实时优化与分布式控制集成算法
2017-01-13李丽娟薛霏霏
杨 凯,李丽娟,薛霏霏
(南京工业大学电气工程与控制科学学院,南京 211800)
实时优化与分布式控制集成算法
杨 凯,李丽娟,薛霏霏
(南京工业大学电气工程与控制科学学院,南京 211800)
预测控制作为一种以预测模型为基础的先进控制算法,分布式预测控制广泛应用于复杂高维的复杂大系统控制中;提出了针对大规模过程的实时优化与分布式预测控制集成算法,包含稳态目标计算层和动态分布式控制层;在稳态目标计算层根据当前系统的运行状况进行集中优化,在系统运行的每一时刻计算出相对的全局最优值,并将其传递到下层进行控制;在动态控制层将复杂的大系统分为若干个相对独立的子系统,并且充分考虑各个子系统之间的关联和耦合,用分布式预测控制算法对上层计算得到的相对的全局最优值进行跟踪,提高系统在动态情况下的控制性能;仿真应用表明,此方法的优点在于保证全局最优的同时,降低了计算的复杂度,并且实现了经济目标。
预测控制;双层结构;稳态优化;分布式
0 引言
模型预测控制是一种基于模型预测的启发式控制算法[1]。传统的预测控制对设定值的问题加以考虑,而设定值的选取关系到工业生产过程的稳定与安全性、产品的质量、生产的成本、环境污染等许多问题,实时优化与控制的集成可以有效地弥补传统预测控制未考虑环境、经济等性能指标的不足。
正是由于实时优化与控制集成的显著实际意义,有很多学者对此进行了研究。李少远等首先提出了综合考虑稳态优化与动态控制的双层结构预测控制算法[1]。文献[2]从定性和定量这两个角度对区间预测控制与双层结构预测控制进行了比较,得出双层结构预测控制比传统的预测控制在工业系统控制问题中更有优势。与经典预测控制相比,双层结构预测控制计算复杂度是其需要重点考虑的,通过对计算复杂度的分析可知,双层结构预测控制的要点在于动态控制层的求解[3]。为降低动态控制求解过程复杂度,文献[4-5]将复杂大系统分为若干个子系统,并使用纳什最优方法对每个子系统的最优控制量进行求解[6],即分布式预测控制。而基于全局最优的分布式预测控制[7],充分考虑了各个子系统之间的耦合性和协调性,使基于全局最优的分布式算法收敛于全局最优解[8],但是滚动优化中使用了人为设定值的轨迹,这就导致了预测控制控制的跟踪目标不一定符合稳态最优的条件。稳态优化与分散式预测控制结合[9-10],能够提高复杂大系统的双层结构预测控制的实时性,简化动态优化计算,但是在动态优化层进行分散式控制,虽然加入了前馈,各个子系统之间的耦合和协调性并没有充分考虑。
在之前的研究中,双层结构模型预测控制在稳态层执行的是集中优化的功能,在动态控制层将工业大系统分解组合为多个子系统,但是对它们之间的耦合和协调关系欠缺思考,全局性能不能满足。提出了实时优化与分布式预测控制集成算法,在处理复杂大系统时,将复杂大系统分为若干个互相关联的子系统,并且使用双层结构模型预测控制,在上层的稳态优化层对各个子系统进行集中优化确保系统的全局最优性,进而将计算得到的稳态最优值传递到动态控制层。在下层的动态控制层使用分布式算法,充分考虑各个子系统的之间关联,降低了动态层求解的计算复杂度,提高了控制控制的实时性,系统的全局性能也得以保证,在进行动态跟踪时不仅仅跟踪被控输出,并且在一定程度上对控制输入进行跟踪,满足系统对一些经济、环境指标的优化。
1 模型预测控制概述
在工业生产过程中运用的模型预测控制算法一般使用阶跃响应模型。在每一个控制开始的时刻,通过系统以前的输入输出状态计算从当前时刻开始的M个控制作用的增量,使得未来P个时刻受控输出在控制增量的作用下尽量与上层稳态优化层计算得到的期望值逼近。M称作控制时域,P称作优化时域。模型预测控制算法由预测模型、滚动优化、反馈校正这3个方面构成[9]。
在当前时刻k根据阶跃响应模型预测未来P个时刻的模型预测输出为:

在模型预测控制的滚动优化中,要求每一个输出的预测值尽可能的接近期望值,即上层的稳态优化层计算得出的最优设定值,性能指标的写作:

其中:wp(k)=[w(k+1),…,w(k+P)]T为受控输出的设定值;
Q=block-diag{Q1,…,QP}T,Qi= diag{qi(1),…,qi(p)},(i =1,…,p),R=block-diag{R1,…,Rm}T,Rj=diag{rj(1),…,rj(m)},(j=1,…,m)分别为误差权数矩阵和控制权数矩阵,m为控制变量的个数,p为被控输出的个数。
无约束条件时,由上式求偏导可以求出使得性能指标式最优的控制增量序列,取序列的第一项作为控制作用增量:
可以求得需要实施的m个要实施的即时控制量:
将迭代求得的控制变化量作用于系统,在下一时刻,测量得到系统真实输出与算法求得的预测值的误差,通过对误差进行加权预测未来时刻的误差,通过这种方法通过模型得到的预测值,作为下一时刻的初始预测向量。
根据公式(1),在k时刻将u(k)施加于系统时,未来时刻的输出预测值为式(1),其中^yP0(k)是未加入Δu(k+1),…,Δu(k+M-1)时的输出预测值,经过位移后可以作为k+1时刻的初始预测值进行新的优化计算。但是,实际控制系统有模型失配、环境干扰等问题存在,式(1)计算出的预测值实际值之间存在偏差。首先需要检测系统当前时刻实际输出y(k),将其与式(1)算出的模型预测输出^yPM(k)相比较,构成输出误差:

通过对e(k)加权的方法修正对未来的输出的预测:
为校正后的输出预测向量,h=[h1,…,hN]T,为权系数组成,称为校正向量,N为建模时域。
2 实时优化与分布式预测控制集成算法
双层结构模型预测控制应用在复杂高维大系统,将复杂高维的大系统划分为多个子系统,将各个子系统之间存在的耦合与相关情况,允许各个子系统之间通过网络通信,交换各自的最优控制变量,每一个子系统在获得其他子系统信息的情况下求解出自身的控制序列,提高了整个系统的控制性能[10]。优化控制策略如图1所示。
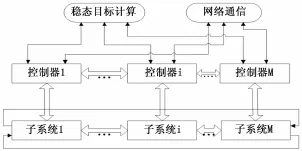
图1 实时优化与分布式预测控制集成框图
对复杂大系统采用实时优化与分布式预测控制策略有两种实现方式:一种是复杂大系统进行集中优化,即建立整个系统的稳态优化模型并且计算稳态目标,然后在动态控制层进行分布式预测控制;另一种则是分别对每个子系统进行实时优化,再与预测控制集成的双层结构方式,即每个子系统建立自身的稳态模型,计算出稳态目标并传送到各自的动态控制层。第二种方法中,对划分得到的各个子系统的稳态目标求解,由于各子系统将整体目标的分解开来,优化变量间的相互关联难以实现,因而难以达到整体性能的最优,因此主要考虑第一种算法。
从图1可以看出,对复杂大系统使用的方法是集中优化,可以保证全局性能。计算最优控制序列时,各个子系统之间的耦合与关联性被加以考虑,让各个子系统通过网络通信实时交换各自的控制量,可以提高整个系统的控制性能。系统的动态层控制已被分散到各个子系统控制中去,每一个子系统在当前时刻,不仅仅收到自己本身的控制量输入影响,还会收到其他控制量输入变化的影响。每个一个子系统对上层稳态优化的设定值进行跟踪,除了跟踪输出的设定值轨迹之外,根据之前提出的以经济环境为指标的输入量也需要进行一定程度的跟踪。实时集中优化与分布式预测控制集成算法包括稳态模型建立,稳态目标计算求解和动态层分布式控制这3个方面。
2.1 稳态数学模型
假设被控对象有m个控制量,p个被控输出,建模时域为N,已经每一个输出yi(0≤j≤p)对于每一个输入的uj(0≤j≤m)的阶跃响应aij(0≤i≤p,0≤j≤m),可组成模型向量:

假设系统在k时刻的输出值为y(k),则由k+1时刻系统的输出值则为:
在m 个连续控制变化量Δu(k),…,Δu(k+M-1)的作用下,预测输出为:
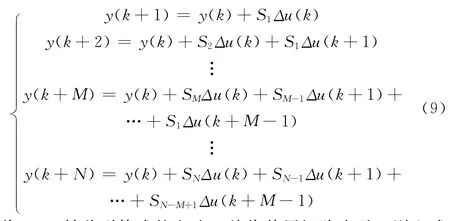
将y(k)转移到等式的左边,并将其用矩阵表示,则上式(3)可以简写为:
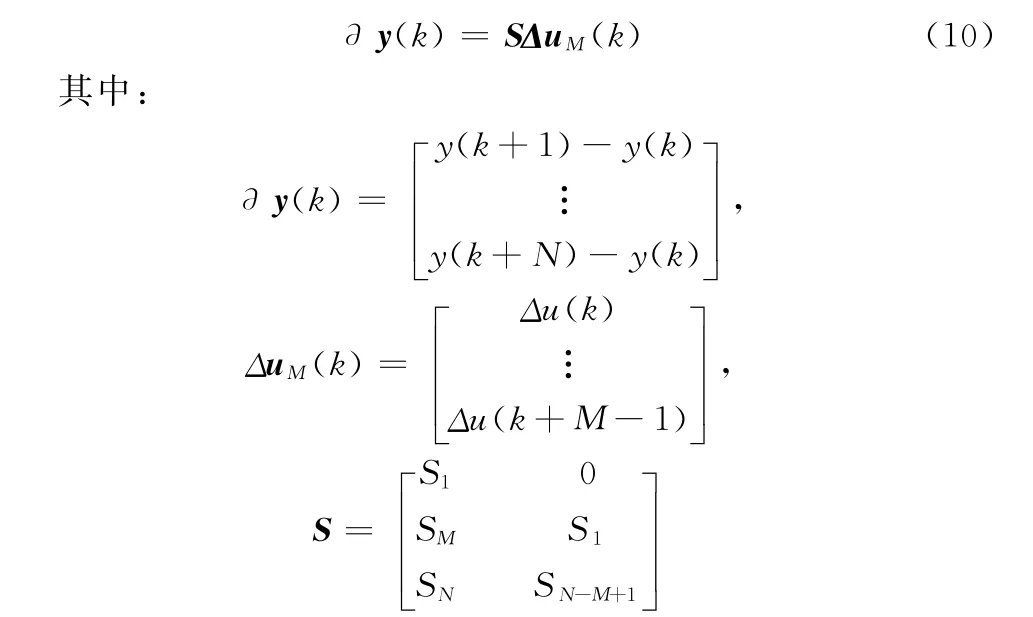
符号∂与Δ只有在处于稳态时的意义才是一样的,所以系统的稳态方程可以描述为:

其中:Δy(∞)=[Δy1(∞),Δy2(∞),…,Δyp(∞)]T,为系统在一段时间的运行过后达到稳态时的输出变化量;Δu(∞)=[Δu1(∞),Δu2(∞),…,Δum(∞)]T相应的为系统系统稳态输入变化量;SN是系统的稳态增益矩阵:
2.2 稳态目标的计算
稳态目标的计算问题是在现有的反应过程情况下,实现经济或者环境效益最大化的问题,根据情况设置目标代价函数,形成LP(Linear Program)或者QP(Quadratic Program)问题。一般的目标函数描述为:

其中:Jsstc是指根据控制输入和被控输出变化所导致的经济或者环境成本改变的目标函数;αT=[α1,…αm]T为控制输入的系数向量;βT=[β1,…βn]T为各个受控输出的系数向量;是指各个输入当前时刻的稳态变化量;是指各个输出在当前时刻稳态变化量。
由于Δu∞(k)与Δy∞(k)为线性相关,所以目标函数可以统一为控制输入的形式,即可以表示为:

其中:cT=[c1,…cm]T表示各个控制输入变化所所导致对经济或者环境目标产生影响的系数,考虑到稳态约束条件,优化问题可以通过式(8)得到:
根据此公式求得最优控制量和最优受控输出作为设定值传到下层的动态控制层。
2.3 动态层的分布式控制
上层稳态优化得到的最优控制量和最优受控输出在每一个控制时刻传递到下层的动态控制层之中,下层对得到的稳态目标进行跟踪,即跟踪y∞(k),即式(2)中的参考轨迹w(k),同时跟踪u∞(k),通常写作u*(k)。
假设一个系统是由l个子系统构成,任意一个子系统i的预测模型则为:

则子系统的性能指标表示如下:
其中:Qi=block-diag{Qi,1,…,Qi,p}为子系统的输出的误差权矩阵;Ri=block-diag{Ri,1,…,Ri,M}为输入变化量的权矩阵,目的是抑制输入变化,使其变化不过于强烈,保证系统的稳定性;Si=block-diag{Si,1,…,Si,M}为当前时刻计算出的即时控制量与上层优化计算出的输入的误差权矩阵;其中uM(k-1)为上一时刻的控制量,u*M(k)为上层稳态优化计算得到的最优控制量取值,将这一项加入到性能指标式当中,可以使得控制量尽可能接近于我们上层稳态优化求得的最优控制量取值,而最优控制量取值与经济环境指标有一定的关联,所以这一项的加入的目的是为了在满足于各个子系统的输出轨迹与上层稳态优化的输出轨迹拟合的同时,能够将控制量保持在较好的范围之内,满足了我们之前提出的经济和环境指标的优化。
通过式(16),可以计算出子系统i的最优控制增量序列:
实际需要施加给系统的控制增量实则仅仅为增量序列的第一项。
使用的集成控制策略,实现复杂大系统的集中优化与分布式预测控制。通过上层的稳态优化计算出输入输出在稳态时候的最优值,以其代替传统的人为设定或者历史经验值。动态控制层使用分布式模型预测控制算法将一个复杂的大规模系统优化问题被分解到各子系统单独执行,进行分布式MPC算法求解,其计算复杂度与集中式相比大大降低;但由于网络的交互,各子系统之间可以通过通信网络进行信息交换,使得该算法的全局性能得以保持。在进行优化变量的求解过程中,与传统的模型预测控制不同的是,通过加入了对控制量设定值的跟踪,希望以此能够达到降低生产成本、减少污染排放的、提高利用率的目的。
3 实验仿真
壳牌重油分馏塔控制系统是一个较复杂的系统,包含着多输入输出和约束条件。抽取产品的出口有3个,3个回流通过管道反回分馏塔。分馏塔顶部和侧线抽出的产品性能要求的决定条件为经济性和操作条件,分馏塔底部的抽取液无性能要求,但却有温度操作约束。该重油分馏塔的过程模型如下:
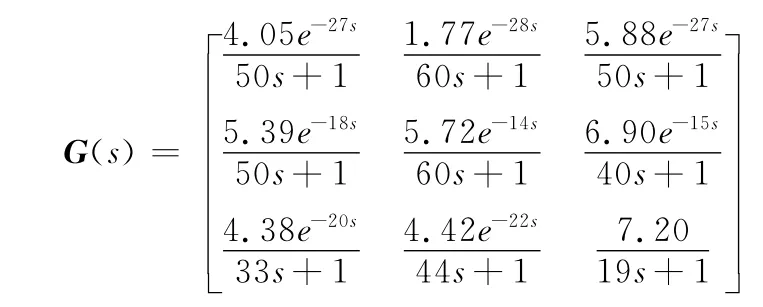
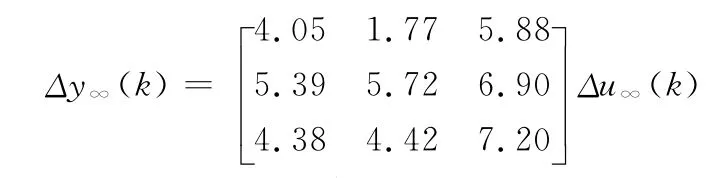
其中:产品从塔顶的抽出含量u1、分馏器从侧面抽出产品的含量u2、分馏器底部流会塔内的产品热负荷u3,分别作为系统的输入。分馏器顶的产品的提取成分y1、分馏器壁产品的提取成分y2、分馏器底的回流温度y3作为系统的输出。由动态模型可计算得到其稳态预测模型:
为上层的稳态优化设定代价系数:c1=-2,c2=-1,c3=1。c1,c2和c3分别为u1,u2,u3变化对目标函数产生影响的系数。因为稳态优化的目标函数为:,可以看出当抽出率u1和u2越大,回流的热负荷u3越小,分馏塔生产过程的效率越高,资源浪费越少,因此经济效益越好。
将预测时域设置为60,控制时域10,采样次数500,各个权数矩阵分别设定。
对此系统进行集中优化与分布式控制,上层稳态优化仿真结果如图2所示。
从仿真的结果来看,稳态优化计算出的输出和输入的设定值为:



图2 上层稳态优化结果
将这一计算结果分别作为设定值施加到分布式控制,得出的仿真结果如图3所示。

图3 分布式控制仿真结果
由图3可知,集中优化与分布式的控制性能能够满足要求,对设定值的追踪效果也很明显。
对此系统使用集中优化与集中式控制,集中优化结果同上述集中优化-分布式控制方案,集中控制结果如图4所示。
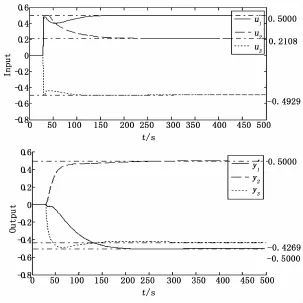
图4 集中控制仿真结果
比较图4和图3可知,在控制性能上分布式控制比集中控制稍逊,没有集中式控制精确,但是由于考虑到每个子系统之间的耦合关系,使得控制性能下降并不多。从另一方面看,与集中式控制相比较,分布式控制的收敛速度很快,迭代时间较少。在计算机(inter(R)Core(TM)i3 CPU 2.27 GHz,2.5 G内存)环境下,双层结构下的分布式控制与集中控制求解500次计算时间对比如表1所示。
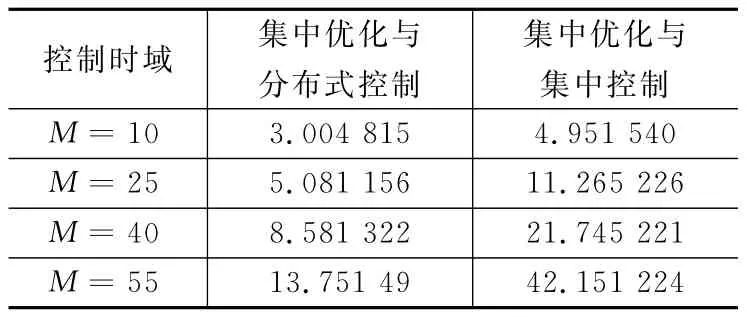
表1 两种算法计算时间对比t/s
从表1可以看出,双层结构集中优化与分布式控制方案在控制性能损失较小的情况下降低了动态控制求解的时间,提高算法的收敛速度,使得控制器的控制效率变高。
下面我们再对各个子系统分散进行稳态优化,并进行分布式控制,仿真结果如图5所示。
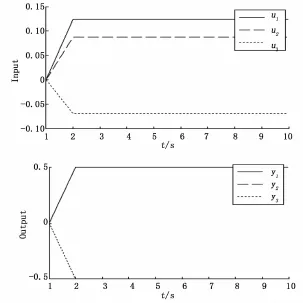
图5 子系统稳态优化仿真结果
上层稳态优化计算出的被控输出和控制输入的设定值为:

分别对各个子系统进行控制,仿真结果如图6所示。
比较图6与图3,子系统分散优化方案对子系统分别进行稳态优化和控制,忽略了各个子系统之间的关联性,所以其全局性能比较低,通过我们之前设置的代价系数c1、c2和c3,集中优化分布式控制的性能指标为-1.703 7,子系统分散优化分布式控制的性能指标为-0.403 8,因为性能指标是以最小化来表示的,明显看出集中优化与分布式控制的性能指标的目标值比分散式小1.299 9,即可以节省1.299 9份生产成本,对成本控制、环境保护指标等方面的优化效果要好很多。
4 结论
针对当前工业生产与成本节约、环境保护等诸多方面的矛盾,将分布式模型预测控制引入到双层结构模型预测控制的动态控制层当中去。在上层稳态优化层计算各个稳态目标值以此代替人为设定的数值,可以有效提高一些经济或者环境指标。在动态控制层使用分布式控制,降低了大系统的计算时间与复杂度的同时考虑到各个系统之间的耦合,求解控制律兼顾了其余各个子系统,保证了动态层控制的全局性。最后以分馏塔模型进行仿真,证实了提出的集中优化与分布式预测控制集成方案有着很好的控制性能,提高了控制效率的同时保证了算法的全局性,另外对优化一些经济环境指标优化有一定的效果。

图6 子系统动态控制仿真图
[1]Li S Y,Zheng Y,Wang B P.Stead-state target calculation for constrained predictive control systems based on goal programming [J].Journal of Shanghai JiaotongUniversity,2008,42(10):1702-1706.
[2]邹 涛,王丁丁,潘 昊,等.从区间模型预测控制到双层结构模型预测控制[J].化工学报:过程系统工程,2013,64(12):4474-4483.
[3]魏 峰,邹 涛,于 浩,等.双层结构预测控制计算复杂度分析[J].华东理工大学学报:自然科学版,2013,39(1):102 -107.
[4]杜晓宁,席裕庚,李少远.分布式预测控制优化算法[J].控制理论与应用,2002,19(5):793-798.
[5]杜晓宁,席裕庚,李少远.分布式预测控制算法的性能分析[J].控制与决策,2002,17(2):0226-0229.
[6]张运诗,仲兆准,钟胜奎,等.分布式预测函数控制优化算法[J].自动化仪表,2014,35(7):068-072.
[7]陈 庆,李少远,席裕庚.基于全局最优的生产全过程分布式预测控制[J].上海交通大学学报,2005,39(3):349-352.
[8]Zeng J,Xue D Y,Yuan D C.Amulti-model predictive control strategy based on data-centric[A].Fourth International Conference on Natural Computation[C].Jinan,2008:313-316.
[9]邹 涛,魏 峰,张小辉.工业大系统双层结构预测控制的集中优化与分散控制策略[J].自动化学报,2013,39(8):1366 -1373.
[10]魏 峰.工业大系统双层结构预测控制算法及策略研究[D].杭州:浙江工业大学信息工程学院,2013.
Integration of Real-time Optimization and Distributed Predictive Control
Yang Kai,Li Lijuan,Xue Feifei
(School of Electrical Engineering&Control Science,Nanjing Tech.University,Nanjing 211800,China)
Predictive control has been widely applied as an advanced process control methodology in complex industrial processes control.Distributed predictive control was mainly proposed for complex and high dimensional large scale system.In this paper,an integrated algorithm of real-time optimization and distributed predictive control is put forward for large scale processes,which includes one layer of steady state objective calculation and another layer of dynamic control.Centralized optimization is implemented in the layer of steady state objective calculation,in which steady optimal value is calculated.Then steady optimal value is conveyed to the layer of dynamic control.In the layer of dynamic control,complex and large scale system is divided into multiple subsystems fully considering the association and coupling.For improving dynamic performance of system,distributed predictive control is used to track the set point from the layer of steady state objective calculation.The simulation shows the advantages of this method in global optimizaion,reducing complexity of calculation and achieving the economic goals.
predictive control;two-1ayered MPC;steady-state optimization;distributed
1671-4598(2016)08-0074-05
10.16526/j.cnki.11-4762/tp.2016.08.020
:TP13
:A
2016-03-25;
:2016-04-25。
杨 凯(1991-),男,江苏淮安人,硕士研究生,主要从事工业过程先进控制方向的研究。
