基于MEMS的帕金森病震颤实时评估系统*
2016-11-30郄剑文贾方秀鲁鹏威
郄剑文,贾方秀,鲁鹏威
(南京理工大学 智能弹药技术国防重点学科实验室,江苏 南京 210094)
基于MEMS的帕金森病震颤实时评估系统*
郄剑文,贾方秀,鲁鹏威
(南京理工大学 智能弹药技术国防重点学科实验室,江苏 南京 210094)
针对如何全面、客观地提取出帕金森病人震颤信息的问题,构建了一套基于MEMS惯性传感器的帕金森病震颤实时分类与量化评估系统。将3组惯性传感器单元(IMU)分别固定在被测对象的大腿、胸腔和手腕上,上位机中基于LabVIEW平台设计特定的算法实现对4种特定人体姿态的识别及震颤信号的分析,提取特征参数。设计了二叉决策树特征分类器,利用特征信号对分类器进行特征训练。算法验证试验结果表明,系统针对4种特定人体姿态和两种震颤状态具有较高的识别率,震颤评估参数具有一定的合理性,能够辅助医生给出更加客观的诊断结论。
震颤评估;帕金森病;MEMS;分类器设计
0 引言
帕金森病(Parkinson Disease,PD)发病率高居世界第二,震颤是其最主要的临床症状之一[1],分为静止性震颤和动作性震颤。目前,判断帕金森病人产生震颤的类型以及其严重程度的方法主要依靠医生通过统一帕金森病评分量表(UPDRS)评分,评估的准确度仍然依赖于医生的经验和主观判断,缺乏量化指标。因此,建立一套客观科学的帕金森病震颤评估系统具有重要的意义。在国外,出现了基于计算机视觉、压力测试以及惯性器件的帕金森病诊断系统。基于计算机视觉的诊断系统很容易受到外界和内部因素的影响[2-4],基于压力传感器的诊断系统只能实现病患与健康者的鉴别[5],无法实现实时监控与评估。而德国的 K.Niazmand等人设计了基于加速度计的“帕金森病诊断智能服”[6],实现了对于帕金森病人震颤的评估,但操作过程相对复杂。本文提出了基于MEMS惯性器件的帕金森病震颤实时评估系统的主要组成模块和功能。通过识别4种特定的人体姿态,实现了对于震颤特征信号的提取以及对于震颤的评估。算法试验结果表明,系统对于4种姿态具有较高的识别率且震颤量化评估参数有一定的合理性。
1 系统设计
由于帕金森病震颤主要发生于上肢、下肢和躯干处,则设置被测对象分别在手腕、胸腔和大腿上穿戴3个基于MEMS的惯性传感器单元,各个传感器单元敏感轴的指向如图1所示。该系统惯性传感器单元中选用InvenSense公司的MPU6050三轴加速度计和陀螺仪传感器。该传感器将测得的数据传输给发送端,经接收端接收后传输至上位机,以实现原始信号的采集。该系统无线发送及接收端均选用NORDIC公司NRF24L01无线6通道收发芯片,其工作在2.5 GHz世界通用ISM频段。将每一个惯性传感器单元都安装在独立的壳体中,在其内部完成原始动态数据的测量与采集,各个子系统单元之间互不影响,并通过各自无线通信传输至接收端,避免了传感器之间的硬件连接,提高了系统的稳定性。

图1 震颤监测系统示意图
本系统以Cortex-M3内核的32位微处理器为核心,选用STM32F103RE型号。图2所示是惯性传感器单元的原理框图,文献[7]中对帕金森病人震颤进行了分析,文中认为该类型号的频率在4 Hz~12 Hz。在被测对象佩戴惯性单元时,可以认为惯性传感器与被测对象频率是一样的,所以编辑程序将加速度计测量范围置为±8 g、采样率置为1 000 Hz、分辨率置为4 096 LSB/g。陀螺仪量程为+1 000°/s、采样率为1 000 Hz、分辨率为32.8 LSB/°/S。
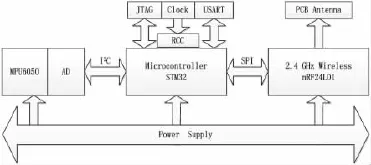
图2 惯性单元原理框图
上述参数的值及量程可以达到系统的测量要求,并且拥有较低的能耗。惯性加速度计和陀螺仪测到的信号通过I2C总线到达MCU,并加载后续算法对原始信号进行滤波。MCU把处理算法得到的数据利用SPI总线传到无线收发芯片发送端并通过ISM频段发送给芯片接收端,设置无线接收芯片为三数据通道并通过串口发送给上位机软件完成原始数据的采集。使用无线数据传输的方式可以实时地把采集到的惯性加速度计和陀螺仪数据传输到上位机中,以便在算法试验中能够同时把系统得到的姿态与人为观察的结果作对比,将试验结果更加直观地展现出来。
2 特征信号提取及分析
2.1数据预处理
惯性加速度计和陀螺仪传感器均用 100 Hz的采样频率实现数据采集、处理和存储。为了降低信号中测量噪声的比例,需要对惯性传感器的原始测量数据进行一系列信号处理。原始数据预处理分为下述两个步骤:首先,惯性器件测量得到的加速度信号内有一定的奇异点,为了尽量去掉原始信号内奇异点,编写程序使惯性元件输出的加速度信号进行低通数字滤波处理,加速度计频带宽度设置为184 Hz,陀螺仪设置为188 Hz;第二,考虑到震颤信号传输过程中会耦合进入不必要的高频噪声,而休息性震颤信号频带在 4 Hz~6 Hz之间,动作性震颤信号频带在3.5 Hz~12 Hz之间。为了消除信号中存在的高频噪声,本系统上位机LabVIEW程序中分别编写相应的带通滤波器以将原始震颤信号中包含的外界高频环境噪声去除。
2.24种特定人体姿态特征分析
帕金森病人震颤类型分为静止性震颤和动作性震颤,而震颤多发生于上肢、下肢和躯干处。据此定义4种特定的人体姿态:“站立上肢无动作”、“站立上肢有动作”、“坐上肢无动作”和“坐上肢有动作”,在动态识别 4种姿态的基础上,进一步进行震颤的提取和分类。
为了判断人体上肢是否有动作,本文采用了人类日常动作识别领域内相对较常用且复杂度较低的评定算法 SMA(Signal Magnitude Area)[8],算法定义为:

式(1)中:ax、ay和 az分别表示手腕处惯性单元的 X、Y和Z 3个敏感轴的加速度信号输出值。为了提高判断的准确度,同时提取采集时间节点内上肢倾斜角度的变化值AC作第二个判断条件,参数计算公式定义为:

式中Wz为手腕处角速度输出值。静止与动作状态手腕处特征参数曲线如图3所示。

图3 静止与动作状态手腕处特征参数曲线
“站”与“坐”姿态大腿处特征参数曲线如图4所示。为了判断被测对象是“站”姿态还是“坐”姿态,按照图中大腿处惯性单元各轴的指向,通过公式解出其Z轴与自然坐标系Z轴夹角,定义为

3 分类器设计
经过多次针对给定人体姿态和震颤类别的特征信号提取试验,利用上文介绍的人体姿态与震颤特征信号提取算法,本文选取了5个特征参数用于设计分类器,如表1所示。据二叉决策树思想设计了本系统的目标分类器,分类器参数由特征参数和一定的偏差量组成,偏差量大小的选取在一定程度上会影响分类器的性能。分类算法的流程图如图5所示。
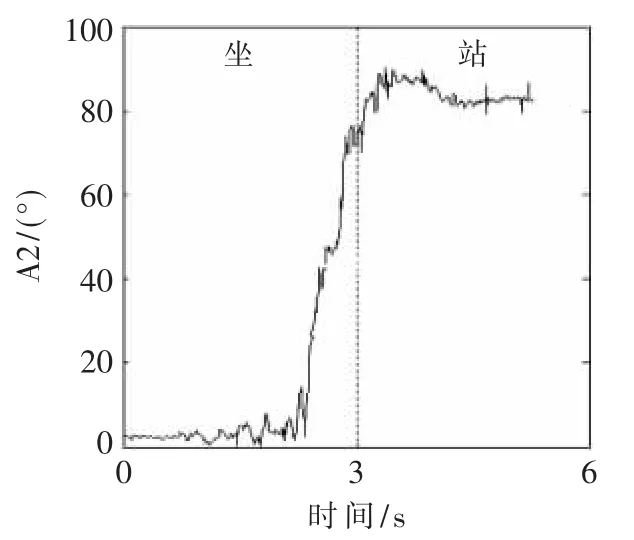
图4 “站”与“坐”姿态大腿处特征参数曲线

表1 分类器参数

图5 分类算法流程图
4 量化评估算法
休息性震颤信息提取过程中,通过窗函数标记可确定震颤周期起始和终止的时间,对标记有震颤发生的数据进行时域处理,计算加速度数据的均方根,记为I (Intensity),发生相应震颤的持续时间记为 T,则休息性震颤的严重程度RTS(Rest-Tremor-Severity)定义为:

将敏感轴y轴参数记为Y_RTS,震颤参数的具体量化通过试验确定。
动作性震颤严重程度 MTS(Move-Tremor-Severity)通过观察到运动震颤所占整个运动时间的百分比来实现,定义为:

式中t为动作震颤发生的时间,T为运动的总时间。震颤评估算法实现如图6所示。

图6 震颤评估算法流程图
5 试验验证
为了验证数据处理算法中阈值参数及分类算法中特征参数选取的合理性,评估本文提出的人体姿态分类算法和震颤量化算法的正确性。进行了对于4种特定人体姿态和上肢震颤类型的判定以及震颤评估试验。在上位机LabVIEW平台上将分类算法以G语言的形式写入到人体姿态及震颤分类评估系统中,进行多次试验并按照所得结果统计正确识别的次数,并分析系统的识别率。在相同环境条件下,重复进行 30次试验。IMU模块及试验图如图7所示。
由表2可以得知分类系统对于特定姿态识别表现出了良好的识别性能。对于震颤的分类识别,在30次试验中均有少数的错误识别。静止性震颤的错误识别均表现为:将静止性震颤识别为无震颤;动作性震颤的错误识别均表现为:将动作性震颤识别为静止性震颤。分析原因是由于参数所选取的阈值并不合适,可以通过大量的样本数据来训练优化阈值参数,从而减少识别误差。试验结果可以看出对于静止性轻微震颤和静止性明显震颤,震颤量化参数RTS的均值有明显的变化,反映了量化参数与震颤剧烈程度的映射关系,同时验证了静止性震颤量化参数的选取是合理的。

图7 IMU模块及试验图

表2 试验结果
6 结论
本文利用MEMS惯性器件搭建了一套帕金森病震颤实时分类评估系统,同时验证了人体姿态识别与震颤评估算法。试验结果表明,该系统能够在识别特定人体姿态的基础上实时地分类和量化震颤信息,以达到辅助医生客观得给出临床诊断结论的目的。
[1]EROLA T.Deep brain stimulation of the subthalamic nucleus: A clinical study,in Medica.2015,Acta Universitatis Ouluensis.
[2]CHAO C W,CHAO W H,LI S H,et al.A vision-based analysis system for gait recognition in patients with Parkinson′s disease,Expert Systems with Applications,2009,36(3):7033-7039.
[3]Li Shancang,Wang Jue,Wang Xinheng.A novel gait recognition analysis system based on body sensor networks for patients with parkinson′s disease.IEEE Geobecom 2010 Workshop on Advanced Sensor Integration Technology:256-260.
[4]Samarjit Das,Laura Trutoiu,Akihiko Murai.Quantitative measurement of motor symptoms in parkinson′s Disease:A Study with Full-body Motion Capture Data.33rd Annual International Conference of the IEEE EMBS Boston,Massachusetts USA,August 30-September 3,2011:6789-6792.
[5]BAMBI R B,SUJATA P,GEORGE C,et al.Application of modified regression techniques to a quantitative assessment for the motor signs of parkinson′s Disease.IEEE Transactions on Neural Systems and Rehabilitation Engineering,2009,17 (6):568-575.
[6]NIAZMAND K,TONN K,KALARAS A,et al.A measurement device for motion analysis of patients with Parkinson′s disease using sensor based smart clothes.2011 5th International Conference on Pervasive Computing Technologies for Healthcare(PervasiveHealth)and Workshops,2011:9-16.
[7]DEUSCHL G,BAIN P,BRIN M.Consensus statement of the movement disorder society on tremor.Movement Disorders,1998,13:2-23.
[8]王建平,焦国太,刘彩花.智能封锁雷自修复策略研究[J].科学技术与工程,2013,13(3):588-592.
A real-time system based on MEMS to evaluate tremor in Parkinson′s disease
Qie Jianwen,Jia Fangxiu,Lu Pengwei
(Ministerial Key Laboratory of Intelligent Ammunition,Nanjing University of Science and Technology,Nanjing 210094,China)
In order to extract the tremor information comprehensively in patients with Parkinson′s disease and assist doctors to give more scientific clinical diagnosis conclusion,a real-time system based on MEMS to aid clinical classification and quantification of tremor in Parkinson’s disease is established.Three sets of Inertial Measurement Units(IMU)are proposed to be fixed on the object's thigh,chest and wrist.A series of algorithms based on LabVIEW platform in the computer are introduced to identify four kinds of human gestures,achieve the analysis of the tremor signal and extract the character parameters.These parameters are used to design and train a binary decision tree classifier.The algorithm verification test shows that the system has good recognition rate for static posture and tremor type and the tremor evaluation parameters are reasonable.
tremor evaluation;Parkinson′s disease;MEMS;classifier design
TN492
A
10.16157/j.issn.0258-7998.2016.02.011
国家自然科学基金(61201391)
(2015-10-13)(
2015-05-17)
郄剑文(1992-),通信作者,男,硕士,主要研究方向:无线传感器网络技术,E-mail:qiejianwen55@163.com。
贾方秀(1980-),女,工学博士,讲师,主要研究方向:MEMS惯性传感器电路设计、IMU姿态测量。
鲁鹏威(1993-),男,硕士,主要研究方向:模式识别技术。
中文引用格式:郄剑文,贾方秀,鲁鹏威.基于MEMS的帕金森病震颤实时评估系统[J].电子技术应用,2016,42(2):42-45.
英文引用格式:Qie Jianwen,Jia Fangxiu,Lu Pengwei.A real-time system based on MEMS to evaluate tremor in Parkinson′s disease[J].Application of Electronic Technique,2016,42(2):42-45.
