基于信道拥塞代价计算的车联网自适应消息发送速率控制方法
2016-11-24刘明剑谭国真李帅兵丁男宋彩霞
刘明剑,谭国真,李帅兵,丁男,宋彩霞,2
(1. 大连理工大学计算机与科学技术学院,辽宁 大连 116024;2. 青岛农业大学理学与信息科学学院,山东 青岛 266109)
基于信道拥塞代价计算的车联网自适应消息发送速率控制方法
刘明剑1,谭国真1,李帅兵1,丁男1,宋彩霞1,2
(1. 大连理工大学计算机与科学技术学院,辽宁 大连 116024;2. 青岛农业大学理学与信息科学学院,山东 青岛 266109)
在VANET中,车流量密度的变化以及Beacon消息的发送对信道负载具有直接影响,车流量达到一定程度时会造成信道拥塞,导致协作式安全应用失效。针对该问题,设计了一个基于信道拥塞检测的自适应消息发送速率控制方法。首先,建立一个能精确反映当前信道状态的干扰模型;其次,根据香农信息理论和网络效用最大化理论计算出当前节点在物理层的最优发送速率;最后通过对消息队列的实时监控,根据传输速率的不匹配和传输队列长度的不匹配建立下一时刻信道拥塞程度的代价函数,来自适应调整下一时刻的消息产生率,避免信道拥塞和队列溢出。通过仿真实验表明,该方案以较低的计算时间开销,有效减少通信传输延时,避免信道拥塞,保证数据的可靠发送。
车联网;拥塞控制;效用;消息发送速率控制
1 引言
车联网作为目前世界道路交通领域的研究前沿之一,能有效避免交通碰撞、减少能源消耗、提高路网通行能力,是智能交通系统的重要分支,也是解决城市交通问题的有效手段。然而,由于交通环境中车辆拓扑结构快速变化的特性,复杂的交通环境以及地理特性对无线通信过程的影响,均会产生较大的通信干扰,导致链路中断。而动态变化的交通流特性更造成了信道负载的频繁变化,已有相关学者进行了研究,交通流密度每10 s就会进行一次改变,而这种改变对通信过程所产生的威胁也不容忽视。
文献[1~4]研究表明,当道路上交通流密度达到一定规模时,进行交通感知的周期性 Beacon消息也会使无线信道达到饱和。而这些 Beacon消息是VANET安全应用中节点相互感知、智能协作和检测潜在危险和碰撞的基本消息,不能丢弃或者延缓传输。为了确保其传输的实时性和可靠性,在有限的信道容量约束和交通密度动态变化的情况下,只能通过减少其传输频率来减少信道负载,保证通信性能。基于上述需求,一些学者已经开展了此方面的研究。
Rezaei等[5]提出根据准确度的需求来调节信标生成率,当车辆真实值和评估值的差值超过最大偏移阈值时,车辆才发送周期性 Beacon消息,降低消息发送频率,减少信道的负载。Khorakhun等[6]提出了一种基于反馈环路的控制策略,它将车辆本身所检测的信道繁忙时间作为评价通信性能的指标,根据该指标来自适应调整广播速率。Huang等[7]提出了速率自适应算法,去分布式地控制每个车辆的自身消息的广播行为,在不同的交通流密度下,更能保证精确和稳定的追踪性能。Bansal等[8]针对车联网中稠密交通流环境所导致的信道拥塞问题,提出了依赖于可用信道,完全精确地控制输入速率方法,结果显示该方法能收敛到公平并且最优的信道利用率。Drigo等[9]提出了一种分布式、轻量级的拥塞控制算法(DRCV),该算法监控信道利用,并且评估信道的负载。当信道负载大于一定的阈值时,则采用快速分组丢失的方式丢弃数据分组,该算法能显著增加数据分组的接收概率和信道利用率。Wang等[10]针对高频率的发送速率在高交通流密度下所产生的信道拥塞问题,基于模糊逻辑理论提出了一个高效的信标速率控制方案。Lun等[11]针对高交通流密度场景下,固定信标速率所引起的严重的信道拥塞和较低的消息成功接收率等问题,基于该马尔可夫模型提出了一个优化消息发送速率的方案,来最大化消息递送率,缓解信道拥塞问题。
虽然上述研究能够在一定程度上减少信道负载,避免信道拥塞,但仍存在一些不足:1) 主要是基于通信需求来进行自适应速率控制,而没有考虑应用需求来满足消息广播的公平性:2) 现有的拥塞控制算法主要是通过检测信道利用率、信道繁忙时间和当前时刻节点数目,当其值超过一定阈值之后进行相应的自适应控制操作,仅仅是一种粗略的分段被动控制方法,不能保证控制精度,其只能在发生拥塞之后来疏解拥塞状态,不能提前调整传输参数避免信道拥塞的发生,而且进行拥塞疏散也需要消耗一定的时间进行恢复,所以导致控制过程具有滞后性,不能避免信道拥塞。
本文针对上述研究中存在的问题,提出了基于信道拥塞代价计算的自适应消息发送速率控制方法。首先,建立能够精确地反映信道状态的干扰模型;其次,建立DSRC网络控制信道的效用函数,并计算得到效用最大化时的物理层发送速率;再次,根据传输速率的不匹配和传输队列长度的不匹配来建立下一时刻信道拥塞代价;最后,根据拥塞代价建立消息产生率模型,来自适应调整下一时刻的消息产生率,从而达到维持高的信道利用率,微小的损耗和低排队延迟的目的。
2 基于信道拥塞的自适应消息发送速率控制方法
基于信道拥塞检测的自适应消息发送速率控制方法本质上是一种跨层优化方法[12],工作在应用层、MAC层和物理层,系统模型如图1所示。1) 应用层统计车辆节点数目、车辆相对位置关系,根据上述信息,计算物理层此时最大发送速率,进而对应用层产生消息速率进行调整;2) MAC层是对队列长度的监控和进出队操作、拥塞代价计算和消息产生率计算;3) 物理层主要用于包括干扰值的计算和信噪比计算。
3 信道拥塞代价预测机制
3.1 通信干扰计算
由 Friss公式,无线通信过程中的接收信号功率计算模型,即接收节点的信号强度如下
其中,Gt和Gr分别为发送节点和接收节点的天线增益,ht和hr分别为发送节点和接收节点的天线高度,本文假设发送节点和接收节点的天线增益、天线高度都相等。为节点i的发送功率,为接收节点j的接收功率,L为系统损耗,一般k∈[2,4],本文中取定值4。
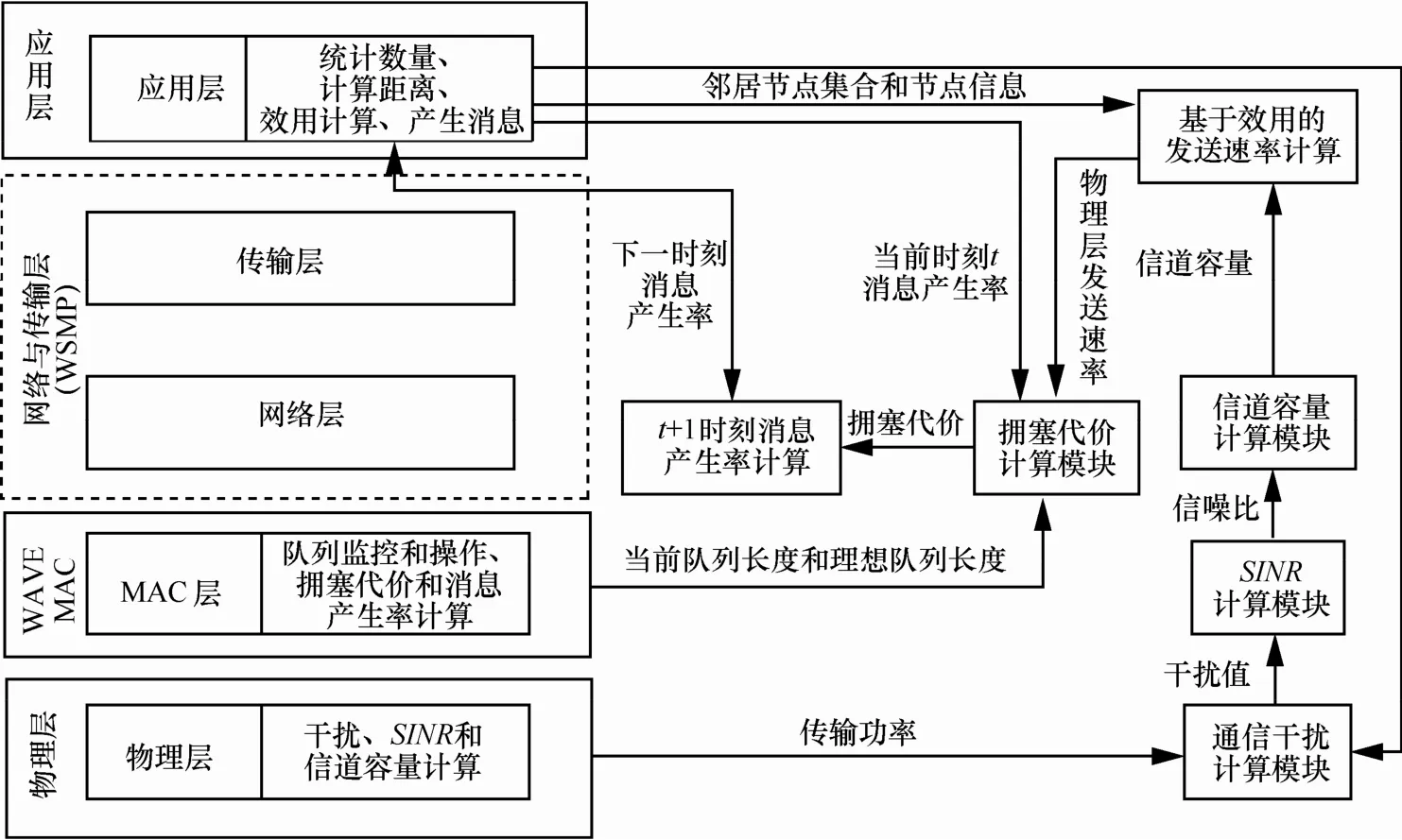
图1系统模型
随着车辆节点之间传输距离的增加,无线信号的路径衰减也越来越严重。车辆只有当信号强度超过接收天线的灵敏度γ时,才能成功解析并接收该消息。故通信范围的计算模型如式(2)所示。
其中,tP为发送功率,γ为干扰增益,α为衰减因子。
载波侦听范围是接收节点能感知到无线信号,并能成功解析PLCP帧头的最大范围,通常用节点的 CCA模块来感知信号功率是否超过物理载波感知门限,如果超过该门限,则发送信号的节点位于载波侦听范围内。其计算模型为

其中,Pcs为物理载波感知门限。
通过上述2个计算模型能够确定DSRC网络中节点的通信范围和载波侦听范围。因此,当所有车辆传输功率固定时,车辆j能成功接收并解析车辆i所发送的无线信号集合,即通信范围内的节点集合为

车辆j能成功探测到车辆i所发送无线信号的车辆i的集合,即载波侦听范围内的节点集合为

车辆j能成功探测探测到车辆i所发送无线信号的PLCP帧头,但不能成功解析该信号的车辆i的集合,即范围为[dcr,dsr]内的的干扰节点集合为

通信范围内的干扰。通信范围内多个车辆节点同时发送消息,但由于这些车辆节点发送消息处于同一个时间戳内,彼此之间会产生信道争用,此时只有一个车辆节点能够竞争到信道使用权,与目标车辆节点进行通信,其他车辆节点则可认为是干扰节点。目标车辆节点能够成功接收解析范围任何车辆发送的无线电波,并可获知车辆节点之间的相对速度和距离。通信范围干扰计算式如下

通信范围之外的干扰。在范围[dcr,dsr]内的干扰,车辆发送节点发送的无线电波,由于无线链路的衰减,信号功率太弱,低于可接收最小信噪比,导致车辆接收节点只能感知但无法解析,接收车辆节点无法估算出车辆节点间相对速度和距离,因此,这些信号便成了噪声,虽然这些信号无法被解析,但叠加到一起达到一定规模仍会对通信产生干扰。由于无法估算节点之间的相对距离,可以用通信距离和载波侦听距离的平均值来代替,通信范围外的干扰计算式如下
3.2 SINR计算
信噪比SINR的计算式[13]如下

其中,Interferencej为 t时刻车辆接收节点的干扰值,Noise为信道噪声。
在DSRC所在的5.9 GHz的无线通信频段中,外界物理环境对其影响基本可以忽略不计,然而车辆接收节点的天线的噪声对 SINR有显著的影响,噪声对通信质量的影响与设备相关,只要保证设备可靠性就可以降低噪声对通信的影响,因此,接收节点的信号强度和干扰就成为影响通信质量的关键因素,热噪声公式如下

式(10)中,信道带宽用B表示,T0为大气层温度,K=1.38×10−23。假设T0=300K(等于26.85),B=10 MHz ,则VANET中的热噪声是 −104 dBm 。
3.3 基于效用的发送速率策略
在本节中基于文献[14,15]给出了Internet中针对拥塞控制问题中采用的网络效用给出的最大化理论,建立关于物理层发送速率的最优化效用函数,其中,把每个车辆接收节点 j与车辆发送节点 i认为是Internet中的一条链路,这些链路组成一个网络,建立效用函数,ri则为节点i数据流的传输速率,因此,整个网络的效用之和为
通过建立的效用函数来求解无线网络物理层的最大传输速率。然而在求解过程中,仍要面临着约束条件的限制,在本文中,约束条件为当前DSRC网络下的信道容量,所有链路发送速率之和均不能超过这个限制。文献[16]中,Fallah等通过实验发现,当信道占有率达到70%时可以达到最大的吞吐量,使网络性能最优。本文将信道负载限制为信道容量的70%,以达到最优的网络性能。因此,在约束条件中所需要的信道负载门限为

综上所述,本文所建立的DSRC网络控制信道的效用最大化问题可以表述为


在应用层通过收发节点的相对速度和相对距离所建立的效用函数中,vij为发送节点i与接收节点j之间的相对行驶速度,vth为设定的最小正速度值,因为车辆在行驶过程中存在相向运动,此时vij为负值,因此定义了车辆速度的取值distij为发送节点i与接收节点j之间的相对距离。
DSRC网络效用最大化的问题是一个关于传输速率、受限于信道容量的最优化问题,为了简化求解过程,而将其转化为对偶问题

则对偶问题D的目标函数为

其中,拉格朗日乘子λ是无线链路的拥塞系数。
因此,针对所建立的DSRC网络效用最大化问题的拉格朗日函数为

所描述的对偶问题的最终目标函数为


把拉格朗日乘子jλ看作节点j的信道拥塞价格,所以上述算法就是通过调节拉格朗日乘子jλ来达到控制信道拥塞的目的。则上述的对偶问题D是一个无约束、非线性规划问题,本文通过梯度下降法[18]来求解该对偶问题的代价调整过程,所求得的节点j的拥塞代价的调整模型如下
其中,n为梯度下降法的迭代步数,Kλ是求解过程中的迭代步长,[z ]+=max{0,z} ,则整个局部网络的控制信道的总拥塞代价为

因此,根据库恩—塔克定理[19],然后迭代计算可以得出节点i物理层的传输速率为

通过上述计算过程,可求出每个节点的最优物理层发送速率,只要车辆的物理层发送速率满足这个要求,即可满足通信需求。但是这个速率仅仅是输出速率,也就是出队列的速率,而应用层和物理层之间的是一个生产者与消费者的关系,如果生产者不知道消费能力而盲目生产许多产品,最终会由于仓库无法存放而不得不丢弃。所以接下来的工作就要是通过队列缓冲中的数据长度和输出速率之间的差值来自适应调整消息产生率,保证不会由于盲目的生产而导致队列溢出。
4 信道拥塞代价计算
拥塞控制是解决网络中资源分配不平衡问题的有效手段,2001年,Athuraliya[20]提出了指数随机标识算法,是一种基于数据流检测的主动队列管理方法,该算法起初是用于Internet上的TCP拥塞控制,但该算法引入了经济学“价格”的思想,基于实际市场中的供求关系,通过价格进行有效调节,因此,可以借助上述思想能够对DSRC网络的拥塞控制进行指导。
该算法通过现在网络状态来预测下一时刻的网络拥塞情况,根据拥塞成本丢弃部分数据分组,从而达到降低网络拥塞的目标,其成本主要由以下方面所决定:1) 物理层在t周期的发送速率,与应用层的消息产生率之间的差值;2) 当前实际队列长度与所期望的队列长度之间的差值,利用市场供求关系的思想,基于“价格”来对上述2种差值进行调节,保证子层消息生产率和物理层发送速率进行有效匹配,使缓冲区维持在 0,从而达到降低通信延迟,消除拥塞,防止队列的溢出导致的分组丢失保证通信通畅的目的。
利用上述算法思想,对于车辆节点i而言,基于t周期的拥塞价格,可以预测t+1周期的拥塞价格为

其中,常数γi控制着该方法对网络情况的敏感度(γi>0),θi为消息产生率,消息队列的长度,为队列的理想的长度,a是一个很小的常数,i每个节点需要单独进行设置,该常数的设置其实是在队列利用率和队列延迟之间进行权衡。当权重ai是正数时,价格随着速率和队列长度的失配而增加。
5 消息发送速率自适应调整
通过对车辆节点信道拥塞情况的评估,及此时拥塞价格来对消息生产率进行调节,确保信号处于一个相对稳定状态。消息产生率以指数形式表现,比较能够精确反映车辆自组织网中这种相对节点密度高的大规模无线网络,设置t+1时刻车辆节点i消息产生率为

其中,R为信号没有发生拥塞情况下,应用层的消息产生率,在车辆自组织网中,交叉路调度等安全应用中,R取值为10 packet/s。
6 实验结果与分析
6.1 实验条件设定
本文通过使用网络仿真器 NS3对所提出的自适应消息发送速率方法的性能进行验证。在仿真过程中,采用802.11p无线通信协议,仿真中车辆状态消息(车辆位置、速度和方向等)以25 dBm发射功率进行广播。交通流密度从 0 vehicle/km,逐渐提升至 200 vehicle/km。实验设计为当交通流密度变化时,对设计的自适应速率控制策略性能进行验证。当交通系统中的车辆密度增多时,也就是区域内频繁发送信标帧车辆的数量增多情况下,车辆节点通信会发生相互干扰情况,影响信道容量。针对上述问题,实验设计中结合应用需求的效用函数会计算出交通流密度改变后发送节点的最优发送速率。信道拥塞代价计算模块和自适应速率调整模块根据也会重新调整应用层的消息产生率。上述过程迭代进行即可避免车联网通信过程中的信道拥塞,保证协作式安全应用对数据分组递送率和延迟需求,同时考虑消息广播公平性,从而克服现有拥塞控制方法的滞后性和不精确性。
实验中通过本文设计自适应消息发送速率控制算法(PARCM)与线性消息自适应速率控制策略LIMERIC 算法[21]、固定发送速率(2 packet/s、5 packet/s和10 packet/s)进行对比,来对本文提出自适应速率控制算法性能进行验证,对比的性能指标有数据分组递送率PDR、信道占有率、传输延时、2种自适应速率控制策略调整结果、优化过程的迭代过程和目标函数结果。
仿真参数设置如表1所示。

表1仿真参数
6.2 实验结果及分析
1) 信道占用率
安全应用中,随着车流量密度增加,区域内频繁发送信标帧车辆的数量相应也增加情况下,本文的自适应消息发送速率方法(PARCM),与固定速率(2 packet/s、5 packet/s、10 packet/s)和 LIMERIC算法,在信道占用率进行对比,观察对信道负载产生的影响。如图2所示,车流量密度增加,上述算法信道占用率均增加,固定速率10 packet/s增长最为迅速,在200 vehicle/km节点处,信道占用率达到 100%,本文的 PARCM 算法、LIMERIC算法在交通流密度在170 vehicle/km节点之前,信道占用率高于固定速率5 packet/s,当超过170 vehicle/km节点,占用率成明显下降趋势,并且本文PARCM算法相对LIMERIC算法信道占用率更低。
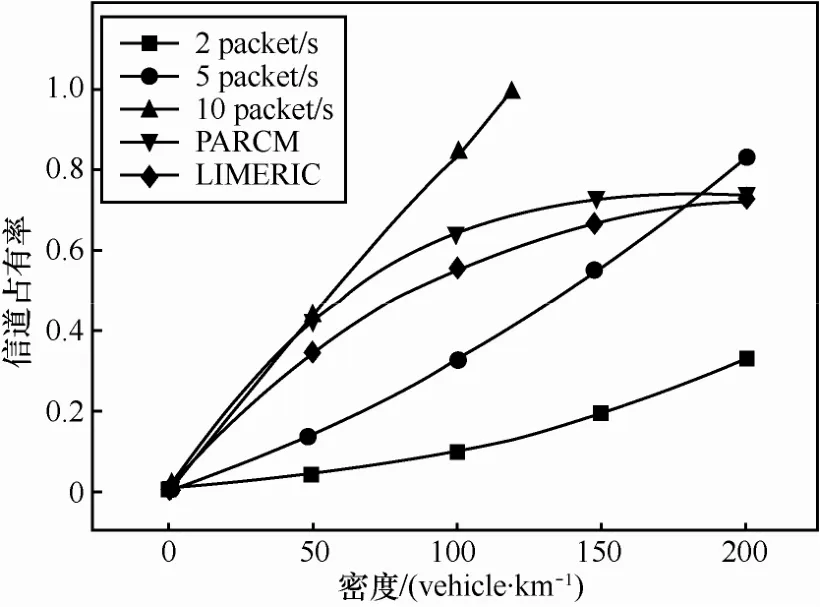
图2不同控制策略所对应的信道占有率
2) 消息产生率
图 3所示为随着车流量密度不断增加,本文PARCM算法和LIMERIC算法消息产生率的变化情况,LIMERIC算法因为信道容量制约,在此过程中,消息产生率明显低于本文 PARCM 算法。本文的PARCM 算法能够根据车辆的通信环境,计算得出可利用的信道资源,再根据应用层安全应用需求对消息产生率进行自适应调整,避免拥塞造成安全应用失效问题,保证较高消息产生率,来保证车辆及时接收周围车辆状态信息,进而保证应用可靠性。

图3消息产生率
3) 平均消息传输延时
随着车流量流密度增加,5种算法的消息平均传输延时均呈递增趋势,如图4所示,当超过80 vehicle/km节点时,固定速率10 packet/s的平均传输延时将显著提升,超过其他算法,当达到200 vehicle/km节点时,平均消息传输延时超过180 ms。而本文提出的PARCM算法,在节点120 vehicle/km之后传输延时将低于除了固定速率2 packet/s的其他算法。虽然固定速率2 packet/s在不同交通流密度情况下,传输延时均在20 ms之下,然而2 packet/s发送周期,使车辆更新周围车辆信息时间过慢,致使安全应用由于消息更新不及时导致失效。本文提出 PARCM方法是通过队列的长度差和传输速率差来自适应调整发送速率,综合性能好于其他算法。
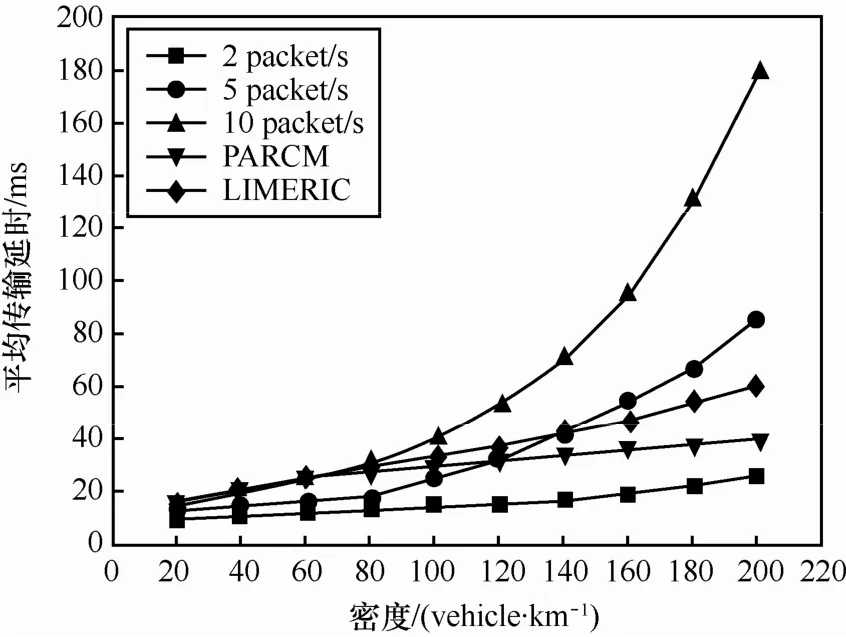
图4不同控制策略所对应的平均消息延时
4) 数据分组递送率
图5中,随着交通流密度增加,数据分组递送率PDR均呈下降趋势,其中,固定速率10 packet/s下降趋势最为明显:固定速率5 packet/s,随着交通流密度增大,PDR下降至 50%,均不满足要求,PARCM方法和LIMERIC以及固定速率2 packet/s均可以满足要求,保证PDR大于90%,并且本文PARCM算法性能略优于LIMERIC算法。
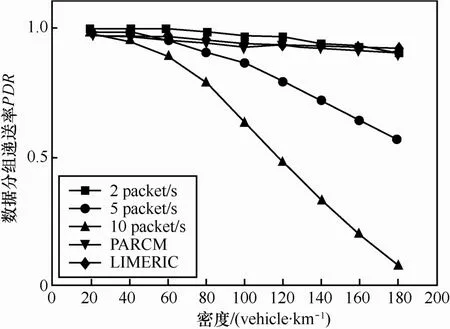
图5不同控制策略所对应的数据分组递送率
5) 物理层传输速率迭代
图6是物理层传输速率的迭代过程,该过程是用效用函数最大化来进行迭代计算所求得。从图中可以看出,通信范围内的所有节点经过大约 30次迭代过程就可以收敛到效用最大化时的发送速率,文中所建立的效用函数是一个关于相对速度、相对距离和发送速率的一个严格凹的连续函数,当两点之间的相对距离固定时,相对速度越大,其效用也就越大;而当行驶速度固定时,距离越近,其效用也就越大。故可得其最优发送速率是32 kbit/s左右,在实验中设定的Beacon消息的数据分组长度是500 byte,相对速度40 km/h,相对距离200 m。因此可得消息产生率大约是8 packet/s。该发送速率可以满足位置追踪精度的要求,而且 30次迭代计算过程,可以满足大部分安全应用需求。
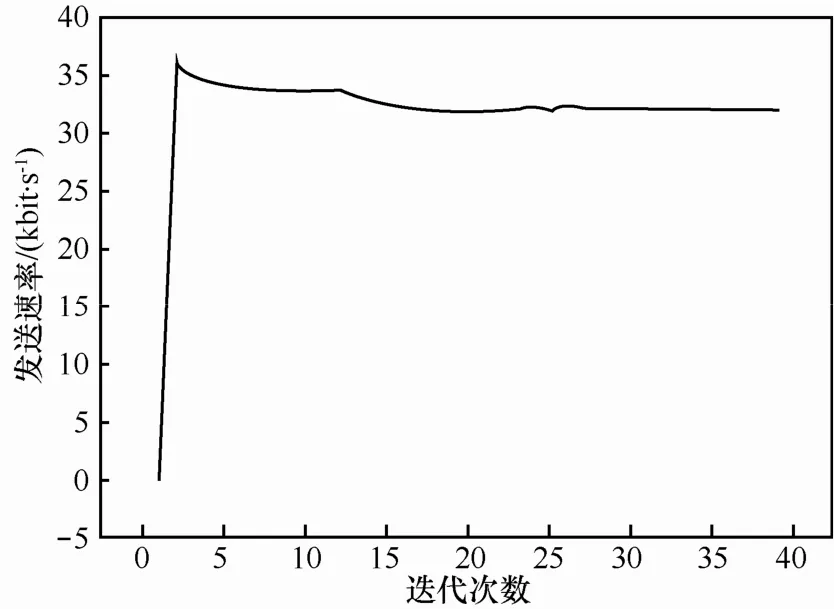
图6物理层传输速率的迭代过程
如图7所示,目标函数值在迭代30次之后趋于稳定,与图6中物理层发送速率由36 kbit/s变化至 32 kbit/s相对应,目标函数值相应从 911降至901,符合其收敛特性。

图7迭代过程的目标函数值
7 结束语
本文针对车联网环境中交通流密度的变化对信道拥塞的影响,以及传统拥塞控制方法存在的滞后性和不精确性问题,提出了基于信道拥塞代价计算的车联网自适应消息发送速率控制方法,通过求解效用函数,能得出满足应用需求的最优发送速率,然而在车流量密度较大时,减小消息产生率虽然能保证通信满足要求,但是会对安全应用的精度产生影响。所以未来的工作会在应用层设计消息编码策略和消息压缩策略,确保在减少消息产生率情况下,仍能保证安全应用精度需求。
[1]TORRENT M M, JIANG D, HARTENSTEIN H. Broadcast reception rates and effects of priority access in 802.11-based vehicular ad-hoc networks[C]// International Workshop on Vehicular Ad Hoc Networks,Philadelphia, USA,2004: 339-340.
[2]HARTENSTEIN H, LABERTEAUX K P. VANET: vehicular applications and Inter-networking technologies[M]// VANET-Vehicular Applications and Inter-Networking Technologies. Wiley John + Sons,2009.
[3]XU Q, MAK T, KO J, et al. Vehicle-to-vehicle safety messaging in DSRC[C]//International Workshop on Vehicular Ad Hoc Networks.Philadelphia, USA, 2004: 19-28.
[4]TSERTOU A, LAURENSON D I. Insights into the hidden node problem.[C]//International Conference on Wireless Communications and Mobile Computing. Vancouver, British Columbia, Canada, 2006,767-772.
[5]REZAEI S, SENGUPTA R, KRISHNAN H. Reducing the communication required by DSRC-based vehicle safety systems[C]//Intelligent Transportation Systems Conference, ITSC 2007. IEEE, 2007:361-366.
[6]KHORAKHUN C, BUSCHE H, ROHLING H. Congestion control for VANETs based on power or rate adaptation[C]//Proceedings of the 5th International Workshop on Intelligent Transportation (WIT). 2008.
[7]HUANG C L, FALLAH Y P, SENGUPTA R, et al. Intervehicle transmission rate control for cooperative active safety system[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(3):645-658.
[8]BANSAL G, KENNEY J B, ROHRS C E. LIMERIC: a linear adaptive message rate algorithm for DSRC congestion control[J]. IEEE Transactions on Vehicular Technology, 2013, 62(9): 4182-4197.
[9]DRIGO M, ZHANG W, BALDESSARI R, et al. Distributed rate control algorithm for VANETs (DRCV)[C]//Proceedings of the Sixth ACM International Workshop on Vehicular Internetworking. ACM,2009: 119-120.
[10]WANG N, LEI G, WANG X, et al. A beacon rate control scheme based on fuzzy logic for vehicular ad-hoc networks[C]//Artificial Intelligence with Applications in Engineering and Technology (ICAIET),20144th International Conference. IEEE, 2014: 286-291.
[11]LUN T, YIFU L, QIANBIN C. Optimized beaconing rate control for vehicular ad-hoc networks[J]. The Journal of China Universities of Posts and Telecommunications, 2015, 22(6): 10-50.
[12]SHAKKOTTAI S, RAPPAPORT T S, KARLSSON P C. Cross-layer design for wireless networks[J]. Communications Magazine, IEEE,2003, 41(10): 74-80.
[13]TOUMPIS S, GOLDSMITH A J. Capacity regions for wireless ad hoc networks[J]. IEEE Transactions on Wireless Communications, 2003,2(4): 736-748.
[14]LOW S H, LAPSLEY D E. Optimization flow control—I: basic algorithm and convergence[J]. IEEE/ACM Transactions on Networking(TON), 1999, 7(6): 861-874.
[15]KELLY F P, MAULLOO A K, TAN D K H. Rate control for communication networks: shadow prices, proportional fairness and stability[J].Journal of the Operational Research Society, 1998: 237-252.
[16]FALLAH Y P, HUANG C L, SENGUPTA R, et al. Congestion control based on channel occupancy in vehicular broadcast networks[C]//Vehicular Technology Conference Fall (VTC 2010-Fall),2010 IEEE. IEEE, 2010: 1-5.
[17]JOSE J, LI C, WU X, et al. Distributed rate and power control in DSRC[C]//Information Theory (ISIT), 2015 IEEE International Symposium. IEEE, 2015: 2822-2826.
[18]BERTSEKAS D P, TSITSIKLIS J N. Parallel and distributed computation: numerical methods[M]. Englewood Cliffs, NJ: Prentice Hall,1989.
[19]BAZARAA M S, SHERALI H D, SHETTY C M. Nonlinear programming: theory and algorithms[M]. John Wiley amp; Sons, 2013.
[20]ATHURALIYA S, LOW S H, LI V H, et al. REM: active queue management[J]. Network, IEEE, 2001, 15(3): 48-53.
[21]BANSAL G, KENNEY J B, ROHRS C E. LIMERIC: a linear adaptive message rate algorithm for DSRC congestion control[J]. IEEE Transactions on Vehicular Technology, 2013, 62(9): 4182-4197.
Adaptive message sending rate control method based on channel congestion cost calculation in VANET
LIU Ming-jian1, TAN Guo-zhen1, LI Shuai-bing1,DING Nan1, SONG Cai-xia1,2
(1. Computer Science Institute, Dalian University of Technology, Dalian 116024, China;2. College of Science and Information, Qingdao Agricultural University, Qingdao 266109, China)
In VANET, sending beacon messages reliably played a vital role in cooperative awareness and collision avoidance, and changes of vehicle density in real traffic environment had a direct impact on channel load and will cause the channel congestion to a certain degree, thus causing inefficiency of cooperative security applications. Aiming at this issue,a adaptive method based on channel congestion detection to control message sending rate was designed. First of all, an interference model that can accurately reflect the current state of the channel was established. Secondly, according to the Shannon information theory and network utility maximization theory, the optimal transmission speed of the current node in the physical layer was calculated. Finally, according to the mismatch of transmission rate and transmission queue length, the next moment's cost function of the channel congestion degree by monitoring the message queue was established to avoid channel congestion and queue overflow. The simulation experiment shows that the scheme effectively reduces communication transmission delay and avoids channel congestion, ensuring that the data be sent reliably.
VANET, congestion control, utility, message sending rate control
s:The National High-Tech Projects(No.2012AA111902), The National Natural Science Foundation of China(No.61471084)
TP393
A
10.11959/j.issn.1000-436x.2016202
2016-04-22;
2016-08-28
国家高科技基金资助项目(No.2012AA111902);国家自然科学基金资助项目(No.61471084)
刘明剑(1984-),男,辽宁大连人,大连理工大学博士生,主要研究方向为车联网环境下车辆安全预警技术与车联网消息调度器。

谭国真(1960-),男,辽宁大连人,博士,大连理工大学教授、博士生导师,主要研究方向为智能交通和车联网等。

李帅兵(1991-),男,河南郑州人,大连理工大学硕士生,主要研究方向为车联网通信自适应功率控制。
丁男(1978-),男,辽宁沈阳人,博士,大连理工大学副教授,主要研究方向为传感网络。

宋彩霞(1977-),女,山东即墨人,大连理工大学博士生,主要研究方向为车联网安全通信协议、信道资源分配、拥塞控制。
