基于时域宽带矩阵滤波的实船螺旋桨噪声测试技术
2017-01-03张大海
张大海,魏 强
(中国舰船设计研究中心,武汉 430064)
基于时域宽带矩阵滤波的实船螺旋桨噪声测试技术
张大海,魏 强
(中国舰船设计研究中心,武汉 430064)
为了解决实船螺旋桨噪声测试分离难题,提出基于时域宽带矩阵空域滤波的实船螺旋桨噪声测试系统设计技术。通过分析舰船水下辐射噪声特性,将舰船等效为空间分布的多点辐射噪声源;结合水听器阵列空间滤波特性,设计能够满足宽频测试要求的水听器基阵测试系统;针对螺旋桨噪声分析需求,设计时域宽带矩阵空域滤波器组,抑制来自舰船其他部位声源干扰,实现实船航行状态螺旋桨部位噪声源有效时长的时域采样数据。仿真实例表明,所形成噪的声测试技术在信干比不小于-5.0 dB时,对螺旋桨噪声数据的时域宽带提取累计误差不大于2.0 dB。
矩阵滤波器,螺旋桨噪声,水听器阵列
螺旋桨噪声是舰船三大噪声源之一,准确获取实船螺旋桨噪声一直是困扰水面舰船螺旋桨声学优化设计的瓶颈。当前,舰船螺旋桨辐射噪声获取的方法包括:①应用噪声源分离方法从全船水下辐射噪声中分离机械噪声、水动力噪声后得到螺旋桨噪声[1],该方法不仅需要开展舰船推进器部位噪声专项试验,还需要配合获取机械噪声数据,水动力噪声数据,其中包括不同工况脱桨滑行测试等,过高的测试要求和全面的基础数据需求在一定层度上限制了该方法在舰船螺旋桨噪声分析方面的推广;②应用低噪声机械设备驱动螺旋桨试验,降低舰船机械噪声干扰影响,以获取螺旋桨噪声[2],该方法的难点是低噪声机械设备和桨驱动装置设计标准很难确定;③意大利学者研究提出利用声波束形成技术评估噪声源的能量和空间分布位置的方法[2],该方法主要是利用阵列信号处理技术,通过设计测试系统来实现噪声源定位测量,将噪声源数据获取难点转移到了测试系统与数据处理技术,可简化舰船噪声测试复杂度。也有研究通过分析舰船辐射噪声的体积目标特性,结合大量船舶噪声通过特性数据存在的时频谱特征,给出的舰船作为体积目标三亮点噪声辐射模型,明确了螺旋桨、机械噪声源具有明显空间隔离度[3-5]。基于宽带空间滤波技术的舰船噪声测试技术,是应用多水听器组成的线列阵所具备的空域滤波特性,结合水声阵列信号数据处理方法,解决沿艇体分布的舰船辐射噪声源空间分离问题。如聚焦波束形成、恒定束宽波束形成等技术[6],在国外舰船噪声特性分析中已有应用[7]。
时域宽带矩阵滤波器[8]具有获取一定空间内噪声源时域测试数据的能力,该技术可通过合理设计基阵测试系统,实现一定时间和空间内动态声源辐射噪声相对稳定数据采集,为噪声源特性分析提供无失真的原始数据。
已有的螺旋桨噪声获取方法,尽管也能分析出螺旋桨声特征,但需要借助大量的测试和后期数据处理,并且无法直接获得螺旋桨噪声时域数据,在一定程度上影响了螺旋桨噪声特性分析全面性。为此,考虑利用舰船噪声测试过程中反映出的体积声源沿船长多亮点分布特点,结合时域宽带矩阵滤波器的时、空域所特有的滤波特性。通过合理设计舰艇水声测试系统、设计对应螺旋桨噪声主要频带的时域宽带矩阵滤波器,并且采用选择性开启舰载声源设备,保证机械与螺旋桨噪声源之间的空间隔离度等措施,形成舰船螺旋桨噪声测试新技术,有效解决螺旋桨噪声测试难题。
1 舰船螺旋桨直发声可测试性分析
1.1 主要声源空间隔离测试可行性
舰船巡航状态,影响其水下辐射噪声的因素主要为机械噪声与螺旋桨噪声,对于一艘船长超过80 m的舰艇,选择开启机舱前部机械声源设备时,可以实现螺旋桨与机械噪声源之间空间隔离度大于50 m。如图1所示,假设测量基阵布置在距离船航行路线约150 m位置,2种主要噪声源在测量基阵形成夹角α+β≈20°,根据多元线列阵波束形成原理,对于阵元间距4 m的20元线列阵,大于150 Hz低频信号对应的-3 dB波束宽度在为3.2°,对应2 kHz信号的-3 dB波束宽度为0.23°,远小于2主要声源空间夹角。因此通过多波束系统设计空域滤波器方式,是可以实现噪声源的空间隔离的。
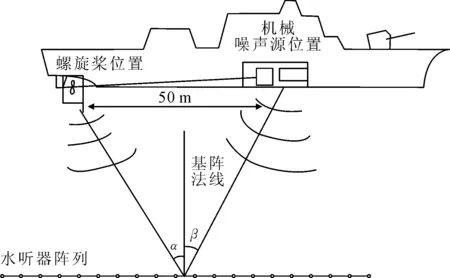
图1 舰船2大噪声源所具有的空间隔离度示意
1.2 螺旋桨稳态噪声数据采集可行性
舰船航行中,一定采样时间内为了获得持续稳定螺旋桨噪声数据,需要测试系统能够稳定跟踪螺旋桨声源,并且不受螺旋桨声源空间指向性影响。假设舰船以10 m/s速度前进,稳定采样时间为3 s,如图2所示,需要设计测试系统满足θ≥12°的宽频恒定空间滤波能力。根据线列阵时域宽带矩阵滤波器设计技术,满足阵元间距大于半波长的20元线阵列,可设计得到具有一倍频程宽带空间滤波特性且θ≥12°的矩阵滤波器。鉴于此,通过稀疏阵列测试系统设计,获得多个倍频程带宽内稳定螺旋桨噪声原始数据是可行的。
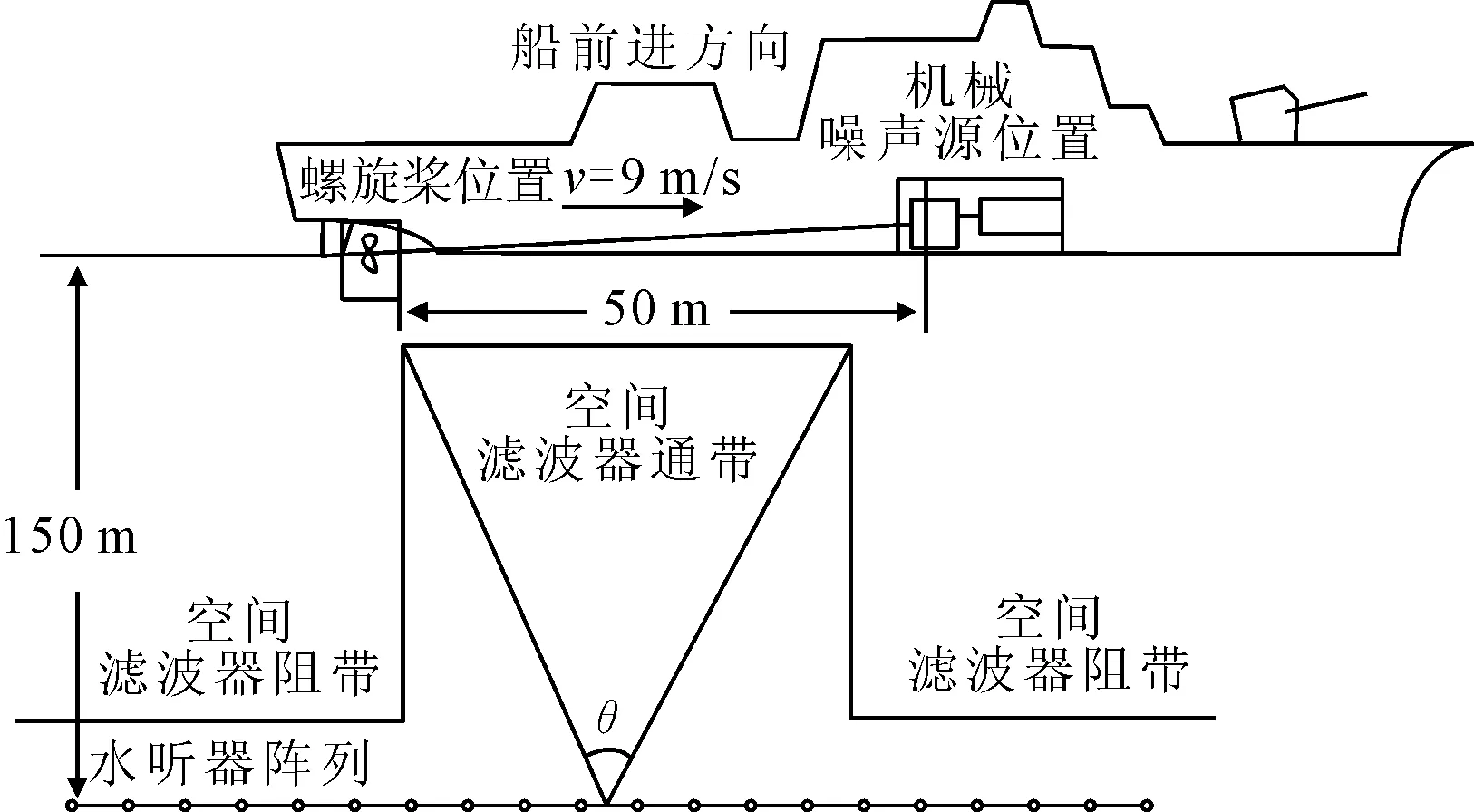
图2 获取一定采样时长稳定螺旋桨 噪声数据的空域滤波需求示意
2 时域宽带矩阵空域滤波器设计原理
假设水声阵列阵元数为N,设计时域滤波器阶数为M,各阵元输出数据的时刻为t0,以1#阵元为例,输出数据为x11=x1(t0),经过m倍采样间隔延迟后为x1m=x1(t0-(m-1)Ts)。写成数字信号的形式。
x11(l)=x1(l),x1m(l)=x1(l-m+1)
(1)
式中:l为时间序数。
将各阵元输出的数据写成矩阵的形式(省略时间序数l)为
x1=[x11x21…xN1]T
(2)
经过m倍采样间隔延迟后的阵列数据为
xm=[x1mx2m…xNm]T,
m=1,2,…,M
(3)
如果将阵元输出数据以及各延迟数据组合在一起,定义矩阵

(4)
这是一个NM×1的列向量。
同样,将对应于m倍采样间隔延迟后的加权系数写成矩阵的形式。
如果将加权系数组合在一起,定义三维矩阵
(6)
则时域宽带空域滤波输出可以写成
y(l)=hTx(l)
(7)
图3是基于FIR滤波器的时域空域矩阵滤波的实现结构图。由图3可见,其中要设计N×N个FIR滤波器,每个阵元输出都与N个FIR滤波器对应,之后,再将这N×N个FIR滤波器的输出进行重新组合,获得与N个阵元相对应的输出。
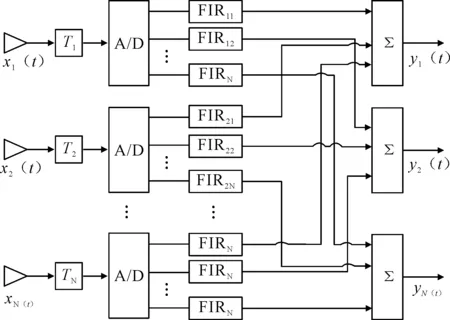
图3 时域宽带空域矩阵滤波的实现结构图
3 设计实例
3.1 测试系统设计
在满足舰船体积声源多源特性距离条件下,设计测量基阵系统与被测舰船横向间距150 m,对应每倍频程带宽的均匀线列阵阵元数为20,所设计通带为基阵法向为中心12°的矩阵空间,阻带为18°空间,测试频带为螺旋桨噪声能量较为集中的150~4 000 Hz频段。
根据时域宽带矩阵空域滤波器设计能力,即依据1/2波长设置的水听器基阵,可实现对应频率和向上倍频程数据的时域宽带矩阵空域滤波。需要将对应频段进一步按倍频程关系分解为144~286,286~608,608~1 256,1 256~2 080,2 144~4 096 Hz 5个子频段,对应设计满足不同子频段的水听器阵列,为了实现5个子频段同步测量。设计总长76 m、阵元总数为60的水听器阵列如图4所示,阵元间距分为4、2、1、0.5和0.25 m 5档对称布置,以保证不同子频段水听器阵元数和空域分辨能力的一致性。

图4 设计满足5子带宽频信号处理用水听器线列阵
3.2 时空域矩阵滤波器设计
以对应阵元间距为0.5 m的20元线列阵构成的测试子单元为例,应用前述时域宽带矩阵空域滤波器设计原理和文献[8]中给出的设计方法,设计得到1 256~2 080 Hz频段时域宽带矩阵滤波器,其空间滤波特性如图5~6所示。可以看出,设计得到的时域宽带矩阵空域滤波器可实现通带空间12°和阻带空间18°要求,通带波动度≤0.3 dB,阻带衰减>10.0 dB的空间滤波特性。
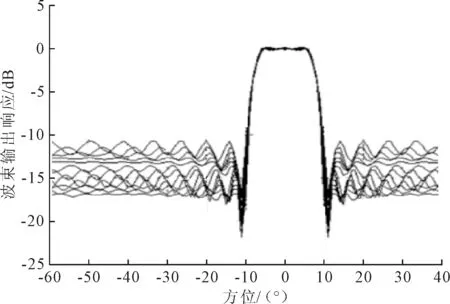
图5 TDBSF方向滤波特性
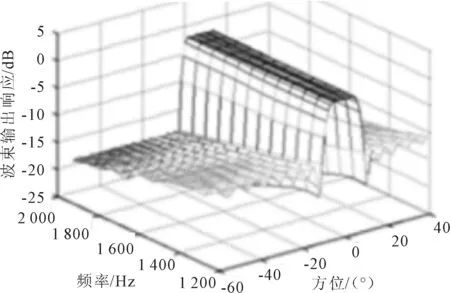
图6 TDBSF频率-方位滤波特性
3.3 推进器噪声获取仿真实例
为了真实模拟舰船通过测量区域时所提出的测量技术有效性,以3.1给出的测试系统与舰船空间关系,假设相对测量基阵舰船机械噪声源集中部位与螺旋桨部位之间夹角为20°,螺旋桨进入测量系统稳定采集时间从法线左侧6°开始,到法线右侧6°结束,机械噪声干扰始终保持与被测声源夹角。同3.2,为体现子频段内测量系统宽频信号处理能力,螺旋桨声源采用设计的1 200~2 000 Hz宽频谐波信号模拟,时间序列如图7所示,信号位置以2°间隔逐次分布于水听器基阵法线方向夹角-6°~+6°之间,应用随机噪声模拟舰船机械噪声,时间序列如图8所示,信号保持与模拟螺旋桨声源夹角不变,设置信干比为0 dB。图9为对应模拟信号源位于2°方向时,2#水听器接收到的未经空域滤波舰船辐射噪声的时间序列,可以看出,模拟螺旋桨信号完全淹没干扰辐射噪声中。
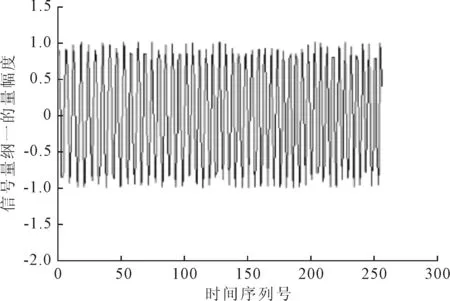
图7 设计的宽频谐波信号时间序列
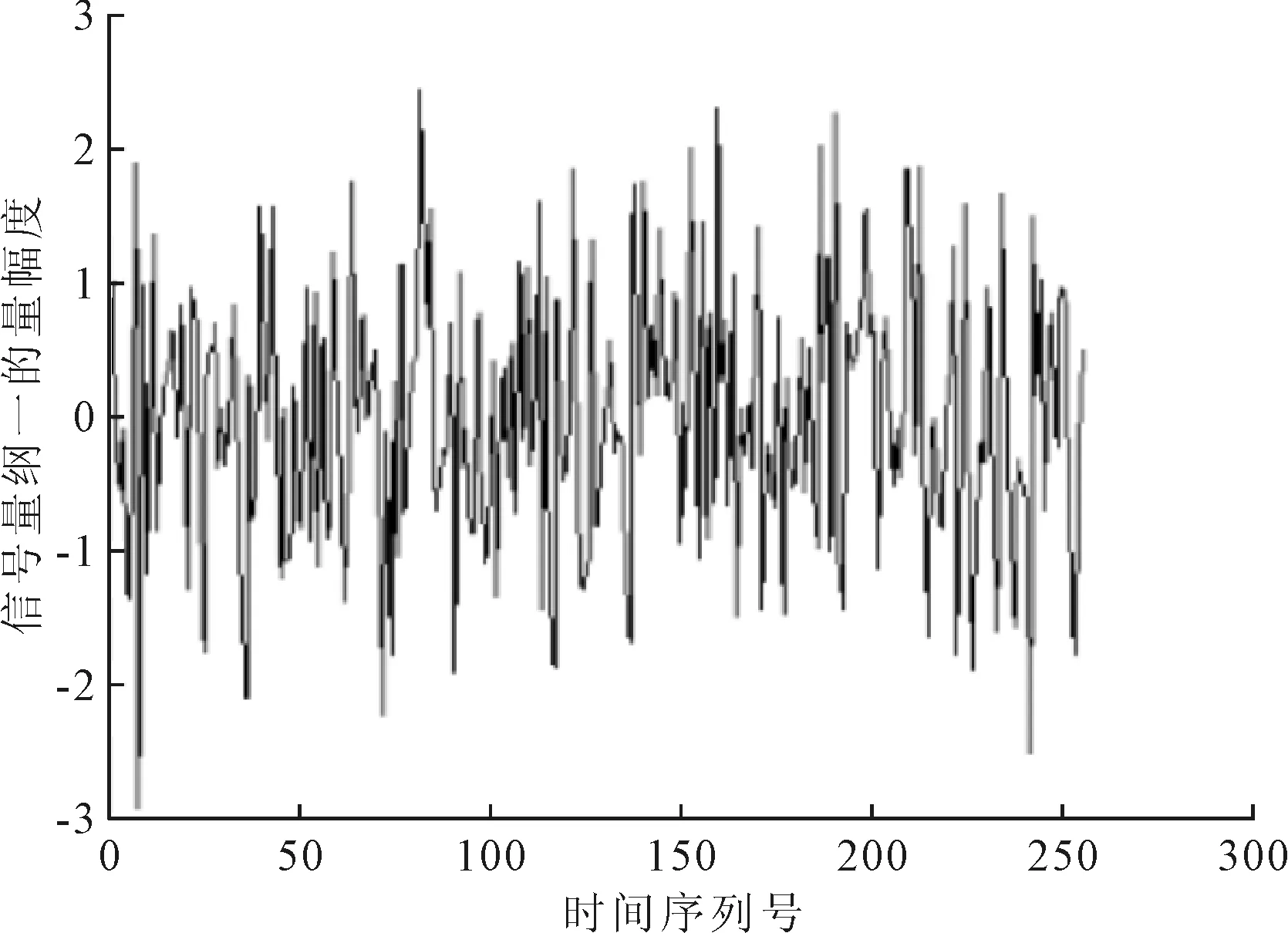
图8 随机噪声信号时间序列

图9 2#水听器接收的未经滤波信号时间序列
为了验证本论文设计测试系统中滤波器带内波动对真实信号影响,无干扰信号条件下,利用3.2设计时空域矩阵滤波器,测试系统2#水听器接收到信号经滤波后的时间序列与原始信号时间序列对比见图10。可以看出,受滤波器时延和通带波动影响,测试系统输出信号相比源信号时间序列存在30多个时延序列差异,其余部分时间序列波形具有较好的一致性。通带内声源运动到不同方位角时经测试系统输出有效信号时间序列与源信号对应时间序列相比的平均失真度见图11。可以看出,在通带范围内失真度小于1.1 dB(失真度计算见式(8)),证明了本测试系统在一定采样时间内稳定获取被测声源信号的能力。

(8)
结合舰艇实际螺旋桨噪声与机械噪声之间存在的信噪比不同,通过改变模拟信号源于干扰噪声源的信干比,得到了信干比从5.0~-5.0 dB范围内的信号时间序列对比图(见图12)和相比无干条件下测得信号的平均失真度曲线(见图13),可以看出,在机械噪声相比螺旋桨噪声高出5.0 dB的情况下,本测试系统所测得螺旋桨噪声信号的平均失真不大于2.0 dB。由此可以判断,本文所设计螺旋桨噪声测试系统可以实现对舰船螺旋桨部位辐射噪声的时域提取。
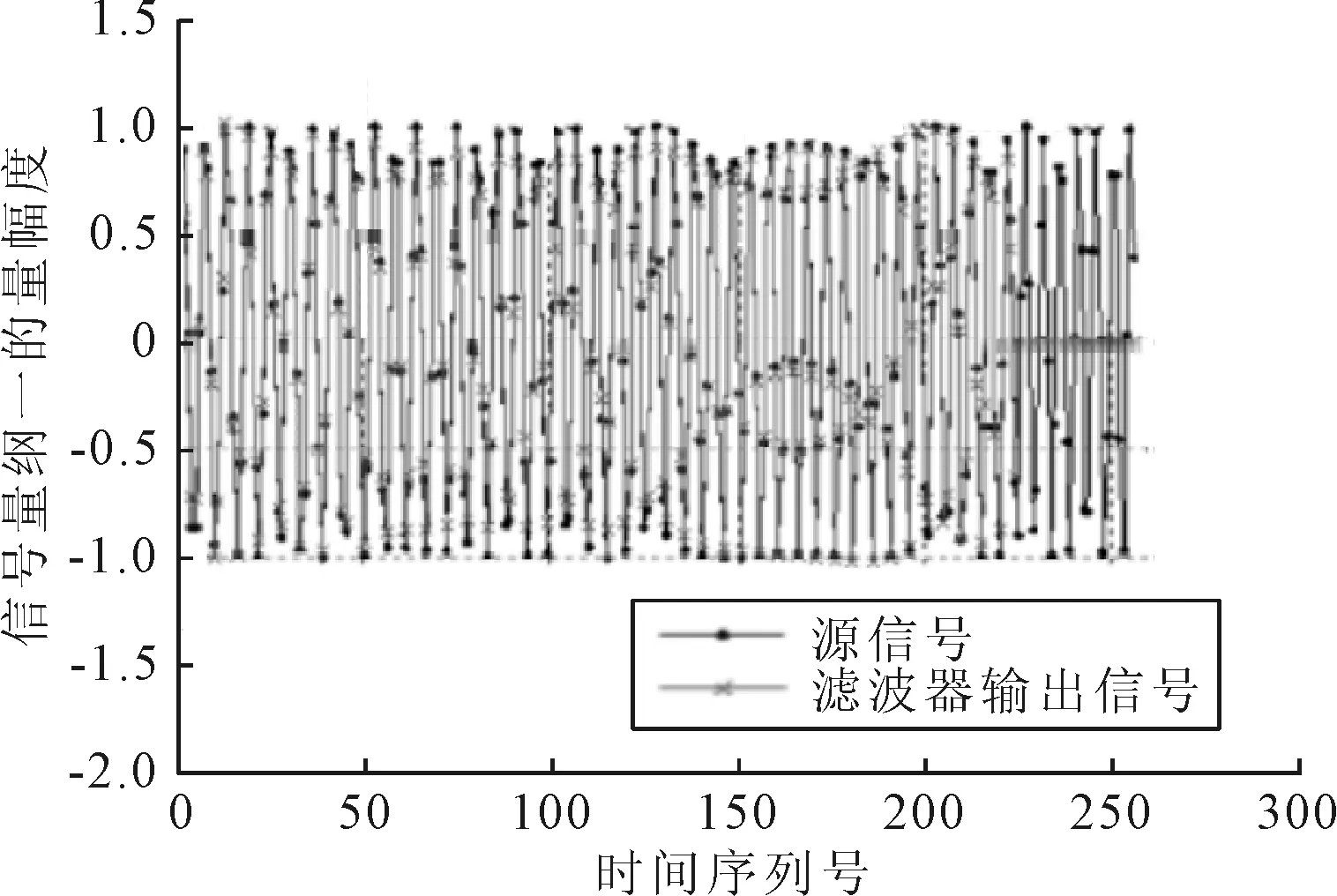
图10 无干扰条件下,测试系统2#水听器滤波 输出信号与源信号时间序号对比
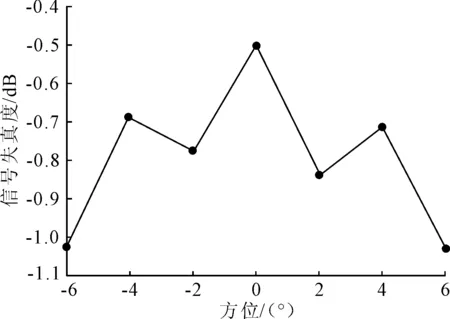
图11 源信号运动至通带内不同方位角时,滤波后 得到2#水听器接收信号时间序列失真度
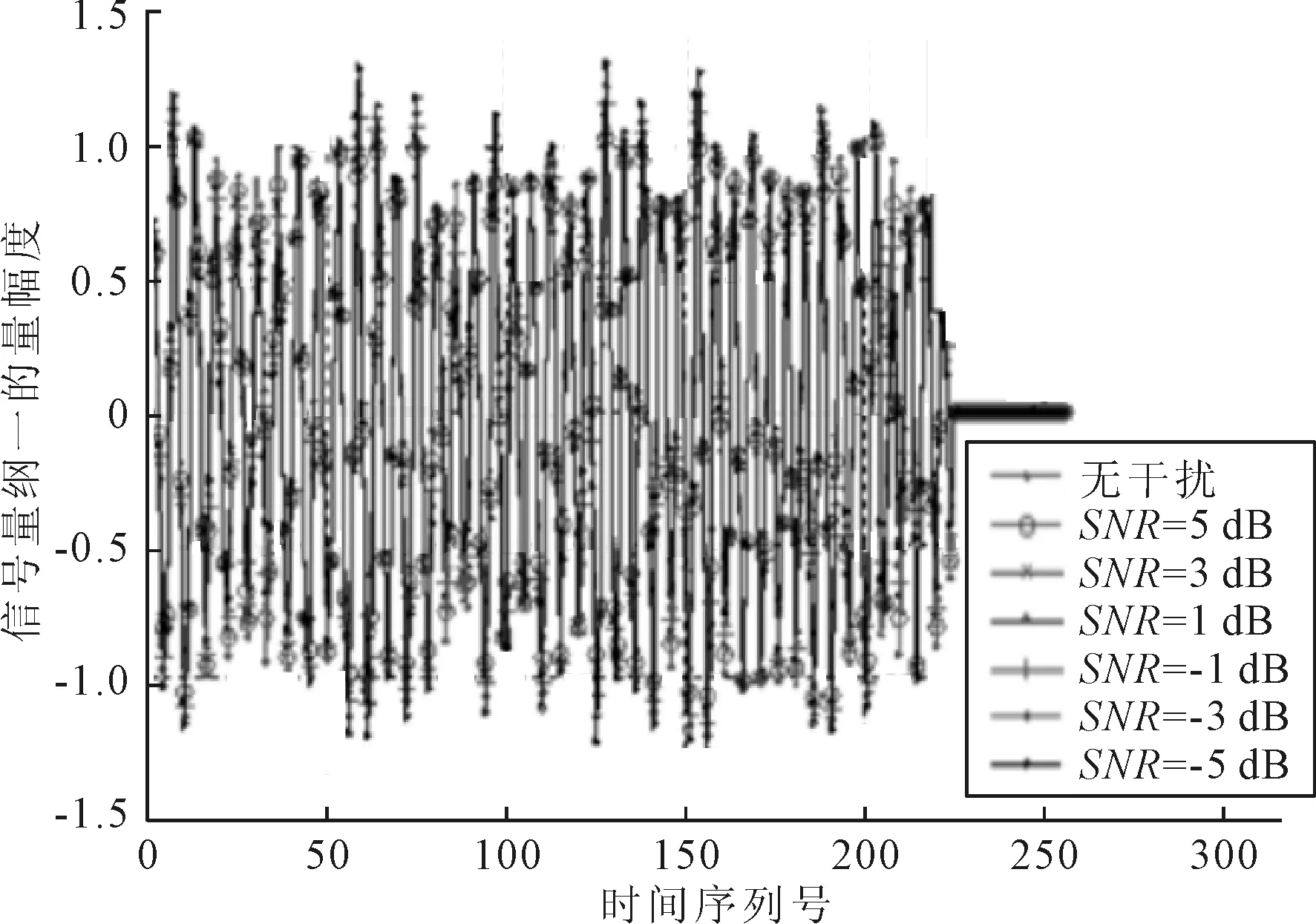
图12 无干扰条件和信干比从5.0~-5.0 dB 范围内的信号时间序列对比
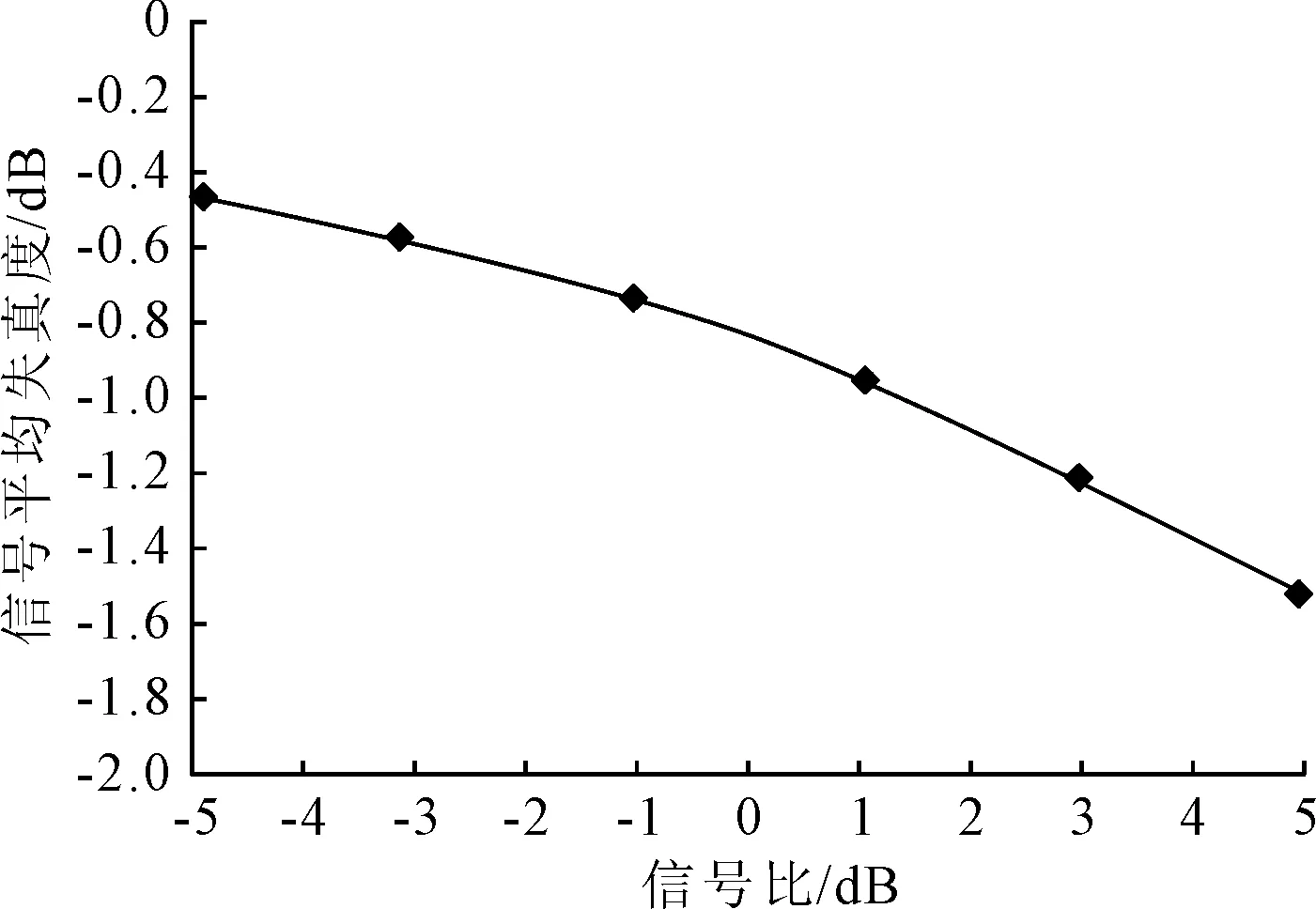
图13 不同信干比条件下,滤波后得到2#水听器接收信号时间序列失真度
4 结论及下一步工作建议
1)实现150~4 000 Hz频段范围内螺旋桨噪声测试需要60元水听器构成的稀疏阵列,基阵尺度需要76 m。
2)所设计测试系统可实现带外10.0 dB干扰抑制空间滤波能力,同带信号波动度小于0.3 dB。
3)所设计测试系统在信干比-5.0 dB条件下滤波得到信号时间序列,相比无干扰条件信号时间序列平均失真度为1.6 dB,能够保证现通带内信号提取。
4)信号源处于通带内不同位置时,所设计测试系统滤波前后原信号时间序列的平均失真度不大于1.1 dB,可保证一定采样时间内被测声源信号的稳定性。
5)本文提出的测试系统设计技术的空间滤波器是通过程序设计实现的,还需要靠获取基阵测试数据后进行处理。下一步工作考虑通过将滤波器参数植入高速计算芯片,实现测试系统对基阵测试数据的实时获取能力。
[1] 王志伟.舰船推进器噪声分离方法研究[D].哈尔滨工程大学,2012.
[2] PAOLO Castellini, MILENA Martarelli. Acoustic beamforming: Analysis of uncertainty and metrological performances[J]. Mechanical systems and signal processing,2008,22:672-692.
[3] 周有,韩鹏,相敬林.舰船作为体积目标时噪声通过特性的仿真[J].探测与控制学报,2005,27(2):61-64.
[4] 相敬林,刘勋.舰船做为体积声源的源强度谱纵向分布特性[J].探测与控制学报,2002,24(2):5-9.
[5] 韩鹏,张效民,相敬林,频带能量检测在舰船声源部位探测中的应用研究[J].西北工业大学学报,2006,27(2):397-400.
[6] 张大海,杨坤德.基于协方差矩阵加权的任意阵列宽带恒定束宽波束形成方法[J].声学技术,2008,27(3):439-445.
[7] 邱卫海,刘文帅.国外舰船噪声测试技术[J].舰船科学技术,2011,33(4):147-150.
[8] 张大海.时域宽带矩阵滤波器设计方法[J].系统仿真学报,2009,19(21):6170-6173.
Measure Technique for Ship-propeller-noise Based on Time Domain Broadband Spatial Matrix Filter
ZHANG Da-hai, WEI Qiang
(China Ship Design and Research Center, Wuhan 430064, China)
In order to solve warship propeller noise measuring problem, the measure technique for ship-propeller-noise by designing of time domain broadband spatial matrix filter (TDBSF) was provided. The main technical points of this technique include supposing warship as several point noise sources, using space filtering function of sonar array design broadband frequency hydrophone array, designing time domain broadband spatial matrix filter according propeller noise testing requirement. To verify availability of the measure technique, broadband frequency hydrophone array and matrix filter were designed. Simulation result showed that the proposed measure technique can get out propeller noise signal from ship radiating noise in condition of SNR≥-5.0 dB, and the accumulated error is not greater than 2.0 dB.
matrix filter; propeller noise; hydrophone array
10.3963/j.issn.1671-7953.2016.06.005
2016-02-21
张大海(1979—),男,博士,工程师
U664.33
A
1671-7953(2016)06-0020-05
修回日期:2016-04-02
研究方向:水面舰船综合隐身
E-mail:21128105@qq.com
