地物自动转绘中的影像匹配及精度控制方法
2017-01-06王丹菂李鹏程
王丹菂,邢 帅,徐 青,李鹏程
(信息工程大学地理空间信息学院,河南 郑州 450000)
地物自动转绘中的影像匹配及精度控制方法
王丹菂,邢 帅,徐 青,李鹏程
(信息工程大学地理空间信息学院,河南 郑州 450000)
遥感影像判绘是地形图测绘中的一项重要工作,目前应用地物自动转绘技术是提高其作业效率的一个重要手段。其中,影像匹配是地物自动转绘中的关键技术,影像匹配的精度直接关系最终的转绘精度。为保证最终转绘结果满足精度需求,本文针对地物自动转绘中的影像匹配及精度控制展开研究,将一种迭代加密构网的匹配策略应用到地物自动转绘中,并提出了一种基于双阈值策略的匹配精度控制方法。通过对天绘一号卫星影像进行试验的结果表明,该方法在满足作业精度要求的情况下有效提高了作业效率。
影像判绘;地物自动转绘;精度控制;天绘一号
遥感图像判绘是数字摄影测量方法成图技术过程的重要组成部分,是获取地形要素属性信息的基本方法[1]。 随着以天绘一号和资源三号卫星为代表的一系列具备获取大范围高分辨率影像能力卫星的发射,高分辨率影像的处理与应用逐渐成为当前的研究热点。目前,利用高分辨率卫星影像进行判绘的方法是首先在高分辨率影像上进行判绘,再通过人工二次判读实现地物点从高分辨率影像到三线阵影像的转绘,最后在三线阵影像上解算地物的物方坐标。这种作业方式不仅效率低,且因三线阵影像分辨率的限制,难以获得较高的判绘精度。
地物自动转绘技术可实现地物从高分辨率影像到三线阵影像的自动转绘。利用地物自动转绘技术,高分辨率影像的判绘成果可以自动转绘到三线阵影像上,从而减少了人工作业量。
其中,影像匹配是该技术的关键。由于高分辨率影像与三线阵影像是不同传感器获取的影像,它们之间存在着明显的几何变形,匹配的成功率和准确性都难以保证。针对该问题,本文提出一种迭代加密构网的匹配方法,逐级分层加密控制,以保证匹配的可靠性与精度;且为实现对匹配过程的精度控制,提出一种基于双阈值策略的匹配精度控制方法,从几何角度分析确立阈值与匹配精度的关系。
一、地物自动转绘技术
1. 技术流程
在新的判绘作业模式中,作业员首先依据相关参考资料在高分辨率影像上进行单片判绘;然后利用地物自动转绘技术将高分辨率影像上的地物自动转绘至三线阵影像上,在立体条件下对转绘结果进行检查;最后通过前视、后视影像上的同名点空间前方交会计算相应地物点的空间坐标,作业流程如图1所示。

图1 新的判绘作业流程
与传统的判绘作业模式不同,新的判绘作业模式不再采用人工二次判读的方式将高分辨率影像上的地物手工转绘至三线阵影像,而是利用地物自动转绘技术,通过影像匹配的方法,自动识别三线阵影像上的同名地物实现转绘。
地物自动转绘技术主要可分为两个步骤:高分辨率影像与三线阵下视影像的匹配和三线阵下视影像与前后视影像的匹配。其中,高分辨率影像与三线阵下视影像的匹配属于多源影像匹配,匹配难度较大,匹配成功率与准确度难以保证,因此本文采用了一种迭代加密构网的匹配策略。三线阵下视影像与前后视影像的匹配则采用文献[2]中基于物方的多视匹配方法实现,本文不再详述。
2. 高分辨率影像与三线阵下视影像的匹配方法
为保证高分辨率影像与三线阵下视影像的匹配的可靠性与精度,本文运用了迭代加密构网的匹配方法,其流程如图2所示。
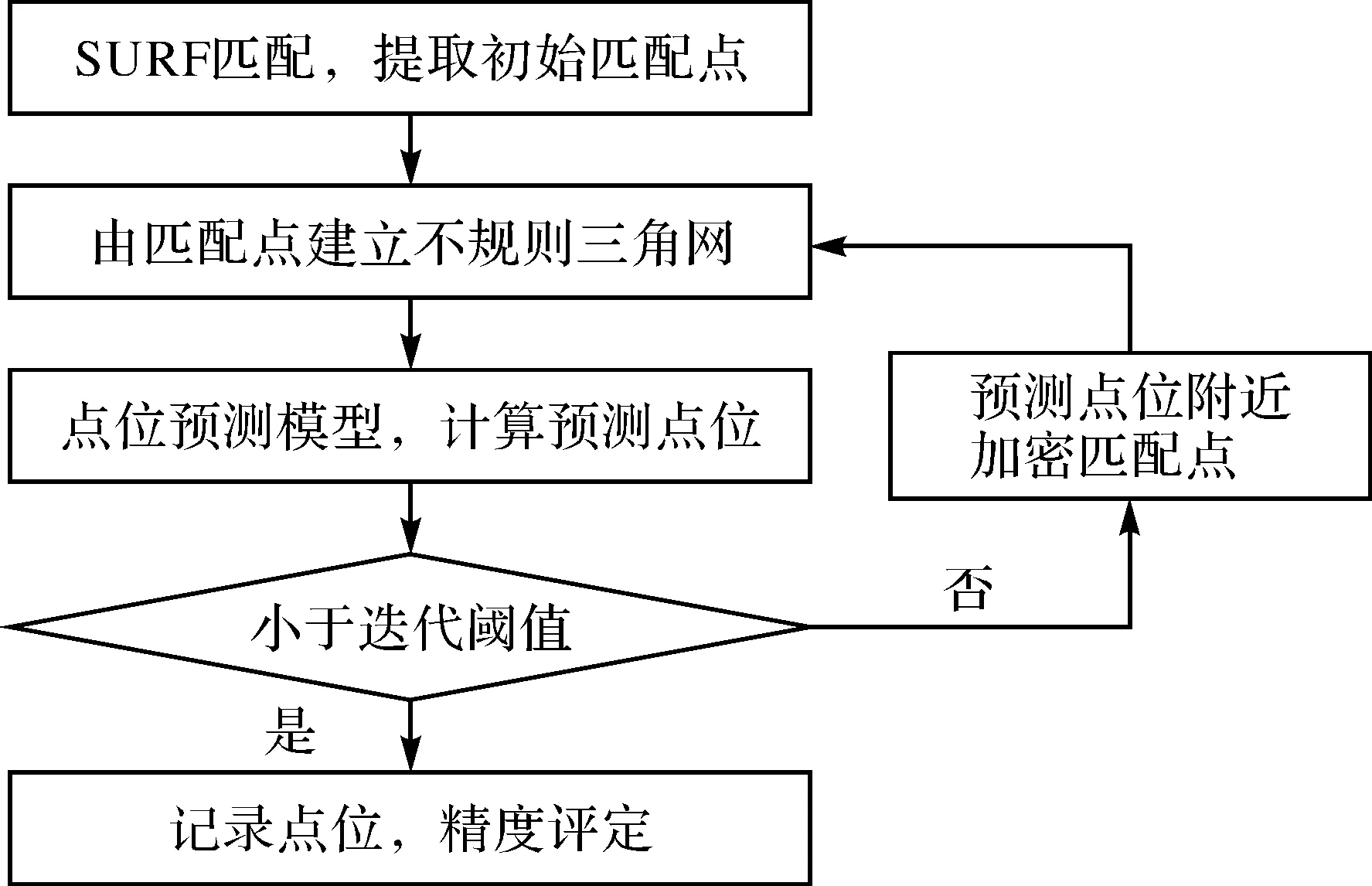
图2 高分辨率影像与三线阵下视影像匹配流程
具体流程为:
(1) 初始匹配点获取
对影像进行分块匹配。将每一子块中最优匹配点保留,获取精度可靠且分布均匀的初始匹配点。
(2) 不规则三角网的构建
将匹配点作为 “锚点”,构建匹配点的Delaunay三角网。
(3) 点位预测模型
依据匹配点的三角网先由仿射变换确定匹配搜索窗口的中心,再将搜索窗口内相关系数的极大值点作为预测点位。
(4) 迭代判断
本文提出了一种基于几何相似性的迭代判断条件,以预测点位在三角形中的几何位置为依据进行迭代判断。如图 3所示,(a)为高分辨率影像,A、B、C是三角网中地物点P所在三角形的3个锚点;(b)为下视影像,点A′、B′、C′为点A、B、C同名点,P′为预测点位。当预测点位P′满足迭代判断条件
(1)
则终止迭代;否则在预测点位的附近提取更多的匹配点作为锚点,重新构网,得到更加密集的三角网并重新进行预测。经过反复迭代,预测点位逐渐准确,直到满足迭代判断条件,即符合精度需求。

图3 迭代判断示意图
二、地物自动转绘技术精度控制
1. 基本原理
高分辨率影像与三线阵下视影像匹配需要设定角度阈值Ta和长度阈值Tl,若为保证匹配结果的可靠性,将两个阈值设定过小,会导致许多正确的匹配点被误判;若要减少误判率,将这两个阈值设定过大,则可能引入误差点。理想的阈值选择原则是在能够囊括尽可能多的正确匹配点的同时不引入误差点。匹配的精度控制问题由此转换成了阈值的选择问题。
针对上述分析,本文提出了一种确定阈值的方法:对不同阈值条件下的匹配误差范围进行估计,计算对应阈值条件下的匹配精度,建立阈值与匹配精度的关系,以确定需求精度下的最优阈值。
2. 匹配误差范围
从几何角度分析迭代判断条件式(1)所确定的匹配误差范围,发现匹配误差范围实际上由三角形的各顶点在阈值条件下的限制范围所决定,即3个范围重叠的区域,如图4所示。

图4 匹配误差范围示意图
图5是实际情况下地物点匹配误差范围的局部放大图,图中三度重叠的灰色区域即为地物点的匹配误差范围。从图中可以看出,匹配误差范围可以近似看作以仿射变换的预测点位为中心的多边形,成对称分布,但是多边形的边数、形状、大小不固定。

图5 匹配误差范围局部放大图
3. 阈值与匹配精度的关系确定
匹配误差范围的不规则使得采用解析的方法精确计算其面积比较困难。考虑到影像本身也是由离散的像素点构成的,将匹配误差范围离散化并不会引入附加误差,本文从离散的角度出发,对像素化的匹配误差范围进行分析,通过计算匹配误差范围的外接圆半径,利用外接圆半径衡量匹配精度,从而构建阈值与匹配精度之间的关系。具体过程如下:
1) 在地物点所在三角形中,标记落入匹配误差范围内的像素,得到像素化的匹配误差范围。
2) 计算匹配误差范围的外接圆及外接圆半径,如图6所示。
3) 变换阈值按步骤1)、2)计算大量地物点的误差范围外接圆半径,并对结果进行统计分析,作为对应匹配精度的估计值。
4) 根据匹配精度要求选择最优阈值。

图6 像素化的匹配误差范围及外接圆
表1是将角度阈值设定为10°,变换长度阈值进行试验的结果;表2是将长度阈值设定为10像素,变换角度阈值进行试验的结果。试验结果表明:角度阈值与长度阈值均会对误差范围外接圆半径产生影响,角度阈值的影响程度较长度阈值更大。在角度阈值固定的条件下,长度阈值与误差范围外接圆半径最初近似呈线性关系,当长度阈值大于一定限值后,长度阈值对误差范围外接圆半径几乎不产生影响。在长度阈值固定的条件下,角度阈值与误差范围外接圆半径近似呈线性关系。

表1 误差范围的统计分析(长度阈值变化)

表2 误差范围的统计分析(角度阈值变化)
按照地物判读3个像素的精度要求,合适的阈值应当将误差控制在±3个像素以内。然而考虑到仿射变换估计点位与真值之间的偏差,误差范围外接圆比误差范围稍大等因素,实际情况下可以适当放宽阈值选择条件。
三、试验分析
本文试验数据为某地区天绘一号卫星的高分辨率影像和三线阵影像。天绘一号卫星是我国第一代传输型立体测绘卫星,可获得2 m分辨率的高分辨影像和5 m分辨率的三线阵影像,其中包括三线阵影像的有理函数模型的RPC参数[3]。
图7、图8分别为水系与植被在高分辨影像上人工采集的结果及通过地物自动转绘技术转绘至三线阵前后视影像上的结果(角度阈值和长度阈值分别设置为10°和10像素)。从试验结果可以看到,即使高分辨率影像与三线阵影像之间存在明显的几何、辐射差异,地物自动转绘技术依然能够准确地将地物从高分辨率影像自动转绘至三线阵影像。表3是试验影像转绘结果的统计,可以看到绝大部分影像转绘的正确率均在98%以上,除了个别山地地区(46-155影像),由于高差较大、地物稀少、纹理单一,导致转绘正确率有所下降。

表3 试验影像的转绘结果统计

图7 单片地物判绘与自动转绘结果之一

图8 单片地物判绘与自动转绘结果之二
四、结束语
本文立足于目前测绘生产中的实际需要,深入研究了影像判绘中的地物自动转绘技术,并通过试验验证了相关模型和算法的有效性。针对高分辨率影像与三线阵影像的匹配,本文提出了一种基于双阈值策略的匹配精度控制方法,从几何的角度直观地对匹配过程中迭代阈值的精度控制能力进行了分析,对迭代阈值设置的合理性进行了解释。试验结果表明,本文方法可以在不降低判绘精度的前提下,减少人工作业量,有效提高作业效率。
[1] 冯伍法.遥感图像判绘[M].北京:科学出版社,2014.
[2] 纪松.多视匹配策略与优化方法研究[D].郑州:信息工程大学,2012.
[3] 张艳,王涛,冯伍法,等.“天绘一号”卫星三线阵CCD 影像自检校区域网平差[J] .遥感学报,2015,19(2):219-227.
[4] 芮杰.遥感影像数字判绘系统的设计与实现[D]. 郑州:信息工程大学,2005.
[5] 耿迅.火星形貌摄影测量技术研究[D].郑州:信息工程大学,2014.
[6] 范大昭,纪松,戴晨光,等.线阵影像GC~3多视匹配模型的匹配方向线研究[J].测绘通报,2013(9):19-23.
[7] BAY H, TUYTEPLAARS T, GOOL L V. SURF: Speeded up Robust Features[C]∥9th European Conference on Computer Vision. Graz, Austria:ECCV, 2006: 404-417.
[8] LOWE D G. Distinctive Image Features from Scale-invariant Keypoints[J]. International Journal of Computer Vision, 2004, 2004,60(2):91-110.
[9] 张继贤,李国胜,曾钰.多源遥感影像高精度自动配准的方法研究[J].遥感学报,2005,9(1):74-77.
[10] 袁满.面向全新地物判绘作业方式的实时匹配技术研究[D]. 郑州:信息工程大学,2011.
[11] XU Q, LAN C, GENG X. High Resolution Imagery and Three-line Array Imagery Automatic Registration for China’s TH-1 Satellite Imagery [J]. Studies in Surveying & Mapping Science, 2014(2).
[12] HE Y, XU Q, XING S. Multi-view Image Matching Algorithm Based on Chang'e-1 Lunar Image[C]∥Proceedings of SPIE——The International Society for Optical Engineering.[S.l.]:[s.n.],2011.
[13] 贾博,张锐,姜挺,等. 基于低阶多项式模型的星载线阵CCD影像光束法平差[J].测绘通报,2012(S1):323-325.
[14] 刘楚斌,张永生,范大昭,等. 资源三号卫星境外高精度定位方法研究[J].测绘通报,2015(9):6-8.
[15] 邢帅,徐青.多重约束下由粗到精的多源图像自适应配准算法[J].光电工程,2007,34(6):57-66.
Research on the Image Matching and Precision Control in Automatic Ground Features Transfer
WANG Dandi,XING Shuai,XU Qing,LI Pengcheng
2016-04-14
国家自然科学基金(41371436)
王丹菂(1993—),女,硕士生,研究方向为数字摄影测量。E-mail:WDD_93@163.com
王丹菂,邢帅,徐青,等.地物自动转绘中的影像匹配及精度控制方法[J].测绘通报,2016(12):44-47.
10.13474/j.cnki.11-2246.2016.0398.
P237
B
0494-0911(2016)12-0044-04
