三维激光扫描技术在深坑岩壁精细勘测中的应用
2016-11-10祝文婷
祝文婷
(南京市牛首山文化旅游发展有限公司,南京 210000)
三维激光扫描技术在深坑岩壁精细勘测中的应用
祝文婷
(南京市牛首山文化旅游发展有限公司,南京210000)
本文对三维激光扫描技术的基本原理、扫描仪分类、仪器选择以及三维激光扫描业务的工作流程进行全面的论述。根据项目实际情况,确定了扫描精度、站点以及标靶,并运用CYCLONE软件和GEOMAGIC软件对点云数据进行拼接、去噪等后处理,得到了满足工程精度要求的深坑岩壁三维模型,为结构基础设计和护坡处理提供了精确建筑信息模型。文中的相关仪器选择、参数取值以及后处理方法可供深坑岩壁的精细勘测提供工程参考。
深坑岩壁; 三维激光扫描技术; 点云数据; 数据后处理; 空间建模
【DOI】 10.16670/j.cnki.cn11-5823/tu.2016.04.13
1 引言
建造于复杂或特殊地貌之上的建筑结构,其基础及围护结构设计对于地貌信息和数据的准确度提出了很高的要求。传统离散单点采集三维坐标的方法,测点数量有限,测量效率低; 光学摄影的方法存在光学器件固有变形误差和图像数据转换误差,因而均不能满足复杂及特殊地貌的工程使用勘测精度和测量周期要求。
三维激光扫描技术运用激光测量原理,能够在短时间获得地貌信息大量且准确的三维数据。配套的数据处理软件可方便地对三维数据进行后处理、调用分析和三维建模。方便建筑、结构、暖通等各专业的数据调用和三维协同设计。相比传统测量方式的上述优势使得其在建筑领域得以快速发展和应用[1]。
本文首先对三维激光扫描技术的基本原理、常用扫描仪的分类及应用、实际工程扫描仪的选择以及扫描过程的工作流程进行全面介绍; 然后结合南京牛首山佛顶宫项目中的深坑岩壁精细勘测,对三维激光扫描技术从前期方案设计到扫描操作,再到数据处理和三维建模的过程进行了全面阐述。为三维扫描技术在相似深坑岩壁精细勘测中的应用提供借鉴。
2 三维扫描技术概述
三维激光扫描技术(Three-dimensional Laser Scanning Technology,简称TLS技术)利用激光测距原理、采用三维激光扫描系统,能够自动、连续、快速地获取待测对象表面密集的批量数据,解决了传统人工单点数据获取方式所存在的勘测精度低、勘测速度慢的缺点,是勘测领域的一次革命性的技术突破。
三维激光扫描系统主要由三维激光扫描仪、系统软件和附属设备三部分构成,如图1所示。系统软件主要包括测控软件和信息后处理软件。附属设备主要包括:数码相机、计算机、电源、线缆、三脚架、定标球、标尺等。
2.1基本原理
三维激光扫描技术的基本原理:以三维激光扫描仪的激光发射处为坐标原点,仪器竖向扫描面竖直向上的坐标轴为z轴,按右手坐标系法则在仪器横向扫描面垂直于z坐标轴建立x、y坐标轴,形成仪器坐标系统,如图2所示。
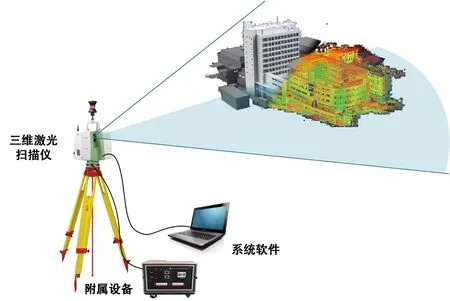
图1 三维激光扫描系统构成

图2 三维激光扫描仪仪器坐标系
以某一测点P为例:由激光束在竖向和横向扫描面的射出角度可测得P点在仪器坐标系统中的角度坐标α、θ(仰角为正、俯角为负); 根据扫描仪不同的激光测距原理,可测得P点距仪器坐标原点的距离s; 根据反射光的强度i,可以测得被测点的纹理信息; 即得到被测点相对于仪器坐标原点的极坐标及纹理信息(α,θ,s,i),根据式(2-1)将所得极坐标系转换为直角坐标系坐标,得任意一扫描点P在仪器坐标系统中的三维坐标(x,y,z,i)。若已知测站的空间坐标,即可换算出任意扫描点的绝对坐标值[2]。
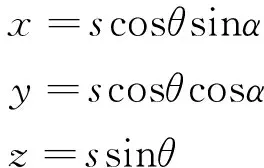
(2-1)
扫描仪在完成了一个θ剖面的测量后,扫描仪的上部就会围绕z轴以较小的角度Δα进行顺时针或逆时针的旋转来进行下一个θ剖面测量的初始化。这样重复进行剖面扫描测量,连接多个剖面,构成一幅扫描块,扫描过程如图3所示。
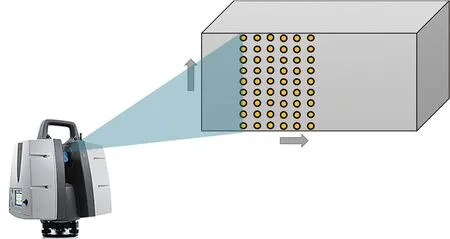
图3 扫描过程示意图
一个完整实体的测量往往需要从不同的位置进行多次扫描才可获取完整的实体表面信息。为实现不同位置的多个扫描块之间的精确合并,通常要求不同的扫描块(点云)在交接处至少有15%以上的重合区域,且重合区域要有比较明显的特点,为后续的点云数据拼接创造条件[3]。
2.2扫描仪的分类和选择
三维扫描系统的核心设备为三维激光扫描仪,扫描仪产品类型繁多,需根据测绘条件和对象选择扫描仪产品。常用三维激光扫描仪的应用范围及分类如表1所示。
根据扫描系统的运行平台,三维激光扫描仪分为:机载(或星载)型激光扫描仪、车载型激光扫描仪、地面型激光扫描仪和手持型激光扫描仪。
根据激光的测距原理,三维激光扫描仪分为:脉冲式激光扫描仪、相位式激光扫描仪和激光三角式激光扫描仪。其激光测距原理分别为基于时间测量原理(Time-of-flight,简称TOF)、基于相位测量原理(Phase measurement)以及基于三角测量原理(Optical triangulation)。
根据有效的扫描范围,三维激光扫描仪分为:短距离、中距离和长距离激光扫描仪。
表1 常用三维激光扫描仪的类型及应用范围
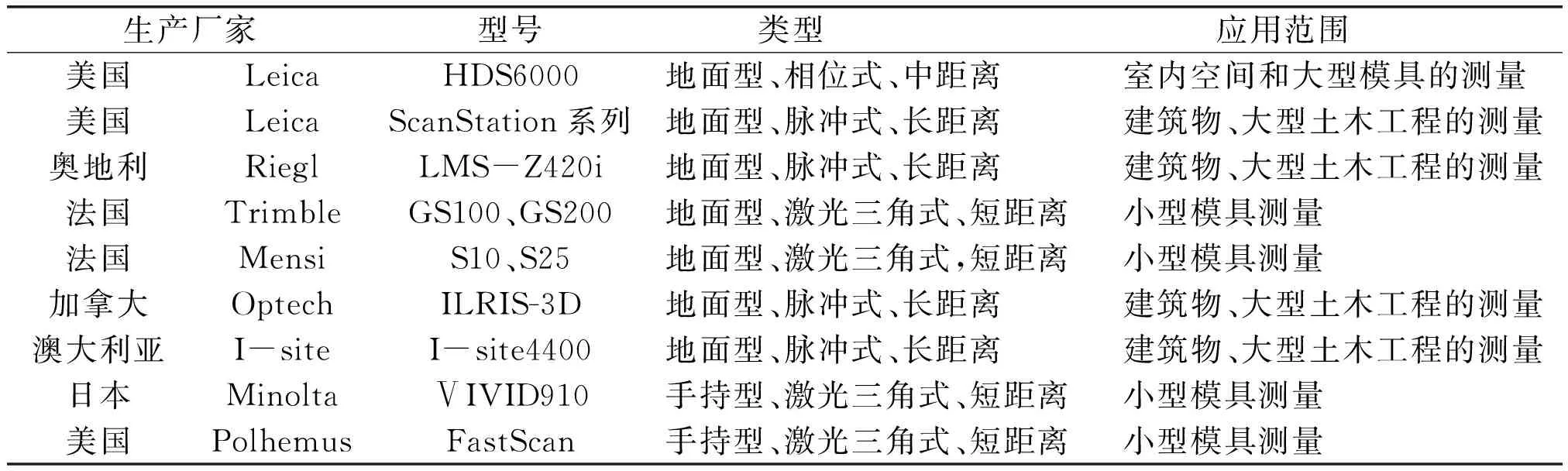
生产厂家型号类型 应用范围 美国LeicaHDS6000地面型、相位式、中距离室内空间和大型模具的测量美国LeicaScanStation系列地面型、脉冲式、长距离建筑物、大型土木工程的测量奥地利RieglLMS-Z420i地面型、脉冲式、长距离建筑物、大型土木工程的测量法国TrimbleGS100、GS200地面型、激光三角式、短距离小型模具测量法国MensiS10、S25地面型、激光三角式,短距离小型模具测量加拿大OptechILRIS-3D地面型、脉冲式、长距离建筑物、大型土木工程的测量澳大利亚I-siteI-site4400地面型、脉冲式、长距离建筑物、大型土木工程的测量日本MinoltaⅤIVID910手持型、激光三角式、短距离小型模具测量美国PolhemusFastScan手持型、激光三角式、短距离小型模具测量
对于本文所述的深坑岩壁精细勘测,由于扫描范围大于400m,机载、星载或车载型激光扫描仪附属设备价格高昂,故选用型号为Leica ScanStation C10的地面型、脉冲式、长距离三维激光扫描仪。
2.3Leica ScanStation C10三维激光扫描仪
本文选用的Leica ScanStation C10扫描仪的实物图及构造图如图4所示。主要构造包括:距离测量系统、横向和竖向角度测量系统、X棱镜、激光垂准仪以及双轴补偿器。

(a)实物图
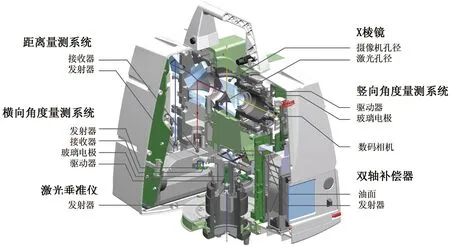
(b)构造图图4 Leica ScanStation C10实物及构造图
横向和竖向角度测量系统内的精密时钟控制编码器同步测量每个激光脉冲横向扫描角度值α和纵向扫描角度值θ。测距系统的基本原理为TOF基于时间的测量原理,测距的基本过程为[4]:
1)激光发射:发射器中的激光脉冲发射体在触发脉冲的作用下,发出一个极窄高速激光脉冲信号,并通过X棱镜改变方向射向物体,同时,激光信号被取样而得到主脉冲;
2)激光探测:通过同一个扫描镜和望远镜收集经物体反射回来的激光回波,通过接收器接受反射回来的激光脉冲信号;
3)时延估计:对接受器接受到的不规则回波信号进行相应相关处理,生成精确的回波脉冲信号;
4)时间延迟测量:由精密原子钟控制的精密计数器通过距离计数方法测量出激光回波脉冲与激光发射主脉冲之间的时间间隔,进而计算得物体与发射器间的距离。
2.4TLS测量系统工作流程
TLS测量系统的工作主要有三个阶段:方案设计阶段、数据采集阶段和后处理阶段。
方案设计阶段主要针对待测物尺寸、细部特征及场地条件,进行采样密度、站点数量、设站位置以及扫描路线进行现场勘察及方案设计。
数据采集阶段采用三维激光扫描系统在设计站点,采用合适的扫描分辨率,在保证扫描区无人车干扰的情况下进行扫描作业,获取待测物表面空间位置的点云数据,并初步检测数据是否满足要求并进行初步质量分析和控制[5]。
后处理阶段运用点云处理软件将各站点采集得的点云数据进行拼接和归并、去噪处理、坐标纠正等工作,再利用三维建模软件对处理后的点云数据进行曲面拟合,建立三维模型。
整个TLS测量系统的工作流程,如图5所示。
3 工程应用
TLS技术在土木建筑领域的应用正处于快速发展时期,应用涉及古建筑重建、文物保护、地形勘测、城市规划等诸多方面。本文将基于上述TLS技术原理、设备和工作流程将其应用于南京牛首山项目工程深坑岩壁结构的精细勘测之中,为工程设计提供深坑岩壁的建筑信息模型。

图5 TLS测量系统工作流程
3.1项目介绍
南京牛首山位于南京市江宁区,因山体东、西两主峰形如牛头双角得名。西峰山体由于1937和1958年两次破坏性的铁矿开采,形成如图6所示深矿坑:矿坑垂直高差近70m,长边跨度近400m。

图6 牛首山西峰矿坑
牛首山佛顶宫铝合金网壳项目建立于深矿坑之上,如图7所示。项目由大、小两个铝合金单层网壳结构组成,建筑总高89.3m,总建筑面积近10×104m2,主体建筑共9层,地下6层,是国内首个建在废弃矿坑内的大型公共建筑项目。
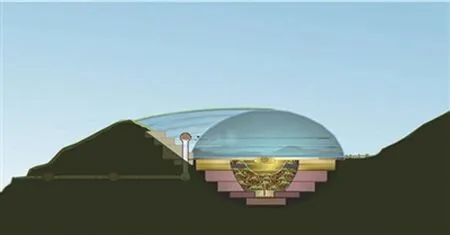
图7 建于深矿坑之上的牛首山佛顶宫
3.1主要技术难点
该项目的主要技术难点在于:
(1)深矿坑边缘存在滑坡危险,需在山体两侧护坡打下500多根防滑桩,使用长达150km的锚索固定山体,需要等高线等地貌数据。
(2)建筑主体完全由深矿坑底部支承,基础设计需要对详细精准的地貌数据,但由于爆破开挖过程无法准确设计,开挖后若根据基础设计对深坑地貌进行局部调整的成本过高,需要实时准确的地貌数据。
(3)机电设备、给排水管线、暖通通风设备和管道系统的设计可能因实际地貌而进行调整,调整会引起管线冲突与干涉,精准的深坑岩壁地貌三维勘测资料对于专业间的沟通协调也十分重要。
传统的勘测方法受限于测量精度、测量周期,且无法高效的转换为建筑信息模型,无法解决本项目的技术难点。因此采用三维激光扫描技术对深坑岩壁进行精细勘测,为项目设计提供精确建筑信息模型。
3.2扫描方案设计
3.2.1采样精度设计
选择合适的采样间隔对于数据存储量、勘测精度、扫描速度和后期处理难度有直接关系。采样间隔过大,数据量小、勘测精度低、扫描速度快,可能导致后期处理数据不足,待测对象信息反映不全面。采样间隔过小,数据量大、扫描速度慢,虽然勘测精度高,但整个过程对于存储设备、勘测周期以及后期处理设备要求较高。因此需根据项目实际情况,合理的选择采样精度[6]。根据本项目工程设计的精度要求,扫描采用了较高的采样密度,采样精度为2mm。
3.2.2站点位置选取
测量选择多个站点,从不同的位置进行多次扫描,并在实地部分位置放置通视标靶(公共标志球),以实现多次扫描的精确合并,便于后处理阶段点云数据拼接。项目选择17个站点和23个标靶(公共标志球),站点及标靶(公共标志球)布置如图8所示。

(a)站点布置

(b)标靶布置图8 项目站点及标靶布置
3.3点云数据处理与三维建模
3.3.1点云数据分站导出
采用cyclone软件将不同角度所得深坑岩壁点云数据导出并显示,以其中三个站点数据为例,站点11、站点12和站点13导出的点云数据如图9a-(c)所示。
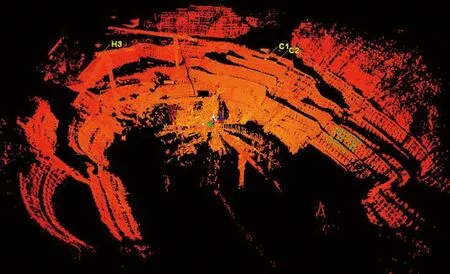
(a)站点11

(a)站点12

(c)站点13图9 部分站点点云数据图
3.3.2点云数据拼接和去噪处理
利用cyclone软件对分站点云数据进行拼接总装。软件自动选取两站中3个以上同名控制点实行拼接,拼接完成的数据再次利用数据融合功能将重合部分的数据进行归并,以避免数据的冗余和不一致。经过多站拼接后,各站点云数据处于统一的坐标系中,即2.1节所述仪器坐标系统,通过添加基站式GPS接收机进行量测所得的全局控制点,建立其与地理坐标系的位置关系。
由于扫描过程中外界环境因素对扫描目标的阻挡和遮掩,如扫描过程中移动的车辆、行人树木的遮挡,及建筑物本身的反射特性不均匀,导致最终获取的扫描点云数据内可能包含不稳定的点和错误的点,这些影响将导致点云数据含有偏差。因此点云数据拼接后的预处理工作,主要是清除一些不正确的数据,获取有效数据,即去噪处理。
拼接和去噪处理后的点云数据,如图10所示。
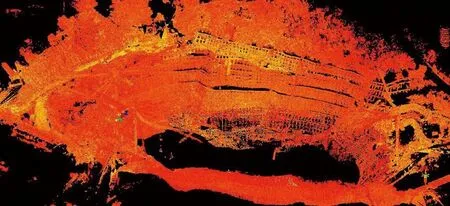
图10 拼接和去噪处理后的点云数据图
3.3.3三维建模
基于点云数据的三维建模方法主要有三种,分别为软件自动匹配建模、基于GEOMAGIC建模和人工手动建模,其适用对象如表2所示。
表2 基于点云数据的三维建模方法
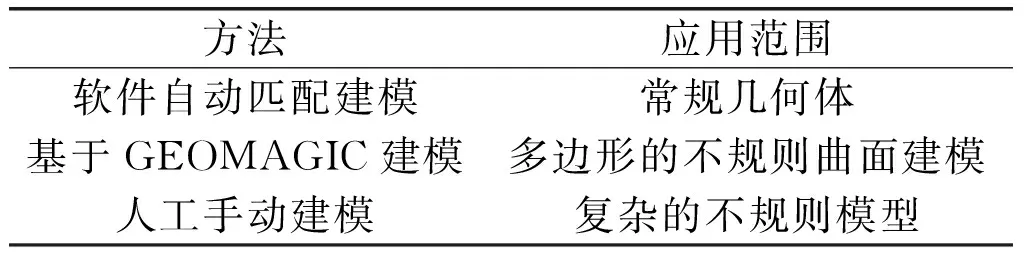
方法应用范围软件自动匹配建模常规几何体基于GEOMAGIC建模多边形的不规则曲面建模人工手动建模复杂的不规则模型
软件自动匹配建模适用于能够分解为软件提供的常用几何形体(如:孔、圆柱、圆锥等)的目标实体组件,对于本项目中大量无法分解为常用几何形体的目标实体的建模该方法具有很大的局限性。
人工手动建模的方法虽使用与本项目的三维数据建模但需要大量的人工劳动和建模人员的经验。
因此,本项目采用第二种方法,对深坑岩壁进行三维建模,为减小模型数据文件、提高建模效率,在保证工程精度的前提下对不关心区域进行网格简化处理,基于GEOMAGIC的牛首山矿坑三维整体模型如图11所示。

图11 牛首山矿坑三维整体模型
4 结论
本文从三维激光扫描技术的基本原理、三维激光扫描仪的分类和选择以及三维激光扫描系统的工作流程入手,结合南京牛首山佛顶宫项目中的深坑岩壁精细勘测,对三维激光扫描技术从前期方案设计到扫描操作,再到数据处理和三维建模的过程进行了全面阐述。主要结论如下:
(1)对于牛首山西峰这种测量范围大于400米的工程,采用地面型、脉冲式、长距离三维激光扫描仪比较适用,可以保证足够的工作效率和扫描精度。
(2)对于类似牛首山佛顶宫深坑岩壁项目,采用三维激光扫描技术,测得工程点云数据,并对其进行数据拼接、去噪等技术处理,结合通用三维数字建模软件,可以建立比较准确的三维数字模型,为结构基础设计及湖泊处理提供准确的地貌三维建筑信息模型。
(3)在工程管理中根据项目特点,合理采用三维激光扫描技术,结合信息化、数字化手段,可以保证施工现场勘察数据的准确性,为设计提供可靠的依据,同时提高施工效率,保证项目顺利推进。
[1]Rudolf STAIGER.Terrestrial Laser Scanning Technology,Systems and Applications[C].2nd FIG Regional Conference.Marrakech,Morocco,December 2-5, 2003.
[2]马俊伟, 唐辉明,胡新丽,等.三维激光扫描技术在滑坡物理模型试验中的应用[J].岩土力学, 2014, 35(5): 1495-1505.
[3]宋宏. 地面三维激光扫描测量技术及其应用分析[J].测绘技术装备, 2008(2): 40-43.
[4]张会霞. 三维激光扫描点云数据组织与可视化研究[D].中国矿业大学(北京), 2010.
[5]刘春, 杨伟.三维激光扫描对构筑物的采集和空间建模[J].工程勘察, 2006(4): 49-53.
[6]马立广. 地面三维激光扫描测量技术研究[D].武汉:武汉大学, 2005.
Application of 3D Laser Scanning Technology to Accurate Geological Survey of Palisades
Zhu Wenting
(NanjingNiushouMountainCulturalTourismDevelopmentCo.,Ltd.,Nanjing210000,China)
This article introduces fundamentals of Three-dimensional Laser Scanning(TLS)technology,categorizing and selecting of three-dimensional laser scanner and workflow of TLS system.According to actual project condition,accuracy,sites and targets of scanning are determined.Merge and de-noising of point-clouds data are completed using software CYCLONe and GEOMAGIC.3D model of the palisades meeting requirements of engineering accuracy is established to provide exact geological data for design of foundation and slope protection.Device selection,parameter selection and method of post-processing in this article can provide
for other similar accurate geological survey of palisades.
3D Laser Scanning Technology; Point Clouds Data; Data Post-processing; Spatial Modeling
祝文婷(1976-),女,工程师。主要从事项目设计与施工管理工作。
TU198+.6;P633;TU3
A
1674-7461(2016)04-0073-06
