直流电机建模与PID控制器参数优化
2016-12-24李晓龙宛剑业
李晓龙,宛剑业
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
直流电机建模与PID控制器参数优化
李晓龙,宛剑业
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
文章首先采用simcapeTM物理建模方法对直流电机进行建模并通过实测数据校准模型中各个参数,使得所建模型能够真实的反应被控对象,然后在simulink环境下在直流电机模型基础上添加PID控制器模型,并利用数值优化的方法对PID控制器三个参数KP KI KD进行整定,使得控制器能够满足一定的设计指标要求并且当直流电机参数在一定范围内变化时仍然具有良好的鲁棒性。
PID;计算机仿真;建模;优化;SimscapeTM
10.16638/j.cnki.1671-7988.2016.01.036
CLC NO.:TP391.9 Document Code:B Article ID:1671-7988(2016)01-105-03
引言
目前基于模型设计的思想已广泛应用于直流电机控制器开发,被控对象和控制器模型是基于模型设计的起点和核心,其中重点是被控对象模型的准确性以及控制器参数优化。PID控制器的参数整定是控制系统设计的核心内容,在传统设计方法中,手动调节是完全依赖经验的试凑过程,耗费时间而且不系统化,很有可能无法达到优化设计。基于控制规则的调试方法,比如尼克尔斯法,需要大量的工作,需要研究者有良好的理论背景,它还不能对开环不稳定系统进行调节。因此如何快速准确的整定PID三个参数是的控制系统达到要求的性能成为科研工作者一个重要的课题。
1、电机建模
建模是研究系统的重要手段和前提,常用的建模方法有机理建模、测试分析建模以及机理建模与系统辨识相结合的方法。本文电机建模采用第三种方法,该建模方法是前两种方法的综合即用机理分析方法建立模型的结构,用系统测试方法来确定模型的参数。
1.1 建模分析
电机由电气部分和机械部分组成,电机模型如图1所示。
Simscape模块库中有丰富的机械、电气、液压和其他物理域组件,如电阻电感惯量组件和物理信号测试组件。利用上述组件依照图1中各个组件物理连接关系可以快速搭建起电机的物理模型如图2所示,模块之间的连线相当于物理连接,用于传递能量。通过这种方法描述的是系统的物理结构,而非底层的数学原理。模型与原理图非常相似,SimscapeTM可以从建立的模型中自动构造微分代数方程 (DAE),描述系统动态性能。
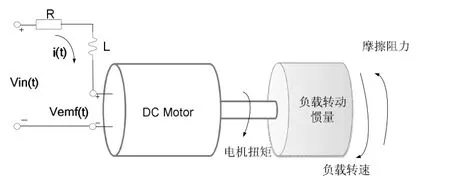
图1 电机物理模型
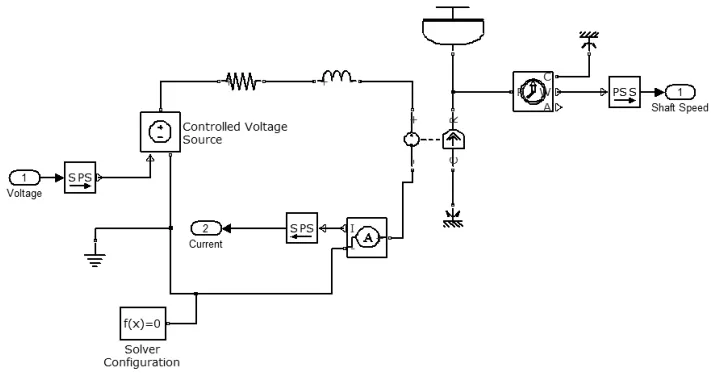
图2 电机SimscapeTM模型
1.2 模型参数辨识
上文通过机理建模建立电机物理模型,但是实际应用中往往不知道电动机的电机电感电阻以及负载的转动惯量等数据。即使制造商提供这些数据同一批次的电机参数也会有变化,为了保证模型能够真实反映实际对象需要对模型进行参数辨识。经典的系统辨识方法有阶跃响应法、频率响应法和最小二乘法。最小二乘法是一种数学优化技术,作为动态系统辨识的主要手段之一,最小二乘法可以用于各类数学模型。利用最小二乘法辨识参数过程一般为在相同的激励条件下,通过调整模型中未知参数值使得模型输出与实物实测输出数据之间误差平方和最小。上述过程在matlab中parameter estimation tool中可以很方便的实现。
2、PID控制器设计
PID(比例积分微分)英文全称为ProportionIntegration Differentiation,它以结构简单、稳定性好、工作可靠、调整方便等特点成为工业控制的主要技术之一。
PID控制器由比例部分,积分部分和微分部分构成(如下图3所示)。控制器的输入端是被控系统的控制信号与被控量间的误差,误差信号分别通过比例、积分、微分环节,并与相应的系数相乘,输出的PID控制器信号即为这三个部分输出信号之和,最终PID控制器输出信号与原始控制信号做差后控制被控量,最终形成完整的反馈回路。因此,要确定一个PID控制器只需要确定其比例、积分、微分的系数:
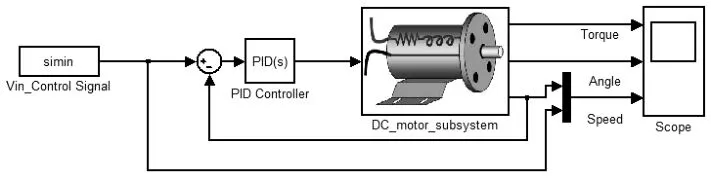
图3 直流电机PID控制模型
2.1 用PID Tuner设计PID控制器
双击打开PID模块的设置页面,如图4所示:
在Controller下拉菜单中选择控制器模式为PID。在Time-domain定义为连续域控制器和离散域间切换。
下面是最重要的一步:设置P、I、D的系数。传统的手动调节法不仅费时费力,还有可能对系统造成破坏,并且你永远不知道自己设计出的参数是否为最优。
而基于规则的调节法无法应用于开环的不稳定系统,也不能用于高阶系统和有延迟的系统,且对用户的控制理论背景要求很高,不易掌握。
Simulink提供了一个全新的GUI调节算法可以方便的完成这些复杂的工作,自动调节控制器参数以达到所期望的性能指标,通过简单的滚动条操作完成微调的功能。
点击参数设置页面上Controller settings中的“Tune”按钮打开GUI界面(点击show parameters可以完整的显示参数)。如图5所示:

图5 PID自动调节界面
PID Tuner会自动在系统缺省的工作点处对模型进行线性化处理,设计出控制器的参数。用户可以直观的通过GUI界面看到系统的响应。
界面的下方有一个滚动条工具,通过拖动滚动条可以调节系统的响应时间,这里我们将响应时间调节到0.0785s。通过GUI界面可以看到系统响应速度明显提高,并出现了一个小的过冲。
如果在界面上方的Design mode下拉菜单中选择“extended”,会出现额外的两个滚动条“带宽”和“相位裕量”,通过拖动它们可以改变系统响应的快速性和平稳性。如图6所示。

图6 调节滑块
在显示阶跃响应曲线的区域内单击鼠标右键,根据需要选择characteristics中的一项或几项,会在响应曲线上添加相应的蓝点来表示这些特征点:
- Peak Response 峰值
- Setting Time 稳定时间
- Rise Time 响应时间
- Steady State 稳定状态
左键点击这些蓝点会显示其详细信息,如图7所示:

图7 定位特征点

图8 PID参数
当用户得到满意的响应曲线后,点击Apply按钮,PIDTuner自动设计的参数就已经写入到了参数设置框中。如图8所示。
运行加入PID控制器后的直流电机模型。可以看到,响应速度得到了很大提高,被控量转速基本上已经和控制信号基本吻合了。如图9所示:

图9 仿真结果
3、结论
基于simscape物理建模可以快速的建立被控对象的物理模型,而无需考虑被控对象的复杂的数学模型,建模过程方便快捷。利用PID tuner可以快速的调节PID控制器的参数,只需在调试前设置相应的控制目标,matlab会自动的在后台调用优化算法完成KPKIKD的整定。
[1] 刘杰.基于模型的设计:MCU篇[M]. 北京:北京航空航天大学, 2011.
[2] Robyn A. Jackey. A Simple, Effective Lead-Acid Battery Modeling Process for ElectricalSystem Components Selection[J]. Journal of Power Sources, 2006, 152(2):13:56-84.
[3] 赵国才,孙广涛.电动车无刷直流电机simulink建模仿真[J].计算机系统应用, 2012.
[4] 刘道.基于改进粒子群优化算法的PID参数整定研究[D]. 衡阳:南华大学,2012.
DC Motor Modeling and Optimization of PID controller
Li Xiaolong, Wan Jianye
( Automobile and Traffic Engineering College, Liaoning University of Technology, Liaoning Jinzhou 121001 )
Firstly, the use of physical modeling method simcape DC motor is modeled and measured data by calibrating the model parameters, so that the model can be real reaction controlled object, and then add in the simulink environment PID control for DC motor based on the model model, using numerical optimization methods for PID controller tuning KP KI KD three parameters, so that the controller can meet certain design requirements and when the DC motor parameters within a certain range still has good robustness.
PID; computer simulation; modeling; optimization; SimscapeTM
TP391.9
B
1671-7988(2016)01-105-03
李晓龙,就读于辽宁工业大学汽车与交通工程学院。