多探头星敏感器星图融合姿态确定精度
2016-12-23熊亚洲武延鹏程会艳
熊亚洲,武延鹏,程会艳
(北京控制工程研究所,北京 100190)
多探头星敏感器星图融合姿态确定精度
熊亚洲,武延鹏,程会艳
(北京控制工程研究所,北京 100190)
针对多探头星敏感器星图融合姿态确定精度问题做了研究。首先提出多探头星敏感器星图融合方法;其次在此基础上以三个探头为例,推导了三探头星敏感器星图融合姿态确定误差协方差矩阵公式;然后利用协方差椭球对该协方差矩阵的性质做了详细分析,明确了探头间构型、星图融合参考系选择以及各探头星点选取等因素对星图融合姿态确定精度的影响关系;仿真结果表明,最优构型的多探头星敏感器通过星图融合可输出同精度的三轴姿态,并且光轴精度较单探头星敏感器提升了30%。研究成果对多探头星敏感器的工程研制具有理论指导意义。
多探头星敏感器;星图融合;精度分析;协方差矩阵
星敏感器是目前各类航天器上精度最高的姿态测量器件[1],也是天文惯性组合导航系统的关键传感器。由于工作机理和结构的限制,传统星敏感器存在几个不足:一是其三轴姿态测量精度不一致[2];二是由于环境杂散光干扰导致无法连续地输出姿态。目前,航天器上普遍采用安装多个星敏感器的方式来克服上述缺点,该方式通过融合各个星敏感器的姿态来提高三轴姿态确定精度。但对于高精度姿态确定任务,这种多星敏感器组合模式在轨工作时,多个星敏感器与有效载荷间的安装误差以及各个星敏感器光轴间夹角的变化[3]等因素都严重限制了三轴姿态确定精度,使该方式难以满足更高精度姿态确定任务的需要。
多探头星敏感器利用单处理器处理来自多个探头的图像信息,通过合适的星图融合算法,在获取更高的姿态确定精度、更好的可靠性和更优的动态性能的同时,其成本、重量和功耗并没有显著增加。针对多探头星敏感器的相关研究中,文献[4]描述了HYDRA多探头星敏感器的主要设计思路、主要特征和性能参数;文献[5]基于各探头视场中的测量恒星均在同一个视场中的假设,对多探头星敏感器的结构布局进行了分析;文献[6]讨论了多探头星敏感器的快速星图识别算法。
在多探头星敏感器的研究中,数据融合方法和结构构型的确定至关重要。本文首先提出多探头星敏感器星图融合姿态确定方法;进而以三个探头为例,推导得出该融合方法的误差协方差矩阵并详细分析了该协方差矩阵的性质,同时指出影响融合精度的主要因素;最后辅以仿真试验校验上述分析的正确性。本文的研究成果对多探头星敏感器的工程研制具有理论指导意义。
1 多探头星敏感器星图融合姿态确定精度理论分析
1.1 星图融合姿态确定方法
多探头星敏感器根据探头间的构型关系将多个探头的星图数据转换到星图融合参考系,在参考系中结合适当的星点筛选策略选择测量星点,从而根据QUEST[7]算法计算三轴姿态。其星图融合过程如图1所示。

图1 三探头星敏感器星图融合示意图Fig.1 Star image fusion of three-head star tracker
图1中所示星图融合过程以探头1测量坐标系为星图融合姿态确定参考系,将探头2和探头3的星图数据根据探头间相对安装关系转换到探头1测量坐标系中,之后应用星图融合算法完成姿态解算。
对于多探头星敏感器星图融合姿态确定方法,受Wahba问题启发,其姿态确定损失函数取为

式中:N为探头数目;bni为星图融合后经星点筛选来自探头n中的第i颗恒星的单位测量矢量;rni为bni对应的恒星在惯性系下的单位矢量;Sn为探头n相对于多探头星敏感器星图融合姿态确定参考系的安装矩阵;ani为非负权重系数;A为所求姿态矩阵。
对于星上安装多个星敏感器的方式,其融合方法为姿态层面的融合,即融合各星敏感器独立输出的姿态。该方法本质上还是依赖单个星敏感器工作,未突破各探头之间相对独立的关系。与该方式相比,本文提出的多探头星敏感器星图融合方式考虑了各探头内测量恒星的选择关系,是一种更底层的融合策略,其优势在于:
1)提高了星敏感器的动态性能。在高动态情形若各探头星点数目不足3颗时,多星敏感器组合工作方式中各星敏感器无法输出姿态,但多探头星敏感器依然可以根据星图融合输出姿态。
2)提高了单星位置测量可信度。通过对比不同探头间的星点数据,结合星点具体指标和以往统计信息,提高单星位置可信度。
3)有效抑制了星敏感器与有效载荷间安装误差及星敏感器探头间夹角变化对数据融合精度的影响。多探头星敏感器一方面通过与有效载荷的一体化安装抑制安装误差变化影响,另一方面通过实时的探头间安装矩阵的校正算法提高融合精度。
1.2 星图融合姿态确定误差协方差矩阵公式
下面为分析方便,仅对三个探头的情况予以分析,即N=3。对于三个探头以上的情况,分析方法类似。
对于三探头星敏感器,整理式(1),得:

式中,

设由式(1)估计的姿态矩阵A的真值为Atrue,估计误差矩阵为δA,三者的关系为

令ξ为三探头星敏感器星图融合姿态估计值和姿态真实值之间的旋转误差向量,δA和ξ的关系为


结合式(2)(4)和(5),可得:

下面利用Fisher信息矩阵[8]对由QUEST法求解式(1)的结果进行协方差分析。
对于一个参数向量x,Fisher信息矩阵Fxx定义为

式中,L(x)为负对数似然函数。
利用Fisher信息矩阵分析误差协方差的原理是随着数据量的不断增大,参数向量x的Fisher信息矩阵渐近趋向于该参数估计误差协方差矩阵的逆,即:

Shuster在文献[9]中已经证明,对于Wahba问题,采用QUEST测量模型,当非负权重为权重系数a对应恒星的测量方差)时,Wahba问题与最大似然估计问题等价。
同理可知,对于三探头星敏感器,当式(1)中的权重系数取为式(10)时,利用QUEST算法求解三探头星敏感器姿态矩阵问题也等价于最大似然估计问题。

在式(10)的前提下,式(8)中的负对数似然函数也是此情况下的损失函数 J(A)。从误差向量ξ的角度描述 Fisher信息矩阵的表达式,结合式(7), L( x)取为损失函数 J(A)的等价形式 J(ξ),即:

将式(11)代入到式(8)中,对矩阵指数函数进行泰勒展开,同时注意到只有的二阶项起作用,得到Fisher信息矩阵为

根据式(3)和式(10)化简式(12)中的各项,可得:
根据式(13)结果,式(12)可写为

当考虑测量误差时,由于仅知道采样测量值(含误差)和姿态矩阵的估计值,而不知道观测量真值,不能直接应用式(14)。实际使用时可由测量值bni代替,这样就可以在无需计算姿态的情况下得到姿态估计误差协方差矩阵。为探头n中经星图融合星点筛选后选中的测量星点,令利用该星点由QUEST算法得到的探头n的姿态误差协方差矩阵为Pn。根据文献[7],式(14)可写为

于是得到三探头星敏感器星图融合姿态确定误差协方差矩阵为

对于N>3情况,推导方法与以上方法相同,则可得到多探头星敏感器星图融合姿态确定误差协方差矩阵的一般计算公式为

式(17)中的各Sn与各探头间的安装关系及姿态确定参考系的选择有关,因此,由式(17)可知,多探头星敏感器星图融合姿态确定精度与各探头间的相对安装关系、星图融合参考系的选择以及星图融合后星点筛选的星点分布直接相关。下面详细分析上述因素对多探头星敏感器星图融合姿态确定精度的影响关系。
1.3 星图融合姿态确定误差协方差矩阵性质分析
本节通过协方差椭球[10]对三探头星敏感器星图融合姿态误差协方差矩阵的性质进行研究,详细分析
1.2节所述各因素对融合精度的影响。
首先,定义协方差椭球:

对于任意的两协方差矩阵1P和2P,令二者关系如下:

则二者的逆在空间A关于L的二次型满足:

式(20)说明,较小协方差矩阵对应的协方差椭球包含在较大协方差矩阵对应的协方差椭球内。
在空间A中,信息矩阵-1P 关于向量L的二次型为

展开式(21),有:

由式(22)可知,融合的协方差椭球位于各探头协方差椭球的相交区域,如图2所示。
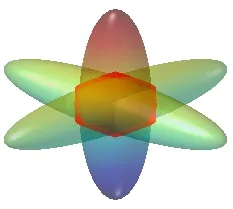
图2 融合协方差椭球与各探头协方差椭球关系Fig.2 Relationship between fusion covariance ellipsoid and each head covariance ellipsoid
由图2可知,融合的协方差椭球是三个探头协方差椭球公共区域的内切椭球,而此内切椭球的大小必定小于任意一个单探头协方差椭球。根据协方差椭球定义及上述论述,可得出多探头星敏感器星图融合姿态确定协方差矩阵的性质1和性质2。
性质 1:各探头筛选后的星点分布决定了各探头姿态确定协方差椭球的形状。三个单探头协方差椭球相交区域的内切椭球为融合协方差椭球,融合的三轴精度可由该椭球在空间A三个基轴xσ、yσ和zσ的投影长度所表达。
性质 2:无论采取何种构型以及如何选取姿态确定参考系,融合的三轴精度必定优于任何一个单探头对应的三轴精度。
由式(22)右侧可知,各探头测量坐标系到星图融合姿态确定参考系的正交变换将各探头的协方差椭球进行了旋转,探头间构型决定各探头协方差椭球之间的相对位置关系。当各探头的协方差椭球经旋转后,各自长轴为相互垂直关系时,其公共区域最小,融合的z轴精度最高。由此得到融合协方差矩阵的性质3。
性质 3:探头间构型决定了各探头协方差椭球的相对位置关系。三探头星敏感器无论选择何种构型以及何种星图融合参考系,当各探头协方差椭球长轴相互垂直时,融合的z轴精度最高。
选定探头间相对安装关系,对于两个不同的星图融合参考系,分别记为O1系和O2系。设O1系到O2系的转换矩阵为,各探头到O1系和O2系的转换矩阵分别为,两参考系下的融合协方差矩阵分别为,则的关系为

由于正定矩阵合同变换不改变迹,则对式(23)求迹,可知:

由式(24)可得融合协方差矩阵的性质4。
性质 4:当探头间相对安装关系选定后,不同星图融合参考系的选取不改变星图融合姿态误差协方差矩阵的迹。
由式(23)可知,星图融合参考系的选取不影响各探头协方差椭球的相对位置关系,一旦探头间安装构型确定,则融合的协方差椭球的形状随之确定,而不同的星图融合参考系表示的是该融合协方差椭球的旋转关系,结合性质1,可得星图融合协方差矩阵的性质5。
性质5:当探头间安装构型确定后,可通过星图融合参考系的选取,获得各轴期望的姿态确定精度分布。
上述性质1说明了星图融合后经星点筛选的各探头星点分布与最终融合精度的关系;性质2是三探头星敏感器星图融合的必然结果;性质3和5理清了探头间安装构型和星图融合姿态确定参考系对融合精度的影响。以上分析可为工程中多探头星敏感器探头间构型的确定和星图融合参考系的选择提供指导。
2 三探头星敏感器星图融合姿态确定精度仿真
2.1 坐标系定义
各探头的图像坐标系O-XYZ和测量坐标系o-xyz如图3所示。
图像坐标系O-XYZ:原点O为光轴与焦平面的交点,X轴与图像传感器行方向平行,Y轴与图像传感器列方向平行。

图3 探头图像坐标系和测量坐标系Fig.3 Imaging frame and measurement frame of optical head
探头测量坐标系o-xyz:原点o为探头的光学中心,x轴与图像传感器行方向平行,y轴与图像传感器列方向平行,z轴沿探头的光轴方向。
2.2 探头对称构型情况仿真过程与结果分析
由于各探头所测恒星位于不同天区,因此由筛选星点计算所得的各探头姿态确定精度一般不一致。仿真中设定三个探头的精度分别为各探头为对称构型。当星图融合姿态确定参考系分别选为探头1测量坐标系和探头3测量坐标系时,根据式(16)得出的理论分析结果分别如图4和图5所示。
由图4和图5可知,无论选取何种星图融合参考系,融合后的三轴精度均高于单探头的三轴精度;当探头间光轴夹角为 90°时,融合的z三轴精度最高;当探头间安装构型确定时,星点融合参考系的不同会导致三轴不同的精度分布。

图4 探头1测量坐标系下融合的姿态精度曲线Fig.4 Curves of fusion accuracies in head 1 measurement frame

图5 探头3测量坐标系下融合的姿态精度曲线Fig.5 Curves of fusion accuracies in head 3 measurement frame
理论上,星点融合参考系可以任意选取,然而多探头星敏感器在轨高精度测量对探头间相对安装关系的确定提出了较高要求,而探头间安装关系的校正与星点融合参考系的选择有关,不同参考系的选择决定了校正的难易与校正的精度。一般情况下,姿态确定参考系选为与某个探头的测量坐标系重合,具体选择哪个探头作为星点融合参考系还需根据实际任务的三轴精度分布要求做出选择。
下面通过仿真校验式(16)的结果,仿真中给定的星敏感器参数如表1所示,各探头为对称构型,星图融合参考系选为与探头1的测量坐标系重合。

表1 三探头星敏感器仿真参数Tab.1 Simulation parameters of three-head star tracker
基于表1数据仿真得到的星图融合姿态确定精度如图6所示。

图6 星图融合姿态确定精度与分离角关系Fig.6 Relationship between star-image fusion accuracy and optical head separate angle
仿真中各探头对应不同天区,各探头中被筛选的观测星的数目及其分布不同导致各探头协方差椭球形状有微小差别,从而导致了融合的x、y两轴精度具有轻微差别。上述仿真结果与式(16)符合较好,说明所做理论分析的正确性。
对于探头对称分布光轴相互垂直情形,基于表1数据分别仿真得到单头星敏感器和多头星敏感器三轴融合精度,结果如图7所示。

图7 精度对比Fig7 Accuracy comparison
将上述结果列于表2中,从中可以看出,最优构型的多探头星敏感器通过星图融合可输出同精度的三轴姿态,并且光轴精度较单探头星敏感器提升了30%。

表2 单探头星敏与多探头星敏精度对比Tab.2 Accuracy comparison between single-head star tracker and multiple star tracker
2.3 探头非对称构型情况仿真过程与结果分析
以上仿真分析针对的是探头对称构型情形。而对于具体的任务场景,由于某些条件的限制,多探头星敏感器的三个探头构型有可能不是对称的,下面就给出此种应用背景下的星点融合姿态确定精度仿真结果。
各探头据筛选星点计算的姿态精度如2.2节所示,选择探头1测量坐标系为星点融合参考系,探头1和探头2由于条件限制,两探头夹角为43°,探头3与其余探头间夹角相等,对于此非对称情形的星点融合姿态确定精度曲线如图8所示。

图8 各探头非对称构型时融合精度与分离角关系Fig.8 Relationship between fusion accuracy and optical head separate angle with asymmetric configuration
综合上述仿真分析可知:1)理论上探头间光轴相互垂直的构型是基于星图融合姿态确定方法的多探头星敏感器的最优构型,对于探头非对称构型情形,在满足其他限制条件的基础上,应使三个探头尽量分开,最大程度上满足测量不相关性;2)由于星点筛选会导致各探头星点数目及分布的差别,由各探头中筛选星点计算的各探头姿态精度会有差别,应合理选择星图融合参考系,以获得期望的融合三轴精度分布。
3 结 论
本文针对目前多个星敏感器组合工作的缺点,对新型的多探头星敏感器星图融合姿态确定精度做了分析。提出了多探头星敏感器星图融合姿态确定方法,在此基础上以三个探头为例,推导了三探头星敏感器星图融合姿态确定误差协方差矩阵公式,并对该协方差矩阵的性质做了详细的分析,明确了探头间构型、星图融合参考系的选择以及被筛选星点的分布等因素对多探头星敏感器星图融合姿态确定精度的影响关系。
具体结论如下:1)理论上各探头光轴夹角为90°时融合精度最高,而对于一般的探头非对称构型,在充分考虑具体任务限制条件情况下,应使各探头尽量分离,满足测量的最大不相关性;2)融合参考系的选择会影响三轴姿态精度分布,其一般选为在轨工作精度最高的探头测量坐标系,对于不同的三轴精度需求,可根据式(17)对融合参考系做出选择;3)星点筛选策略应保证各探头误差协方差椭球相交区域的最小化,结合星点能量、位置等多因素综合制定星点筛选方法。
本文所做分析对多探头星敏感器的工程研制具有理论指导意义。
(References):
[1]Sun T, Xing F, Wang X, et al. An accuracy measurement method for star trackers based on direct astronomic observation[J]. Scientific Reports, 2016(6): 22593.
[2]Chapel J, Stancliffe D, Bevacqua T, et al. Guidance, navigation, and control performance for the GOES-R spacecraft[J]. CEAS Space Journal, 2015, 7(2): 87-104.
[3]Enright J, Jovanovic I, Vaz B. On-orbit star tracker recalibration: A case study[C]//2015 IEEE Aerospace Conference. 2015: 1-13.
[4]Blarre L, Perrimon N, Piot D, et al. Hydra multiple heads star tracker with enhanced performances[C]//Proceedings of the 7th International ESA Conference on Guidance,Navigation & Control Systems. 2008: 2-5.
[5]王真, 魏新国, 张广军. 多视场星敏感器结构布局优化
[J]. 红外与激光工程, 2011, 40(12): 2469-2473.
Wang Zhen, Wei Xin-guo, Zhang Guang-jun. Structure optimization for multi-FOV star sensors[J]. Infrared &Laser Engineering, 2011, 40(12): 2469-2473.
[6]崔祥祥, 王宏力, 陆敬辉, 等. 基于公共星检验的改进球面多边形搜索星图识别算法[J]. 中国惯性技术学报,2014(3): 352-356.Cui Xiang-xiang, Wang Hong-li, Lu Jing-hui, et al.Modified spherical polygon search star identification algorithm based on common star checking[J]. Journal of Chinese Inertial Technology, 2014(3): 352-356.
[7]Shuster M D, S. D. O H. Three-axis attitude determination from vector observations[J]. Journal of Guidance Control & Dynamics, 1981, 4(1): 70-77.
[8]Kumar P R, Varaiya P. Stochastic systems: Estimation,identification, and adaptive control[M]. SIAM, 2015.
[9]Shuster M D. Maximum likelihood estimation of spacecraft attitude[J]. Journal of the Astronautical Sciences,1989, 37(1): 79-88.
[10]Ramasamy S, Sabatini R, Gardi A. Novel flight management system for improved safety and sustainability in the CNS+A context[C]//2015 Integrated Communication,Navigation and Surveillance Conference. IEEE, 2015:G3-1-G3-11.
Attitude determination accuracy of multi-head star tracker based on star-image fusion
XIONG Ya-zhou, WU Yan-peng, CHENG Hui-yan
(Beijing Institute of Control Engineering, Beijing 100190, China)
The attitude determination accuracy of a multiple-head star tracker is studied based on the star-image fusion. Firstly, a star-image fusion method with multiple-head star sensor is proposed. Based on the method, a star-image fusion covariance matrix of a three-head star tracker is derived. Then, the properties of the covariance matrix are analyzed by using a covariance ellipsoid, and the main influencing factors is figured out, which include optical head separate angle, star-image fusion reference frame and the star points chosen by star-image fusion. Simulation results show that the multiple-head star tracker with optimal structure allows full accuracy on all axes based on the proposed star-image fusion method, and the attitude determination performance is increased by 30% compared with single-head star tracker. The research results lay a theoretical foundation for the engineering development of the multiple-head star tracker.
multi-head star tracker; star-image fusion; accuracy analysis; covariance matrix
V448.2
A
1005-6734(2016)05-0612-07
10.13695/j.cnki.12-1222/o3.2016.05.010
2016-06-22;
2016-09-02
国家重大科学仪器设备开发专项(2013YQ310799)
熊亚洲(1992—),男,硕士研究生,从事光学成像敏感器方面的研究。E-mail: xiongyazhou_bice@163.com
联 系 人:武延鹏(1977—),男,研究员,主要从事光学成像敏感器方面的研究。E-mail: wuyanpeng@gmail.com
