考虑降雨影响的全速度差跟驰模型及标定*
2016-12-30叶小群韩高峰
颜 冉 叶小群 韩高峰
(安徽建筑大学建筑与规划学院1) 合肥 230022) (安徽省交通规划设计研究总院股份有限公司2) 合肥 230088)
考虑降雨影响的全速度差跟驰模型及标定*
颜 冉1)叶小群1)韩高峰2)
(安徽建筑大学建筑与规划学院1)合肥 230022) (安徽省交通规划设计研究总院股份有限公司2)合肥 230088)
在分析降雨对交通流影响的基础上,通过驾驶员反应延迟时间参数和路面附着系数参数量化分析了降雨对车辆跟驰行为的影响,并通过安全距离模型将两影响参数嵌入到全速度差模型中,结合全速度差模型建立了考虑降雨影响的全速度差跟驰模型.利用I880N实际数据对模型进行了标定,且对标定结果进行误差分析.结果表明,降雨主要影响车辆的优化速度和车辆之间的安全距离,对车辆间速度差的影响很小.
降雨;反应延迟时间;附着系数;跟驰模型;标定
0 引 言
降雨等恶劣天气会对交通流产生影响,宏观层面上表现为交通流速度、流量等特性的变化;微观层面上表现为车辆跟驰和换道特性的变化[1].跟驰模型作为很重要的一种交通流微观模型,可以解释许多微观交通流现象,进一步反映交通流的本质.有关跟驰模型建立的研究有很多[2],但涉及跟驰模型标定的较少,Arne等[3]利用车辆运行轨迹数据通过遗传算法对非线性目标进行优化求解模型参数.王殿海等[4]利用实测数据对GM模型进行了标定.姜军等[5]利用实车实验获得的数据对Helly模型进行了标定.比较经典的跟驰模型,如GM模型、Newell模型、Helly模型、Gipps模型、OV模型以及FVD模型[6]等均在正常天气条件下建立和参数标定的,而降雨等影响交通流的天气因素并未在模型中得以体现,其标定出来的参数也就没有考虑到降雨等天气因素对车辆跟驰的影响,这就导致了模型标定的结果并不能很好地反应降雨等非正常天气下的交通流特性.现有的国内外有关降雨影响下的跟驰模型及其参数标定研究比较少,龚节坤[7]引入附着率和滑移率参数建立了考虑实时路面附着条件的跟驰模型.Yang等[8]建立了考虑最大减速度的跟驰模型,并在干燥路面和冰面进行了对比分析.基于此,文中将降雨对车辆跟驰的影响进行量化,通过车辆间的安全跟驰距离将降雨影响因素嵌入经典的全速度差FVD跟驰模型中,建立了考虑降雨影响的全速度差跟驰模型,并用实际降雨下车辆跟驰数据对模型参数进行标定,力求为降雨天气下交通流特性分析、通行能力和交通安全的研究提供依据.
1 全速度差跟驰模型
全速度差(FVD)模型是由文献[6]提出的,在优化速度(OV)模型的基础上,增加了速度差影响项,可以很好的解释了当前车速度大于后车速度时,即使2车间的跟驰距离很小,后车也不会减速的现象.全速度差模型表达式为
式中:k,λ为敏感度参数;V1,V2分别为期望速度的最小值和最大值;Δx为车头间距;lc为2车之间的安全间距;C1,C2为优化速度的待标定参数;Δxn=xn(t)-xn-1(t)为后随车n与前车n-1在t时刻之间的车头间距;Δvn=vn(t)-vn-1(t)为后随车n与前车n-1在t时刻的相对速度;vn(t)为后随车n在t时刻的速度.
文献[6]对敏感度参数做了标定.其中k值为0.41 s-1;λ值为0.5 s-1,lc值为5 m.在全速度差驰模型中,安全距离被设置为一个固定值,车头间距与安全距离的差值的大小决定了车辆优化速度,然而在实际交通流中,特别是在降雨等不利天气下,安全距离与驾驶员的反应时间、车辆的制动加速度等有关,即安全距离是随着驾驶员反应时间、车辆制动加速度的变化而变化的,且驾驶员的反应时间和车辆的制动加速度受降雨影响较大.因此文中在基于全速度差跟驰模型的基础上,引入降雨对驾驶员反应时间影响参数以及降雨对车辆制动加速度影响参数,将这2参数通过安全距离模型嵌入跟驰模型之中,从而反应降雨对车辆跟驰的影响.
2 降雨对车辆跟驰影响的量化分析
2.1 降雨对反应时间的影响
降雨天气下,尤其大雨和暴雨时,道路的能见度降低很多,增加了驾驶员辨别前方道路,以及前方车辆行驶状态的反应时间.降为了保障雨情况下车辆的行驶安全,定义雨天反应延迟时间为当能见度小于驾驶员安全视距时,驾驶员在正常反应时间的基础上预留的一段时间.正常情况下车辆的安全距离可以根据停车视距的安全距离模型得到,基于停车视距的安全距离模型表达式为
(2)
为确保车辆安全,取2倍的正常条件下安全临界距离与能见度距离之差为车辆必须保持的安全距离,由式(2)得车辆需满足
(3)
式(3)经过变换得到雨天反应延迟时间的计算式为
(4)
式中:ti为驾驶员反应延迟时间,s;s0为正常天气条件下的安全临界距离,m;sr min为雨天能见度,m;v0为车辆的行驶速度,m/s;t0为驾驶员在正常天气条件下的反应时间,s.
2.2 降雨对制动加速度的影响
轮胎与路面的附着系数主要与路表构造、轴重、轮胎类型、胎压,以及车辆行驶速度等因素有关.在降雨条件下路面积水在轮胎和路面之间产生水膜,使得车辆与轮胎的附着系数减小,其减小量取决于水膜厚度的大小.水膜厚度与降雨强度的关系为
h=0.125 8×l0.671 5×i-0.314 7×
d0.778 6×TD0.726 1(R2=0.93)
(5)
式中:h为水膜厚度,mm;l为坡面长度,m;i为坡面坡度,%;d为降雨强度,mm/min;TD为路面构造深度,mm.
路面附着系数与行车速度和水膜厚度的关系表达式为
φ=0.660 3-0.003 7v-0.005 7h
(R2=0.831 3)
(6)
考虑轮胎的磨损状态,对最大减速度进行修正,结合式(1)和(2)得到修正后的最大制动加速度表达式为
amax=ε×φ×g
(7)
式中:ε为轮胎磨损程度对制动加速度的折减,对于一般的磨损取值为0.9;g为重力加速度,9.8 m/s2.
通过式(5)~(7)可以清楚的看到降雨强度与路面附着系数的关系,同时也可以得到路面在不同降雨强度下的最大制动加速度.
2.3 安全距离模型
前车与后车之间的安全距离除与驾驶员自身的心理与身体素质有关以外,很大程度上取决于车辆本身的制动性能和驾驶员的反应时间.根据前车和后车的运动状态可以解得2车之间必须保持的安全距离为
(8)
式中:vn为前车的速度;vn+1为后车的速度;L为静止时2车之间的最小安全距离,一般为3 m;af为前车最大制动加速度;ag为后车最大制动加速度;tπ驾驶员反应时间,tπ=t0+ti;tr制动系统协调时间.
在安全距离模型中,通过车辆驾驶员反应时间和最大制动加速度这2个影响参数来反应降雨对车辆跟驰行为的影响,为下文建立考虑降雨影响的全速度差跟驰模型的建立打下基础.
3 考虑降雨影响的全速度差跟驰模型
通过量化分析降雨对车辆跟驰的影响,将驾驶员反应时间和车辆制动加速度参数通过安全距离模型嵌入到全速度差模型之中,从而体现降雨对车辆跟驰行为的影响.考虑降雨影响的全速度差跟驰模型为
V(Δx)=V1+V2tanh[C1(Δx-hc)-C2]
(9)
式中:k,λ为敏感度参数;C1,C2为优化速度的待标定参数;V1,V2分别为期望速度的最小值和最大值;Δx为车头间距;hc为2车之间的安全间距;tπ驾驶员反应时间;tr制动系统协调时间.
4 跟驰模型的标定
4.1 参数标定
所谓跟驰模型参数标定,即在已知n组因变量和自变量的情况下对模型中未知参数进行求解,使得根据模型计算出来的因变量与实际测量的因变量之间的误差最小.由此可以构建一个带有目标函数和约束条件的非线性优化模型来对跟驰模型中的参数进行求解,引用的希尔函数作为目标函数,具体表达式如下.
目标函数:
(10)

构建非线性规划问题:
minFobj=f(v,x,a,q)
s.t. hi(q)=0(i=1,2,…,nh)
gj(q)≥0(j=1,2,…,ng)
(11)
式中:Fobj为车辆的行驶状态的函数,车辆的行驶状态可由车辆的速度、相对位置,以及加速度来描述,v,x,a即为车辆的速度、位置、加速度参数;hi(q)是等式约束函数;gj(q)为非不等式约束函数.在降雨天气下的跟驰模型中,参数k,λ,C1,C2为待标定的参数,速度、流量、时间占有率参数是直接获取的,也就是说参数vn(t)是可以直接获取;参数Δxn(t),Δvn(t),V1,V2可以由直接获取的参数通过计算得到;参数af,ag可以通过降雨量与水膜的关系、水膜与路面附着系数的关系间接得到.
参数标定是典型的非线性规划求目标函数最小的问题,采用模拟退火算法对非线性规划问题进行求解,基于美国加州I880N道路上某检测点获取的交通流参数为基础,结合检测点附近的气象站的气象数据,以晴天、大雨和暴雨天气下的交通流数据为例,不同降雨条件下的模型参数的求解结果见图1~4.
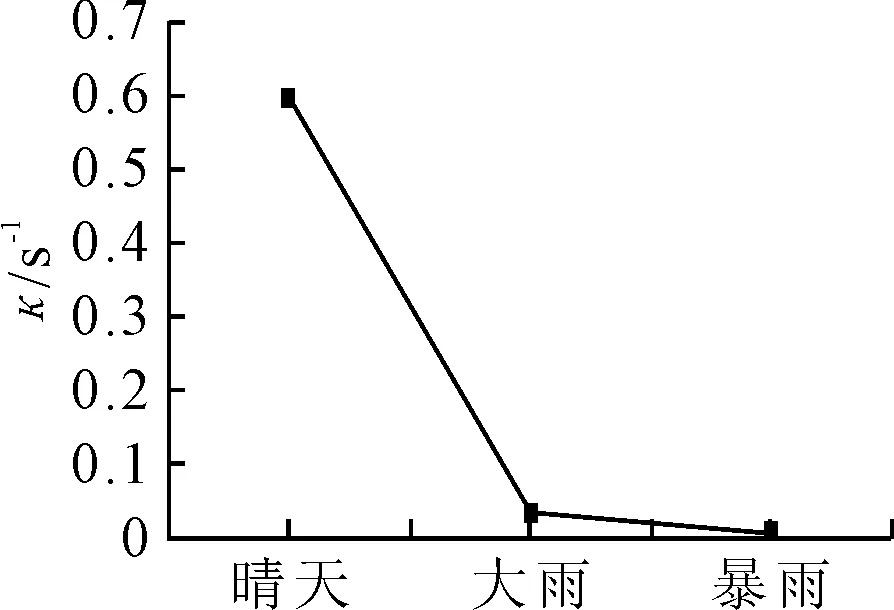
图1 参数k在不同降雨强度下的大小
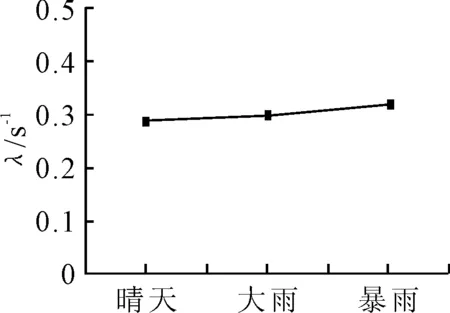
图2 参数λ在不同降雨强度下的大小

图3 参数C1在不同降雨强度下的大小

图4 参数C2在不同降雨强度下的大小
由图1~4可知,参数k和C1随着降雨强度的增加而减小,参数λ和C2随着降雨强度的增加变化不是很明显.而参数k是优化速度对加速度的影响项,参数C1是安全距离对优化速度的影响项,参数λ是2车之间速度差对加速度的影响项,C2是优化速度修正参数,由此可以看出,降雨对模型中k,C1参数影响很大,对λ,C2参数影响很小.也就是说降雨主要影响车辆的优化速度和车辆之间的安全距离,对车辆间速度差的影响很小.
4.2 误差分析
1) 评价指标选取 对交通流模型标定后,评价指标选取时参考数理统计学中的有关实测值和理论值之间评价指标,选取了相对误差均值(MARE)、相对误差方差(RMSE)作为模型标定的评价指标,其数学表达式为
(12)

2) 评价结果分析 模型参数的评价主要用未参与标定的实际数据带入模型之中求出加速度的值并与实际加速度数值进行比较,计算出两者之间的平均相对误差值和相对误差方差值,计算结果见表1.

表1 参数评价结果表
由表1可知,用实际数据标定出模型中的参数,相对误差均值和相对误差方差等误差值均很小,这说明标定出来的参数可以很好的匹配该实际情况的交通流状态.
5 结 束 语
文中将降雨对交通流的影响转化为降雨对驾驶员和车辆的影响,引入驾驶员反应延迟时间和最大制动加速度参数,通过安全距离模型将降雨对车辆跟驰的影响嵌入全速度差模型中,构建了考虑降雨影响的全速度差跟驰模型.运用实际数据采用退火模拟算法对该模型中参数进行了标定.参数k和参数C1对大雨和暴雨具有很强的敏感度,且随着降雨强度的增加敏感度也在提高.参数λ和参数C2随降雨强度的增加变化不大.所以降雨主要影响车辆的优化速度和车辆之间的安全距离,对车辆间速度差的影响很小.降雨对跟驰行为的影响是多方面的,文中从安全距离的角度出发分析了大雨和暴雨对跟驰行为的影响,降雨对跟驰其他方面的影响如车辆跟驰间距的敏感度等以及其他降雨强度下跟驰行为的变化也是进一步研究的方向.
[1]张卫华,颜冉,冯忠祥,等.雨天高速公路车辆换道模型研究[J].物理学报,2016,65(6):55-58.
[2]王殿海,金盛.车辆跟驰行为建模的回顾与展望[J].中国公路学报,2012,25(1):115-127.
[3]ARNE K,MARTIN T. Calibrating car-following models by using trajectory data: methodological study[J]. Transportation Research Record,2008,20:148-156.
[4]王殿海,陶鹏飞,金盛,等.跟驰模型参数标定及验证方法[J].吉林大学学报(工学版),2011,41(S1):59-65.
[5]姜军,陆建.基于Helly跟驰模型标定参数的跟驰行为分析[J].武汉理工大学学报(交通科学与工程版),2015,39(2): 242-245.
[6]JIANG R, WU Q S, ZHU Z J.Full velocity difference model for a car-following theory[J]. Physical Review E,2001,64(1):88-96.
[7]龚节坤.基于实时路面附着条件的跟驰模型研究[D].哈尔滨:哈尔滨工业大学,2015.
[8]YANG L H, ZHANG X Q, GONG J K , et al. The research of car-following model based on real-time maximum deceleration[J]. Mathematical Problems in Engineering,2015(6):1-9.
Full Speed Difference Following Model and Calibration Considering Rainfall Influence
YAN Ran1)YE Xiaoqun1)HAN Gaofeng2)
(SchoolofArchitectureandPlanning,AnhuiJianzhuUniversity,Hefei230022,China)1)(AnhuiTransportConsulting&DesignInstituteCo.,Ltd,Hefei230088,China)2)
To study the impact of rainfall on the car-following behavior, based on the analysis of rainfall on traffic flow, the impact of rainfall on car following behavior is analyzed by quantifying two parameters which are the driver reaction delay time and road adhesion coefficient. By embedding the two parameters into the full speed difference model through safety distance model, the full speed difference following model considering the effect of rainfall is established. Finally I880 actual data are used to calibrate the model, and the error analysis is carried out based on the calibration results. The results show that the rainfall mainly affects the vehicle optimization speed and safe distance, and has little impact on the speed difference between vehicles.
rainfall; reaction delay time; adhesion coefficient; the following model; calibration
2016-10-10
*安徽省教育厅人文社科基地重点研究项目资助(SK2015A115)
U491
10.3963/j.issn.2095-3844.2016.06.021
颜冉(1989—):女,硕士,助教,主要研究领域为交通运输规划与管理
