液压缸非线性刚度作用下的轧机辊系振动行为及控制
2016-12-23刘浩然姜甲浩
刘 彬 李 鹏 刘 飞 刘浩然 姜甲浩
燕山大学,秦皇岛,066004
液压缸非线性刚度作用下的轧机辊系振动行为及控制
刘 彬 李 鹏 刘 飞 刘浩然 姜甲浩
燕山大学,秦皇岛,066004
针对液压系统动态特性影响下的轧机振动问题,建立一种液压缸非线性刚度约束下的轧机辊系振动模型,采用平均法求得系统的幅频响应。在Lyapunov第二方法的基础上,设计了系统的反馈控制器。以轧机实际参数为例,仿真分析轧机辊系中非线性刚度系数、外激励和无杆腔初始位移等参数对幅频响应的影响,并研究外激励幅值和无杆腔初始位移等参数发生变化时的动态分岔特性,发现随着这些参数的变化,轧机辊系振动在周期运动、倍周期运动和混沌运动等多种运动状态之间交替变化;同时在系统中引入反馈控制,通过对比控制前后的时域曲线和相平面曲线,验证了反馈控制器的有效性。研究结果为提高轧机辊系稳定性提供了理论参考。
轧机振动;幅频响应;反馈控制器;分岔特性
0 引言
随着现代工业的快速发展,各行各业对轧制产品的质量和轧制速度提出了更高的要求,而轧机振动成为制约轧制产品快速发展的主要障碍之一。轧机振动的发生给轧制过程带来很大的危害,严重时可能损坏轧机设备,甚至可能造成重大的经济损失[1]。
轧机振动问题是一个世界难题,各国专家从不同角度进行了研究[2]。Bar等[3]建立了轧机振动系统的数学模型,通过分析非线性参数和轧制速度的相互关系得出,轧制速度的大小直接影响等效阻尼的大小,进而影响系统的自激振动。杨旭等[4]结合轧制工艺润滑原理和机械振动理论,建立基于辊缝动态摩擦方程的轧机垂直振动模型,分析了变形区混合摩擦状态,轧辊-轧件表面粗糙度、轧件入口厚度与系统稳定性的关系。范小彬等[5]根据轧制界面非线性黏滑摩擦特性,建立了轧辊水平方向摩擦颤振模型及由不平衡力引起的工作辊水平方向“跳振”模型,发现当外扰力幅较小时系统呈现概周期运动, 外扰力幅较大时系统呈混沌状态。刘浩然等[6]考虑四辊轧机在轧制过程中液压压下缸和平衡缸的分段非线性约束作用,建立了轧机辊系的多分段非线性动力学模型,发现分段非线性因素影响下系统的振动行为是比较复杂的。Tran等[7]认为液压系统的非线性特性主要体现在由于速度变化引起的液压元件内部摩擦因数非线性,动态载荷使得液压元件等效刚度呈非线性变化。液压系统是轧机系统中非常典型的非线性系统,因此研究液压系统非线性约束下的轧机振动,对揭示液压系统动态特性影响下的轧机振动机理有重要价值。
本文考虑轧制过程中液压系统动态特性的影响,建立一种液压缸非线性刚度约束下的轧机辊系振动模型,分析各参数对系统幅频特性和分岔特性的影响,最后引入反馈控制,研究轧机辊系在引入控制前后的稳定性。
1 非线性弹簧力
本文主要考虑一种双作用单活塞液压缸约束下的轧机辊系的振动特性,图1为双作用单活塞液压缸的结构图。该种液压缸只在活塞的一侧装有活塞杆,因而两腔的有效面积不同,往返的运动速度和作用力也不相等,液压缸活塞运动改变了两腔液体的有效长度,引起了液压油的刚度的变化。
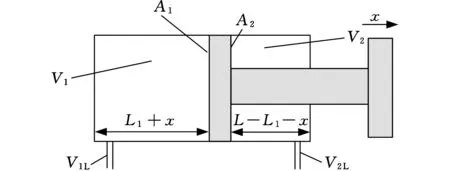
图1 单活塞液压缸结构图
在液压系统中, 液压油实际上是以与弹簧大体相同的方式压缩。液压缸系统弹簧刚度由活塞杆刚度和液压油刚度串联组成。活塞杆的体积模量是液压油体积模量的近百倍,故可以把活塞杆看作刚体处理,液压缸的非线性刚度主要由液压油的刚度决定[8],其变化规律为[9]
(1)
式中,K为液压油的体积模量;L为液压缸的有效行程;Ai为液压缸活塞两侧的有效面积,i=1,2;L1为无杆腔的初始有效长度;x为系统颤振位移;ViL为阀与缸某一侧之间液压管路中液压油的体积,i=1,2。
系统液压缸的弹簧力可以表示为
(2)
由于V1L、V2L与A1(L1+x)、A2(L-L1-x)相比很小,因此液压缸的弹簧力可以表示为
(3)
由式(3)可以看出,液压缸的弹簧力随活塞位置变化呈现非线性,这为研究液压缸非线性刚度约束下的轧机辊系振动问题提供了理论基础。
2 轧机辊系振动模型
在轧机垂直振动中,液压系统的非线性约束作用不可忽略[10],因此将其等效为弹簧刚度k(x)加入到轧机辊系模型中。考虑到四辊轧机上下辊系沿轧制线对称[11],故以上辊系为研究对象,将其等效为一个质量块的单自由度集中参数模型,建立图2所示的轧机辊系动力学模型。其中,m为轧机工作辊和支撑辊的等效质量,c为轧机系统的线性阻尼系数,k为轧机系统的线性刚度系数,F为外激励幅值,τ为引入轧机系统的控制输入量。本文主要考虑双作用单活塞液压缸非线性刚度约束作用,暂不考虑液压缸和轧机系统的非线性摩擦力。根据广义耗散拉格朗日原理,建立一种双作用单活塞液压缸非线性刚度约束下的轧机系统动力学方程:
(4)
式中,α为液压缸非线性刚度的约束系数。
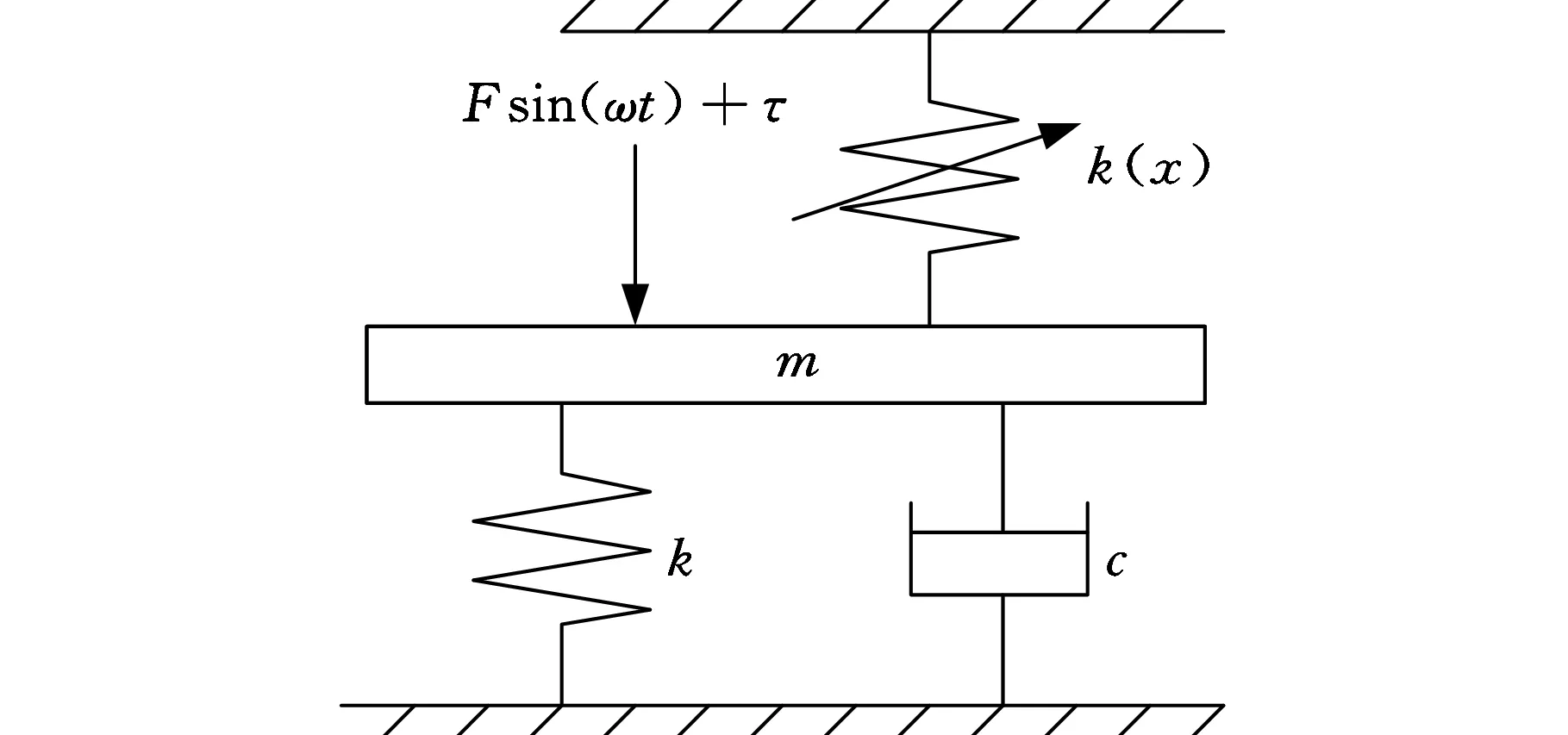
图2 轧机辊系的动力学模型
该模型考虑了液压缸非线性刚度k(x)的约束作用,同时引入控制输入量τ对系统进行反馈控制。
3 幅频响应求解
为便于计算,将系统动力学方程式(4)简化成如下形式:
(5)

(6)
(7)
令式(6)中的ε=0,导出派生系统的解及其导数:
x=acos(ωt-θ)
(8)

(9)
其中,a和θ为时间的慢变函数,并认为a和θ在一个周期内保持不变,得到平均化方程:
(10)
(11)
其中,φ=ωt-θ。将式(7)代入式(11)得到
F*cosθ+δaω
(12)
(13)
(14)
将式(12)~式(14)代入式(10)可以得到平均化的具体方程:
(15)
(16)
式(16)即为液压缸动态特性影响下的轧机辊系的幅频方程,是进一步研究轧机振动特性的基础。
4 轧机辊系的稳定性控制
将液压弹簧力的非线性动态特征归结为Duffing方程,同时系统中引入控制输入量,基于Lyapunov稳定判别法给出轧机辊系渐进稳定的条件。
以式(1)所示的液压缸动态刚度模型为例,对其在原点处进行泰勒级数展开:
(17)
弹簧弹性势能U具有对称性,可以表示为
(18)
则弹簧力可以表示为
(19)
将控制输入量引入轧机辊系模型,可得系统动力学方程
(20)
为了便于分析,将式(20)中的一次项和三次项系数用字母κ1和κ2代替,简化处理后可得
(21)
本文的控制目的是令式(21)的解为预期函数xd(t),为达到这个目的,选择控制输入为[12]
(22)

联立式(21)和式(22)可得动力系统
(23)
由式(23)可以看出,系统的误差动力瞬间行为是由增益kd和kp的大小决定的。为判定kd和kp的大小,构造如下Lyapunov函数:
(24)
0<λ<δ+kd
(25)
(26)
5 数值分析
某厂四辊轧机实际参数为:m=1.44×105kg,c=2.04 MN·s/m,k=23.5 GN/m,L=0.11 m,A1=0.6361 m2,A2=0.3243 m2,K=1.6 GPa,ε=0.01,kd=1.1 kN/m,λ=1.0×103,kp=1.1 MN/m。对轧机辊系振动系统进行数值仿真,分析轧机系统的幅频特性、分岔特性以及加入控制后的振动特性,研究轧机辊系的振动行为。
5.1 幅频特性
考虑轧机辊系振动系统受到不同轧制参数的影响,以非线性刚度系数α、无杆腔初始位移L1和外激励幅值F为研究对象,分析这些参数对轧机辊系振动的影响规律。
由图3可以看出,α的大小直接影响轧机辊系的固有频率。随着非线性刚度系数α的增大,轧机辊系固有频率减小,系统幅频曲线向左平移,远离轧机辊系的共振频率。同时,α的增大,减小了轧机辊系的振动幅值,有效地减小了外部扰动对轧机辊系振动的影响。
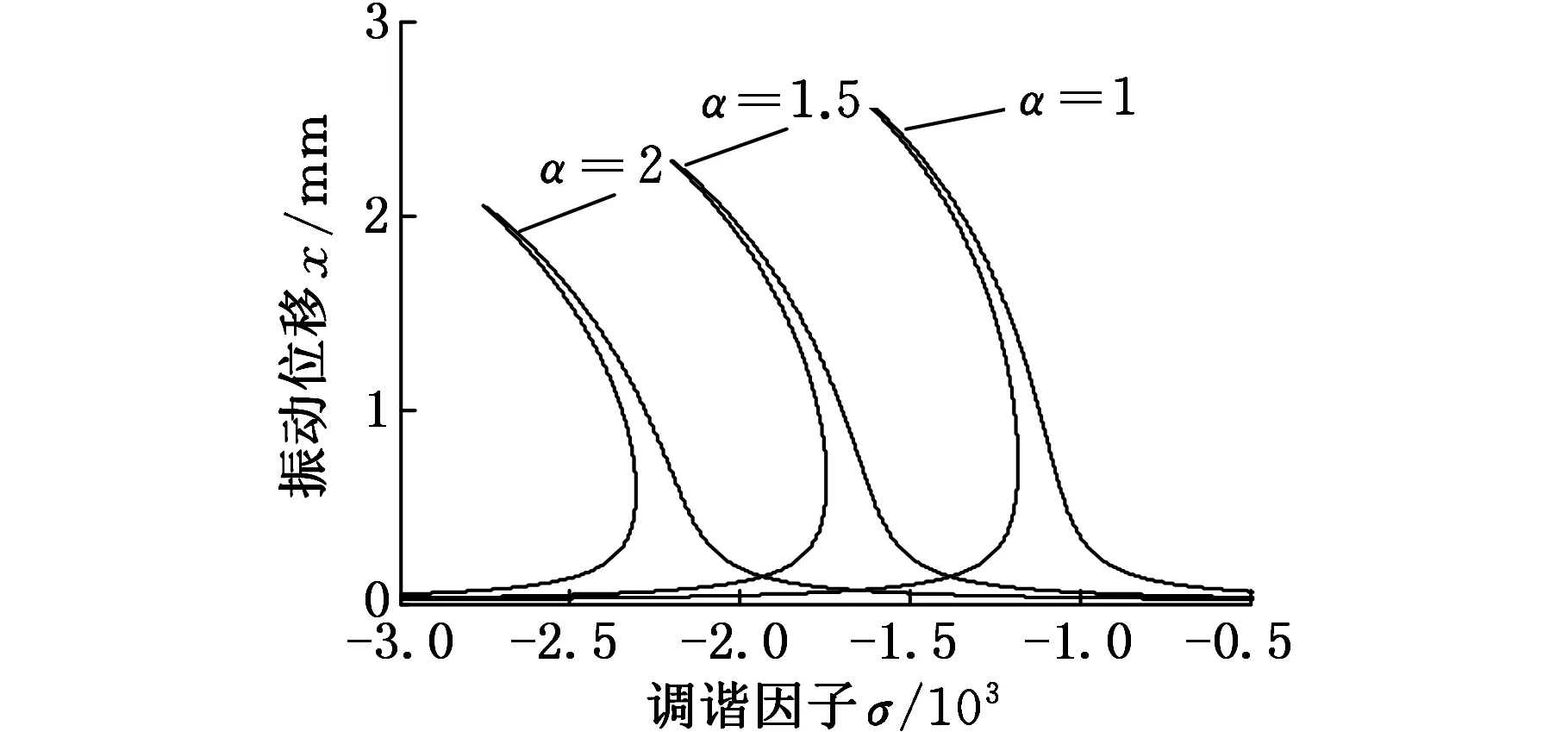
图3 非线性刚度系数对幅频特性的影响
从图4可以发现,系统幅频特性曲线对无杆腔初始位移L1非常敏感。L1小幅度减小,系统幅频曲线的拐弯程度明显增大,轧机辊系的幅频曲线的跳跃现象变得明显,系统更易于失稳。因此,适当地控制液压缸无杆腔初始位移L1位置,有利于轧机辊系的稳定性。
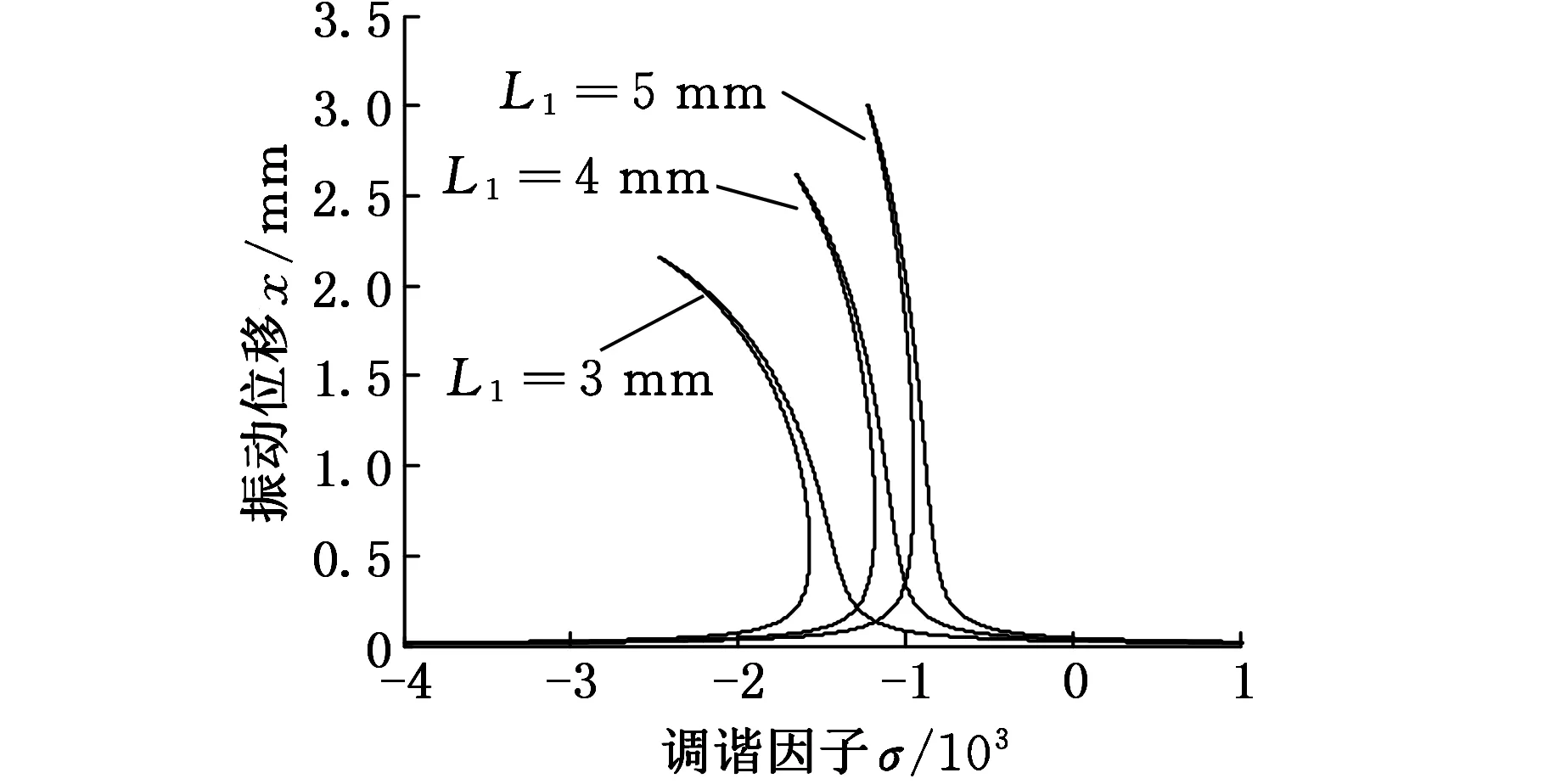
图4 初始位移对幅频特性的影响
对比图5中的三条曲线可以发现,外激励幅值F的大小直接影响系统振动幅值的大小。外激励幅值F的增大将使轧机辊系振动幅值增大,同时系统的主共振频带变宽,系统的不稳定范围扩大。
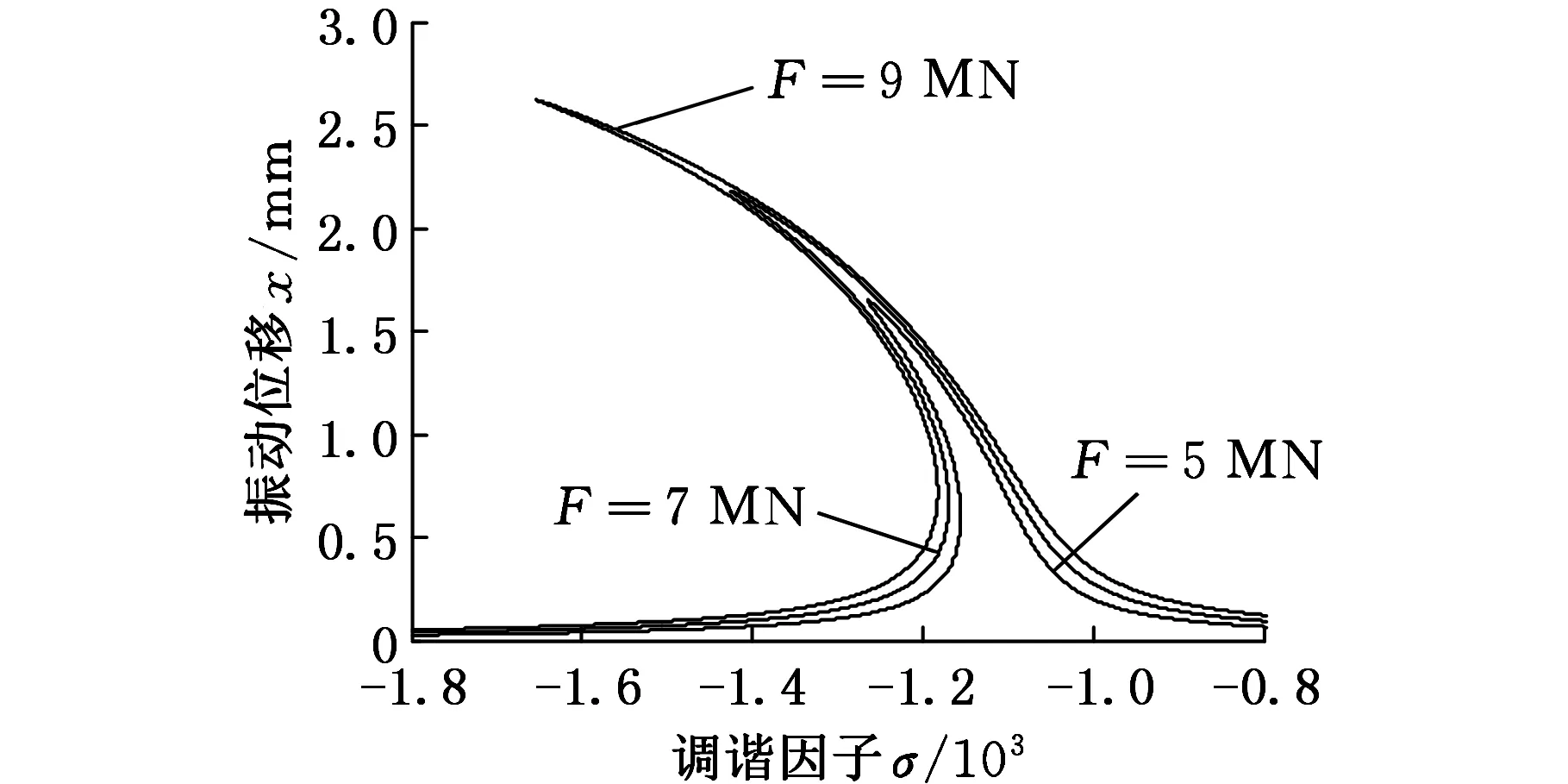
图5 外激励幅值对幅频特性的影响
对比图3~图5所示的幅频特性曲线可以看出,非线性刚度系数、无杆腔初始位移和外激励幅值等参数的变化影响着幅频特性的变化,因此可以适当地控制这些参数,有效地降低共振对轧机辊系的危害。
5.2 分岔特性
以液压缸无杆腔初始位移L1和外激励幅值F为分岔参数,分析系统分岔响应随液压缸无杆腔初始位移L1和外激励幅值F的变化规律,研究液压缸无杆腔初始位移L1和外激励幅值F对系统稳定性的影响。
图6~图9所示为液压缸无杆腔不同初始位移L1时的分岔特性。通过观察不同初始位移L1的相平面图和Poincare截面,分析液压缸非线性刚度约束系统的分岔响应随初始位移L1的变化规律。
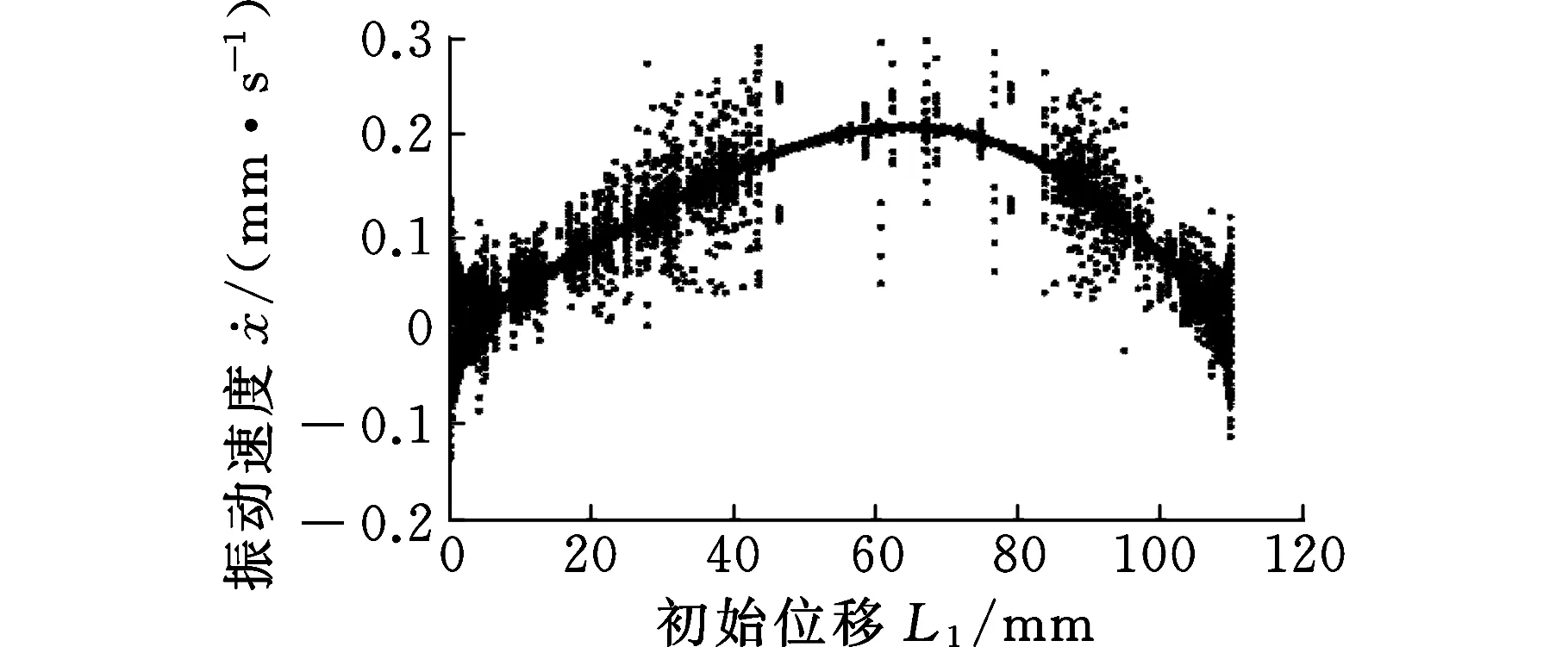
图6 L1变化时的分岔特性
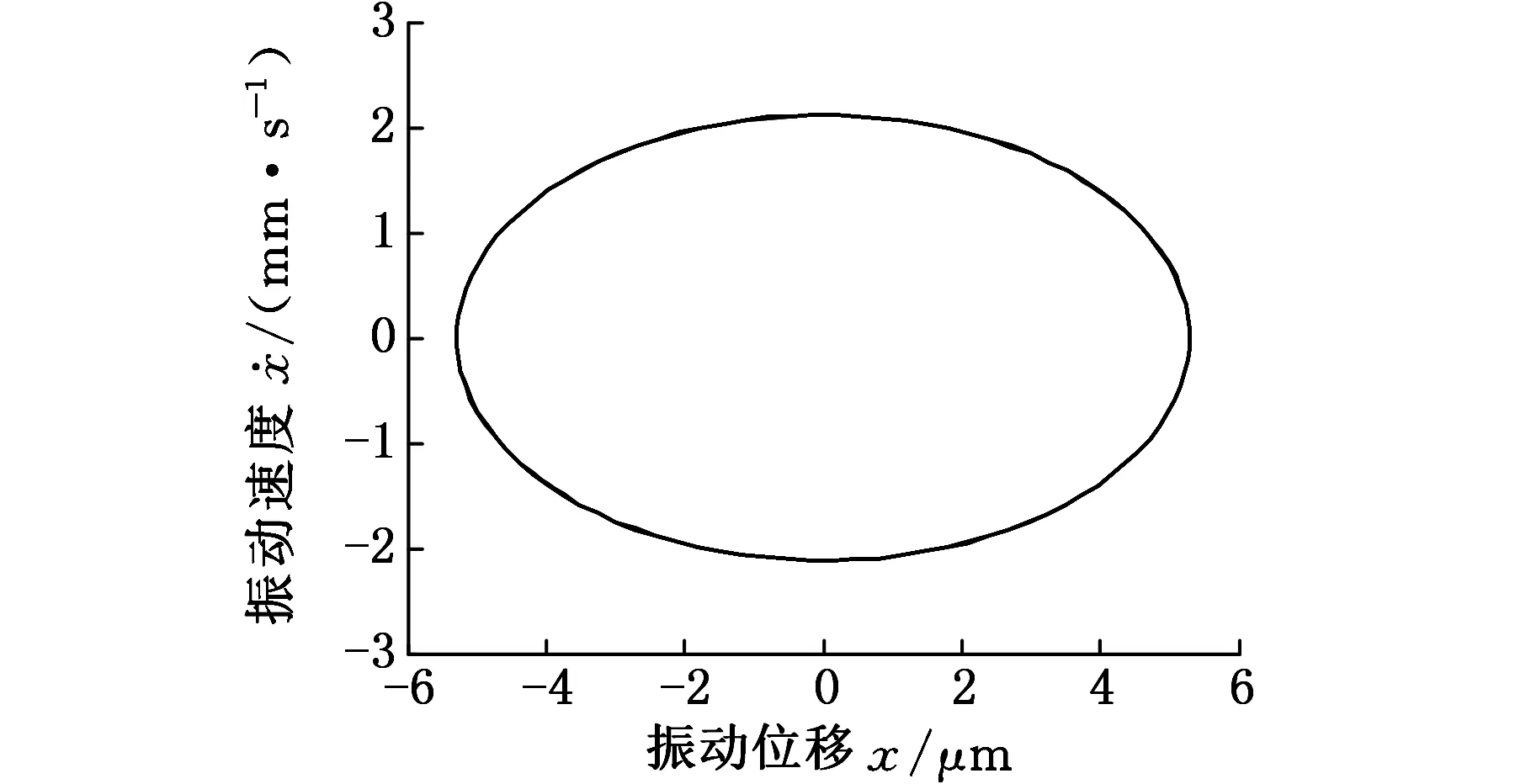
(a)相图
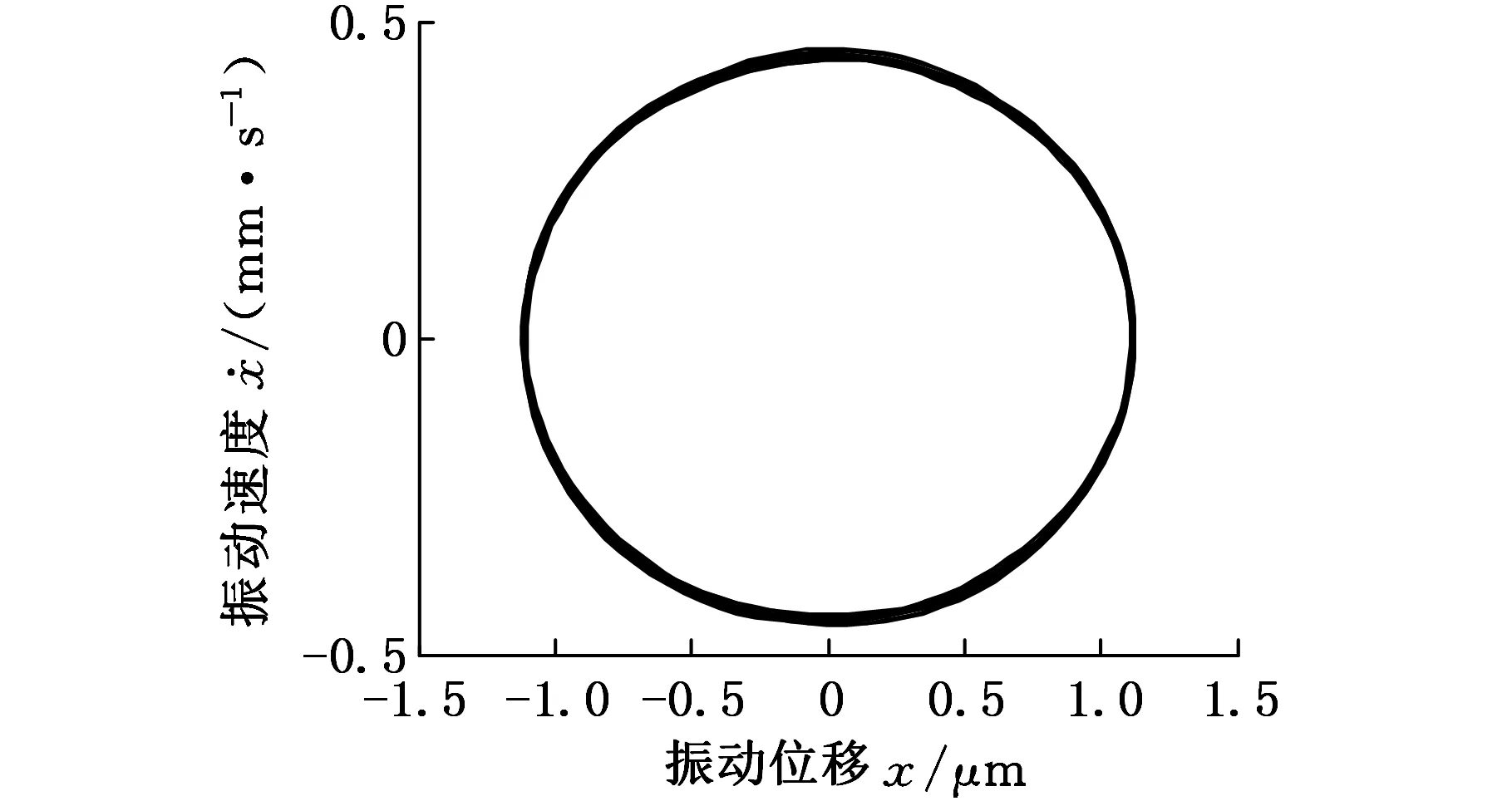
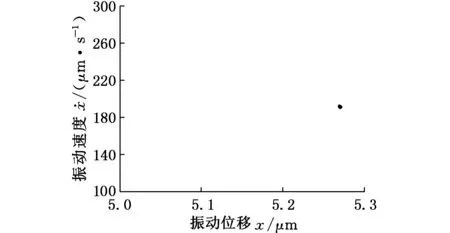
(b)Poincare截面图7 L1=5 mm时系统的相图和Poincare截面
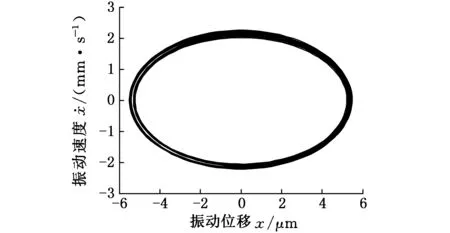
(a)相图
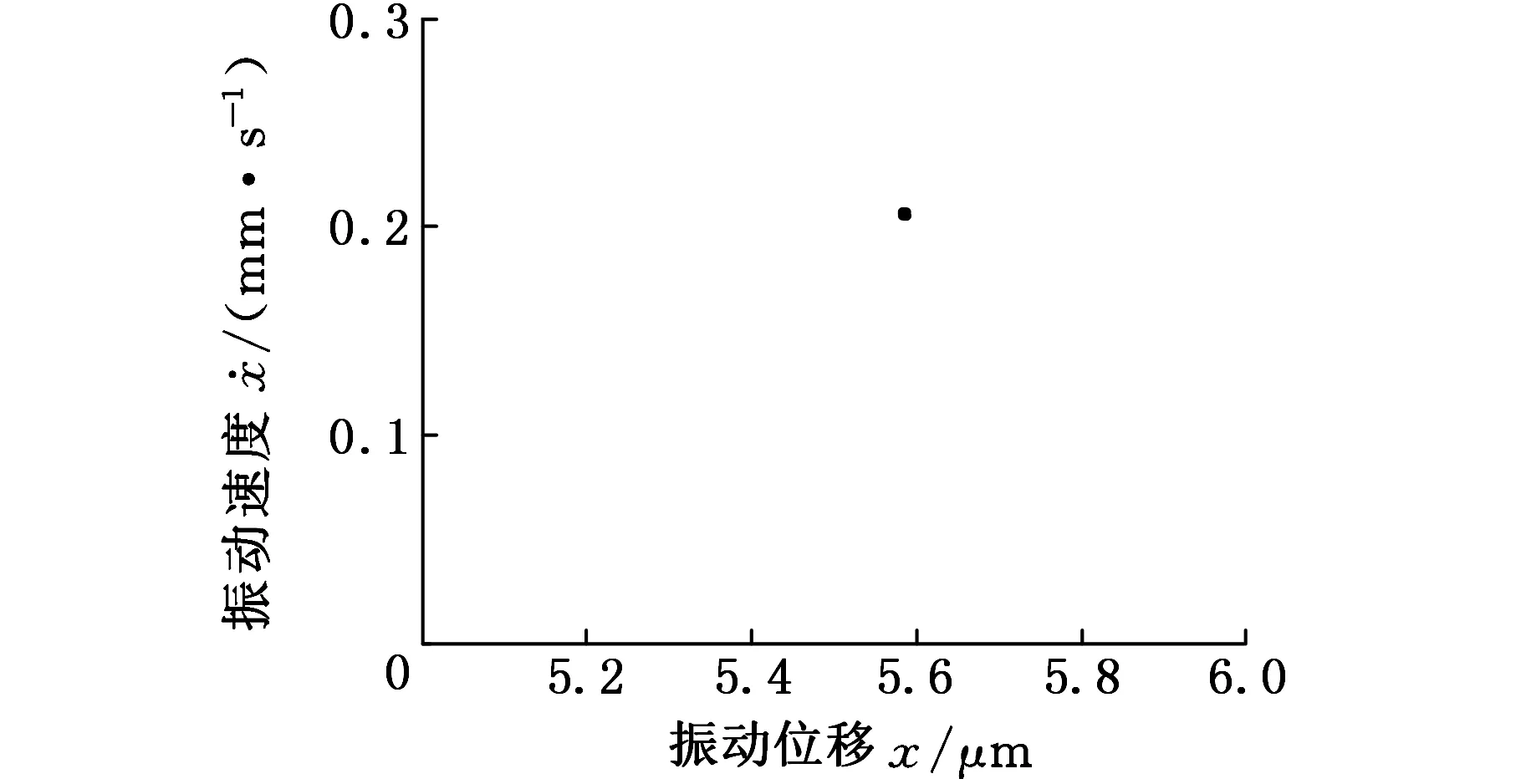
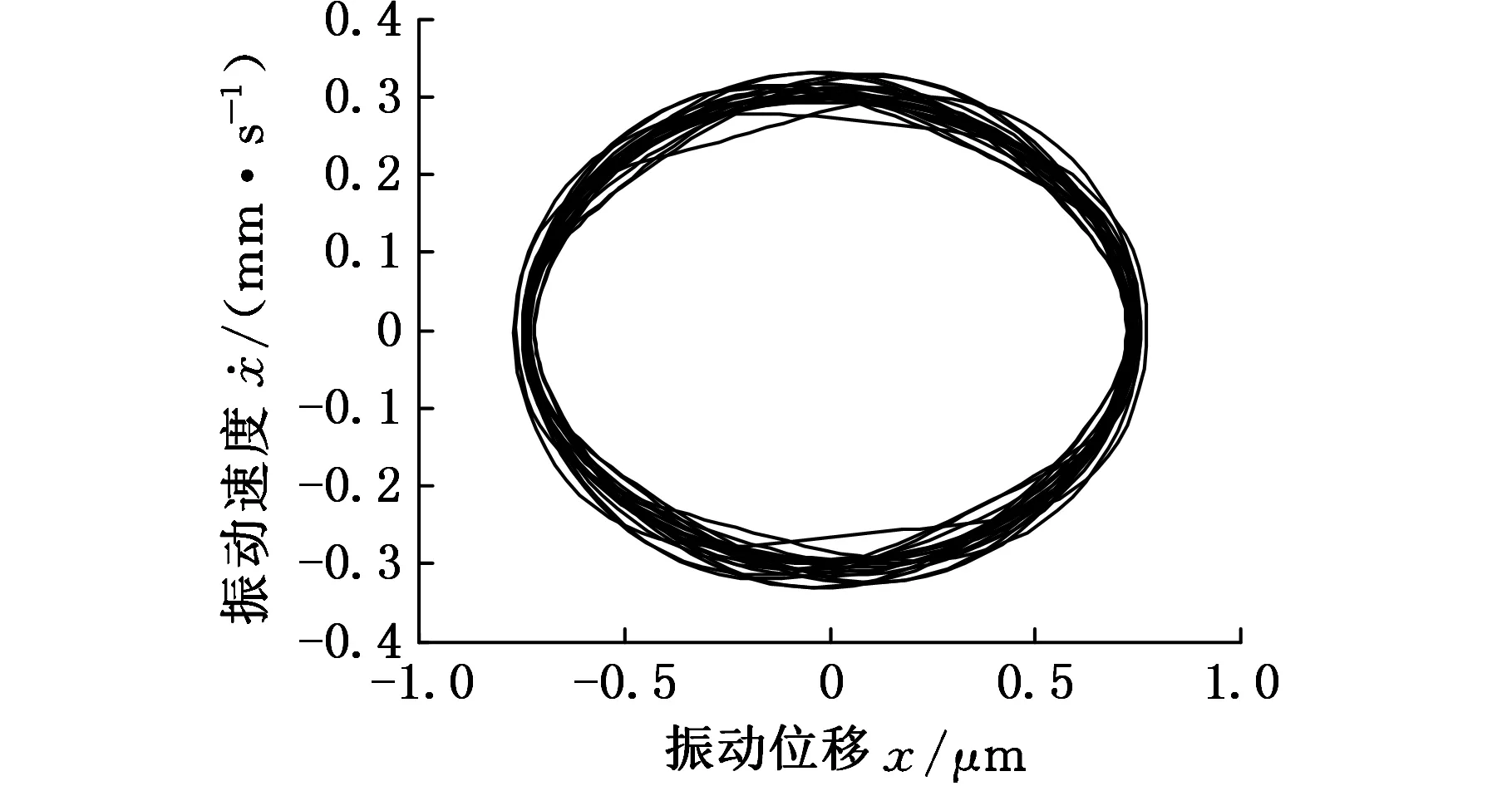
(b)Poincare截面图8 L1=60 mm时系统的相图和Poincare截面
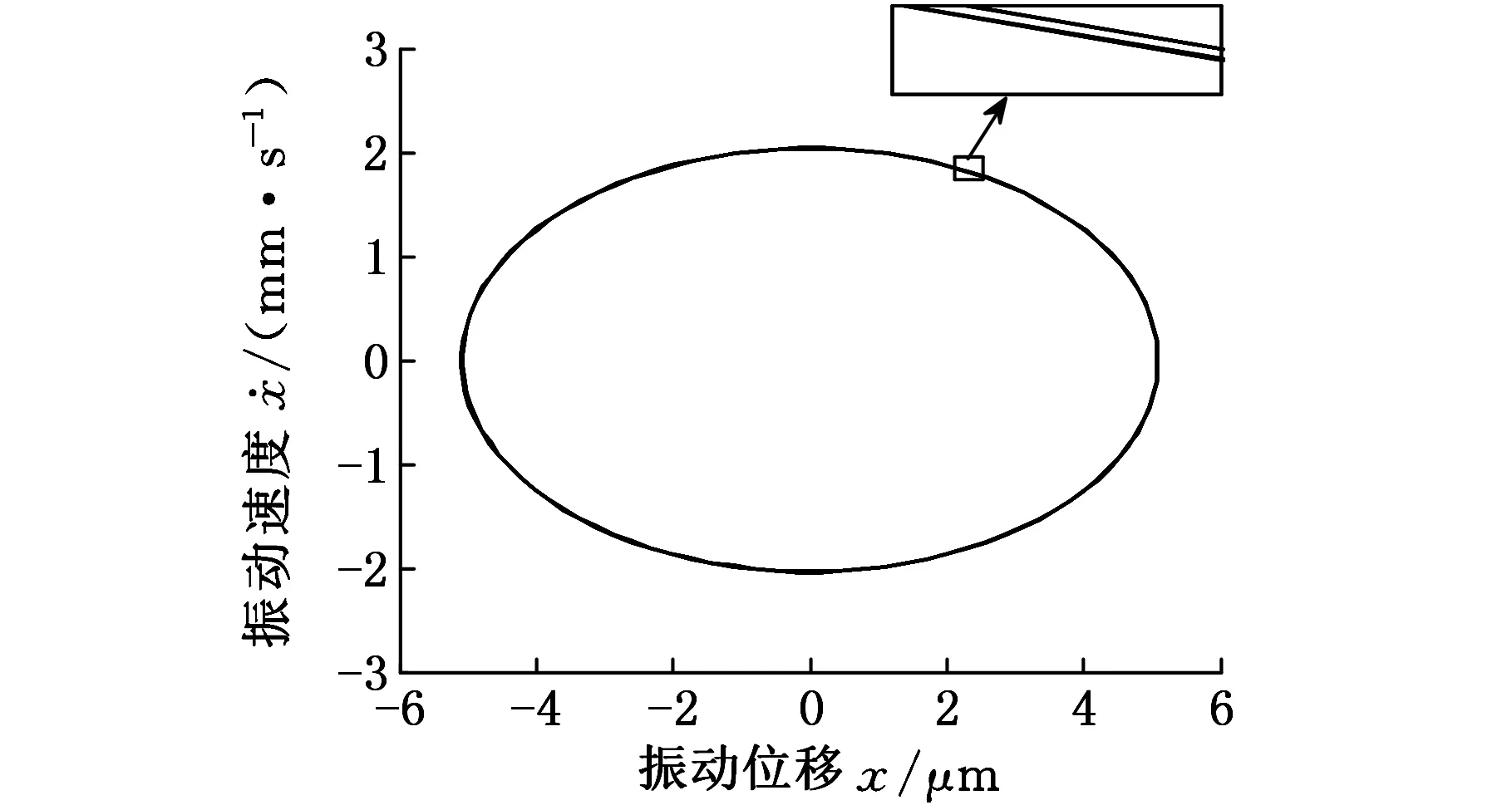
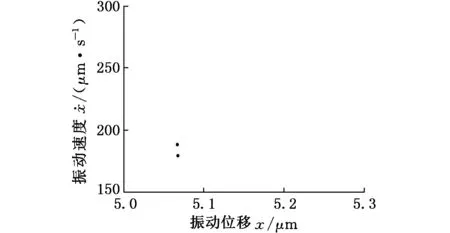
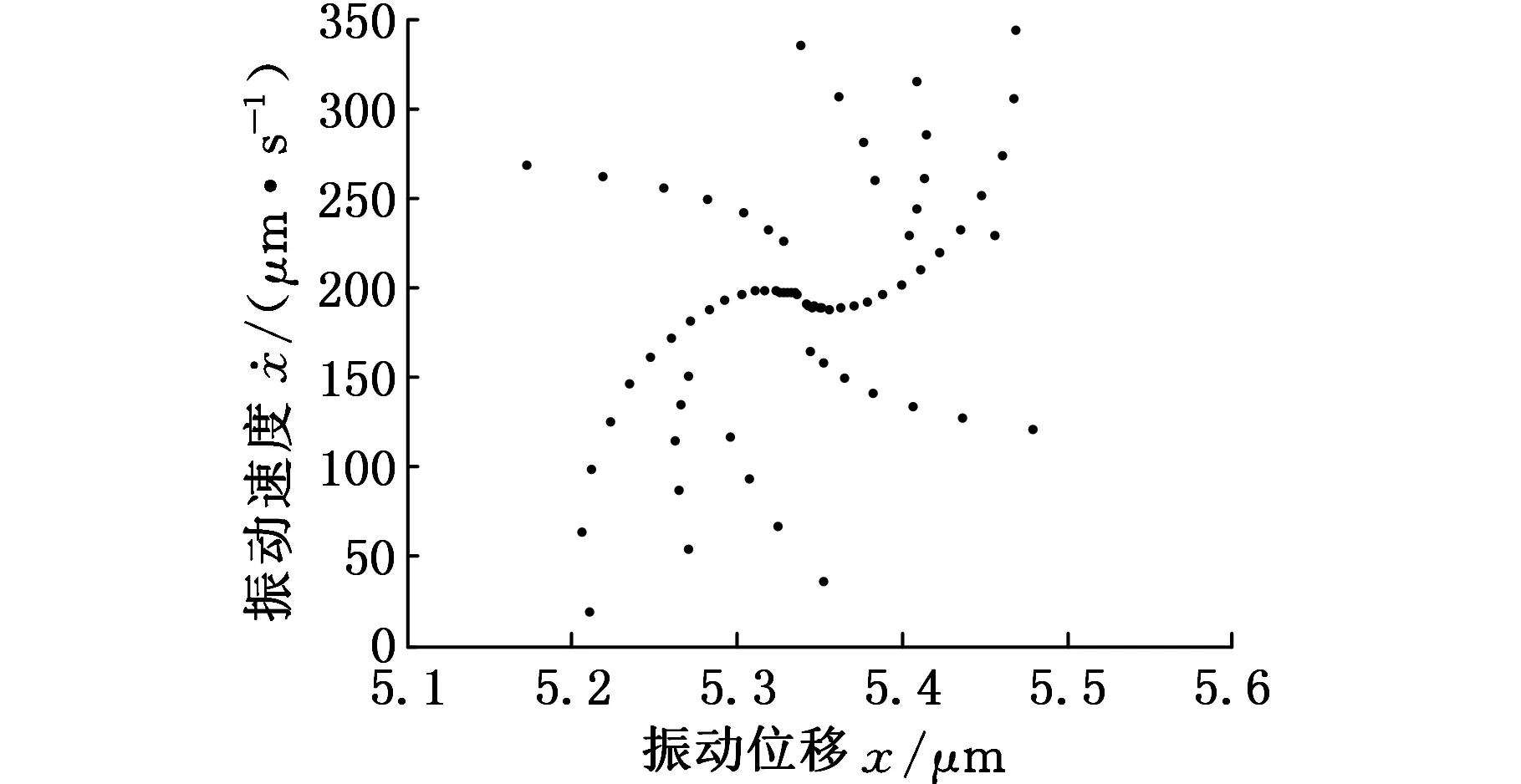
(a)相图
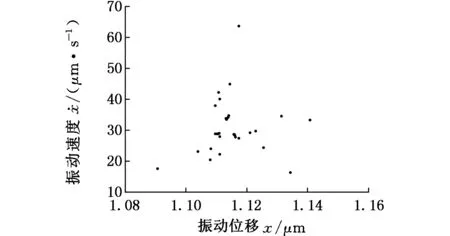
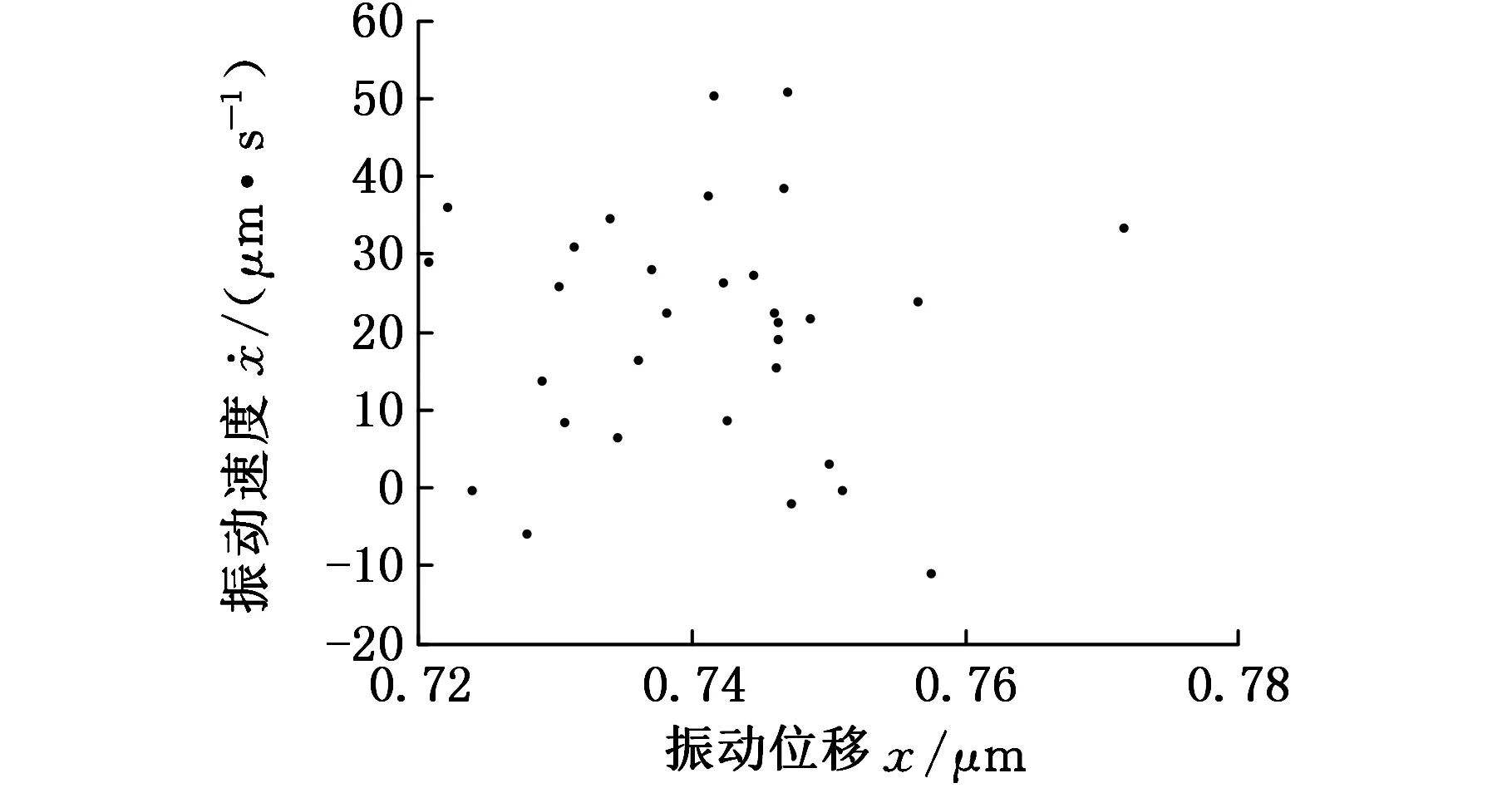
(b)Poincare截面图9 L1=106 mm时系统的相图和Poincare截面
由图6可以看出,液压缸无杆腔的初始位移位于中间区域时,非线性刚度表现为弱非线性,系统大致上处于周期运动的状态;液压缸无杆腔的初始位移位向两边靠近时,非线性刚度约束作用较强,分岔行为变得复杂而不稳定。在图7~图9中,当L1=60 mm即活塞初始位置处于液压缸的中间区域时,系统相图是一封闭的曲线(图8a),Poincare截面上表现为一个孤立的点(图8b),表明此时系统为周期运动。当L1=5 mm,106 mm即活塞初始位置处于液压缸的两端时,系统相图不再是一个封闭的曲线,其对应的Poincare截面是一些有界离散的点,表明系统已经进入了混沌运动状态。因此,控制无杆腔的初始位移处于中间区域,能够有效地保证轧机辊系的稳定性。
图10~图13为不同外激励幅值F时的分岔特性。观察轧机辊系的分岔响应随外激励幅值F的变化规律,并通过相平面图和Poincare截面对分岔响应加以验证,分析外激励幅值对轧机辊系振动的影响。
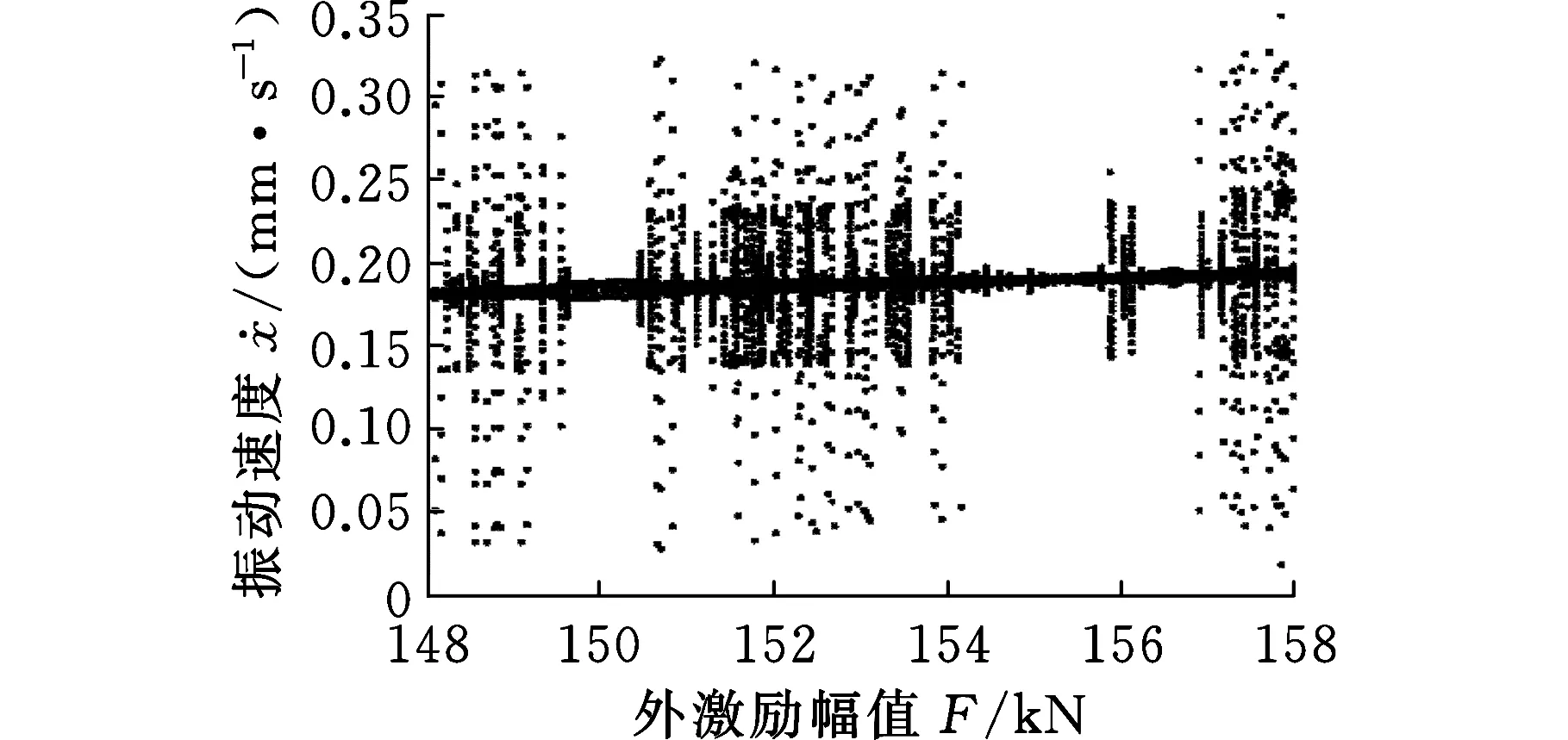
图10 F变化时的分岔特性
(a)相图
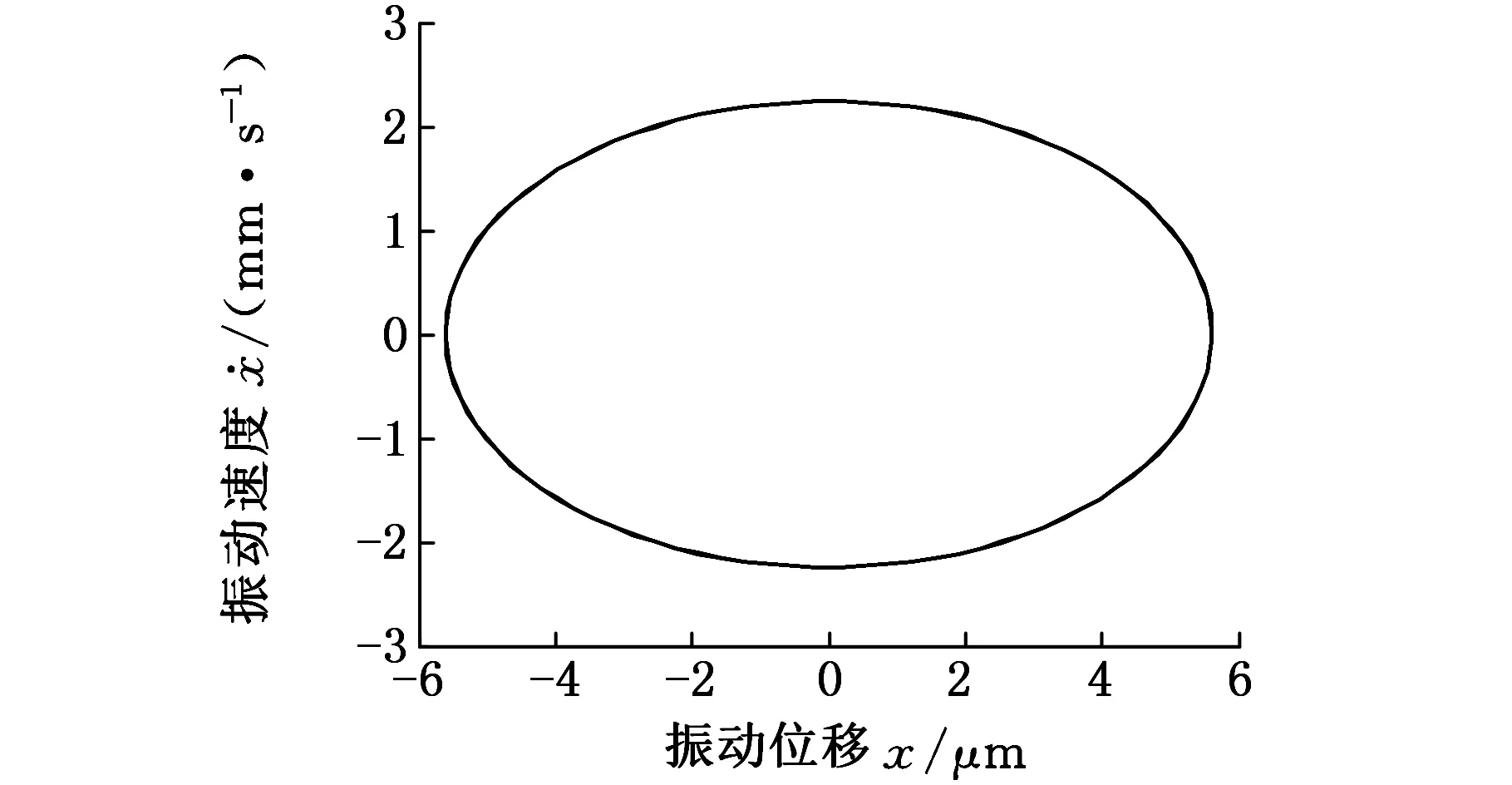
(b)Poincare截面图11 F=156 kN时系统的相图和Poincare截面
(a)相图
(b)Poincare截面图12 F=150 kN时系统的相图和Poincare截面
(a)相图
(b)Poincare截面图13 F=158 kN时系统的相图和Poincare截面
从图10中可以发现,随着外激励幅值的变化,轧机辊系振动在周期运动、倍周期运动和混沌运动等多种运动状态之间交替变化。当F=156 kN时(图11),系统相图是一个封闭的曲线,Poincare截面上表现为一个孤立的点,表明此时系统为周期运动。当F=150 kN时(图12),系统相图仍是一个封闭的曲线,Poincare截面上表现为两个孤立的点,说明轧机辊系将会出现倍周期运动。当F=158 kN时(图13),系统相图不再是一个封闭的曲线,其对应的Poincare截面是一些有界离散的点,表明系统已经进入了混沌运动状态。
结合图6~图13所示的分岔图、平面图和Poincare截面可以发现,无杆腔初始位移和外激励幅值的变化影响着轧机系统的动力学行为,轧机辊系可能出现周期运动、倍周期运动和混沌运动等复杂的运动状态,使轧制产品表面出现有规律的周期振纹或振痕,影响轧制产品的质量。
5.3 反馈控制研究
考虑到轧机振动的不可预测性,对此系统加入控制输入,基于Lyapunov判别法,给出系统渐进稳定的条件,通过数值仿真,对比分析加入控制前后的系统的稳定性。
图14~图17为加入控制前后的时域曲线和相平面曲线。图14和图15所示分别为振动位移曲线和振动速度曲线,为了清晰地表现加入控制后的效果,在t≥0.05 s时才加入控制。从图14和图15可以看出,加入控制前,系统的运动是混乱无序的;加入控制后,经过短暂的时间,系统的运动曲线开始进行等幅振荡并且幅值有很大程度的减小。图16为t≥0时的相平面曲线,图17为t≥0.05 s的相平面曲线,对比图16和图17可以发现,系统在没加入控制之前,系统的运动是非常复杂的,加入控制后系统开始进入稳定的周期运动。由图14~图17可以看出,控制输入量的加入对轧机辊系振动行为有着较为明显的作用。反馈控制的加入可减少轧机辊系剧烈振动现象的发生,保证系统的稳定运行。
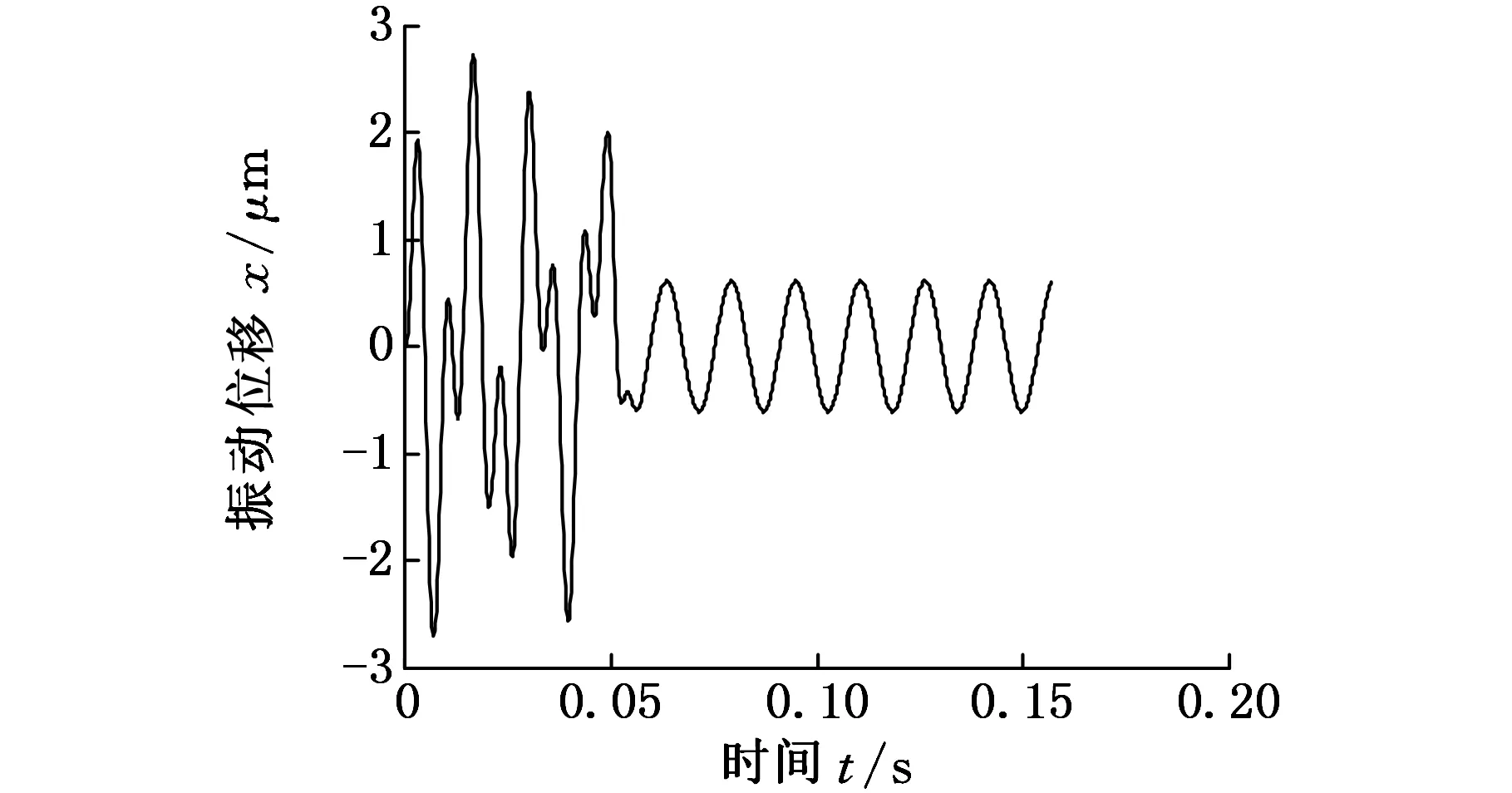
图14 位移曲线
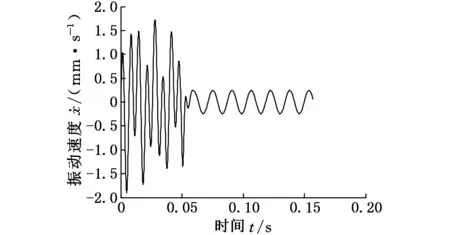
图15 速度曲线
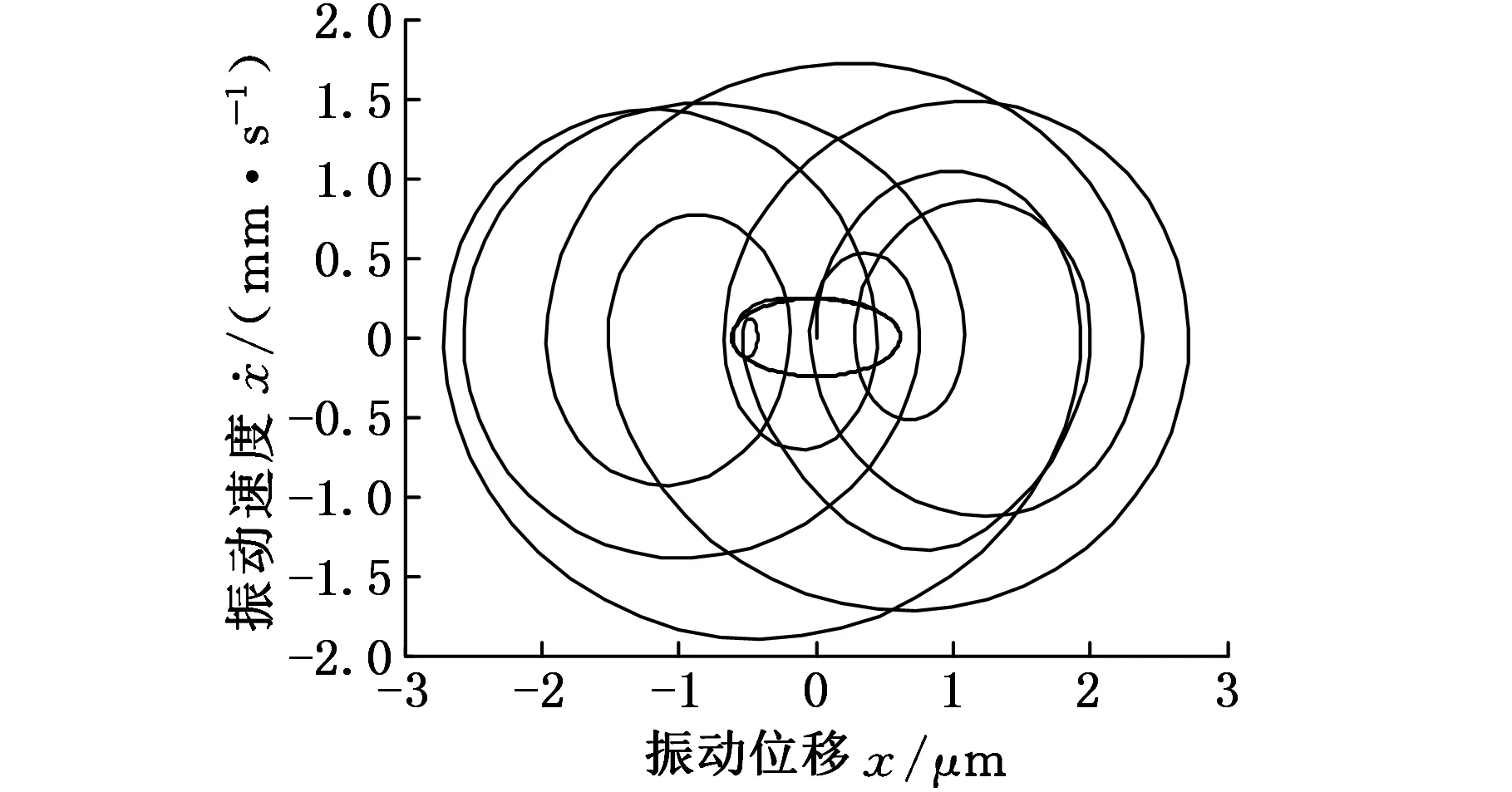
图16 相平面曲线
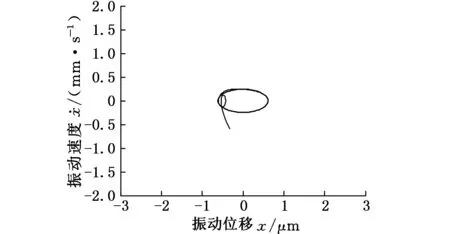
图17 t≥0.05 s时的相平面曲线
6 结论
(1)考虑轧制过程中液压系统动态特性的影响,建立了一种液压缸非线性刚度约束下的轧机振动模型。在该模型基础上,求得幅频响应方程,并仿真分析非线性刚度系数、外激励幅值和无杆腔初始位移等参数对轧机振动的影响。
(2)分析了外激励幅值和无杆腔初始位移对轧机系统分岔特性的影响,发现在不同的外激励幅值和无杆腔初始位移下,轧机辊系振动在周期运动、倍周期运动和混沌运动等多种运动状态之间交替变化。因此,可以通过调节外激励幅值和无杆腔初始位移等参数改变轧机辊系的动力学行为。
(3)对比加入控制前与控制后的系统时域曲线和相平面曲线,发现系统在没加入控制之前,系统的运动是混乱无序的,加入控制后系统经过短暂的时间开始稳定地周期运动,表明了反馈控制器的有效性。这为保证轧机辊系的平稳运行提供了理论参考。
[1] Wu Shengli, Shao Yimin, Wang Liming, et al. Relationship between Vibration Marks and Rolling Force Fluctuation for Twenty-high Roll Mill[J]. Engineering Failure Analysis, 2015, 55(1): 87-99.
[2] Heidari A, Forouzan M R.Optimization of Cold Rolling Process Parameters in Order to Increasing Rolling Speed Limited by Chatter Vibrations[J]. Journal of Advanced Research,2013,4(1):27-34.
[3] Bar A,Swiatoniowski A. Interdependence between the Rolling Speed and Non-linear Vibrations of the Mill System[J]. Journal of Materials Processing Technology, 2004, 155/156: 2116-2121.
[4] 杨旭,李擎,童朝南,等. 基于辊缝动态摩擦方程的铝板冷轧机垂振机理分析[J]. 北京科技大学学报, 2014, 36(1): 104-109. Yang Xu, Li Qing, Tong Chaonan, et al. Vertical Vibration Mechanism Analysis of Aluminum Cold Rolling Mills Based on the Dynamic Friction Equation In Roll Gap[J]. Journal of University of Science and Technology Beijing, 2014, 36(1): 104-109.
[5] 范小彬,臧勇,王会刚. 热连轧机水平振动特性研究[J]. 钢铁, 2010, 45(9): 62-66. Fan Xiaobin, Zang Yong, Wang Huigang. Research on Hot Rolling Mill Horizontal Vibration[J]. Iron and Steel, 2010, 45(9): 62-66.[6] 刘浩然,刘飞,侯东晓,等. 多非线性弹性约束下轧机辊系振动特性[J]. 机械工程学报,2012,48(9):89-94. Liu Haoran, Liu Fei, Hou Dongxiao, et al. Vibration Characteristics of Mill Rolls under Multi-segment Nonlinear Elastic Constraints[J]. Journal of Mechanical Engineering, 2012, 48(9): 89-94.
[7] Tran X B, Hafizah N, Yanada H. Modeling of Dynamic Friction Behaviors of Hydraulic Cylinders[J]. Mechatronics, 2012, 22(1) 65-75.
[8] 王林鸿,吴波,杜润生,等. 液压缸运动的非线性动态特征[J]. 机械工程学报,2007, 43(12): 12-19. Wang Linhong, Wu Bo, Du Runsheng, et al. Nonlinear Dynamic Characteristics of Moving Hydraulic Cylinder[J]. Journal of Mechanical Engineering, 2007, 43(12): 12-19.
[9] 朱勇,姜万录,刘思远,等. 非线性液压弹簧力对电液伺服系统非线性动力学行为影响的研究[J]. 中国机械工程, 2015, 26(8): 1085-1091. Zhu Yong, Jiang Wanlu, Liu Siyuan, et al. Research on Influences of Nonlinear Hydraulic Spring Force on Nonlinear Dynamic Behaviors of Electro-hydraulic Servo System[J]. China Mechanical Engineering, 2015, 26(8): 1085-1091.
[10] Lorinc M, Szabolcs F, Nariman S. A Practical Method for Friction Identification in Hydraulic Actuators[J]. Mechatronics, 2011, 21(1): 350-356.
[11] Hu P H, Ehmann K F. A Dynamic Model of the Rolling Process. Part 1: Homogeneous Model; Part 2: Inhomogeneous Model[J]. International Journal of Machine Tools and Manufacture, 2000, 40(1): 1-31.
[12] Nijmeijer H, Berghuis H. On Lyapunov Control of the Duffing Equation[J]. IEEE Transactions on Circuits and Systems I,1998,42 (8):473-477.
(编辑 苏卫国)
Vibration Behavior and Control of Roll System under Nonlinear Stiffness of a Hydraulic Cylinder
Liu Bin Li Peng Liu Fei Liu Haoran Jiang Jiahao
Yanshan University,Qinhuangdao,Hebei,066004
For the vibrations of rolling mill under the influences of dynamic characteristics of hydraulic system, a kind of vibration model of a roll system was established under the constraints of the nonlinear stiffness of hydraulic cylinder. Amplitude-frequency response of the vibration system was obtained by using average method, the feedback controller of the system was designed based on the Lyapunov second method. Lastly, parameters of the actual mill were used to conduct a simulation research and parameters such as nonlinear stiffness coefficient, external excitation and initial displacement of the rodless cavity were analyzed how did which to affect the amplitude-frequency response. The dynamic bifurcation characteristics of the excitation amplitude and the initial displacement of the rodless cavity were studied, results show that as the changes of the parameters, the rolling mill will cause periodic, period-doubling, chaotic motion and a series of complex movements. At the same time, the feedback control was introduced, and the effectiveness of the feedback controller was verified by comparing the time domain curves and the phase plane curves, which provides a theoretical basis to improve the stability of rolling mill rolls.
rolling mill vibration; amplitude-frequency response; feedback controller; bifurcation characteristics
2015-12-18
国家自然科学基金资助项目(51405068);河北省自然科学基金资助项目(E2015203349)
TH113;O322
10.3969/j.issn.1004-132X.2016.23.012
刘 彬,男,1953年生。燕山大学电气工程学院教授、博士研究生导师。主要研究方向为轧机振动及测量技术。李 鹏,男,1990年生。燕山大学电气工程学院硕士研究生。刘 飞,男,1986年生。燕山大学信息科学与工程学院博士研究生。刘浩然,男,1980年生。燕山大学信息科学与工程学院副教授。姜甲浩,男,1991年生。燕山大学电气工程学院硕士研究生。
