基于MEMS惯性传感器的人体多运动模式识别
2016-12-23路永乐
路永乐,张 欣,龚 爽,周 帆,刘 宇
(重庆邮电大学 光电信息感测与传输技术重庆市重点实验室,重庆 400065)
基于MEMS惯性传感器的人体多运动模式识别
路永乐,张 欣,龚 爽,周 帆,刘 宇
(重庆邮电大学 光电信息感测与传输技术重庆市重点实验室,重庆 400065)
针对人体多运动模式识别中识别精度低的问题,提出一种基于MEMS惯性传感器的人体多运动模式识别算法。该算法选取MEMS加速度传感器的时域特征作为模式识别特征量,提取MEMS角速度传感器的时域特征作为二次识别的特征量,能够准确识别走、跑、站立、上楼、下楼、趴倒、躺倒、倒退多种运动模式。识别过程采用分层识别算法,同时使用支持向量机识别区分难度较大的两类行为动作。嵌入式消防单兵定位系统平台的实验验证表明,利用该算法能够识别消防单兵的多运动模式,平均识别精度达到94%以上。
MEMS惯性传感器;运动模式;识别算法;时域特征
人体运动模式识别是指对人体多种运动状态的识别过程,主要是通过分析惯性传感器的数据,从而识别运动模式。运动模式识别技术广泛应用于竞技体育、健康检测、医学研究和行人导航等领域[1-4]。近年来,也被应用在一些救援工作中[5]。文献[6]将加速度计置于腰部和大腿,利用小波变换分析散步、慢跑和躺下等姿态,对比了实验结果与视频记录,表明加速度计的数据可以用来识别人体姿态。文献[7]提出加速度计置于腕部的识别算法,对比分析了腕部和臀部的人体行为模式的识别结果。文献[8]将传感器运动节点置于前右髋,基于压缩感知和稀疏表示理论提出一种新的人体行为识别框架。文献[9]利用决策树和逻辑回归技术提出一种新的基于机器分类学习的预测模型,跑和坐等识别结果较好,但是上下楼识别结果不是很好。文献[10]分析了置于足部和肩部两个惯性测量单元的数据,实现室内行人导航。文献[11]采用多个传感器置于身体的不同位置,提出一种适用于可穿戴式传感器平台的分类识别算法,其精度高于单个传感器的识别精度。
本文选取加速度计时域特征作为识别站立、跑、趴倒和躺倒等运动模式的特征量,对于较难区分的走、倒退、上楼和下楼等运动模式,利用MEMS角速度传感器的时域特征量进行二次识别,提取最优的特征量进行多种动作的分类识别。该算法与基于频域、小波变换提取的特征识别相比[12-13],复杂度小,功耗低,且该算法识别效果较好,能够识别站立、走、跑、上楼、下楼、趴倒、躺倒和倒退等多种运动模式。
1 系统框架
本文采用分层识别算法和支持向量机进行多种模式的识别,将待识别的运动模式分为二类:一类是常见的运动行为,即站立、走、跑、上楼和下楼;另一类是针对消防单兵的作战行为,即趴倒、躺倒和倒退。
本文选择支持向量机的分类方法识别走、上楼和下楼等区分难度较大的模式。对于传统的一对一方法的支持向量机分类算法,假设有M种待识别的模式,则需要构建 M(M-1)/2个分类器,本文采用基于分层识别算法的支持向量机进行M种模式的识别,则最多需要构建M/2个分类器,改善了支持向量机学习的复杂程度。分类器的构建如下所示:

式中:s和t是两类模式样本的类别号。通过解决此优化问题,得到下面的决策函数模型:

本文的算法框图如图1所示。首先对采集到的传感器数据滤波处理;然后分别计算加速度传感器和角速度传感器用于运动模式识别的时域特征,经过对提取的特征进行对比分析;最终提取的时域特征包括加速度传感器的方差、四分位距和峰值,角速度传感器的均值、方差和偏度。

图1 算法框图Fig.1 Algorithm frame
本文根据时域特征对多种行为模式分层识别,分别是站立,走、倒退、跑、上楼和下楼,趴倒和躺倒。在对走、倒退、上楼和下楼识别时,采用基于分层识别算法的支持向量机进行多种模式的识别,减少了分类器的个数,降低了分类算法的复杂度。分层识别算法如图2所示。

图2 分层识别算法Fig.2 Hierarchical recognition algorithm
2 数据采集和预处理
本文采用型号为ADXL001的MEMS加速度传感器和型号为SRM202的MEMS角速度传感器集成的消防单兵定位装置采集测试人员多运动模式的数据,将其放置于测试人员的腰部(紧贴脊椎),如图3所示。佩戴时令传感器的Z轴与地面垂直反向,X轴指向人体运动的前进方向,Y轴与地面平行,符合右手笛卡尔坐标系。
由于人体日常活动的频率在20 Hz左右,本文设计的人体运动信息采集装置,传感器的采集频率设置为 50 Hz,采集到的传感器数据对于区分多种运动模式提供了完整的识别特征,适合的数据采集频率可以减少数据传输及运算对系统实时性的影响。

图3 消防单兵定位装置佩戴方式示意图Fig.3 Wear mode of fire fighting positioning device
为了提取运动传感器的时域特征,需要对传感器的原始数据作滤波处理,去除原始信号中的噪声和毛刺。本文使用中值滤波和平滑滤波对数据进行预处理,每5个数据点进行一次中值滤波处理,设x1,x2…xn是传感器数据x的一个样本,平滑滤波的数学模型为

如图4所示,预处理后的信号更加平滑,适合提取运动传感器的时域特征。
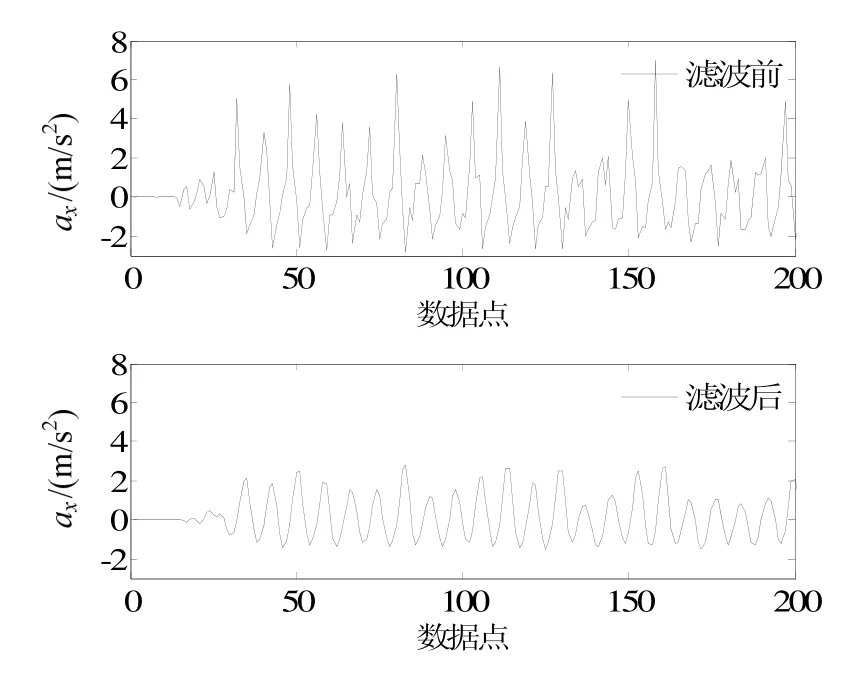
图4 数据预处理前后的对比图Fig.4 Comparison on data before and after preprocessing
3 特征提取
在惯性测量单元采集的三轴 MEMS加速度传感器信号和三轴MEMS角速度传感器信号中,每一轴数据都能提取出不同的特征量。特征提取对于多运动模式识别的精度有很大的影响。时域特征的提取计算复杂度低,耗时较短,本文最终选取适用于实时性要求较高的系统的多种时域特征。
3.1 加速度传感器时域特征的提取
3.1.1 方 差
方差即数据偏离平均值的程度,方差越大,说明数据的偏离程度越大,即测试人员进行行为模式的动作范围较大。在对数据的波动性进行描述时,方差和标准差的作用是相同的,但是标准差需要对方差进行开根号,运算量较方差大。合加速度为三轴加速度的标量和,较单个轴的数据稳定,且不会受传感器佩戴方式的限制,所以本文采用合加速度方差来进行站立和跑步的识别。合加速度公式如下所示:

式中:A为三轴加速度的合加速度;ax、ay、az分别为加速度计三轴数据。
设x1,x2…xn是角速度传感器数据x的一个样本,方差公式如下式所示:x为样本n次观测值的平均数。

3.1.2 四分位间距
四分位间距也是用来衡量信号变化强度的特征之一,它不受异常信号和峰值的影响。将加速度计x轴的数据ax从小到大排列为把
式中:Var为方差;均分为四份,四分位间距为第三四分位数和第一四分位数的差值,计算公式如下式所示:

式中:IQR为四分位间距;Q1为第一四分位数;Q3为第三四分位数。
3.1.3 峰值
峰值用来描述信号在一个周期内变化的强度,有正有负,峰值越大,运动的幅度越大。加速度计三轴的峰值大小分别代表测试人员在前、后、左、右不同方向的运动情况,测试人员前向趴倒的瞬间,加速度计x轴的峰值数据大于日常模式的数据,并且可以根据加速度计的三个轴向峰值的变化情况来识别测试人员具体的摔倒方式。峰值计算较简单,且能够真实反映测试人员的行为模式,本文采用峰值作为识别趴倒和躺倒的特征量。
本文选取 MEMS加速度传感器的方差作为识别跑步和站立的特征量。图5为多种模式下方差的分布,跑步的方差远大于其他模式的方差,站立的方差几乎为0,方差能够准确识别跑步和站立。图5中横坐标为窗口数,定义每50个数据点划分为一个窗口,模拟实时情况下的数据处理。

图5 方差的分布情况Fig.5 Distribution of variances
对于区分难度较大的走、上楼和下楼,四分位间距的重合部分较小,能够作为识别走和上下楼的特征。四分位间距的分布情况如图6所示。

图6 四分位间距的分布情况Fig.6 Distribution of interquartiles
识别走和后退时,模值和四分位间距重合度较大,不能作为识别的特征参数,本文选用加速度计x轴的峰值大小作为识别走和后退的特征。测试人员由静止到前向行走时,峰值为正;测试人员由静止到后向倒退时,峰值为负。走和倒退时的峰值分布如图7所示。

图7 走和后退的时域特征Fig.7 Time domain features of walking and backward walking
本文选取加速度计x轴的峰值作为识别趴倒和躺倒的特征向量。人体在跌倒过程中,姿态变化明显,瞬间加速度变化较大。趴倒时x轴的峰值瞬间变化约为g,设置识别趴倒的阈值大于-5 m/s2;躺倒时x轴的峰值瞬间变化约为-g,设置识别躺倒的阈值小于-5 m/s2。趴倒和躺倒时的峰值分布如图8所示。

图8 趴倒和躺倒的时域特征Fig.8 Time domain features of forward falls and backward falls
3.2 角速度传感器时域特征的提取
3.2.1 均值
均值是反映一组数据变化强度的一项指标,它的优点在于能够充分利用数据的特征,且计算简单,计算量较小,不足之处在于容易受极端数据的影响。均值公式如下式所示:

式中:M为均值;n为样本个数;xi为样本数据。
3.2.2 偏度


图9 均值的分布情况Fig.9 Distribution of mean values

图10 方差的分布情况Fig.10 Distribution of variances

图11 偏度的分布情况Fig.11 Distribution of skewness values
式(7)中:kS为偏度;xi为样本观测值;n为样本个数;为样本n次观测值的平均值;ds为样本标准差。
针对走、上楼和下楼识别难度大的问题,本文在选取加速度四分位间距作为特征参数的同时,采用角速度传感器的均值、方差和偏度作为二次识别的特征参数。如图 9~11所示,走的均值和方差大于上楼和下楼的均值和方差,上楼的偏度大于下楼的偏度。
4 实验结果与分析
为了获取更客观的多种运动模式的特征数据,本实验共有20名测试人员,其中12名男性,8名女性。每位测试人员完成8种类型的运动模式,分别为:站立、走、跑、上楼、下楼、趴倒、躺倒和倒退。20名测试人员于2016年5月15日在重庆邮电大学第一教学楼和第七教学楼,完成以下实验,在实验过程中,对测试人员的行为不做任何约束,测试人员均按照各自的行为习惯完成不同的动作,对于走、跑等模式,不规定先出左脚还是右脚。
本文进行两组对比实验:第一组实验采用单一的加速度传感器采集人体多运动模式的信息作为运动模式识别的数据;第二组实验采用加速度传感器和角速度传感器融合后的运动信息作为运动模式识别的数据,分别在嵌入式单兵消防定位系统平台上实验验证。实验结果如表1~4所示。识别率的定义为
识别率=(正确检测次数/实验总数)×100% .
表1列出了8种运动模式的识别精度。由于站立与其它几种动作的区分度较大,所以识别精度为100%;上、下楼和走的区分度较小,识别精度较低;对于趴倒和躺倒等模式也会出现误识别的情况。

表1 第一组实验结果Tab.1 Results of the first experiments
表2列出了测试人员进行7种运动模式的混淆情况,上、下楼易于误识别为走及后退,趴倒和躺倒误识别为跑。
第二组实验采用加速度传感器和角速度传感器融合后的信息作为多运动模式识别的数据,表3和表4列出了第二组实验的结果。与第一组实验的识别结果相比,对于较难区分的上楼和下楼,识别精度分别提高了9%和7%,后退的识别精度提高了6%。

表2 第一组实验中7种运动模式的混淆矩阵Tab.2 Confusion matrix of seven kinds of motion patterns in the first set of experiments

表3 第二组实验结果Tab.3 Results of the second set of experiments

表4 第二组实验中7种行为类别的混淆矩阵Tab.4 Confusion matrix of seven kinds of motion patterns in the second set of experiments
由表1和表3可知,采用单一的加速度传感器识别多种运动模式时,能够识别多种行为模式,平均识别精度为 90.1%,其中上下楼的识别精度较低,融合了角速度传感器特征参数的平均识别精度为 94.3%。与单一的加速度传感器识别相比,平均识别精度提高了4.2%,识别结果较好。
5 结 论
本文融合MEMS加速度传感器和MEMS角速度传感器数据的特征量,识别走、倒退、上楼、下楼和趴倒、躺倒等多种人体运动模式。通过基于嵌入式单兵消防定位系统的平台进行实验验证,对比单一加速度传感器与本文多运动传感器的识别结果。结果表明,本文的识别算法精度比 MEMS加速度传感器的识别精度提高4.2%,平均识别精度为94.3%。实验过程中只需佩戴一个消防单兵定位装置,操作简单,具有较好的工程应用价值。
(References):
[1]Özdemir A T, Barshan B. Detecting falls with wearable sensors using machine learning techniques[J]. Sensors,2014, 14(6): 10691-10708.
[2]Attal F, Mohammed S, Dedabrishvili M, et al. Physical human activity recognition using wearable sensors[J].Sensors, 2015, 15(12): 31314-31338.
[3]钱伟行, 曾庆化, 万骏炜, 等. 基于人体下肢运动学机理的行人导航方法[J]. 中国惯性技术学报, 2015, 23(1):24-28.Qian W X, Zeng Q H, Wan J W, et al. Pedestrian navigation method based on kinematic mechanism of human lower limb[J]. Journal of Chinese Inertial Technology,2015, 23(1): 24-28.
[4]Zhang X X, Rong Z, Guo M F, et al. Yaw error self-observation algorithm for pedestrian navigation via foot-mounted inertial navigation system[J]. Journal of Chinese Inertial Technology, 2015, 23(4): 457-466.
[5]Chen Y J, Lin C Y, Wang L C. Sensors-assisted rescue service architecture in mobile cloud computing[C]//Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC). 2013: 4457-4462.
[6]Lugade V, Fortune E, Morrow M, et al. Validity of using tri-axial accelerometers to measure human movement—Part I: Posture and movement detection[J]. Medical Engineering & Physics, 2014, 36(2): 169-176.
[7]Trost S G, Zheng Y, Wong W K. Machine learning for activity recognition: hip versus wrist data[J]. Physiological measurement, 2014, 35(11): 2183.
[8]Zhang M, Sawchuk A A. Human daily activity recognition with sparse representation using wearable sensors[J]. IEEE Journal of Biomedical and Health Informatics,2013, 17(3): 553-560.
[9]Catal C, Tufekci S, Pirmit E, et al. On the use of ensemble of classifiers for accelerometer-based activity recognition[J]. Applied Soft Computing, 2015, 46(C): 1018-1022.
[10]Yuan X, Chen X Y, Li Q H, et al. Indoor pedestrian navigation using two low-cost IMU-based framework [J].Zhongguo Guanxing Jishu Xuebao/journal of Chinese Inertial Technology, 2015, 23(6): 714-717.
[11]Gao L, Bourke A K, Nelson J. Evaluation of accelerometer based multi-sensor versus single-sensor activity recognition systems[J]. Medical Engineering & Physics,2014, 36(6): 779-85.
[12]Jiang J, Jiang T, Zhai S. A novel recognition system for human activity based on wavelet packet and support vector machine optimized by improved adaptive genetic algorithm[J]. Physical Communication, 2014, 13: 211-220.
[13]Nam Y, Park J W. Child activity recognition based on cooperative fusion model of a triaxial accelerometer and a barometric pressure sensor[J]. IEEE Journal of Biomedical and Health Informatics, 2013, 17(2): 420-426.
Recognition of multiple human motion patterns based on MEMS inertial sensors
LU Yong-le, ZHANG Xin, GONG Shuang, ZHOU Fan, LIU Yu
(Chongqing Municipal Level Key Laboratory of Photo-electronic Information Sensing and Transmitting Technology,Chongqing University of Posts and Telecommunications, Chongqing 400065, China)
A recognition algorithm for multiple human motion patterns based on MEMS inertia sensors was proposed for the problem of low accuracy of pattern recognition in recognizing multiple human motion patterns. Time domain features of a MEMS acceleration sensor were selected as the features of pattern recognition. Time domain features of the MEMS gyroscope were adopted as the features of secondary recognition. The algorithm can accurately identify various movement patterns, including walking, running,standing, upstairs, downstairs, forward falls, backward falls and backward walking. A layering recognition algorithm was used in the recognition process. A support vector machine was trained to recognize such two types of motion patterns as they were difficult to distinguish. The experiments based on the platform of the embedded fire soldier positioning system show that the recognition algorithm can recognize multiple motion patterns of fire soldiers, and the average accuracy is above 94%.
MEMS inertia sensors; motion pattern; recognition algorithm; time domain features
TP391.4
A
1005-6734(2016)05-0589-06
10.13695/j.cnki.12-1222/o3.2016.05.006
2016-06-21;
2016-09-21
国家自然科学基金资助项目(51175535);国际联合研究中心科技平台与基地建设(cstc2014gjhz0038);重庆市基础与前沿研究计划项目(cstc2015jcyjBX0068);重庆邮电大学博士启动基金(A2015-40);重庆邮电大学自然科学基金(A2015-49)
路永乐(1985—),男,讲师,博士,主要从事惯性导航技术研究。E-mail: luyl@cqupt.edu.cn
联 系 人:刘宇(1972—),男,教授,主要从事惯性导航技术研究。E-mail: liuyu@cqupt.edu.cn
