机器人控制器提供了可行性;嵌入式Linux内核源码开源特性,使得可以根据工程需要在搭建好的Ubuntu编译系统里任意裁剪内核,编译制作镜像再将程序下载到硬件电路里,硬件电路通电调试运行即可实现预期设计。传统工业焊接机器人控制采用示教器在线编程方法,操作人员在现场较固定位置对机器人操作控制焊接,相比传统机器人控制结合国内外最新技术,本文设计焊接机器人控制系统,以DSP芯片为下位机主控器,上位机采用Exynos四核Cortex-A9处理器芯片,设计上位机控制电路,运用QT良好的跨平台移植性,采用QT开发上位机,将编译好的QT镜像下载到上位机硬件电路。
1 总体设计
机器人由机构本体和控制系统组成。工业焊接机器人控制系统的主要要素有:计算机硬件系统及控制软件;输入/输出设备;驱动器;传感系统。机器人电气控制系统主要由上位计算机、DSP运动控制器、驱动器、执行机构和反馈机构。基于此,本文设计的控制系统模块如图1所示。
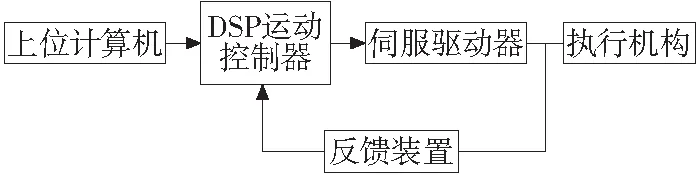
图1 控制系统模块
上位计算机提供人机交互界面,提供人性化设计便于生产操作人员对其操作控制,人机接口包括示教盒、操作面板、显示屏等,上位计算机与DSP运动控制器采用RS232串口通讯;DSP控制器采用双核心TMS320F28335芯片控制,二者采用SPI通讯,将焊接轨迹和控制程序下载到一个DSP控制芯片,另一个芯片处理数据,处理控制程序、上位机、伺服驱动器等反馈数据;伺服驱动器接受DSP控制器发来PWM波驱动6个伺服电机进而实现焊接,其与DSP控制器采用CAN通讯;执行机构包括齿轮、焊枪等,执行焊接任务。
2 上位计算机硬件设计
上位计算机硬件电路处理器芯片采用ARM Cortex-A9 Exynos四核处理器处理数据,SDRAM用于存放程序运行空间、数据及堆栈区;NAND FLASH用于上位机Linux 编译环境编译好的QT镜像、根文件及其他程序等;电源模块为上位机硬件及软件运行提供电量;复位模块提供硬件运行后初始化功能;HPI接口是一个与主机通信的并行接口,用于上位机与DSP运动控制器进行通信,信息通过片存储器与主机进行数据交换;以太网模块用于接入因特网,从而组成局域网;串口模块外部接入JTAG调试接口,用于笔记本电脑将编译好的镜像程序下载到上位机芯片里,并进行程序调试使用;键盘模块控制焊接机器人状态的输入,分别将其实现运行模式按键,实现手段模式和自动运行模式切换,关节运行动作按键等;触摸屏模块和LCD显示提供了硬件平台,将Linux环境下编译好的QT人机交互程序,下载到上位机硬件电路里,在上位机运行即可实现可视化界面,便于操作人员操作机器人焊接控制,同时运行现场报警等实时信息反馈到LCD触摸屏上。所设计的焊接机器人控制系统硬件结构图如图2所示。
DSP控制器通过HPI接口与上位机ARM硬件处理器相连,DSP控制器接收LCD显示屏和其他矩阵键盘输入信号,DSP控制器将PWM信号发送给伺服驱动器来控制伺服电机,带有增量编码器功能的定时器计算驱动器返回的脉冲,可计算伺服电机每个时刻的位置、速度、加速度等信息。DSP控制器自身的AD外设将传感器数字信号转换为DSP控制器可识别的数字量;DSP控制器通过串口与示教器进行通讯。

图2 焊接机器人控制系统硬件结构图
3 控制系统软件设计与实现
本设计采用QT软件开发上位机人机交互界面GUI,其有广泛的适应性及良好的可移植性[9]。在虚拟机VMware-workstation8.0.3上加载从官网下载的Ubuntu12.04.2镜像源码,搭建好嵌入式Linux编译环境[10],交叉编译器为arm-none-linux-gnueabi-gcc -o。打开SSH软件输入虚拟机IP地址、root和密码连接Ubuntu12.02虚拟机上,Linux Kernel3.0内核通过SSH软件拷贝到Ubuntu12.02虚拟机里并用编译器编译可以执行文件;Linux系统层包括应用层、操作层和驱动层。具体架构如图3所示。

图3 Linux系统层关系
3.1 嵌入式操作系统移植
在完成嵌入式Linux交叉编译环境的建立,配置与编译Linux内核,制作根文件系统,设计Bootloader,以及软件平台的搭建后,便要设计上位机控制器的应用软件。应用软件设计中设备驱动程序的开发包括:人机交互界面、触摸屏响应模块、键盘输入响应模块、上位机与PC以太网通信模块以及上位机和下位机DSP控制器通信模块。开发驱动程序时,首先要在已经搭建好的Linux编译系统内核驱动注册到平台设备结构体"platform_driver_register",注册时需和设备相匹配;一部分驱动要和上层通讯,需生成设备节点,上层应用通过一套标准接口函数调用设备节点即可控制底层和底层通讯。
3.2 上位机人机交互界面设计
QT作为跨平台图形用户界面工具包诞生以来,由于其广泛适应性及良好可移植性,已扩展到了包括便携式设备在内的几乎当今程序设计的所有领域。从QT官网下载编译环境所需要的工具包及补丁包,通过SSH软件拷贝到Linux镜像里将其安装成功,搭建好QT编译环境,进行控制界面软件开发,然后将开发好的上位机镜像文件移植到上位机硬件电路里,控制系统软件框图如图4所示。

图4 控制系统软件框图
(1)下位机与机器人本体通信:DSP控制器通过CAN给伺服驱动器发送PWM波,控制伺服电机运转,编码器将电机实时旋转位置、速度、加速度等信息反馈给DSP控制器。
(2)系统日志:可以查看焊接机器人焊接时的工作日志等信息。
(3)密码修改:用于修改设备的登录密码,先输入原始密码,再输入新密码即可实现密码修改。
(4)示教:运用示教器控制机器人实现对其参数设置、机器人运动状态的实时显示等。
(5)上位机与下位机通讯:在上位机设置串口号、波特率等信息,点击打开串口按钮即可实现上位机与下位机通讯。
(6)系统设置:主要包括系统设置操作权限、本体参数设置等,用户在执行任务时要登录密码、设置机器人运动参数等。所设计的QT上位机界面如图5所示。

图5 焊接机器人上位机QT控制页面
切换到手动模式状态下,即可对焊接机器人每个关节手动操作,如图7所示。

图6 手动操作机器人动作
3.3 下位机应用软件控制流程图
设备通电后控制软件系统开始运行,硬件平台开始初始化,机器人检测系统开始检验机器人关节是否在原点处,若不在原点处,则调节机器人回原点处,否则不可自动运行。若在原点处,则进行工作方式选择,若选择手动,则执行相应手动操作。若选择自动工作模式,机器人焊接轨迹是否示教?若需要,则选择示教机器人;若不需要示教,则读取DSP控制器内存、执行相关程序文件,执行伺服电机启动焊接,焊接过程若有报警则在上位机界面显示报警信息,操作人员按照提示解除报警,机器人继续焊接,若没有报警,一个周期焊接结束,焊接机器人回到原点,等待命令执行下一周期焊接。下位机软件系统控制流程图如图7所示。
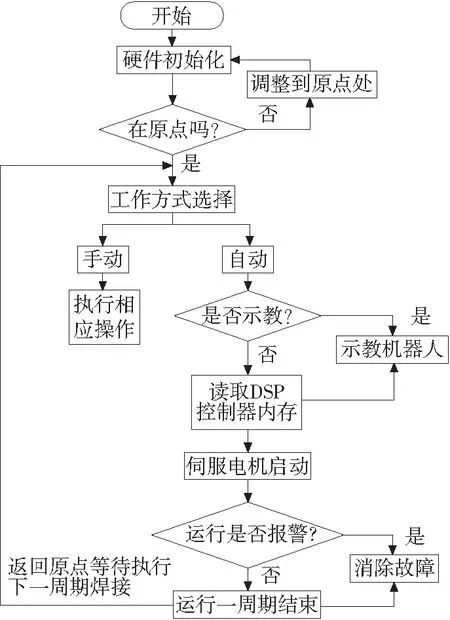
图7 软件控制系统控制流程图
4 实验仿真
本文所设计的焊接机器人控制系统,控制机器人焊接的程序主要在下位机DSP控制器里,上位机提供人机交互界面便于操作焊接使用,焊接产生的实时信息反馈到上位机界面处;下位机DSP控制器控制机器人程序编写需要与上位机吻合、逻辑保持一致。焊接机器人本体及与其相控制的伺服驱动器等电气控制元件价格较高,结合已有的实验条件,以串口调试助手来模拟下位机DSP控制器及其焊接机器人本体。在上位机QT界面,点击自动按钮,串口调试助手收到robstart(),调用下位机DSP控制器执行机器人焊接函数void robstart();控制机器人焊接,图8所示为仿真模拟实验。

图8 仿真模拟实验
5 结论
本文设计的嵌入式焊接机器人控制系统,以DSP芯片为主控制器,上位机采用Exynos四核Cortex-A9处理器芯片,设计上位机硬件电路,上位机采用Linux系统移植。实验仿真表明:所设计的上位机嵌入式控制系统正确、可行。
[1] 蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[2] 徐达,郝琢,李华,等.弹药自动装填机器人控制系统开发平台设计[J].计算机测量与控制,2011,19(4):857-859.
[3] 郑天江,宋孙浩,杨亚威,等.基于实时Linux的网络化开放式运动控制器研究[J].制造业自动化,2015,37(5):36-39.
[4] 张艳琼,蔡瑞英.基于Web Service的工业控制系统研究[J].微计算机信息,2008,24(8-3):58-60.
[5] William E Ford.What is an Open Architecture Robot Controller? [J].Intelligent Control,1994:27-32.
[6] IFR.Executive Summary of World Robotics 2012 Industrial robot [R].World Robotics 2012,Statistical Department in International Federation of Robotics ,2012.
[7] 徐小明,魏泽峰,胡立明,等.基于PC与运动控制器的开放式数控系统研究与开发[J].制造业自动化,2012,34(2):107-110.
[8] 王帅华,杨东升,王允森,等.基于ARM的linux实时抢占补丁的研究与实现[J].组合机床与自动化加工技术,2015(9):1-4.
[9] 杨杏,陈富林,周霏,等.基于Qt的工业机器人语言系统的设计[J].组合机床与自动化加工技术,2015(3):71-74.
[10] 王茂森,许仁江,戴劲松,等.嵌入式山地机器人控制系统设计[J].机械设计与制造,2014(12):212-216.
(编辑 李秀敏)
Design of Control in Welding Robot Based on Embedded
ZHANG Yong,HAO Wei-dong, ZHU Bo-xuan,MIAO Guo-qiang
(College of Mechanical and Electrical Engineering, Guilin University of Electronic Technology, Guilin Guangxi 541004,China)
ARM processor, with advantages of low power consumption, low cost, small size, simple peripheral circuit, rich peripherals and IO pins, etc. has powerful data signal processing ability, which can meet different interfaces. Welding robot control system is based on Embedded Linux to design. Superior machine hardware circuit is designed by Exynos four core cortex-A9 processor chip, and DSP chip is used as main lower computer controller. In order to transplant QT , upper monitor control software system is developed by QT. The simulation experimental results show that the design of the control system can realize the function of welding control for robot, achieving the desired effect.
welding robot; upper computer; QT
1001-2265(2017)01-0089-02
10.13462/j.cnki.mmtamt.2017.01.024
2016-03-26;
2016-04-26
国家自然科学基金项目(51305087);桂工信投资[2014]276号
张用(1986—),男,山东枣庄人,桂林电子科技大学硕士研究生,研究方向为嵌入式技术、工业机器人,(E-mail)jd0604@126.com。
TH165;TG659
A