基于欧姆龙NJ控制器的门架式机器人控制系统
2016-11-03姬海翔王绍宗靳云发
姬海翔,张 倩,王绍宗,靳云发,庄 圆
(机械科学研究总院先进制造技术研究中心 先进成形技术与装备国家重点实验室,北京 100083)
基于欧姆龙NJ控制器的门架式机器人控制系统
姬海翔,张 倩,王绍宗,靳云发,庄 圆
(机械科学研究总院先进制造技术研究中心 先进成形技术与装备国家重点实验室,北京 100083)
为提高钢构行业的自动化程度和生产效率,设计出门架式钢板自动分拣机器人,实现了切割后钢板的自动分拣。门架式机器人的控制系统选用欧姆龙NJ控制器,采用EtherCAT总线方式连接伺服控制器和I/O模块,实现伺服电机的实时控制、多电机直线插补;通过Ethernet连接触摸屏,实现人机信息交互;增加MODBUS通讯模块与企业MES系统通讯,实现生产任务信息的实时通讯。
NJ控制器;伺服电机;直线插补
0 引言
在传统钢构加工车间内,切割后的钢板分拣以手工操作为主,工作环境恶劣,对工人的身体健康造成极大的危害。因此,利用自动化、数字化等现代技术改造传统钢构加工已成为行业发展的必然趋势。本文结合钢板自动分拣的具体需求,开发出钢板自动分拣机器人,并开发出基于欧姆龙NJ控制器的门架式机器人自动控制系统。该控制系统实现了对钢板的自动分拣,提高了钢构加工的生产技术水平和生产效率。
1 门架式机器人结构
门架式机器人主要由门架结构、运动系统和钢板抓取机构组成。机器人总体尺寸为16900mm×10200mm ×8300mm,行程长、跨距大是其主要特点。门架结构为整个机器人的主体结构,采用型材焊接而成,运动系统及电磁吸盘等均安装在门架结构上。
运动系统主要由X轴、Y轴、Z轴和A轴组成。X轴、Y轴各设计有两台伺服电机;Z轴和A轴各设计有一台伺服电机。各运动轴均由伺服电机提供驱动力,根据实际情况采用不同的运动机构形式,X轴采用轮式行走方式,Y轴和Z轴采用直线导轨形式,利用伺服电机驱动齿轮在齿务上运动,结构及外形尺寸紧凑合理;A轴采用回转支撑结构。钢板抓取机构为双电磁吸盘形式,以保证对不同重量、不同尺寸的物料进行自动分拣。门架式机器人的整体结构和主要控制元件如图1所示。
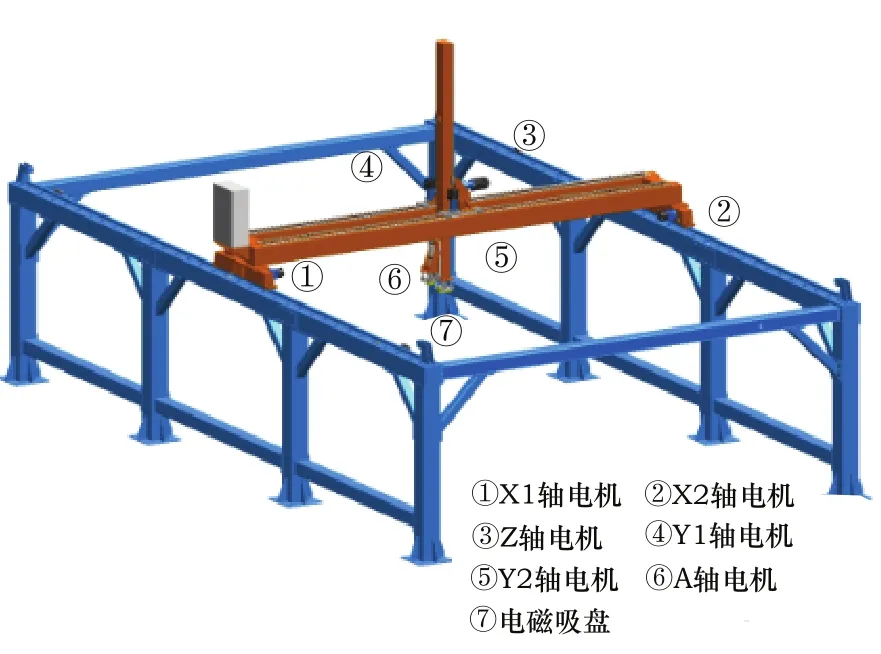
图1 门架式机器人整体结构和主要控制元件
2 门架式分拣机器人控制系统设计
2.1控制系统要求
根据现场生产要求及工艺需要,所开发的门架式分拣机器人控制系统需要满足以下技术要求:
1)接受MES系统发送的任务并完成任务执行;
2)实时将机器人工作状态向MES系统进行反馈;
3)高速运行情况下,分别实现X轴与Y轴的同步运动;
4)满足变负载状态下,电机稳定运行及运动机构精准定位;
5)具有多重安全防护措施,保证生产安全。
2.2硬件组成
NJ控制器是欧姆龙最新推出的新一代PLC,NJ系列PLC产品集成了EtherCAT技术的开放式网络控制器,以及EtherNET/IP网络的开放式网络信息和通讯技术并建立了统一的自动化软件平台Sysmac Studio,该软件完美结合运动控制与逻辑控制,可实现最多64轴的运动控制,可实现直线、圆弧等的插补动作功能,通过简单的设定,即可完成对控制器、网络、伺服以及其他现场设备的配置,通过内部功能块即可完成复杂的运动控制[1,2]。
根据门架式机器人的控制系统要求,在控制系统硬件选型中,控制器选用欧姆龙NJ控制器,采用EtherCAT总线方式连接伺服控制器和I/O模块,实现对伺服电机的实时控制、多电机直线插补;通过Ethernet连接触摸屏,实现人机信息交互;增加MODBUS通讯模块与企业MES系统通讯,实现生产任务信息的实时通讯。图2为控制系统硬件组成。
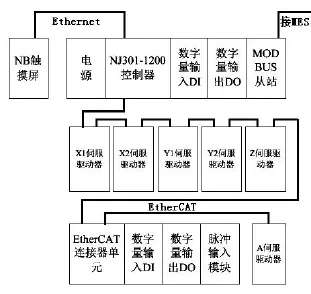
图2 控制系统硬件组成
3 软件设计及开发
3.1网络配置及设备组态
控制系统采用编程软件Sysmac Studio进行系统配置和软件设计。首先进行EtherCAT网络配置和设置,将控制系统中的总线设备按照物理连接顺序依次配置到网络中。其中,对于使用非欧姆龙厂商的第三方设备,配备时需将设备的*.xml文件导入到编程软件,并添加控制需要的PDO映射,如图3所示。
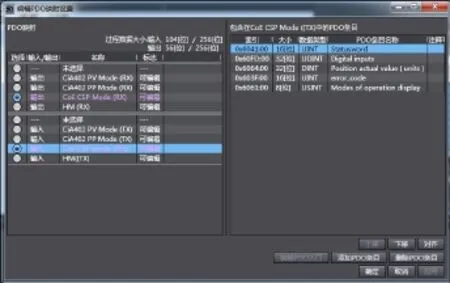
图3 PDO映射
编辑CPU/扩展机架,将实际硬件的控制器和模块添加到机架中,并进行对应的参数设置。其中,添加需要控制的伺服轴、虚拟轴和编码器轴,选择对应的输出设备,并正确分配PDO映射到各轴的详细设置中,并根据实际情况添加需要控制的轴组,确保轴和轴组设置正确无误。
3.2多电机直线插补的方案分析
为保证运动控制系统的精确定位,需要确保运动轴在运动过程中的同步运动控制。在本控制系统中,采用多电机直线插补的方式实现电机同步控制。
在实现多电机直线插补时,应充分考虑方案实际操作的方便性,以及对同步性和定位精度的影响。有三种实现方案,示意图如图4所示,其方案内容及对应的优缺点如表1所示。
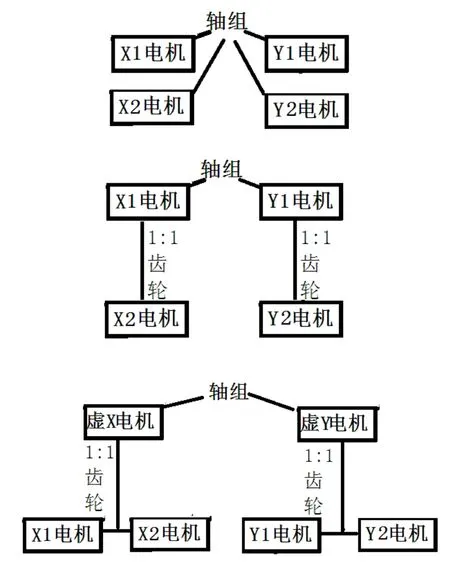
图4 方案示意图
综合分析三种方案的优缺点,并结合现场使用情况,在本控制方案中,选用方案三实现电机直线插补。
3.3控制系统程序实现
根据系统自动运行时的控制要求,考虑系统的稳定及生产的安全,在软件系统设计基础上,通过调用Sysmac Studio编程软件中的基于PLCopen开发的内部功能模块,如:可运行(MC_Power)、微动移动(MC_MoveJog)、原点复位(MC_Home)、绝对值定位(MC_MoveAbsolute)、齿轮动作开始(MC_ GearIn)、齿轮动作解除(MC_GearOut)、启用轴组(MC_GroupEnable)、直线插补(MC_MoveLinear)等命令完成运动控制,通过梯形图指令、ST语句指令等进行逻辑流程的编写。其中,Y轴绝对值定位控制程序图如图5所示。
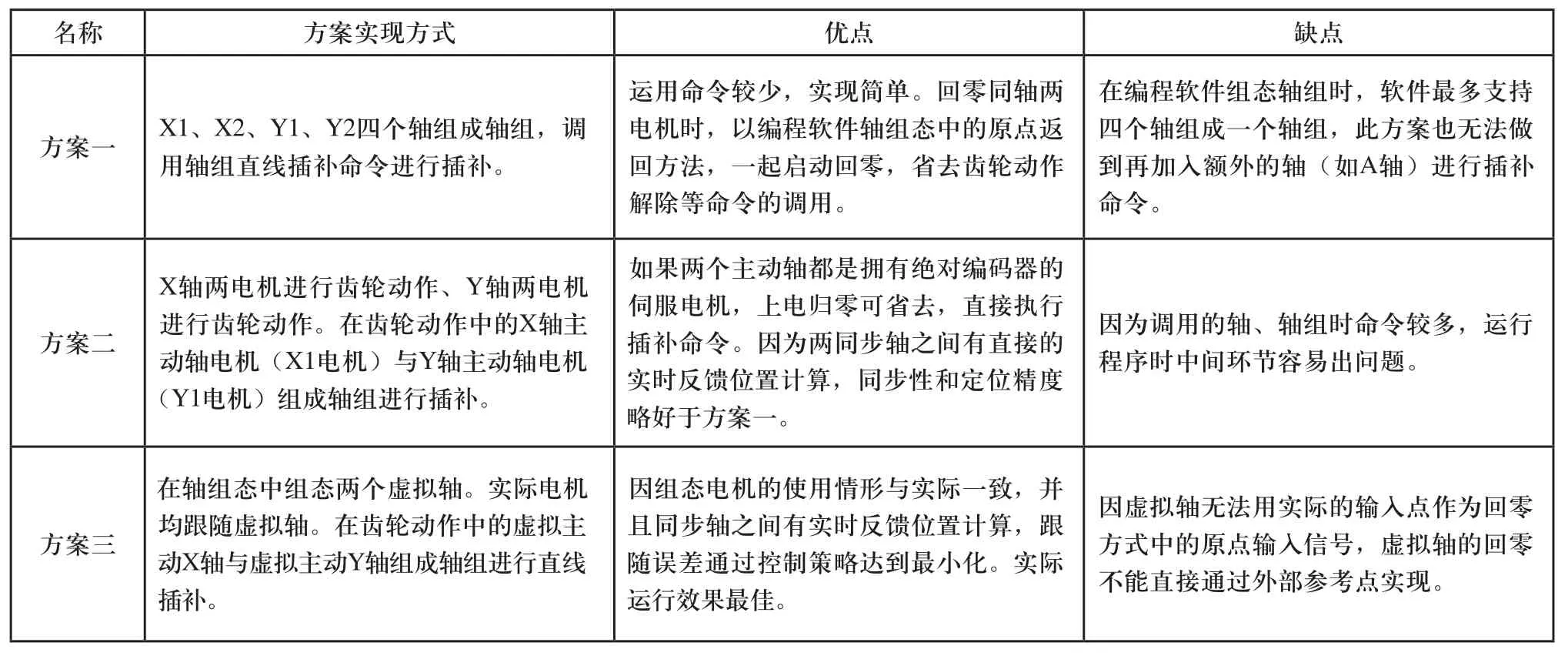
表1 多电机直线插补方案分析

图5 Y轴绝对值定位控制程序图
4 监控系统设计
人机界面用于设备与操作人员之间的沟通,操作人员可通过人机界面实现门架式机器人的参数设置,查看运行信息、实时位置和故障报警等。人机界面的开发通过NB-Designer实现,确保与控制器之间高效、稳定连接。其中的自动设置界面,如图6所示,可进行板料厚度、X、Y、Z、A轴运行速度、运行的板料数量等参数设置;另外,运行信息界面显示了门架式机器人的当前运行信息和近几次完成任务的位置信息;在报警信息界面,可进行运行中故障信息的实时报警,并给出报警解决方法。
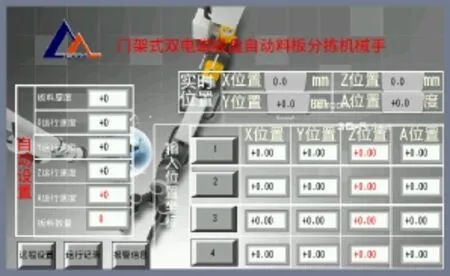
图6 门架式机器人人机界面
5 结束语
本文开发的门架式机器人应用于钢构车间切割后钢板的自动分拣。利用电机直线插补方案,可实现运动系统在大车行程13.1米,速度850mm/s、小车行程8米,速度650mm/s下,运动系统定位精度可达到±5mm,满足了用户使用要求。经过现场使用,本机器人有效降低操作人员和维护人员的劳动强度,提高了钢构加工的生产效率。

图7 门架式机器人现场
[1] 王月芹.基于欧姆龙NJ控制器机械手控制系统设计[J].机电产品开发与创新,2013(3):28-29.
[2] 王琦,陈志杰.欧姆龙NJ控制器在太阳能线切割机中的应用[J].太阳能,2012(21):32-34.
[3] 史金良,徐世许,吴琳婧.并联机械手控制系统设计[J].工业控制计算机,2014(10):46-47.
[4] 欧姆龙NJ系列指令基准手册[Z].2013.
Gantry robot control system based on the OMRON NJ controller
JI Hai-xiang, ZHANG Qian, WANG Shao-zong, JIN Yun-fa, ZHUANG Yuan
TP242.2
A
1009-0134(2016)10-0007-03
2016-06-20
姬海翔(1989 -),男,北京人,助理工程师,本科,研究方向为电气自动化。
