越野汽车软地面通过性动态测试系统
2017-01-07张和明
张和明, 魏 建, 赵 明
(63969部队,南京 210028)
越野汽车软地面通过性动态测试系统
张和明, 魏 建, 赵 明
(63969部队,南京 210028)
软地面通过性是越野汽车的重要性能指标之一,现有的通过性试验和测试手段比较单一,无法进行动态测量,实验数据的缺乏已成为地面通过性试验评价研究的一大阻碍.针对该问题,提出以车轮力传感器为核心的动态测试系统,集成GPS、高清摄像机以及便携式土壤测试仪等传感器,对轮壤间相互作用的关键物理量进行实时动态同步采集.在铺装地面和3种软地面工况下进行了实车试验,从试验数据分析可以看出,动态测试系统性能稳定可靠,能够用于越野汽车地面通过性的试验评价研究.
软地面通过性;车轮力传感器;动态测试系统;试验评价
越野汽车的软地面通过性是指车辆以一定速度通过泥泞、滩涂、沼泽以及沙漠等各种松软路面的能力.越野汽车需要能够适应各种不同的地域条件,良好的软地面通过性是其执行各种任务的重要保证.因此,研究越野汽车的软地面通过性具有十分重要的意义.
软地面通过性研究是车辆地面力学的重要部分,其研究方法理论和试验并重.目前,针对车辆软地面通过性的研究方法主要有3种:半经验模型法[1];经验模型法[2];数值模拟法[3].每种研究方法都有相应的试验装备.半经验模型法采用贝氏仪和剪切环分别测量土壤的承压参数和剪切参数.经验模型法只涉及一个土壤综合机械指标,即土壤圆锥指数,采用圆锥指数仪测量.典型的数值模拟法有有限元分析法和离散元分析法等[4-5],通常使用模型试验来验证理论模型,如被广泛使用的单轮土槽试验台[6-7].由此看出,目前的试验方法主要集中于静态土壤参数测试和模型台架试验.近年来,国外开始提出用实车试验方法来支持车辆软地面通过性研究[8-9],主要引入了车轮力传感器、雷达、视觉传感器等检测技术对轮壤相互作用结果进行动态测量.国内的相关研究,仍然以模型试验为主.
基于以上考虑,本文综合集成多种传感器和测量手段,搭建了一套车辆软地面通过性实车动态测试系统.基于该系统,设计并进行一系列实车试验,在验证系统有效性的同时来揭示实车试验数据在车辆地面通过性理论研究中的潜力与价值,以期为轮壤模型的进一步研究奠定坚实的数据基础.
1 动态测试系统
根据轮壤相互作用模型的参数测量需求[10],动态测试系统以车轮力传感器为核心,集成GPS、轮速传感器、高清摄像机和便携式土壤测试仪等设备,系统结构如图1所示.车轮力传感器来测量轮壤相互作用中最为关键的3个动态响应,即挂钩牵引力Dp、载荷W及驱动扭矩T;GPS测量车速V;轮速传感器采集车轮转速ω,用于计算车轮滑转率s;高清摄像机记录轮壤相互作用情况,用于估计车轮的沉陷量;圆锥指数仪及含水率测试仪测量土壤圆锥指数CI和含水率MC,评估土壤综合特性.多传感器的数据经同步采集后,经过小波滤波的预处理,最后输出并保存试验数据.

图1 软地面通过性动态测试系统结构图
1.1 系统硬件配置
(1)车轮力传感器
车轮力传感器作为重要的汽车道路试验研究技术,已被广泛应用于车辆性能试验研究中.车轮力传感器的详细测量原理可参考文献[11],可测量车轮所受六维轮力,包括:纵向力Fx、侧向力Fy、垂向力Fz和侧倾力矩Mx、侧向力矩My、回正力矩Mz.结合轮壤相互作用模型中力的定义可知[10],六维轮力中的纵向力Fx即为轮壤相互作用中的挂钩牵引力Dp,垂向力Fz为垂向载荷W,而侧向力矩My为驱动扭矩T.因此,车轮力传感器可用于测量核心动态响应参数Dp、W和T,表1给出了其测量精度.
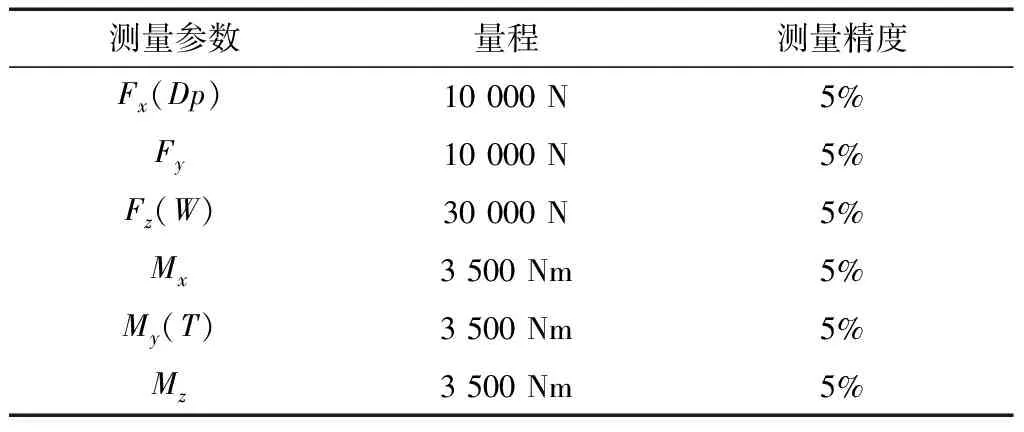
表1 车轮力传感器测量精度
(2)GPS和轮速传感器
车轮滑转率s是轮壤模型研究中一个关键的动态观测量.研究表明挂钩牵引力、扭矩、牵引效率等都和滑转率密切相关[6].可利用车速和转速估算滑转率s,见式(1).运用GPS测量车速V,GPS接收天线固定于车顶,接收机放在车内与采集电脑相连接.使用轮速传感器测量车轮转速ω.
(1)
(3)视觉传感器
采用类似研究者Reina提出的视觉估算方法来获取车轮在松软土壤中的沉陷量[12].高清摄像机对车辆行进中车轮与软地面的接触情况进行记录.如图2所示,带有吸盘的支架将高清摄像机固定在车轮左侧车身,车轮边缘喷成白色以提高土壤和车轮的分辨效果.视觉方法对环境要求较高,也可采用如文献[13]所提出的基于激光测距的车轮沉陷量测量方法,以提高沉陷量的估算精度.
(4)土壤参数测量设备
在场地试验中,需要对土壤状况进行综合性评估.动态测试采用两款便携式土壤测试仪:sc-900土壤紧实度仪和基于土壤导电率的含水率测试仪,实现对土壤圆锥指数和土壤含水率的快速测量.
1.2 软件系统设计
由于硬件选型配置原因,视觉传感器及土壤参数测量传感器暂未接入上位机数据采集系统,而是独立进行采集,试验后手动录入采集系统软件.因此,上位机采集系统主要是要对车轮力传感器、轮速传感器和GPS 3个传感器信息进行实时同步获取.
采集系统软件总体架构图见图2,主要包括系统配置、实时控制、实时显示和数据管理4个子功能模块.系统配置模块主要用于试验前对试验设备进行管理及进行基本的系统设置;实时控制模块主要用于对试验过程进行控制,以完成整个数据采集过程;实时显示模块提供友好的显示界面,以便实时观测数据及对试验过程进行监控;数据管理模块用于查询以往数据文件,并提供数据预处理及分析功能.采集系统软件界面见图3.

图2 采集系统软件架构

图3 上位机采集系统软件界面
2 实车试验及分析
为检验所提出动态测试系统的有效性及体现其在轮壤模型研究中具有的潜力,设计并进行了一系列场地试验.首先,鉴于硬地面上车辆的动态性能研究已较为成熟,视为已知,可用于验证系统有效性;其次,根据硬地面测试结果对动态测试系统进行系统微调,并选取水稻田进行软地面通过性试验.轮壤模型研究中,要求得到尽可能大的滑转率变化范围及车速变化范围,实车试验主要以直线加速制动试验为主.
试验时使用了一辆5.2吨重的四驱越野汽车,并将动态测试系统进行实车安装.具体的试验步骤如下:
(1)试验前,使用便携式圆锥指数仪和含水率测试仪对试验场地的土壤条件进行测量与记录,选取同一片场地中不同测试点进行多次测量来减小测量误差;
(2)打开各路传感器,检查并确认各传感器均处于正常工作状态;
(3)驾驶车辆按设定试验路线进行场地试验,试验过程中车辆的动态响应由集成采集系统获取并保存;
(4)同一场地同一工况,进行2至3次重复性试验,以避免由意外状况引起数据的错误或丢失.
2.1 硬地面试验验证
为验证所提出动态测试系统的有效性,在硬地面上进行了最高速度分别为30 km/h、40 km/h、50 km/h的直线加速制动试验.图4为一组最高通过速度40 km/h的直线加速制动试验数据.试验过程中,车辆从静止状态加速至40 km/h,然后紧急制动直至停止.图4(a)为车辆挂钩牵引力Dp和扭矩T的对比图.曲线比较准确地反映了车辆的整个行驶过程:在加速阶段,Dp保持在一个稳定的数值范围,提供车辆加速所需牵引力;当刹车时,Dp快速地由正值下降至负值,对应刹车及行驶阻力给轮胎的制动力.由车辆动力学可知,Dp是随着T的输入变化而变化,此过程中,Dp保持着与T相同的变化趋势,符合车辆动力学原理.图4(b)为载荷与扭矩的对比情况.试验车辆自重5.2吨,分配到右前轮的重量大约为1.5吨.从曲线可以看出,加速过程中,W保持在15 kN附近;制动的瞬间,W有较大幅度的增加,由紧急制动引起的车体俯冲造成,数据来自右前轮,因此表现为数值上的突然增加.从T、Dp和W曲线后半部分均可看出,在紧急制动过程之后,数据曲线有一个剧烈振荡的过程,且幅度较大.这是由于车辆从40 km/h的速度紧急停止后,车辆巨大的惯性引起车身剧烈的前后俯仰所造成.图4(c)是车辆行驶过程中车速和轮速的情况.在加速过程中,由于滑转率的存在,车速的增长慢于轮速,在减速过程中,情况相反.图4(d)为对应的车轮滑转率,加速过程中稳定在0.1左右,减速过程中变为负值.
硬地面试验分析表明,无论在数值还是变化趋势上,试验曲线与实际试验过程表现均相一致.

图4 硬地面直线加速制动试验结果
2.2 软地面试验验证
在对动态测试系统进行硬地面试验验证的基础上,设计了一系列软地面通过性试验,旨在获取有效的车辆软地面行驶数据,以展示其在轮壤模型研究中的潜力.试验选取3种不同类型软地面进行了场地试验,分别为水稻田地、翻耕地和沙地.使用圆锥指数仪和含水率测试仪对土壤状况进行了快速测定,表2为3种软地面不同深度下的土壤圆锥指数,对应的含水率分别为39%、22%和17%.表3为测定的3种类型土壤样本的物理参数.

表2 软地面土壤圆锥指数CI/kPa

表3 软地面物理参数
图5以水稻田为例显示软地面通过性测试结果.从图5(a)可以看出,挂钩牵引力Dp随着扭矩T的变化而变化,有较好的跟随效果.曲线充分反映了直线加速制动的整个过程,与实际驾驶行为相符.图5(b)为动态载荷W变化与扭矩T比对图.在刹车的瞬间,载荷W有较为明显的增加,车辆停止后恢复静态载荷状态.总体来看,软地面
上呈现的动态响应变化与硬地面相类似,但是在数值上体现出了明显的区别.软地面加速行驶过程中,相似的驾驶行为得到了较低的挂钩牵引力Dp和扭矩T响应,T为500 Nm左右,Dp约为800 N;而在硬地面加速过程中,T维持在1 500 Nm左右,Dp在2 500 N附近.在制动过程中,软地面上所能提供的制动力与制动扭矩T也有大幅度的降低,在硬地面上出现的制动过程曲线振荡并没有出现在软地面动态响应中,制动力的降低减弱了紧急制动效果,剧烈的车身晃动效果有所削弱.以上分析表明,车辆在软地面上的通过性能较硬地面有明显降低.此外,滑转率s的动态响应也印证了这一点.图5(c)为软地面试验中车速V与轮速ω响应,对应的滑转率s表现如图5(d)所示.加速过程中,滑转率s较硬地面上有显著的提高,最高为0.9左右,而硬地面滑转率s始终维持在0.1左右.滑转率s的升高意味着车辆行驶效率的降低,同时也反映出车辆通过性能力的降低.加速过程中获得了较宽滑转率s范围0-0.9,有利于轮壤模型的研究.
软地面测试结果表明,动态测试系统在软地面上同样具有良好的测量表现,试验曲线较好地刻画了整个测试过程,完成了对扭矩T、载荷W、挂钩牵引力Dp和滑转率s的实时采集.

图5 水稻田通过性试验结果
3 结 论
根据试验结果分析可以看出,在几种不同路面的试验中,动态测试系统都具有良好的测试表现,可以准确地测量车辆试验过程中的动态参数,能够正确再现关键参数的连续变化过程,测试精度满足研究需求,可以为越野车辆软地面通过性研究奠定良好的试验基础.
[1] Bekker M G.Theory of Land Locomotion [M]. Ann Arbor: The Universityof MichiganPress,1956.
[2] Priddy J D, Willoughby W E. Clarification of vehicle cone index withreference to mean maximum pressure [J].Journal of Terramechanics, 2006, 43(2): 85-96.
[3] Tiwari V K, Pandey K P, Pranav P K. A review on traction predictionequations [J].Journal of Terramechanics, 2010, 47(3): 191-199.
[4] Fervers C W. Improved FEM simulation model for tire-soilsimulation [J].Journal of Terramechanics, 2004,41(2-3):87-100.
[5] Khot L R, Salokhe V M, Jayasuriya H P W, et al. Experimental validation of distinct element simulation for dynamicwheel-soil interaction [J].Journal of Terramechanics, 2007,44(44): 429-437.
[6] Ding L, Gao H B. Experimental study and analysis on driving wheels’performancefor planetary exploration rovers moving in deformable soil [J].Journal of Terramechanics,2011,48(1): 27-45.
[7] Iagnemma K, Kang S, Shibly H, et al. Online Terrain Parameter Estimation for Wheeled MobileRobots WithApplication to Planetary Rovers [J]. IEEE Transaction on robotics, 2004, 20(5): 921-927.
[8] Lee J H, Johnson T H, Huang D, et al. Newintegrated testingsystem for the validation of vehicle snow interaction models [C]//Proceedings of the 2010 ground vehicle systemsengineering and technology symposium, August, 2010: 17-19.
[9] Pytka J. Modeling and System Identification of a Wheel-Soil System [J].SAE Technical paper,2007-01-0482.
[10]Wong J Y. Theory of Ground vehicles[M].4th ed,John Wiley & Sons, 2008.
[11]张为公.基于多维轮力测量的汽车道路试验系统研究与开发[D].南京:东南大学,2001.
[12]Reina G, Milella A, Panella F W.Vision-based Wheel SinkageEstimation for Rough-Terrain Mobile Robots [C]//15th Internationalconference on Mechatronics and Machine Vision in Practice(M2VIP08),2008: 78-80.
[13]Nam J S, Park Y J, Kim K U. Determination of rating cone index using wheel sinkage and slip [J]. Journal of Terramechanics,2010,47(4):243- 248.
Dynamic Testing System for Soft-terrain Trafficabilityof Off-road Vehicle
ZHANG He-ming, WEI Jian, ZHAO Ming
(63969 Troops, Nanjing 210028,China)
Soft-terrain trafficability is very important for a military off-road vehicle. The existing experiments and the testing methods are relatively simple, without the function for hte dynamic measurement. The lack of the experimental data has become a major obstacle for studying the testing evaluation of the vehicle trafficability. In order to solve the problem, a dynamic testing system is proposed based on the wheel force sensors, in which a GPS, a high-definition camera and some portable soil sensors are equipped. The dynamic synchronization acquisition for the key parameters of the wheel-soil interaction can be realized in real time. The tests of the real vehicles are carried out on both a paving road and three kinds of soft terrains. The experimental data shows that the designed dynamic testing system is of stable and reliable performance for ground trafficability evaluation research of the military off-road vehicle.
soft-terrain trafficability; wheel force sensor; dynamic testing system;test evaluation
1009-4687(2016)04-0009-06
2016-7-6
张和明(1976-),男,硕士,高级工程师.
U467.4
A
