主动脉冲转向的横摆稳定性分析与试验研究
2016-11-30张宝珍阿米尔谢晖黄晶
张宝珍+阿米尔+谢晖+黄晶
摘 要:提出了一种后轮脉冲主动转向控制策略,运用脉冲信号作为控制器输出的后轮主动转向控制方法,对此做了理论分析和试验研究.首先,设计了产生脉冲信号的液压系统,并分析了此系统的运行对悬架参数和车辆稳态和瞬态响应的影响;分析不同脉冲参数(频率,振幅)对车辆横摆运动的影响并确定最优的脉冲参数.其次,综合跟随理想横摆角速度和抑制汽车质心侧偏角的方法,提出了控制策略与算法;运用基于CarSim 和Simulink的联合仿真方法,分析此系统对汽车横摆稳定性能的影响;最后,安装液压脉冲发生器进行整车试验研究,验证仿真结果的可信性,并评价后轮脉冲转向的实用性.仿真和试验结果表明:后轮脉冲主动转向能够有效的跟踪横摆角速度和质心侧偏角提高车辆的横摆稳定性,同时可以减少质心侧倾角和侧向加速度,提高汽车的操纵稳定性.
关键词:稳定性;后轮主动脉冲转向控制;车辆动力学;横摆控制;整车试验
中图分类号:U467.1 文献标识码:A
文章编号:1674-2974(2016)10-0032-10
Abstract:The analysis and test of a rear wheel pulsed active steering control strategy was proposed. First, the effect of installation and operation of hydraulic pulse actuator on the suspension parameters and the improvement of the vehicle's steady and transient state response due to the control of active pulse were investigated. Second, a full vehicle model of a SUV equipped with the steering actuator was built in Carsim and co-simulated with Simulink as the control module.The structure of control strategy considering yaw rate error and side-slip angle error was designed to improve the stability and path. Finally, a whole test bed was designed and assembled for a SUV to carry out road experiments with different maneuvers to validate the results obtained from the simulations and to assess the applicability of the pulsed active steering system. Simulation and test results have indicated that considerable improvement in the yaw stability control can be achieved. Meanwhile, the rear wheel pulse active controller can reduce the lateral acceleration and the roll angle.
Key words: stability; rear wheel pulse active steering; vehicle dynamics; yaw stability control; full vehicle test
随着汽车拥有量的逐渐增加和行驶速度的不断提高,道路交通安全已经成为当今世界一个严重的社会问题.如何通过先进的结构设计及有效地控制技术来提高车辆动力学特性,从而改善其转向过程的动态响应特性,路径跟踪性能以及对不同道路条件的适应性,最终获得良好的车辆操控性和行驶稳定性便成为目前车辆动力学及控制领域研究的重要方向.目前主动控制技术主要有:主动/半主动悬架控制,直接横摆力矩控制(DYC),主动转向控制,联合控制等.主动/半主动悬架通过调整悬架阻尼特性,可以一定程度的提高汽车的行驶稳定性[1-2],但是,主动悬架结构复杂,成本高,对舒适性有一定的影响,限制了其使用.DYC是利用分配不等的制动力给各个车轮,由此产生横摆力矩来控制车辆稳定性的方法[3],B.C.Chen等利用ABS实现了差动制动系统防侧翻控制[4],然而,直接横摆力矩控制有一定的局限性,在轮胎两侧路面的附着系数不一样的情况下,效果受到了很大的限制[5].主动转向技术是一种可以有效控制汽车横摆运动和侧倾运动的方法,包括主动前轮转向控制和四轮转向控制[6-7].但是由于转向轮转向角度的变化,同时改变了驾驶员的驾驶意图,从而改变了汽车的理想轨迹.为了满足不同行驶路况的要求,可以联合多种控制措施进行综合控制[8],这样就可以充分利用各种措施的优点,弥补每种控制的不足.但以上几种主动控制技术都有自己的缺陷与特定适应条件,基于以上不足,提出了一种新的主动转向技术来改善车辆的横摆运动:后轮脉冲主动转向.Kuo[9]和Abdel-Rahman[10]把脉冲转向技术运用到前轮主动控制,分析了脉冲信号对汽车横摆和侧倾的影响,取得了不错的效果,但也产生了对汽车制动和驾驶员的干扰.
本文以SUV车辆为研究对象,设计了液压脉冲转向系统,建立了车辆横摆和侧倾模型,分析后轮主动脉冲转向对车辆横摆稳态和瞬态的影响;设计了后轮主动脉冲转向(RWAPS)控制策略与算法,分析脉冲幅值和频率对车辆横摆性能的影响,并确定其最优值;运用Simulink和CarSim进行联合仿真,验证RWAPS的有效性与可信性;设计制造了液压脉冲发生装置并安装在SUV试验车进行了试验研究,验证RWAPS方法的有效性与适用性.
1 车辆与脉冲发生器模型的建立
1.1 车辆横摆和侧倾模型
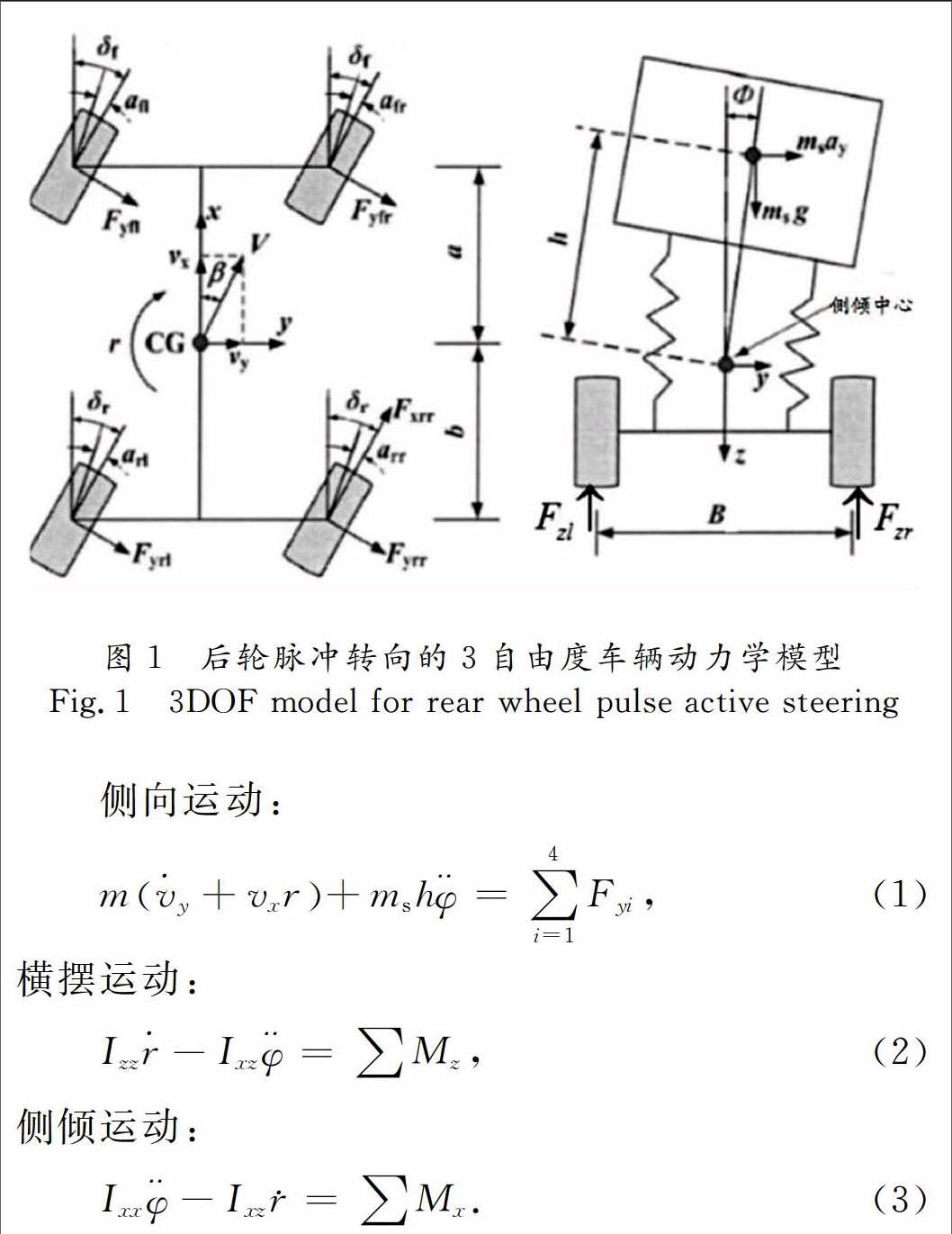
车辆行驶状态下的动力学模型是研究车辆横摆控制的基础.根据车辆坐标系,对SUV车辆建立三自由度车辆动力学模型[11],此模型具有较好的精度,描述了汽车的横向运动和侧倾运动,以汽车的前轮和后轮转角为输入.汽车的结构参数及受力运动定义如图1所示,其微分方程如下:
1.2 SUV多连杆后悬架ADAMS模型
为了分析液压脉冲发生装置执行机构的运动对悬架参数的影响,建立了基于试验的SUV样车的多连杆后悬架ADA MS模型,所测得的悬架硬点参数如表1所示,由此建立的ADAMS后悬架模型如图2所示.
1.3 液压脉冲发生器设计与建模
液压脉冲发生系统的执行机构安装在多连杆悬架的连杆上用来产生后轮脉冲转向,如图2中点13.本小节介绍的液压系统的设计和建模,可为后续的仿真和试验做准备.在此系统中,液压油被输送到执行机构中推动后轮进行转向,其油量的大小和运动方向由驱动电机控制的液压阀的转速和转向决定,驱动电机运动由控制单元的控制算法决定,如图3所示.此液压机械脉冲转向系统可以看成由液压传递部分和液压缸执行部分组成.
从图4和图5可以看出,活塞位移的变化可以明显改变车辆的稳态横摆速度增益和车辆侧倾角增益,提高车辆的稳态转向性能.本文运用此方法来控制实际车辆来跟随理想的横摆角速度和质心侧偏角,同时减少车辆的侧倾角提高车辆的操纵稳定性.
2.2 车辆瞬态特性分析
对方程(9)进行拉氏变换,可得到横摆角速度和质心侧偏角对活塞位移的传递函数,如方程(11)所示:
频率响应分析衡量了系统输出与输入的一种动态特性关系,此文中用来衡量活塞运动频率对车辆横摆参数的影响,如图6中的横摆角速度和质心侧偏角的频率响应,运用此种方法来选择最优的活塞运动频率,进而选择最优的电机运转频率,提高车辆的横摆运动的控制水平.
3 控制系统的结构与设计
3.1 后轮脉冲转向控制的策略
后轮脉冲转向控制策略(Rear Wheel Pulse Active Steering, RWPAS),运用脉冲转向信号来调整车辆的运动状态,通过后轮主动脉冲转向来达到控制汽车稳定性的目的,系统控制器根据系统的误差来确定其是否激活控制信号,其转向控制信号是脉冲式的,类似于ABS中的制动力控制,如图7所示.
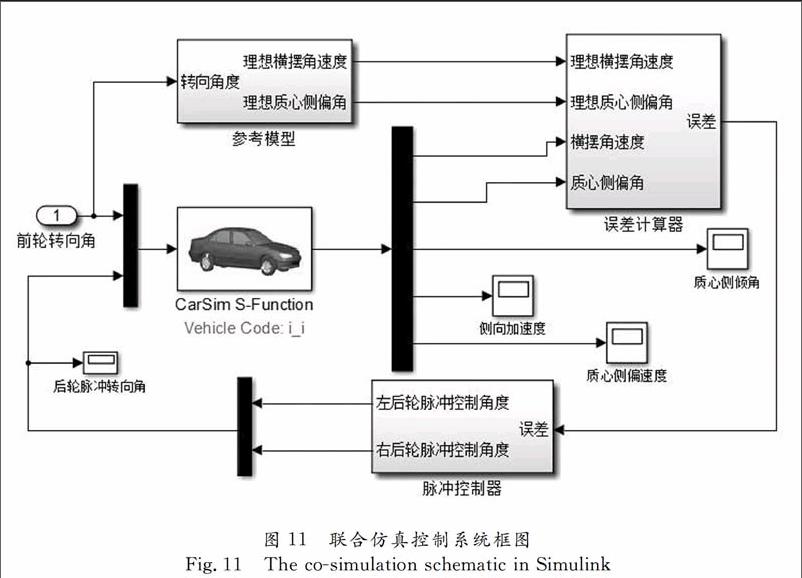
驾驶员控制汽车的转向角度和车速,把这两个参数输入到被控车辆和理想参考模型中,计算出横摆角速度,质心侧偏角,侧倾角度等参数,然后输入到误差评估器,计算此时的误差,通过误差的大小由控制器来控制脉冲发生器的启闭.
3.2 横摆控制目标选择
车辆的质心侧偏角和横摆角速度是车横摆控制的两个重要参数.文献[12]阐述横摆控制主要有3种方式:质心侧偏角控制,横摆角速度控制,综合控制.此文选取质心侧偏角和横摆角速度为控制目标来跟踪理想的参考值,来提高车辆的侧向稳定性和操纵性能,其理想的参考值如方程(12)所示:
3.3 控制器的控制算法
后轮脉冲转向控制算法如图8所示,通过计算实际车辆参数与理想参数误差的大小,来决定脉冲发生器的启闭.如果误差在设计的阀值安全范围之内,那么算法就会输出“0”即脉冲发生器不被激活;如果误差超过了设定的阀值,那么算法就会根据误差大小来激活一个预订的幅值和频率的脉冲,激活脉冲发生器使后轮产生一个脉冲主动转向角,来控制车辆的运动,如果误差仍然超出阀值,那么就产生一系列的脉冲信号来控制后轮进行脉冲转向,直到误差控制在理想的范围之内.值得一提的是,一旦脉冲发生器启动,那么至少要产生一个完整的脉冲信号周期或者一系列的脉冲转向周期,这样让后轮停止主动转向时回到正常的初始位置,即转角为零的位置.
4 脉冲参数的分析与设计
脉冲信号的信息主要包括脉冲形式,幅值,频率3个基本的参数,其不同的脉冲参数会对系统的控制有不同的影响,本节分析不同脉冲参数的影响,并确定其最优值.
4.1 转向脉冲形式的选择
为了设计一定形式的后轮脉冲转向信号,脉冲信号的表达形式必须在仿真和试验运用过程中都是合理的而且其幅值和频率是容易调节的,在本文的研究中,其脉冲信号选用标准正弦脉冲信号,其幅值和频率可以方便的通过控制驱动电机的转速和转向来实现,其方程表达式如下:
4.2 转向脉冲频率分析与优选
选用正弦脉冲信号并固定脉冲幅值,在阶跃转向工况条件下,车辆每次仿真中的脉冲频率分别为1 Hz, 2 Hz, 3 Hz, 4 Hz和5 Hz,通过此仿真分析不同脉冲频率对车辆横摆性能的影响,仿真结果如图9所示.
从仿真结果图9可以看出,不同的频率对横摆参数有不同的影响,随着频率的不断增大,其对控制指标的影响随之增大,但频率到达一定值时,其影响会随之减少.最优频率可以根据2.2节中的频率响应分析确定,最优的脉冲频率为幅值增益最大时,所对应的角频率的值,选定为3 Hz.
4.3 转向脉冲幅值分析与优选
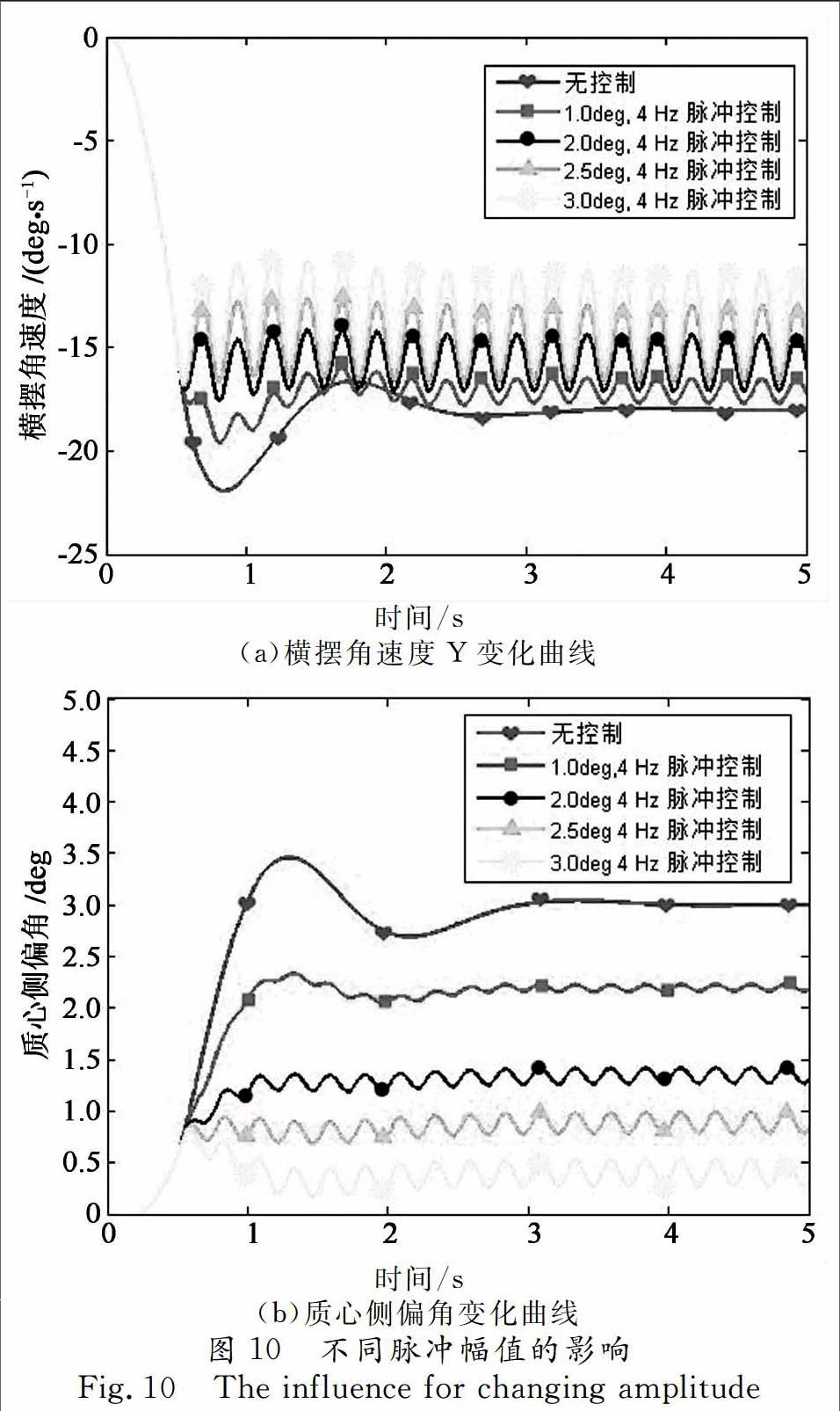
固定正弦脉冲信号的频率为4 Hz,车辆在阶跃转向工况仿真中,其幅值分别为1.0 deg, 2.0 deg, 2.5 deg和3.0 deg, 通过此仿真分析不同脉冲频率对车辆横摆性能的影响,仿真结果如图10所示.
从仿真结果图10可以看出,随之幅值的增大,其横摆速度和质心侧偏角的减少量会随之增加,及幅值越大对横摆参数的影响也就越大,但本文中用驱动电机来产生脉冲转向,当转向脉冲幅值增大时,需要更大的驱动力来驱动转向,就需要更大功率的电机,所需的转向机械功率如下:
式中:Mz为转向后轮绕Z方向的力矩,δrt为设计的转向后轮的脉冲信号.考虑实际试验中电机安装空间和尺寸的限制以及轮胎侧向力的非线性特性,本文选定最优的脉冲幅值为2.0度.
