工业机器人伺服电机PHM系统开发与研究*
2017-02-02丁小健李小兵黄创绵闫攀峰严拴航黄强
丁小健 李小兵 黄创绵 闫攀峰 严拴航 黄强
工业机器人伺服电机PHM系统开发与研究*
丁小健1,2,3李小兵1,3,4黄创绵1,3,4闫攀峰4严拴航4黄强1
(1.工业和信息化部电子第五研究所 2.广东省电子信息产品可靠性技术重点实验室 3.广东省智能机器人可靠性工程技术研究中心 4.航空工业第一飞机设计研究院)
提出一种工业机器人伺服电机PHM系统,可进行硬件及通道配置、业务算法配置和存储显示配置等。通过NI PXI平台搭建硬件采集模块,基于LabVIEW 2015开发软件系统,实现了对工业机器人伺服电机的故障诊断预测,验证了PHM系统方案的可行性。
工业机器人;伺服电机;PHM系统
0 引言
伺服电机是工业机器人的关键部件之一。要使机器人保持良好的工作性能,伺服电机必须具有较高的可靠性和稳定性,一旦伺服电机出现故障,将会影响工业机器人的性能。因此,对工业机器人伺服电机进行故障预测及健康管理(prognostics and health management,PHM)具有重大意义。
有关电机故障的诊断方法,国内外学者和工程技术人员进行了大量研究。目前,用来诊断电机气隙偏心故障的方法主要有:振动监测法、轴向漏磁通监测法、定子电流频谱分析法和PARK矢量法。Sahraoui M等对定子电流信号进行频谱分析,通过监测边频带的幅值实现对无刷直流电机动态偏心故障的检测和诊断[1];Rajagopalan S等在单一转速的情况下,对一种故障程度进行仿真和实验,但没有具体说明偏心程度与特征频率幅值的关系[2];赵浩铭利用小波分析对定子电流信号进行分析和处理,实现了对电机气隙偏心故障的诊断[3];夏毅采用基于改进的小波包分析法的振动信号分析法以及定子电流法,检测故障类型[4]。
利用电机故障诊断的研究成果,形成了多种电机故障诊断和健康管理系统,如,美国AREVA公司开发的电机故障诊断专家系统、清华大学研发的笼型异歩电机转子断条在线检测仪[5-6]、天津大学研发的嵌入式鼠笼断条智能在线检测系统[7-8]、华北电力大学研发的大型异步电机状态监测和故障检测系统[9-10]、西安建筑科技大学研发的便于携带的电机故障诊断设备[11]等。
在开放式、通用型的故障诊断软件系统开发方面,也有很多研究成果。朱爽等提出了基于知识模型库的故障诊断软件结构方案,该软件合理有序地集成了各种故障诊断方法,能够高效地实施故障诊断功能,且对于任何系统都适应,具有通用性[12];张龙等提出了一种基于特征量可重构的开放式系统设计思路,突破传统状态监测与故障诊断系统专用性的限制,使系统适用对象并不局限于某种或某一对象,具有通用性,并针对数控铣床XK5034,运用开放式通用系统搭建主轴状态监测与故障诊断实验系统,构建与主轴不平衡故障敏感的特征量,实现对铣床主轴不平衡故障的监测与诊断[13]。
综合国内外的研究现状,很少有针对工业机器人伺服电机的故障诊断与健康管理系统的开发和研究。本文提出一种工业机器人伺服电机PHM系统结构方案,方便进行硬件及通道配置、业务算法配置、存储显示配置等。同时,基于NI PXI平台搭建硬件采集模块,基于LabVIEW 2015开发软件系统,实现对工业机器人伺服电机的故障诊断预测。
1 伺服电机PHM系统总体结构
伺服电机PHM系统包括数据采集、信号分析和处理、故障诊断预测、健康管理、存储和展示等模块,总体结构简图如图1所示。
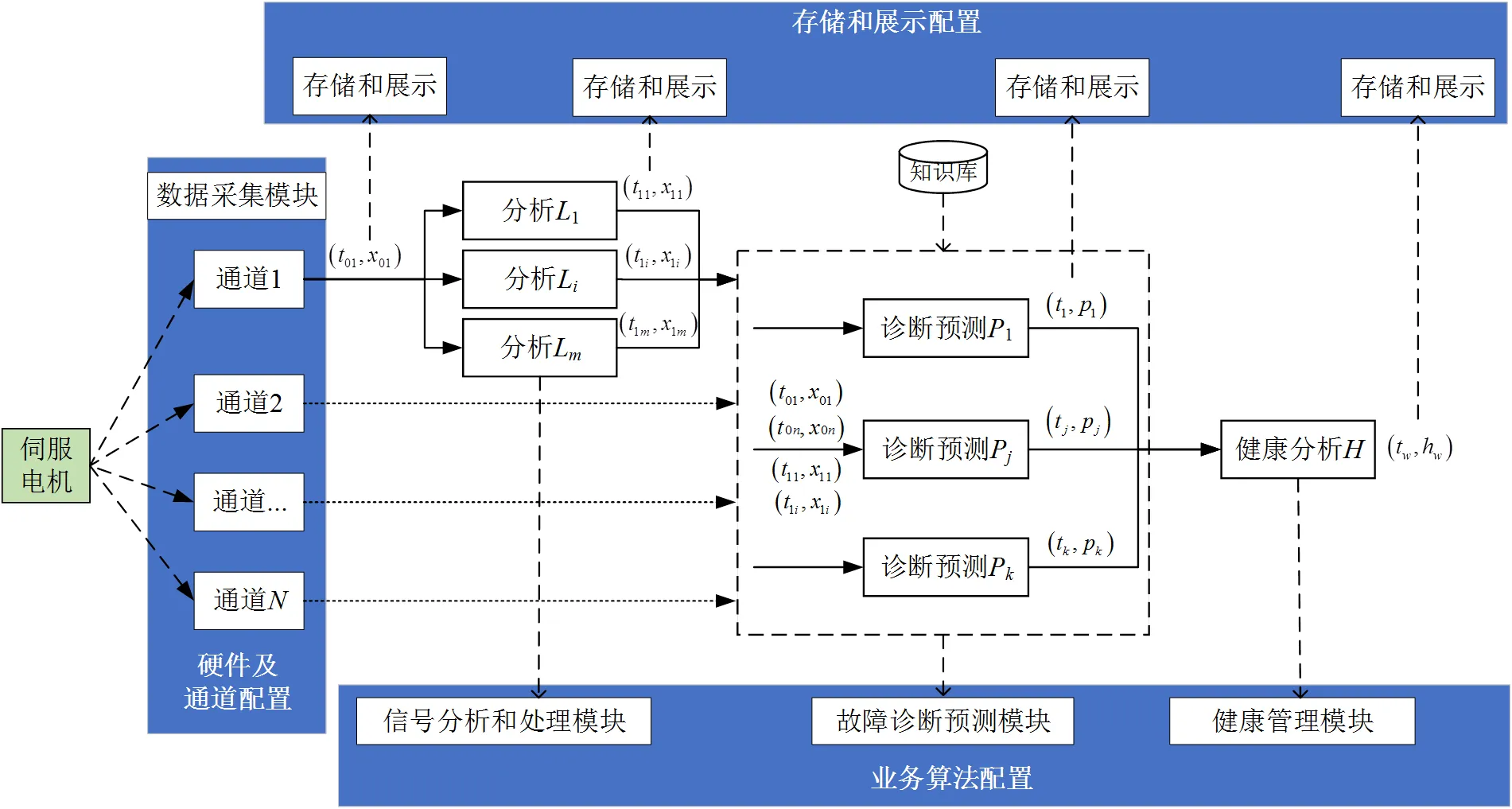
图1 伺服电机PHM系统总体结构简图



5)数据储存和展示模块:为各参量选定数据存储方式,如运行内存、文件存储和数据库存取等,配置方式需根据各模块算法对数据存取效率的要求。根据各业务模块的分析结果,选择展示结果,包括硬件指示灯报警、软件寿命预测分布图和健康等级等。
2 伺服电机PHM系统功能
2.1 系统介绍
根据PHM系统结构,进行硬件配置、软件系统开发、算法配置和存储显示配置,实现工业机器人伺服电机的PHM。系统基于NI PXI平台,搭载通用模数信号数据采集卡、温度采集卡和振动信号采集卡,可以采集伺服电机运行中的多种状态参数,实现多参数监测电机运行,进行故障分析、诊断、监测。软件系统基于LabVIEW 2015开发。NI PXI平台的强大数据处理能力结合LabVIEW平台开发,支持运行多种复杂的分析、诊断算法。
2.2 系统功能
工业机器人伺服电机PHM系统可采集电机运行时的电(电压、电流等)、温度、振动和声音等参数,能显示实时采集的信号波形,同时还能够实时分析采集到的原始信号并显示分析、处理后的波形。系统在运行测试任务时,除了显示实时的波形外还将采集到的数据保存到硬盘上,方便后续的查看和分析。
系统可根据需要选择信号分析诊断预测的算法。系统的分析算法支持MATLAB文件导入,在系统运行测试任务时可以选择所需的分析算法。
目前用于电机诊断的方法主要有电流分析法、振动诊断和声音诊断等。电流分析法通过对负载电流波形的检测和频谱分析,诊断电机故障的原因和程度;振动诊断通过对电机振动信号进行处理和分析,诊断电机产生故障部位,并制定处理办法;声音诊断通过对电机运行时的声音信号进行处理、分析,诊断电机运行时是否有杂音。
以上几种常见的电机故障诊断方法所需采集的信号,在本系统中均具备相应的数据采集卡以及传感器。
3 伺服电机PHM系统实现
3.1 信号采集
1)新建测试任务
新建一个测试任务,任务可以自由命名,操作如图2所示。

图2 新建测试任务
根据测试任务的需要,按照信号类型配置任务采集的通道、类型。图3以配置振动信号采集为例,根据硬件连接勾选需要采集的通道,配置相关的通道信息,如无特殊要求,除了通道外其他参数保持默认即可。同一个电机在不同环境下进行测试时,测试配置是相同的,可通过载入历史任务来完成配置。

图3 采集设置
2)开始测试任务
新建或载入任务后即可开始测试。可点击Acceleration,Electrical PARM,Temperature,Sound按钮,切换查看不同类型信号的实时情况。图4~图7是4种信号的原始波形显示。

图4 振动信号原始波形

图5 电流信号原始波形

图6 温度信号原始波形

图7 噪声信号原始波形
3.2 信号分析
信号分析算法可以是LabVIEW自带的算法,也可以是按照一定函数规则编写的MATLAB文件导入形成的分析算法。系统启动时会扫描该算法目录并载入相关算法,在实时查看和历史数据回放波形图的下拉列表即可查看相应的分析算法。图8~图11是小波分析、傅里叶变换、Butterworth滤波和功率谱分析后形成的波形图。

图8 小波变换后波形

图9 傅里叶变换后波形

图10 Butterworth滤波后波形

图11 功率谱分析后波形
3.3 知识库建立
开始故障诊断预测前需建立故障知识库。运行learn.vi实现知识库的建立。图12是运行知识库生成程序,图13是选择生成知识库的数据。如图14所示,可以选择载入数据的某一段来计算,设置数据通道和故障类型,即可计算特征参数的阈值,计算结果保存到文件,形成诊断预测的知识库。

图12 运行知识库生成程序

图13 数据选择

图14 知识库生成
3.4 故障诊断预测验证
本文选择正常状态的伺服电机和离心开关打开不完全、扫膛、异响3类故障状态的伺服电机作为验证对象。电机故障判定依据以振动信号分析为主,辅以温度、电流和声音等信号,选取电机振动频谱上最大幅值与最大幅值对应频率、电机振动频谱上波峰的数量、电机振动频谱波峰幅值之和、电机温度与温升作为故障特征。
正常状态电机的诊断结果如图15所示,从振动频谱图中可以看出,正常电机的振动幅值较小,波峰数量较少,温升较慢。
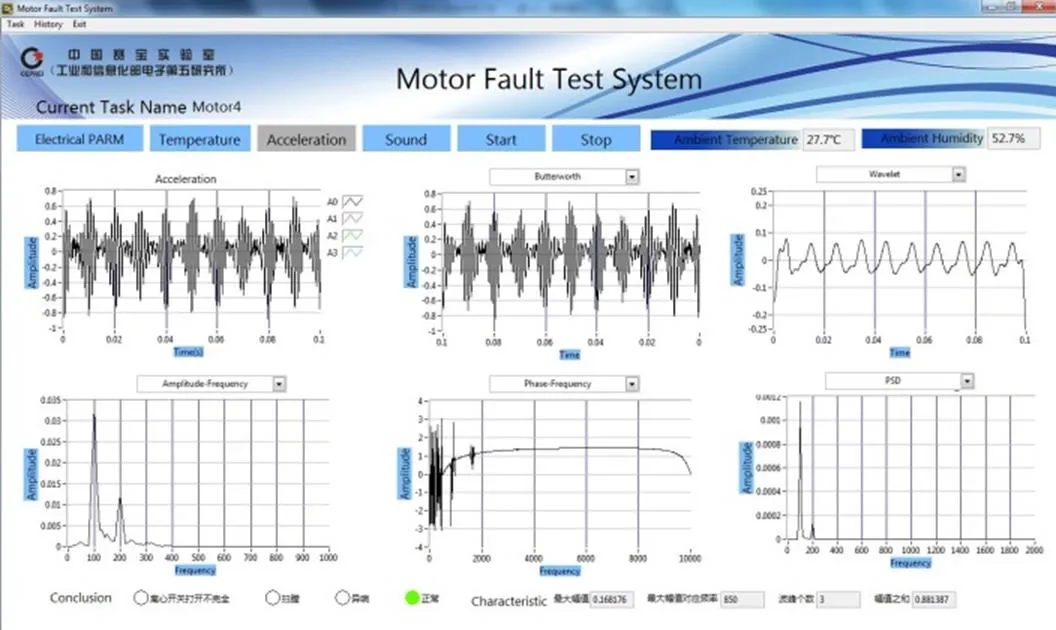
图15 正常电机诊断结果
离心开关打开不完全故障电机的诊断结果如图16所示,从振动频谱可以看出,振动幅值较小,波峰数量较多,温升较快。

图16 离心开关打开不完全故障电机诊断结果
扫膛故障电机诊断结果如图17所示,从振动频谱可以看出,振动幅值较小,波峰数量较多,温升剧烈。

图17 扫膛故障电机诊断结果
异响故障电机的诊断结果如图18所示,从振动频谱可以看出,振动幅值大,波峰数量较多,温升较快。

图18 异响故障电机诊断结果
4 结论
本文对工业机器人伺服电机PHM系统进行开发:
1)提出一种工业机器人伺服电机PHM系统结构方案,系统包括数据采集、信号分析和处理、故障诊断预测、健康管理、存储和展示等模块,可以进行硬件及通道配置、业务算法配置、存储显示配置等;
2)在系统结构方案研究的基础上,针对一类伺服电机,基于NI PXI平台搭建硬件采集模块,基于LabVIEW 2015开发软件系统,实现了对工业机器人伺服电机的故障诊断预测,验证了PHM系统方案的可行性;
3)选择正常状态的伺服电机和离心开关打开不完全、扫膛、异响3类故障状态的伺服电机作为PHM系统验证对象,系统能够诊断出不同状态的电机。
下一步将开展多种诊断及预测算法的研究,以提高PHM系统的故障识别率及诊断精度。
[1] Sahraoui M, Ghoggal A, Zouzou S.E, et al. Dynamic eccentricity in squirrel cage induction motors – Simulation and analytical study of its spectral signatures on stator currents[J]. Simulation Modelling Practice and Theory, 2008,16 (9):1503-1513.
[2] Rajagopalan S , Roux W L , Habetler T G, et al. Dynamic Eccentricity and Demagnetized Rotor Magnet Detection in Trapezoidal Flux (Brushless DC) Motors Operating Under Different Load Conditions[J].IEEE transactions on power electronics, 2007, 22 (5):2061-2069.
[3] 赵浩铭.基于信号分析的工业机器人故障诊断研究[D].沈阳:沈阳建筑大学,2013.
[4] 夏毅.基于小波分析的感应电动机故障诊断[D].广州:华南理工大学,2015.
[5] 邱阿瑞.用起动电流的时变频谱诊断鼠笼异步电机转子故障[J].中国电机工程学报,1995,15(4):267-273.
[6] 邱阿瑞.提取感应电动机转子故障特征的新方法[J].清华大学学报(自然科学版),1997,37(1):35-37.
[7] 李桂丹,王晓远,陈益广,等.异步电动机转子故障在线检测方法[J].微电机(伺服技术),2003,36(3):55-57.
[8] 李桂丹.嵌入式鼠笼断条智能在线检测系统的研究[D].天津:天津大学,2003.
[9] 侯志勇,李和明,许伯强,等.大型异步电动机状态监测与故障诊断系统的研制[J].山西电力,2002(1):58-60.
[10] 候志勇.大型异步电动机状态监测与故障诊断系统研究[D].北京:华北电力大学,2001.
[11] 刘小军. 便携式电机故障诊断仪的研究与开发[D].西安:西安建筑科技大学,2003.
[12] 朱爽,桂卫华,刘晓颖,等.通用故障诊断软件系统的设计开发与研究[J].基础自动化,2001,8(4):36-39.
[13] 张龙.开放式状态监测与故障诊断通用系统的研究[D].绵阳:西南科技大学,2013.
Development and Research of PHM System for Industrial Robot Servomotors
Ding Xiaojian1,2,3Li Xiaobing1,3Huang Chuangmian1,3Yan Panfeng4Yan Shuanhang4Huang Qiang1
(1. China Electronic Product Reliability and Environment Testing Research Institute 2. Guangdong Provincial Key Laboratory of Electronic Information Products Reliability Technology 3. Guangdong Provincial Research Center of Intelligent Robot Reliability 4. Avic the First Aircraft Institute)
PHM for industrial robot servomotors have great significances. The structure of a kind of PHM system for industrial robot servomotors is designed in this paper because of the present lack of this system. The system can provide hardware and channel configuration, algorithm configuration, store and display configuration, etc. Through the hardware acquisition module and the software which are based on NI PXI platform and LabVIEW 2015 system, the fault diagnosis and prediction of servomotors are realized, and the feasibility of PHM system is verified.
Industrial Robot; Servomotor; PHM System
丁小健,男,1989年生,硕士研究生、工程师,主要研究方向:故障预测与健康管理。
李小兵,男,1984年生,博士、高级工程师,主要研究方向:装备可靠性。
黄创绵,男,1982年生,硕士研究生、高级工程师,主要研究方向:可靠性方向。
闫攀峰,男,1981年生,本科、高级工程师,主要研究方向:可靠性工程。
严拴航,男,1979年生,硕士研究生、高级工程师,主要研究方向:可靠性工程。
黄强(通讯作者),男,1989年生,本科、助理工程师,主要研究方向:可靠性方向。E-mail: 13928797415@163.com
国家科技重大专项(2016ZX04004006);广东省应用型专项资金(2017B090914003);广东省省级科技计划项目(2016A040403036);工业转型升级(中国制造2025)重点项目(0747-1660SITCA120/2);工信部智能制造专项“智能装备故障诊断和预测性维护共性技术标准研究及试验验证”;广州市机器人及智能装备项目“工业机器人用伺服系统一体化检测技术研究及系统开发”。
