北斗高精度相对定位选星方法研究
2017-01-03伍劭实赵修斌庞春雷刘亚东
伍劭实,赵修斌,庞春雷,段 荣,刘亚东
(1.空军工程大学 信息与导航学院,陕西 西安,710077;2.中国人民解放军95853部队,北京 100076)

北斗高精度相对定位选星方法研究
伍劭实1,赵修斌1,庞春雷1,段 荣1,刘亚东2
(1.空军工程大学 信息与导航学院,陕西 西安,710077;2.中国人民解放军95853部队,北京 100076)
针对北斗系统中高轨卫星会带来较全球定位系统(global positioning system ,GPS)更为严重的法方程病态性这一问题,分析了双差载波相位观测方程系数矩阵对整周模糊度浮点解解算的影响,结合北斗系统三轨道星座混合的特点,研究了区域北斗高精度相对定位选星方法,以仰角最高的地球同步轨道(geostationary earth orbit,GEO)卫星作为参考星,优先选取仰角高于10°的中地球轨道(medium earth orbit,MEO)卫星,然后按照均匀分布的原则选取倾斜地球同步轨道(inclined geosynchronous satellite orbit,IGSO)卫星。通过对实测数据进行试验和分析,证明了该方法的正确性和合理性,在进行区域北斗高精度相对定位时,能在一定程度上改善法方程的病态性,使模糊度浮点解较快收敛至真值附近,有利于模糊度的快速正确固定。
北斗系统;选星;相对定位;整周模糊度
0 引 言
卫星导航高精度相对定位在空中加油、舰载飞机着舰、飞机精密编队飞行等军事活动中具有广阔的应用前景,已成为当前主要研究热点,其关键技术之一是动态整周模糊度的快速准确固定,而固定时间往往受所选卫星影响。全球定位系统(global positioning system ,GPS)高精度相对定位通常以高仰角卫星作为参考星,并选取几何精度因子(geometric dilution precision,GDOP)值较小的卫星组合[1-3]进行解算;随着我国北斗系统的逐步应用,基于北斗的高精度相对定位技术也越来越受到关注,然而我国北斗系统是由地球同步轨道(geostationary earth orbit,GEO),中地球轨道(medium earth orbit,MEO),倾斜地球同步轨道(inclined geosynchronous satellite orbit,IGSO)三轨道星座混合而成,与GPS星座轨道具有明显差异,也就决定了其选星方法与GPS不尽相同。
当前,研究较多的选星方法主要是针对单点定位进行的,如最佳几何精度因子法、最大矢端四面体体积法等,这些算法大多计算量大,容易影响导航定位的实时性[4-6];文献[7]提出了基于卫星高度角和方位角的选星方法,但该算法仅针对6颗星的选星算法;文献[8]在此基础上进行了改进,使得选星颗数更为灵活,但文章没有考虑到北斗系统混合星座的特点。可以看出,目前大多数选星算法还较少涉及到相对定位,其在高精度相对定位中的适用性还有待于进一步研究,对此,本文针对北斗混合星座的特点,通过试验着重分析了GEO卫星对于相对定位中整周模糊度浮点解解算的影响,并研究了北斗区域系统高精度相对定位的选星方法。
1 双差方程对模糊度浮点解的求解影响
假设t1时刻观测到n颗北斗卫星,在短基线条件下,可写出n-1个双差载波相位观测方程[9],忽略双差测量噪声,则有
(1)
(1)式中:φij为双差载波相位观测量,i,j分别代表第i颗卫星和第j颗卫星;λ为载波波长;l为接收机至卫星的单位矢量;b=(bxbybz)Τ为基线矢量;Nij为双差整周模糊度。基线矢量b和模糊度Nij为待求未知量,而Nij一旦固定,则不随时间变化。将(1)式写为矩阵形式,即为
Φt1=Δlt1bt1+N
(2)

在t2时刻,(2)式变为
Φt2=Δlt2bt2+N
(3)
(4)
2 区域北斗相对定位选星方法
根据以上分析,得出北斗系统区域导航阶段下的相对定位选星方法步骤如下。
步骤1确定要选取的卫星颗数n;
步骤2计算所有可见卫星的方位角和仰角,然后排除掉仰角小于10°的卫星,假设共有a颗GEO、b颗IGSO和c颗MEO卫星(a+b+c≥n);
步骤3取仰角最大的GEO卫星作为参考星,则还需选取n-1颗星;
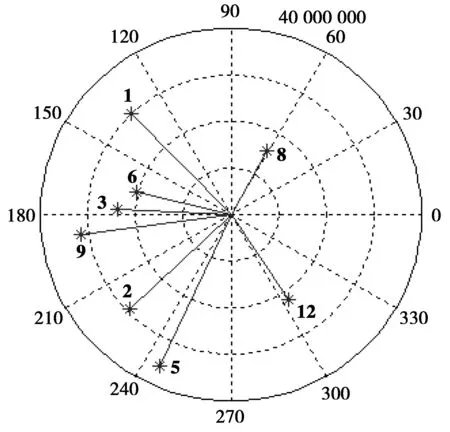
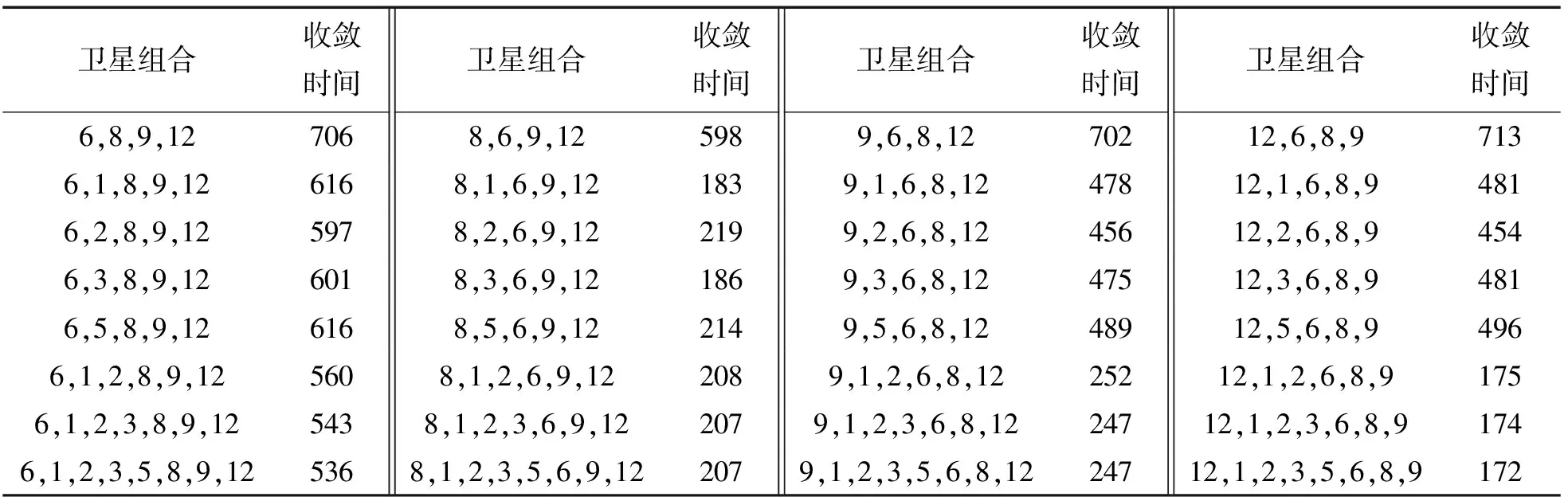
步骤4若b+c 步骤5若b+c≥n-1,如果c 以上选星方法有一个适用前提,即接收机性能要好,能够较好地捕获和跟踪低信噪比下的微弱信号[11-12],否则,来自高轨GEO卫星的信号质量较差,其精度误差会进入每一个双差观测方程,反而会使最终的相对定位结果变差。 3.1 试验条件 为验证所提出的相对定位选星方法的正确性与合理性,本文对2014年6月9日的实测静态数据进行处理与分析。试验地点为学院科研楼楼顶,试验所用2台接收机OEM板型号均为司南K501,均连接GPS-702-GG型号天线,数据采样率为1 Hz,设卫星截止高度角为10°,可观测到8颗北斗卫星,分别为4颗GEO卫星(PRN1,PRN2,PRN3,PRN5),3颗IGSO卫星(PRN6,PRN8,PRN9)和1颗MEO卫星(PRN12)。试验前测得基线长为3.49 m,数据采集时长为1.5 h。 3.2 试验过程 1)计算8颗卫星的方位角和仰角,结果如表1所示;然后画出方位面上的卫星分布图,如图1所示,该图与卫星的方位角相对应。 表1 卫星方位角与仰角 2)为了保证静态与动态均适用,首先对5星组合进行试验分析。从8颗北斗卫星中任选5颗作为一组,共56组,对于每一组卫星先用传统方法计算出双差整周模糊度的真值,然后计算模糊度浮点解收敛至距真值±10周范围内所用历元个数,按收敛速度的快慢排列,结果如表2所示(表2中每一组第1个数字表示参考星的卫星号,表3-表5与之相同)。 图1 方位面上卫星分布Fig.1 Satellite distribution on Azimuth plane 3)对于无GEO卫星组合,即“6,8,9,12”组合,逐颗增加GEO卫星,计算模糊度浮点解收敛至距真值±2周范围内所用历元个数;改变参考星,重复试验,结果如表3所示。 4)对于1GEO+3IGSO+1MEO组合,以不同的GEO卫星为参考星,逐颗增加GEO卫星,计算模糊度浮点解收敛至距真值±2周范围内所用历元个数,结果如表4所示。 5)采用本文选星方法从可见的8颗星中选取5星组合,所得卫星组为3,6,8,9,12;然后采用传统选星方法从8颗星中选取GDOP值最小的5星组合,以仰角最高的卫星为参考星,所得卫星组合为8,1,2,6,12。统计2种方法下模糊度浮点解收敛至距真值±2周范围内所用历元个数,结果如表5所示。 表2 五星组合模糊度收敛所用历元个数 表3 无GEO组合中逐颗增加GEO卫星模糊度收敛所用历元个数 表4 1GEO+3IGSO+1MEO组合中逐颗增加GEO卫星模糊度收敛所用历元个数 表5 2种方法效果比较 3.3 结果分析 从表2可以看出,在5星组合中,模糊度浮点解收敛用时长的卫星组合,或者不包含MEO卫星,或者组合中GEO卫星数多于2颗,说明MEO卫星的加入能够改善卫星的组合情况,有利于模糊度的求解;较多的GEO卫星会影响模糊度浮点解的求解速度,进而影响模糊度的快速求解。由表2可知,模糊度浮点解收敛最快的前16组卫星组合中均包含“6,8,12”和“8,9,12”的卫星组合,由图1可知,“6,8,12”和“8,9,12”卫星几乎都均匀分布于同一圆上,卫星方位角两两相差约120°,说明除参考星外,参与计算的非GEO卫星在方位角上均匀分布时,有利于模糊度的求解。 从表3可以看出,无GEO卫星的组合不一定能获得模糊度浮点解的快速收敛,在不改变参考星的前提下增加GEO卫星的颗数,能在一定程度上改善模糊度的收敛情况,有利于模糊度的求解;但增加的GEO卫星多于2颗时,对于模糊度浮点解快速求解的改善效果不再明显。 从表4可以看出,以GEO卫星为参考星,组合中的非参考星为方位平面上分布较好的非GEO卫星,能获得模糊度浮点解的快速收敛;在不改变参考星的前提下增加GEO卫星,对于模糊度浮点解的快速求解几乎没有改善,反而可能会影响其收敛速度。这是因为不同的GEO卫星之间相对位置几乎不变,在GEO卫星为参考星的前提下增加GEO卫星数量,对于双差方程观测矩阵的变化没有贡献。 由表1和表4可知,以仰角最高的GEO卫星PRN3为参考卫星,模糊度浮点解收敛速度最快。 由表5可知,采用本文方法选取卫星组合,模糊度浮点解收敛速度要快于采用传统方法选取的卫星组合。 本文结合当前北斗系统的区域性特点,在分析双差载波相位观测方程对模糊度浮点解求解影响的基础上,有针对性地提出了一种相对定位的选星方法:选取仰角最高的GEO卫星为参考星;在选取非参考星时,考虑仰角高于10°的MEO和IGSO卫星,并优先选取MEO卫星,然后选择IGSO卫星,且尽量保证所选MEO+IGSO卫星组合均匀分布在方位平面上。实测数据的结果证明了该方法的正确性和合理性,对于当前北斗区域导航乃至将来北斗全球系统阶段的相对定位选星方法具有一定的借鉴意义。 [1] 陈灿辉,张晓林.一种新的卫星导航系统快速选星方法[J].电子学报,2010,38(12):2887-2891. CHEN Canhui,ZHANG Xiaolin.A Fast Satellite Selection Approach for Satellite Navigation System[J].Acta Electronica Sinica,2010, 38(12):2887-2891. [2] IAN Sharp,KEGEN Yu,JAY Guo Y.GDOP Analysis for Positioning System Design[J].IEEE Transactions on Vehicular Technology,2009,58 (7):3371-3382.[3] 段宇鹏,魏宗康,刘建波.一种GPS最优选星及伪距定位方法[J].中国惯性技术学报,2013,21(2):209-213. DUAN Yupeng,WEI Zongkang,LIU Jianbo. Optimal Constellation Selecting and Pseudo-range Positioning Algorithm in GPS[J]. Journal of Chinese Inertial Technology,2013, 21(2): 209-213. [4] LI Guangyao,XU Chengdong,ZHANG Pengfei, et al.A Modified Satellite Selection Algorithm Based on Satellite Contribution for GDOP in GNSS[J].Lecture Notes in Electrical Engineering,2012,176(1):415-421. [5] 霍国平,缪玲娟,高志峰.基于 3 星子集的 GPS 快速选星算法[J].宇航学报,2014,35(5): 574-580. HUO Guoping,MIAO Ningjuan,GAO Zhifeng. GPS Fast Constellation Selection Based on 3-SAT Subset[J].Journal of Astronautics,2014, 35(5):574-580. [6] WEI Miaomiao,WANG Ju,LI Jiaqi.A New Satellite Selection Algorithm for Real-time Application[C]//IEEE.2012 International Conference on Systems and Informatics.New York:IEEE,2012: 2567-2570. [7] 吴瑞祥,蔡体菁.基于高度角和方位角的选星方法[J].舰船电子工程,2009,29(11):73-75. WU Ruixiang,CAI Tijing.An Satellites Selection Algorithm Based on Elevation and Azimuth[J].Ship Electronic Engineering,2009, 29(11):73-75. [8] 赵新,张建军,朱立东.北斗导航系统的快速选星算法研究[J].空间电子技术,2012(2):4-9. ZHAO Xin,ZHANG Jianjun,ZHU Lidong.The Fast Satellite Selection Algorithm for COMPASS[J].Space Electronic Technology, 2012(2):4-9. [9] 伍劭实,赵修斌,庞春雷,等.基于SVD-RLS的动对动整周模糊度解算方法[J].空军工程大学学报:自然科学版,2015,16(5):61-64. WU Shaoshi,ZHAO Xiubin,PANG Chunlei,et al.A Method for Kinematic-to-Kinematic Integer Ambiguity Resolution Based on SVD-RLS[J].Journal of Air Force Engineering University: Natural Science Edition,2015,16(5):61-64. [10] ZHANG Miaoyan,ZHANG Jun.A Fast Satellite Selection Algorithm:Beyond Four Satellites[J].IEEE Journal of Selected Topics in Signal Processing,2009,3(5):740-747. [11] 樊静.GPS弱信号的高灵敏度捕获算法[J].重庆邮电大学学报:自然科学版,2012,24(3): 326-329. FAN Jing.High-sensitive Acquisition of the GPS Weak Signal[J].Journal of Chongqing University of Posts and Telecommunications: Natural Science Edition,2012,24(3):326-329. [12] CHEN Yingmei,LI Zhiqun,WANG Zhigong,et al.Design of an L1 Band Low Noise Single-chip GPS Receiver in 0.18 μm CMOS Technology[J]. The Journal of China Universities of Posts and Telecommunications,2010,17(3):60-65. 伍劭实(1990-),男,湖北宜昌人,硕士研究生,主要研究方向为卫星导航与定位。E-mail: wushaoshipaper@163.com。 (编辑:王敏琦) Research on BDS satellite selection in high-precision relative positioning WU Shaoshi1,ZHAO Xiubin1,PANG Chunlei1,DUAN Rong1,LIU Yadong2 (1 .Information and Navigation College, Air Force Engineering University, Xi’an 710077, P.R.China; 2. PLA,No.95853 Troop,Beijing 100076, P.R.China) In BeiDou navigation satellite system(BDS), high-orbit satellites would cause a worse ill-conditioned problem to normal equation when compared to global positioning system(GPS). Firstly, the effects brought by coefficient matrix of double-differential carrier phase observation equation on calculating float solution of integer ambiguity is analyzed. On this basis, combining characteristics of the hybrid constellation of BDS, a high-precision regional BDS relative positioning satellite selection method is studied. In this method, the geostationary earth orbit (GEO) satellites with the highest elevation is selected as the reference satellite, then medium earth orbit (MEO) satellites with elevation higher than 10 degrees are selected preferentially, and inclined geosynchronous satellite orbit (IGSO) ones are selected according to uniform distribution principle. The experiments indicate that the proposed method is correct and reasonable. In high-precision regional BDS relative positioning, the proposed method would alleviate the ill-conditioned problem to some extent and bring float solution of the integer ambiguity into a relatively rapid convergence, which contributes to fast and correct fixation of integer ambiguity. BeiDou navigation satellite system(BDS); satellite selection; relative positioning; integer ambiguity 10.3979/j.issn.1673-825X.2016.06.010 2015-08-11 2016-05-31 庞春雷 chunleipcl@163.com 国家自然科学基金(61273049) Foundation Item:The National Natural Science Foundation of China(61273049) TN967.1 A 1673-825X(2016)06-0810-053 试验与分析




4 结束语