基于分阶段非线性融合的粒子滤波预测算法
2016-12-30张马兰
张马兰
(中航飞机股份有限公司研发中心 西安 710089)
基于分阶段非线性融合的粒子滤波预测算法
张马兰
(中航飞机股份有限公司研发中心 西安 710089)
针对航空发动机剩余寿命预测问题,采用多参数分阶段非线性的融合方法计算了发动机性能指标,结合粒子滤波思想建立了发动机性能衰退模型,借助粒子滤波预测估计了模型的时变参数,有效预测了发动机的剩余寿命,有利于航空发动机剩余寿命预测方法的研究.
航空发动机;融合;粒子滤波;剩余寿命预测
0 引 言
航空发动机是飞机的“心脏”,直接决定了民航运输的安全及效益.综合考虑新一代航空运输系统面临的“安全关口前移”与“运营成本控制”的双重标准,以及发动机不能进行周期长且成本高的反复试验的条件限制.准确地对航空发动机的剩余寿命(residual life,RUL)进行预测成为保证民航安全与效益中亟待解决的问题.
目前,发动机剩余寿命预测多采用基于融合的预测方法,但是缺乏对发动机性能衰退的阶段性特点的考虑;另外,Kalman滤波预测算法在发动机剩余寿命预测中应用较为普遍,但其较擅长解决线性和弱非线性问题,而发动机是极其复杂的系统,是强非线性问题.因此,考虑发动机性能衰退分阶段的特点及表征参数与性能的非线性映射关系描述其性能衰退趋势,并采用非线性的预测方法对性能衰退趋势进行预测极为重要.
1 发动机性能衰退
航空发动机的健康状况无法直接观测,但随着运行时间的增加,其性能衰退会反映在监测参数的变化上.这些参数包括气路性能参数、滑油参数和振动参数.气路性能状态对整个发动机的性能衰退情况起主导作用.因此,将气路性能参数中的多个监测参数作为研究对象,表征发动机健康状态.
文中将气路性能参数中的8个表征参数[1]作为衡量发动机健康状况的决定参数.这8个参数为:低压压缩机出口总温(T24);高压压缩机出口总温(T30);排气温度(T50);风扇出口总压(P15);高压压缩机出口总压(P30);低压转子转速(Nf);高压转子转速(Nc);燃油流量比(phi).这些参数主要是温度、压力、转速、流量相关的参数,在发动机性能出现衰退时,往往呈现较为明显的变化,如温度上升、压力下降、转速加快、流量降低.
1.1 性能衰退趋势分析
以NASA发布的一组数据为例[2],研究发动机性能衰退的阶段性特点,各个参数检测序列见图1.
图1中各个监测参数的监测值随时间变化的规律都表明,在某一点前,数值变化慢,而达到一定值之后,数值变化增快,预示着发动机在短期内将出现失效的情况.监测参数是发动机健康状况的表征.因此,发动机性能衰退趋势具有与各个监测参数类似的变化特点——阶段性衰退特征.

图1 气路监测参数的监测序列
1.2 监测参数的阶段划分方法
对监测参数进行阶段划分是突变检测的过程,对于非平稳非线性的监测序列进行突变检测时,采用启发式分割算法[3-4].算法描述如下.
SD=
(1)
(2)
式中:N1,N2分别为i点前半部分与后半部分的点的总数;u1(i),u2(i)分别为i点前半部分与后半部分的均值;S1(i),S2(i)分别为i点前半部分与后半部分的标准偏差;SD(i)为合并偏差;T(i)为检验统计值.
该算法是将非平稳时间序列每个点的左右两部分进行比较,计算T(i),T(i)值最大时,表明该点的左右2部分的分布函数的参数具有较大差异.最大T(i)对应的i点即为该非平稳时间序列的突变点.参数在不同时间窗内具有不同的变化率可准确描述发动机性能衰退的阶段性特性.
2 分阶段非线性融合
从航空发动机结构的复杂性考虑,线性融合不能反映出各个监测参数与发动机健康指标(health index,HI)之间非线性的映射关系.为解决该问题,提出了分阶段非线性融合的方法.分阶段非线性融合是指:采用分阶段的处理方式进行多参数的融合,融合模型采用非线性模型组.分阶段非线性融合模型组描述为
(3)

(4)
式中:Xk1为前5个循环时的HI为1对应的性能参数监测值样本;XkB1为第1个突变点附近5个循环时HI为kB1对应的性能参数监测值样本;XkBn为第n个突变点附近5个循环时HI为k对应的性能参数监测值样本;Xk0为后5个循环时HI为0对应的性能参数监测值样本;k1=[1,1,1,1,1]T;kAn=(1-mAn)I;k0=[0,0,0,0,0]T.

3 发动机性能衰退预测
3.1 性能衰退建模
多项式函数具有逼近任意非线性函数的能力,文中采用以下衰退模型对航空发动机进行性能衰退建模
(5)

将航空发动机的性能衰退模型式(5)离散化,建立状态空间模型[6-7]如下.
(6)

3.2 粒子滤波估计时变参数
粒子滤波算法[8]中,首先对样本进行采样获得粒子,然后计算这些例子的权值,根据权值大小决定留下哪些粒子删除哪些粒子,最后根据留下的粒子来逼近后验概率分布,如果留下的粒子不符合要求则对这些带权值的粒子进行第二次采样,如此循环直到完成当前状态的估计.
采用粒子滤波算法更新时变参数的计算过程:


3.3 发动机剩余寿命预测步骤
基于分阶段非线性融合的粒子滤波预测发动机剩余寿命的算法步骤:
步骤1 分别对多个监测参数进行突变点检测,计算各个监测参数监测值的退化比例,得到平均突变点及突变点处的退化比例.
步骤2 以突变点对各个监测参数进行阶段划分,结合退化比例,利用训练样本集训练与样本数据对非线性融合模型进行训练,得到不同时间窗内的融合模型系数.
步骤3 结合各个参数在全寿命周期的观测值,利用非线性融合模型,融合得到发动机全寿命周期的HI序列.
步骤4 将由观测值融合得到的全寿命周期健康指数序列引入到性能衰退模型中,结合粒子滤波估计以及一般拟合方法,对全寿命周期的健康指数进行最佳拟合,以确定性能衰退模型的非时变参数.
步骤5 结合各个监测参数在运行中的参数观测值,采用非线性融合模型对多个监测参数进行融合,融合得到运行中发动机的HI序列.
步骤6 将由观测值融合得到的运行中HI引入性能衰退模型中,采用粒子滤波估计其时变参数.将时变参数与第四步中的非时变参数代入性能衰退模型中,预测发动机失效时间,最终计算剩余寿命.
4 预测示例与算法比较
示例数据来自NASA发布的C-MAPSS的100台发动机性能衰退数据.每台发动机都有3个数据集:训练集、测试集、实际RUL集.
4.1 分阶段非线性融合的粒子滤波预测示例
设置粒子数为1 000,粒子的初始权值为1/1 000.选择编号17的发动机作为预测对象.模型参数初始值分别为
步骤1 采用式(1)~(2)分别对8个参数的监测序列进行突变点检测,计算突变点平均位置为218飞行循环时,对应的HI值为0.654 5.
步骤2 利用式(3)训练模型系数.发动机的前5个循环时的健康指数设为1,突变点前后的5个循环时的健康指数为0.654 5,最后5个循环时的健康指数设为0,根据式(4)确定训练样本集:
-0.000 01,-0.000 1,0.000 6,0.000 4,
-0.000 1,-0.003 3,-0.001 4,-55.252 9)
-0.000 1,-0.000 01,0.001 1,-0.000 01,
-0.000 1,-0.003 5,-0.000 3,-66.184 1)
步骤3 结合分段的非线性融合模型与模型系数,利用式(3)融合8个监测参数的监测数值,得到发动机基于分阶段非线性融合的HI,见图2.
步骤4 将状态空间方法与粒子滤波算法相结合,进行最佳拟合.预测值(曲线①)及实际值(曲线②)见图3.

图2 分阶段非线性融合的HI
根据发动机健康指数的最佳拟合结果,拟合误差均值为0.042 3,确定退化方程为
步骤5 利用分阶段非线性的模型系数融合得到运行中发动机的HI序列,计算结果见图4.
步骤6 将健康指数序列作为粒子滤波算法的输入量估计模型未来时刻的时变参数.对未来时刻的健康指数进行预测,最终得到发动机失效时间,见图5.
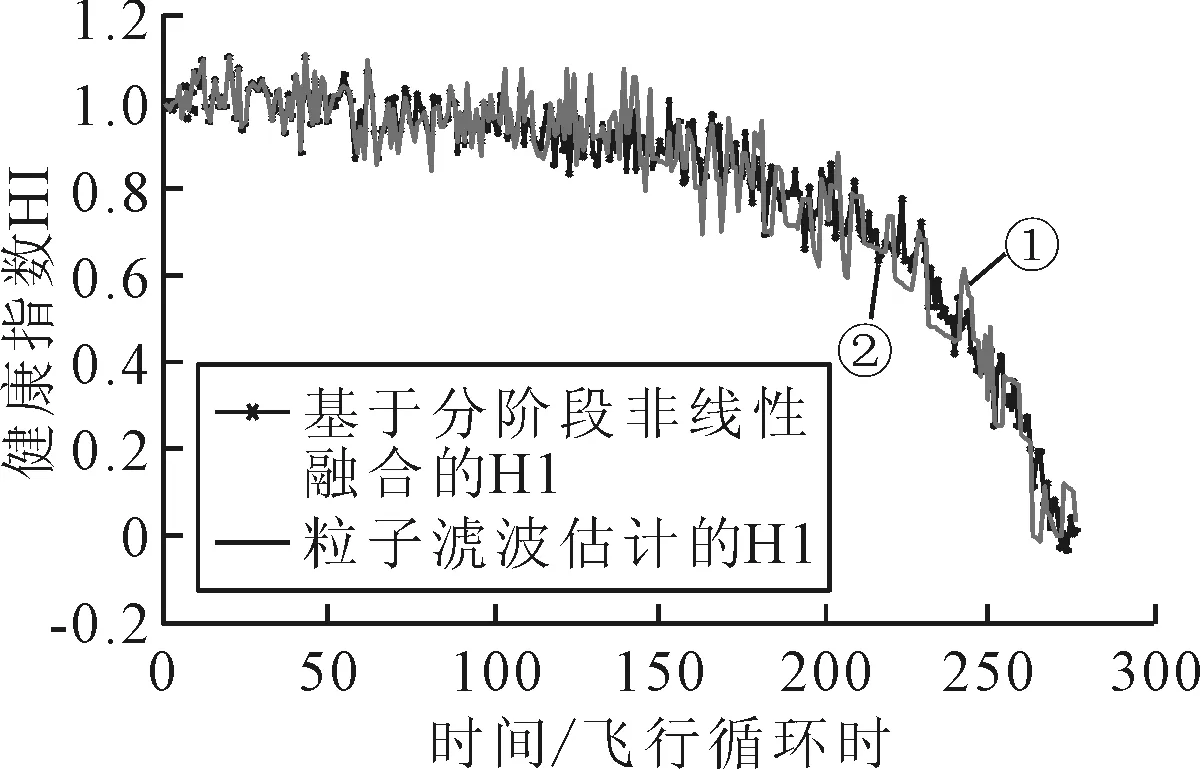
图3 粒子滤波最佳拟合
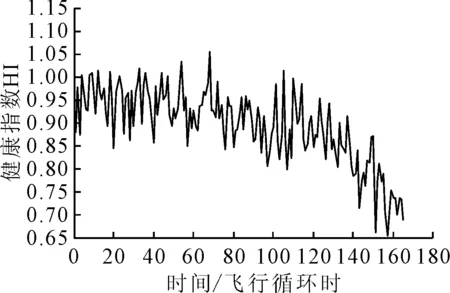
图4 运行中发动机的HI序列
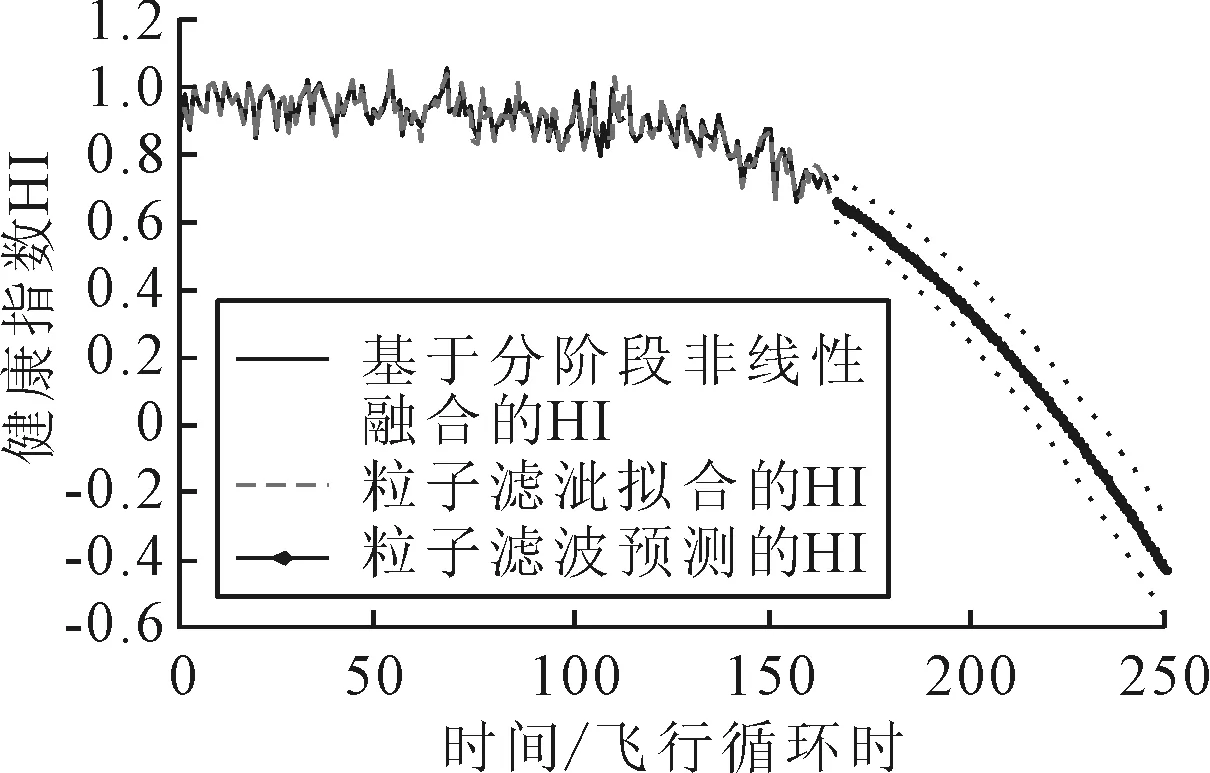
图5 发动机剩余寿命预测
结果显示,编号17的发动机的RUL为56.RUL数据集显示,编号17的发动机的实际RUL为59,预测误差为3.
4.2 算法比较
1) 拟合误差 对编号17的发动机采用基于单阶段线性融合的Kalman滤波预测、基于分阶段非线性融合的粒子滤波预测发动机剩余寿命,拟合误差结果见表1.

表1 拟合误差比较
由表1可知,基于分阶段非线性融合的粒子滤波预测在拟合过程中产生的拟合误差均值较小.
2) 预测误差 对编号17的发动机采用基于单阶段线性融合的粒子滤波预测,基于分阶段线性融合的粒子滤波预测与基于分阶段非线性融合的粒子滤波预测估计RUL,预测误差见表2.
表2中,MAPE(平均绝对百分误差)计算公式如下.

表2 预测误差比较
(7)
式中:Yactual为实际的剩余使用寿命;Ypredicted为预测的剩余使用寿命.MAPE越小说明预测的结果越精确.表2表明,基于分阶段非线性融合的粒子滤波预测具有较高的预测精度.
3) 预测演化过程 预测演化过程是在不同的剩余寿命阶段预测RUL.基于单阶段线性融合的Kalman滤波预测与基于分阶段非线性融合的粒子滤波预测的预测演化过程见图6.
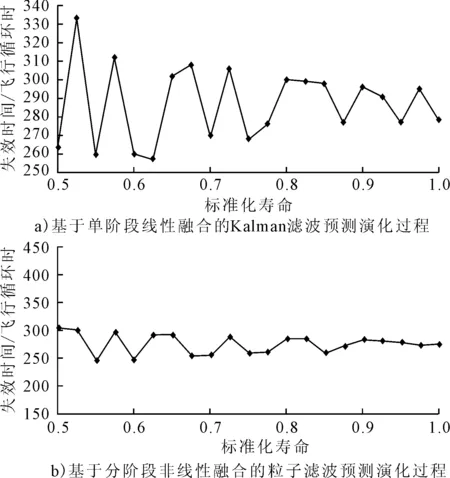
图6 预测演化过程对比
标准化寿命的计算公式
LS=NM/LT
(8)
式中:LS为标准化寿命;NM为观测值个数;LT为总体寿命.
随着监测数据的引入,拟合条件越来越充分,预测的结果也越来越逼近真实值,但二者的预测演化过程存在很大差异.基于分阶段非线性融合的粒子滤波预测演化过程的波动性更小,性能衰退后期逼近真实RUL的速度较快.
综上所述,基于分阶段非线性融合的粒子滤波预测方法具有拟合误差小、预测精度高以及预测演化过程优的特点,因此,优于基于单阶段线性融合的Kalman滤波预测.
5 结 论
1) 分阶段的处理方式考虑了发动机的性能衰退过程的阶段化特征.
2) 非线性融合的方法考虑了各个监测参数与发动机健康水平(HI)间的非线性映射关系.
3) 粒子滤波预测不以线性假设为前提,更符合发动机复杂系统的实际情况.
因此,基于分阶段非线性融合的粒子滤波预测算法能够提高发动机剩余寿命的预测精度.
[1]LIU K, GEBRAEEL N Z, SHI J. A data-level fusion model for developing composite health indices for degradation modeling and prognostic analysis[J].IEEE Transactions on Automation Science and Engineering,2013,10(3):652-664.
[2]SAXENA A, GOEBEL K. Turbofan engine degradation simulation data set[EB/OL].[2013-09-12]http://ti.arc.nasa.gov/project/prognostic-data-repository.
[3]BECK C, COHEN E G D. Superstatistics[J]. Physica A: Statistical Mechanics and Its Applications,2003,322:267-275.
[4]杨越,胡汉平,熊伟,等.一种基于超统计理论的非平稳时间序列异常点检测方法研究[J].计算机科学,2011,38(6):93-95.
[5]LIU J Q, ZHANG M L, ZUO H F, et al. Remaining useful life prognostics for aeroenginebased on superstatistics and information fusion[J]. Chinese Journal of Aeronautics,2014,27(5):1086-1096.
[6]任淑红.民航发动机性能可靠性评估与在翼寿命预测方法研究[D].南京:南京航空航天大学,2010.
[7]王华伟,吴海桥.基于信息融合的航空发动机剩余寿命预测[J].航空动力学报,2012,27(12):2749-2755.
[8]ZIO E, PELONI G. Particle filtering prognostic estimation of the remaining useful life of nonlinear components[J]. Reliability Engineering & System Safety,2011,96(3):403-409.
Particle Filter Prognostics Algorithm Based on Multi-phase and Non-linear Fusion
ZHANG Malan
(AVICAircraftResearchandDevelopmentCenter,Xi’an710089,China)
A fusion technique taking into account the multi-phase and non-linear characteristics of the aero-engine degradation is adopted to calculate the health level of the aero-engine. A performance model is established based on the thoughts of particle filter and the time-varying parameters of the model are estimated by particle filter algorithm. In addition, the remaining useful life of aero-engine is effectively predicted, which may attribute to the research of remaining useful life prognostics for aero-engine.
aero-engine; fusion; particle filter; remaining useful life prognostics
2016-10-03
V23
10.3963/j.issn.2095-3844.2016.06.032
张马兰(1990—):女,硕士,主要研究领域为航空发动机预测与健康管理
