带温度补偿的双余度舵机伺服控制算法研究
2017-01-13崔海华
崔海华
(北京青云航空仪表有限公司,北京 100086)
带温度补偿的双余度舵机伺服控制算法研究
崔海华
(北京青云航空仪表有限公司,北京 100086)
针对双余度舵机不同控制通道间速度环输出指令存在偏差、电流冲击和输出转矩波动等问题,提出了一种带温度补偿的双余度舵机伺服控制算法。首先,采用积分均衡的方法抑制传感器和双通道控制器解算误差引起的速度环输出指令的差异,然后采用电流截止负反馈的方法减小负载扰动和电机过渡过程带来的电流冲击,最后通过对电机进行温度补偿来减小环境温度和本体升温对输出转矩的影响;仿真结果表明,该算法能够有效抑制速度环输出指令误差和减小电流冲击,使电机在不同的工作温度下保持良好的性能。
双余度舵机;伺服控制;积分均衡;电流截止负反馈;温度补偿
0 引言
在航空领域,采用多电或全电技术设计飞机的理念已引起了研发人员的广泛兴趣[1 2]。采用多电技术可以有效提高整机的可靠性、维修性、测试性及地面保障能力,而多电技术的其中一个关键技术就是机电作动器(以下简称“EMA”)。EMA主要由控制器、驱动器、执行机构(简称“ETU”)等组成,而作为提供动力的电机一旦出现故障,将导致EMA丧失功能,进而影响飞行安全。通过可靠性分析得知,驱动器及其电机是制约系统可靠性指标的薄弱环节,通常采用备份或余度技术来提高其可靠性。
采用双通道控制的EMA,由于速度环的运算周期的原因,使其无法在周期任务内完成信号的表决,从而造成了不同控制通道间的输出指令之间存在偏差,该偏差会导致通道切换瞬态,严重情况下会损坏产品的结构件。此外,当电机工作在频繁地起动、制动和正反转状态,如果没有专门的限流措施,电机运行在上述状态时电枢绕组中会产生很大的冲击电流[3]。在上述工作状态下,电机本体的温升很快,而且环境温度很高,不利于散热,这将导致电机电枢绕组的温度的升高,效率降低,输出转矩下降等问题。本文通过积分均衡、电流截止负反馈和温度补偿等策略解决了上述问题,并给出了仿真验证结果。
1 EMA系统结构
本文研究的EMA系统主要由监控逻辑模块,伺服算法模块,驱动和电机模块,减速和综合环节组成。该系统接收外部的目标位置指令,通过伺服控制算法实现对指令的跟踪。其系统结构的原理如图1所示。

图1 双通道EMA系统结构原理图
监控逻辑模块主要实现通道故障监控和管理的功能。EMA根据A通道和B通道的工作状态协调双通道间的工作。
正常情况下,EMA的A电机和B电机同时工作;当A电机故障时,切除其控制号,自动切换到B电机工作;当B电机故障时,切除其控制号,自动切换到A电机工作;当A电机和B电机均故障时,设置故障安全值,使系统稳定在一个安全状态。
此外,单个电机能够独立地输出整个EMA所需输出的转速和转矩。因此,单个电机故障不影响EMA的输出速度和力矩。
1.2 伺服算法模块
伺服算法模块主要用于实现位置环和速度环控制算法的解算和驱动指令的生成等功能。该模块根据接收到的目标位置指令,根据EMA输出轴位置、电机输出轴转速和电枢绕组电流等反馈量,解算生成电机的驱动指令,驱动电机运动,进而带动EMA输出轴运动至目标位置。
1.3 驱动和电机模块
驱动模块的作用是将伺服算法模块的输出指令转换成驱动直流无刷电机换向所需的脉宽调制信号(即PWM信号),并经过隔离和功率放大环节后驱动电机运动。
直流无刷电机是实现系统机电能量转换的媒介,通过PWM指令和耦合磁场将电能转换成机械能(电机输出轴的转速和转矩),并带动后端的传动机构运动,并最终带动EMA输出轴运动。
瞳孔边缘检测的结果会直接影响到瞳孔中心坐标的计算,进而影响到视线估计的精度。众边缘检测算法中,Canny算子具有明显的优势。Canny算子对一阶微分算子进行改进,增加了非最大值抑制来抑制多边缘响应,又增加了和双阈值来减少边缘的漏检[11-13]。本文采用Canny算子进行初步的瞳孔边缘检测。检测结果如图9所示。
1.4 减速和综合环节
减速和综合环节实现了对双电机机械运动的合成,以及转速、转矩的转换和传递。当A,B两通道中出现某一通道故障时,该机构能够保证锁定故障通道,同时保证良好通道的正常工作。
2 伺服算法设计
2.1 积分均衡
为了兼顾控制功能的实现和直流无刷电机正常的换向,将周期任务划分为长短两个周期,并将速度环控制算法的解算和后续的计算环节放在了短周期任务中。由于短周期内无法完成交叉通道数据传输、表决和监控等功能,因此在短周期任务内每个通道均是独立完成本通道速度环控制算法的解算及电机驱动指令的生成工作。
为了抑制负载转矩的干扰,提高电机硬度和EMA输出轴转速和转矩的静差,本文采用PI控制和非线性校正相结合的方式实现速度环控制算法。
然而,由于控制和驱动芯片制作工艺造成的差异,电机本体特性差异,传感器安装误差和测量噪声,以及积分器的累积效果等原因,使得在短周期任务内双通道速度环解算出的控制指令之间一直存在偏差。双通道速度环输出指令间的差异,将会造成后端每通道电机输出转速和转矩的差异,进而通过减速和综合环节后影响EMA的效率。严重时,甚至影响EMA的功能实现。因此,必须想办法抑制或是消除这种差异。图2给出了一种利用速度环积分器来消除双通道间输出指令偏差的解决方案,即积分均衡算法。

图2 双通道速度环积分均衡的原理框图
2.2 电流截止负反馈
本文的EMA采用转速负反馈的单闭环调速控制策略,图3给出了算法的原理。
在电机起动时,电枢绕组突然加上额定供电电压,由于机械惯性,电机不会立即旋转起来,转速为零,反电动势也为零,此时加在驱动器输入端的偏差电压差不多是稳态工作值的(1+ K)倍(K为调速系统的开环放大系数)。这时由于电路中电流的惯性很小,使输出电压迅速达到输入端的偏差电压,对于电机来说相当于全压起动,于是会有很大的冲击电流产生。

图3 EMA转速负反馈的调速算法示意图
另外,EMA在运行中可能会突然被加上一个很大的负载造成电机堵转,由于EMA的静特性很硬,如果没有限流措施,电机电枢绕组的电流会大大超过允许值。
此外,在实际运行过程中,EMA频繁工作在起动、制动和正反转工作状态。因此,如果没有限流措施,电机电流冲击会很大,会引起驱动电路的温升过快,电流定额下降等一系列问题。
为解决EMA在运行过程中的过流问题,设计了电流检测电路,用来检测电机电枢绕组的电流,同时,将该电流作为电流截止负反馈的输入信号,采用电流截止负反馈技术来实现自动限流。改进算法的原理如图4所示。

图4 带电流截止负反馈的调速算法示意图
由图4可知,带电流截止负反馈的调速算法是需满足一定条件的。当电枢电流小于比较电流Icom时,系统的反馈特性同图3所示;当电枢电流大于比较电流Icom时,电流截止负反馈接通,起到限流的作用。
2.3 温度补偿
根据铜材料的电阻温度系数αcu=0.003 9可知,其电阻随温度的升高而线性增大[4-5]:

由公式(1)可知,当电机的实际工作温度为200℃时,电机的电枢绕组将较25℃时的测量值增加68.25%;当电机的实际工作温度为-45℃时,电机的电枢绕组将较25℃时的测量值减小27.3%。因此实际工作温度范围内,电机电枢绕组将在0.73~1.68倍常温绕组内变化。通过直流无刷电机的数学模型可知电枢回路的电磁时间常数,其中:L为电枢电感,R电枢回路电阻。通过上述分析可知,电机的电磁时间常数在0.59~1.38倍的常温电磁时间常数内变化。
此外,温度升高对电机最重要的影响是转速-转矩机械特性。资料[6]显示Nd FeB材料的磁钢从冷却状态(低温环境温度)运行到热态(高温环境温度加升温)运行时温度每提高100,则Nd FeB电机每极气隙磁通量将减少12.6%,这将导致在同一端电压运行时,仅由于磁通变化引起的空载转速将提高12.6%;在同一电枢电流下运行时,仅由于磁通变化引起的电磁转矩将下降12.6%。

图5 伺服算法原理框图
通过上述分析可知,在不同的温度下有必要对控制参数进行补偿,以修正由于电机本体特性及传动机构发生变化而带来的EMA运动特性的改变。
2.4 伺服算法原理框图
本文研究的舵回路伺服控制系统主要由伺服控制算法(指令滤波环节、位置环控制律、位置指令分配算法、速度环控制律),直流无刷电机,传动机构,以及传感器等环节组成。本文采用MATLAB 2009a的Simulink模块搭建了该系统的仿真模型,如图5所示。
经过对系统进行建模分析得知该系统可简化为典型的I型系统,同时为避免引起位置超调(即将位置环设计成过阻尼系统),位置环算法采用比例和非线性校正相结合的方式;为了提高无刷直流电机响应的动态和静态特性,速度环算法采用了PI调节和非线性校正相结合的方式。此外,为了抑制输入信号的高频干扰,选用了滤波环节对位置指令信号进行了滤波处理。
3 仿真验证
本文选取某型耐高温直流无刷电机为研究对象,选取25℃、100℃、150℃、200℃共4个不同温度下的电机的参数进行算法设计和仿真验证。其中,4个温度下的电机的相间电阻分别为1.01Ω、1.31Ω、1.51Ω、1.71Ω;4个温度下电机转矩常数分别为70.5 m N·m/A、68.7 m N·m/A、67.4 m N ·m/A、66.2 m N·m/A;4个温度下相间电感均为0.298 m H,电机额定电压为48 V,转子转动惯量均为128 g·cm2,A电机输出轴带动的负载折算到电机轴的转动惯量为38 kg· mm2,B电机输出轴带动的负载折算到电机轴的转动惯量为31 kg·mm2,舵机输出轴需能带动5 Nm的恒拖动性负载力矩。
在上述参数的基础上,开展算法设计得出系统在不同温度下的频域特性如表1所示。

表1 不同温度下的频域特性
在0.1 s时加入幅值为100°的位置指令,仿真结果如图6~图11所示。其中,图6、图8和图10是采用100℃下位置环和速度环的控制参数,且不带电流截止负反馈EMA各个状态参数的响应特性曲线,图7、图9和图11是采用温度补偿,且增加电流截止负反馈EMA各个状态参数的响应特性曲线。

图6 采用100°参数的ETU位置响应对比图

图7 采用温度补偿后ETU位置响应对比图

图8 采用100°参数的电机输出轴转速对比图
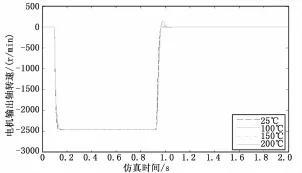
图9 采用温度补偿后转速对比图
4 结论
本文提出了一种带温度补偿的双余度舵机伺服控制算法,该算法用于解决双余度舵机不同控制通道间速度环输出指令存在偏差、电流冲击和输出转矩波动等问题[7-8]。仿真结果表明,该算法能够有效抑制速度环输出指令误差和减小电流冲击,使电机在不同的工作温度下均保持良好的运行特性。

图11 采用温度补偿后电流对比图
[1]郝振洋,胡育文,黄文新.电力作动器中永磁容错电机及控制系统的发展[J].航空学报,2008,29(1):149-158.
[2]倪风雷,朱映远,等.双绕组无刷直流电机容错控制系统的实现[J].电机与控制学报,2010,14(11):69-75.
[3]马瑞卿,刘卫国,韩英桃.电流截止负反馈无刷直流电机可逆调速系统[J].微电机,2005,38(1):41-44.
[4]杨 耕,罗应立,等.电机与运动控制系统[M].北京:清华大学出版社,2007.
[5]高精密驱动系统[EB/OL].maxon motor.2014.
[6]唐任远.现代永磁电机:理论与设计[M].北京:机械工业出版社,2005.
[7]马瑞卿,刘卫国,谢 恩.双余度无刷电机位置伺服系统仿真与试验[J].北京:中国电机工程学报,2008(06).
[8]马瑞卿,刘卫国.无刷直流电机电流控制方法研究[J].微电机,2009,42(4):42-45.
Research on Algorithm of Dual Redundant Actuator with Temperature Compensation
Cui Haihua
(Beijing Qingyun Aviation Instruction Co.Ltd,Beijing 100086,China)
Aimed to the problems of speed loop instruction error,current shock and torque ripple during the dual-redundancy actuator process,a servo-control method is discussed in this paper.Firstly,the integral equilibrium is adopted to restrain the speed loop instruction error of sensors and two-channel controller calculating.Then the current shock generated by load disturbance and motor transition process is alleviated with current cut-off feedback.Finally,the temperature compensation is applied to neutralize the torque ripple caused by environment temperature and motor heat.The simulation result shows that the method can effectively assure the motor performing satisfactorily under different conditions.
dual-redundancy actuator;servo-control;integral equilibrium;current cut-off feedback;temperature compensation
1671-4598(2016)08-0103-04
10.16526/j.cnki.11-4762/tp.2016.08.028
:TJ765
:A
2016-02-29;
:2016-03-26。
崔海华(1983-),男,河北唐山人,硕士研究生,工程师,主要从事飞行控制系统设计和机电控制系统设计方向的研究。
