液压平地机的模糊换挡控制
2017-02-08周瑞浩邹传伍魏华田雯
周瑞浩 邹传伍 魏华 田雯


摘 要:通过对影响液压平地机换挡因素的分析,提出了模糊换挡控制方法,利用MATLAB的Fuzzy Control工具箱完成换挡的模糊控制算法设计,建立相应的模糊控制响应表,在软件CoDeSys开发平台编写程序进行仿真。
关键词:液压平地机;模糊控制;Fuzzy Control工具箱;CoDeSys
DOI:10.16640/j.cnki.37-1222/t.2017.02.038
1 绪论
平地机是一种以铲刀作为工具的施工机械,主要是在大面积平整地上进行工作,比如道路、机场、农田水利等地方,也主要作用于其他方面的施工,包括刮婆、挖沟、推土、松土、清除路面冰雪等[1]。平地机有100多年的发展历史,经过机电一体化,走向自动化和智能化,这种发展路径,主要体现在平地机的换挡方面。传统控制方法都是在确定的数学模型上建立的,但由于平地机的工作状况复杂、工作范围大,工作中的负载是时变的、复杂的,所以要建立精确的复杂模型是极其困难的。为减少繁重的建模工作量 ,提出了二参数模糊换挡控制策略,根据专家经验模糊控制规则,实现了对平地机的换挡决策控制。
2 模糊控制器的结构
模糊化、知识库、模糊推理、去模糊化是模糊控制器的四个模块。对于常规的模糊控制器一般是采用二个输入,即二维控制器,即输出的误差量(e)和误差的改变量(ec),来作为模糊控制器的输入量其具体的系统如图1所示[2]。
3 液压平地机换挡模糊控制器的设计
本系统使用作业质量、油门开度两个输入来作为输入量,挡位选择作为输出量,是属于多输入单输出的系统(MISO),它相对应的模糊控制器输入输出关系图如图2所示[2]。
3.1 控制变量模糊化及量化因子
模糊换挡系统采用多输入单输出结构,根据作业质量、油门开度的大小,按照一定的模糊控制规则和推理方法,进行挡位决策[3]。
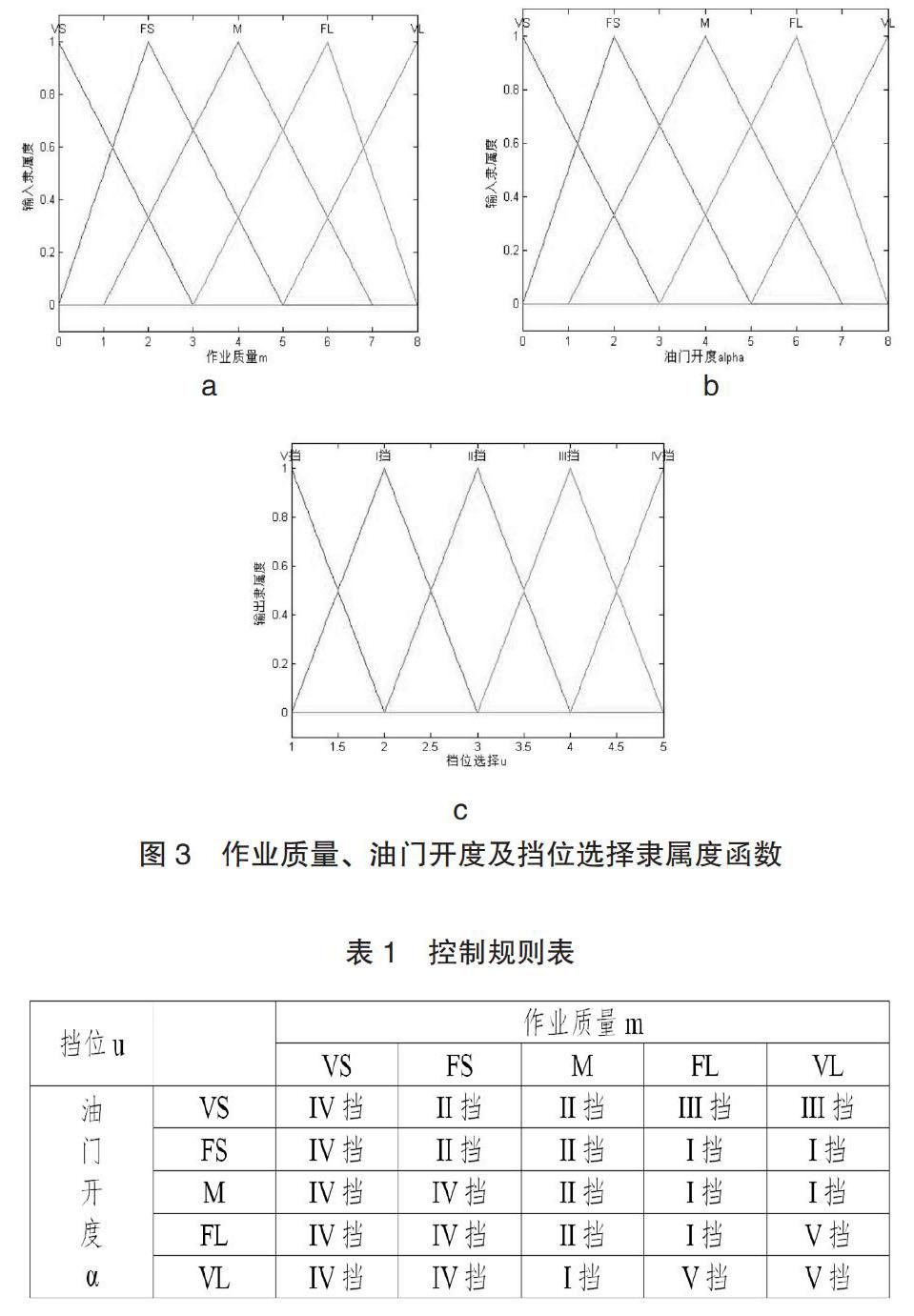
作业质量m的模糊量:“小”(VS)、“中小”(FS)、“中”(M)、“中大”(FL)、“大”(VL)共五个。取其论域为:{0,1,2,3,4,5,6,7,8}。
油门开度α的模糊量:“小”(VS)、“中小”(FS)、“中”(M)、“中大”(FL)、“大”(VL)共五个,取其论域为:{0,1,2,3,4,5,6,7,8}。
以单点来表示档位u ,分别为 “微动挡”(V挡)速度3.5km/h、“低速大负荷作业挡”(I挡)速度7km/h、“中轻负荷作业挡”(II挡)速度11km/h、“除冰雪作业挡”(III挡)速度16km/h、“高速行驶挡”(IV挡)速度24km/h。
3.2 模糊量的隶属函数
作业质量m的各模糊子集的隶属度曲线如图3a所示,油门开度α的模糊子集的隶属度曲线如图3b所示,挡位选择的模糊子集的隶属度函数曲线如图3c[4]。
3.3 模糊推理
采用生成式规则建立系统知识库[2]。 其中具体的知识库规则如下所示:
1. If (m is VS) and (alpha is VS) then (u is IV挡) ;
2. If (m is VS) and (alpha is FS) then (u is II挡) ;
…
24. If (m is VL) and (alpha is FL) then (u is V挡) ;
25. If (m is VL) and (alpha is VL) then (u is V挡) ;
其中关系矩阵 R 的生成式由以上的规则的并组成, 可用下式表述[2]:
((VS*VS)T·IV) ∪((VS*FS)T·IV)∪…∪((VL*FL)T·V) ∪((VL*VL)T·V。其中具体的模糊糊控制表总见表1。
3.4 去模糊化
去模糊化的方法普遍有“最大隶属度法”、“加权平均法”、“面积等分法”等。 由于加权平均法可以在最大程度上包含系统信息而被广泛采用,其公式为[4]:
(1)
式中,系数ki的选择根据实际情况而定。对于不同系统的系数,系统的响应特性不同。
通过MATLAB进行动态仿真,得到如图4所示的模糊换挡策略。
通过进行一系列的总结、修正得到模糊控制查询表,如表 2 所示。将所得的模糊控制查询表存入专用控制器系统扩展程序存储器(ROM)中。
4 CODESYS程序测试对比
创建一个PLC_PRG主函数调用其它功能,程序如下:
声明部分:
PROGRAM PLC_PRG
VAR
END_VAR
VAR_INPUT
M: INT;
A: INT;
END_VAR
VAR_OUTPUT
D: INT;
END_VAR主体部分如下图5:
经多次实验验证该程序能有效的通过作业质量与油门开度得到车辆的档位,例如当作业质量“中小”,油门开度“小”时,系统仿真输出为5档,即微动挡”(V挡)速度3.5km/h。
5 结束语
本文利用模糊控制的魯棒性,平稳性,对平地机的换挡进行模糊设计,在PLC软件平台上实现了控制算法,液压平地机的换挡问题得以改善,使液压平地机可以根据作业状况、油门开度实时的自动选择档位,减少了人为干预,使得换挡更为平缓干扰性得到提高。
参考文献:
[1]焦生杰.国内外平地机发展现状与新技术[D].西安:长安大学,2008.
[2]熊涛,吴向前.基于模糊控制的汽车换挡系统及其设计[D].新疆:新疆大学电气工程学院,2011.
[3]石岗,井元伟,徐皑冬,马佳.基于模糊控制的AMT自动变速系统研究[J].中国科学院沈阳自动化研究所,2008.
[4]许力.智能控制与智能系统[M].北京:机械工业出版社,2007.