基于模糊控制的清水池水位控制系统设计
2016-10-31王小娟刘俊霞
王小娟,刘俊霞,胡 兵
(新疆工程学院,乌鲁木齐 830011)
基于模糊控制的清水池水位控制系统设计
王小娟,刘俊霞,胡兵
(新疆工程学院,乌鲁木齐830011)
清水池水位控制具有时变、滞后、突发性强等特点,难以准确建立合适的数学模型,为了达到快速维持清水池水位在期望值,避免所有水泵同时启停的目的,提出了一种清水池水位模糊控制的方法,该方法借助于MATLAB软件对控制系统进行了仿真,验证了模糊控制算法在清水池水位控制系统中应用的合理性,并计算出模糊输出控制量表,为确定水泵启停台数提供指导;采用了S7-200 PLC控制器和MCGS组态软件实现了清水池模糊控制系统的程序设计,给出相应的模糊控制PLC程序,并应用于清水池水位控制系统中;结果表明,系统稳定性好,响应速度快,能够较好地满足控制要求;系统将模糊控制理论与实际控制相结合,满足了清水池水位控制的要求,延长了水泵使用寿命,节省电能,为清水池水位自动控制提供借鉴。
清水池;模糊控制;PLC;MCGS;S7-200
0 引言
水厂工艺流程包括混合、沉淀、滤池、消毒和清水池等工艺过程,其中清水池具有储水、保障恒压供水和调节水量等重要作用,清水池水位受用户用水量和水井水泵启停台数的变化而变化,为了维持清水池水位在一定范围内变化,传统的方法采用所有水泵同时启停或者延时启停的方法,这种方法不能根据水位变化及变化趋势来调节水泵启停的台数,容易造成水泵的频繁启停,缩短水泵的使用寿命,对短时大量的应急用水反应能力较差。受到清水池面积大和用户用水随机性大的影响,对控制系统建立精确的数学模型很难实现,而模糊控制在模糊集理论的基础上发展而来,不需要数学建模,直接根据操作人员或者专家的经验编成模糊规则进行模糊推理,完成模糊控制[1],能够很好地解决这一问题。
1 系统结构及组成
在工业控制中,PLC由于其稳定性、可靠性和很高的性价比,应用广泛,文章提出以PLC为为控制器,采用模糊控制算法,借助于上位机的组态软件,实现清水池水位控制。控制系统结构如图1所示,系统上位机安装组态软件作为监控界面,实时监控现场液位、管道压力、流量、水泵轴承温度等模拟量的实际值、反映水井水泵的启停状态及系统运行状态,根据需要也可以通过组态软件完成手动/自动启停命令现场设备、设置报警值、修改设定值、保存运行数据等任务,系统下位机采用西门子S7-200PLC作为控制器,运用模糊控制算法决定运行多少台水泵和运行哪台水泵。从节省成本上考虑,上位机和下位机之间采用PPI通信,下位机与现场液位、管道压力等等模拟量输入之间采用Modbus通信[2]。

图1 控制系统结构图
2 模糊控制系统设计
模糊控制系统设计的关键是模糊控制器的设计,模糊控制器的设计包括输入量的模糊化处理,模糊控制规则的确定,模糊推理模糊决策的实现以及最终的去模糊化[1],系统原理图如图2所示,模糊控制器的输入量为水位的给定值和水位的测量值的偏差e以及偏差变化率ec,模糊控制器的输出量u为运行水泵的台数,通过继电器控制水泵的启停,维持清水池水位在一定范围内变化。
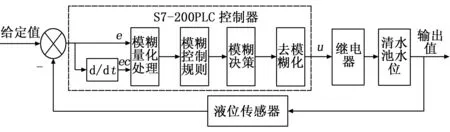
图2 控制系统原理图
2.1输入输出及其模糊化
清水池水位高度为0~6 m,要求系统水位维持在1~5 m,设定系统期望水位为3 m,根据水位偏差e=r-y,其中r为给定水位,y为实际水位输出,从而确定e的基本论域为[-2,2]。水位偏差的变化率为:
其中:ei为本次水位偏差,ei-1为上一次的水位偏差,确定水位偏差的变化率为[-0.02 m/min,0.02 m/min]。系统有4台水井水泵,输出为运行水泵的台数,确定输出u的基本论域为[0,3][3]。
控制系统输入输出变量e、ec、u经过离散化和模糊化处理后的变量为E、EC、U,选取偏差E的模糊变化等级为{-2,-1,0,1,2},模糊语言值为{NB(负大),NS(负小),O(零),PS(正小),PB(正大)},分别表示清水池水位很高,水位高,水位适中,水位低,水位很低;选择偏差变化率EC的模糊变化等级为{-2,-1,0,1,2},模糊语言值为{NB(负大),NS(负小),O(零),PS(正小),PB(正大)},分别表示清水池水位偏差增大很快,偏差增大快,偏差适中,偏差减小快,偏差减小很快;选取输出量U的模糊变化等级为{-2,-1,0,1,2},模糊语言值为{NB(负大),NS(负小),O(零),PS(正小),PB(正大)},则分别表示水井水泵运行0台,运行1台,运行2台,运行3台,运行4台[4]。根据经验,结合控制简单的原则,选取Z形隶属函数、三角形隶属函数、S形隶属函数三者结合的隶属函数作为E、EC、U的隶属函数,其中NB(负大)选用Z形隶属函数;NS(负小),O(零),PS(正小)选用三角形隶属函数;PB(正大)选用S形隶属函数。偏差E的隶属的函数图如图3所示,EC和U的隶属函数与E相同。
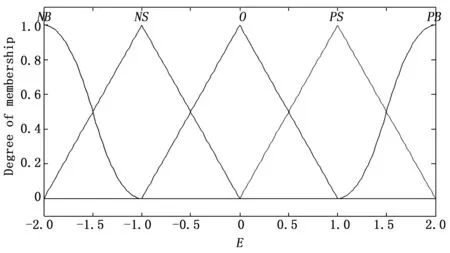
图3 偏差E的隶属度函数图
2.2模糊控制规则
模糊控制的控制规则通常根据人们的工作经验来制定,清水池水位模糊控制系统的输入为水位偏差e和水位偏差变化率ec,输出量为水井水泵启动的台数u,其中输入变量正负的意义为:
(1)若水位偏差e为负,表明清水池水位高于给定值;水位偏差e为正,表明清水池水位低于给定值。
(2)水位偏差变化率ec为负,表明清水池水位偏差增大;水位偏差变化率ec为正,表明清水池水位偏差减小。
根据操作人员的工作经验,当水位偏差E为负大,水位偏差变化率EC为负大时,表明水位很高且水位上升很快,需要停泵,所以输出量U选择负大;当水位偏差E为负大,水位偏差变化率EC为正大时,表明水位很高但水位下降很快,需要适当选择水泵运行,所以输出量U选择零;当水位偏差E为正大,水位偏差变化率EC为正大时,表明水位很低且水位下降很快,需要泵全部运行,所以输出量U选择正大[5]。根据以上经验可制定模糊控制规则表如表1所示。

表1 模糊控制规则表
2.3模糊推理及反模糊
系统模糊推理采用mamdani法,系统模糊控制规则表共有25条规则,每条规则用“IF - and -THEN”来描述,如IFEisNBandECisNBTHENUisNB,且每条规则对应的模糊关系[6]为:
Ri=Ei×ECi×Ui
由此得出水位偏差E、水位偏差变化率EC与输出量U之间总的模糊关系为:
当已知系统的水位偏差E的模糊量、水位偏差变化率EC的模糊量,系统输出量U的模糊量[6]为:
U=(E×EC)°R
对系统输出量U的模糊量进行反模糊,根据面积重心法得到控制量,控制量乘以量化因子就可以得到实际的输出控制量,如表2所示。
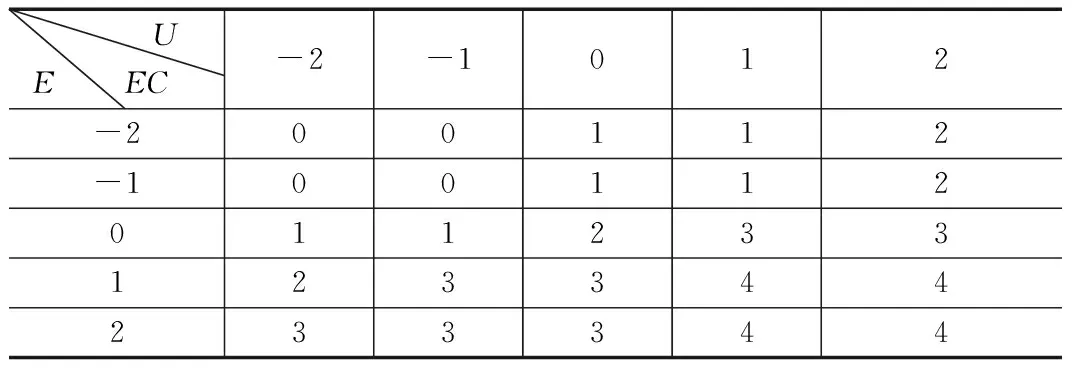
表2 输出控制量
2.4系统Matlab仿真
为了验证模糊控制算法的合理性和控制效果,选择适当参数[7],可利用Matlab/Simulink对清水池水位控制进行仿真,在Matlab软件的命令窗口中输入fuzzy,进入FIS Editor界面,在界面中设置输入水位偏差E、水位偏差变化率EC和输出量水井水泵启动台数U的模糊变化等级和隶属函数,如图所示。根据模糊控制规则表,在界面菜单Edit中点击rules设置模糊关系语句,在界面菜单View中点surface可以查看输入输出关系曲面图,如图4所示,系统具有响应速度快,可行性好的特点。
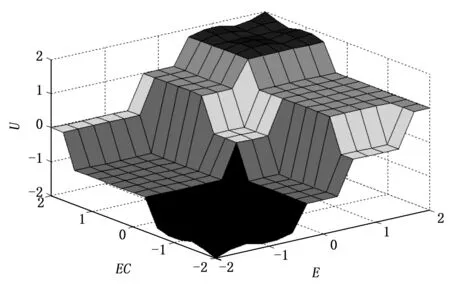
图4 输入输出关系曲面图
3 系统PLC程序设计
从节省成本和满足控制要求的角度出发,系统选用S7-200PLC为控制器,PLC控制器以主程序调用子程序的方式完成输入数据采集,输入模糊化处理,输出控制量表的查询,输出水泵选择等控制任务[8];系统现场变送器选用具有Modbus通信的投入式液位传感器、扩散硅式的压力传感器、转子式的流量传感器,将现场采集的液位、压力、流量、电压和电流信号经过Modbus总线输入到PLC的变量存储区,在输入模糊化处理子程序完成现场液位与给定液位的运算,得到偏差e和偏差变化率ec,经模糊化处理后变成偏差E和偏差变化率EC,在输出控制量表查询子程序中,系统根据偏差E和偏差变化率EC查询输出控制量表得到输出水泵的台数,在输出水泵选择子程序中,系统根据各台水泵运行时间的长短,采用轮循的方式运行水泵,以防止某些水泵长期不用而生锈损坏,部分模糊控制PLC程序[9-10]如表3所示。
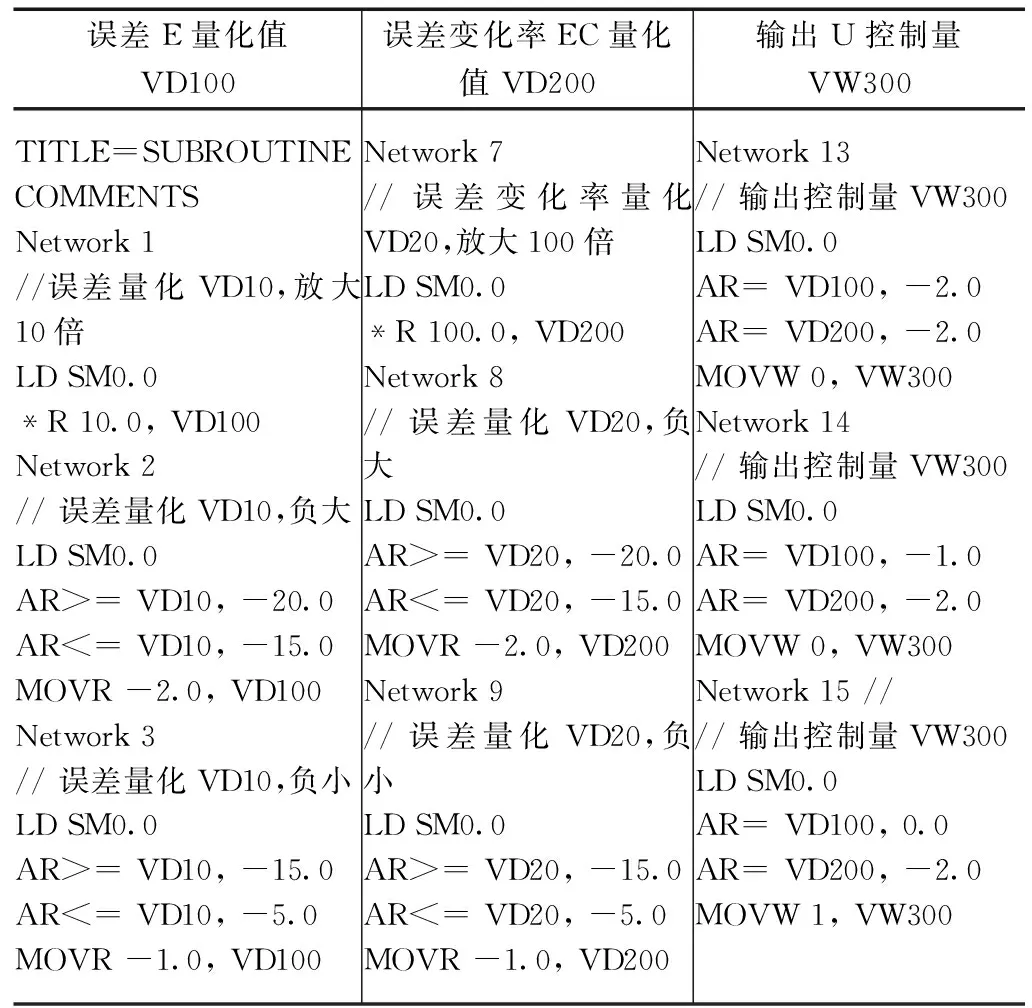
表3 模糊控制PLC程序(部分)
系统PLC与上位机采用S7-200PPI通信,上位机安装MCGS组态软件,通过完成组态软件实时监控现场液位、压力、流量信号的变化,监控水井水泵的运行状况及电流电压的变化,记录系统输入输出的实时及历史数据,设置报警,修改给定值等等任务,做到省时、省力和节省人力成本。
4 控制系统运行结果
系统在新疆某水厂清水池控制系统中进行了实验调试,根据现场调试现象,对仿真输出参数做了一定程度的修改,调试后,系统可以根据用户用水量的变化和水井水泵台数的变化而自动启停水泵的,维持清水池水位在一定范围内变化,如图5所示,当前清水池水位为2.63 m,1#水井水泵处于运行状态,其余三台泵处于停止状态,具有稳定性好,应对水位突变能力强的特点。
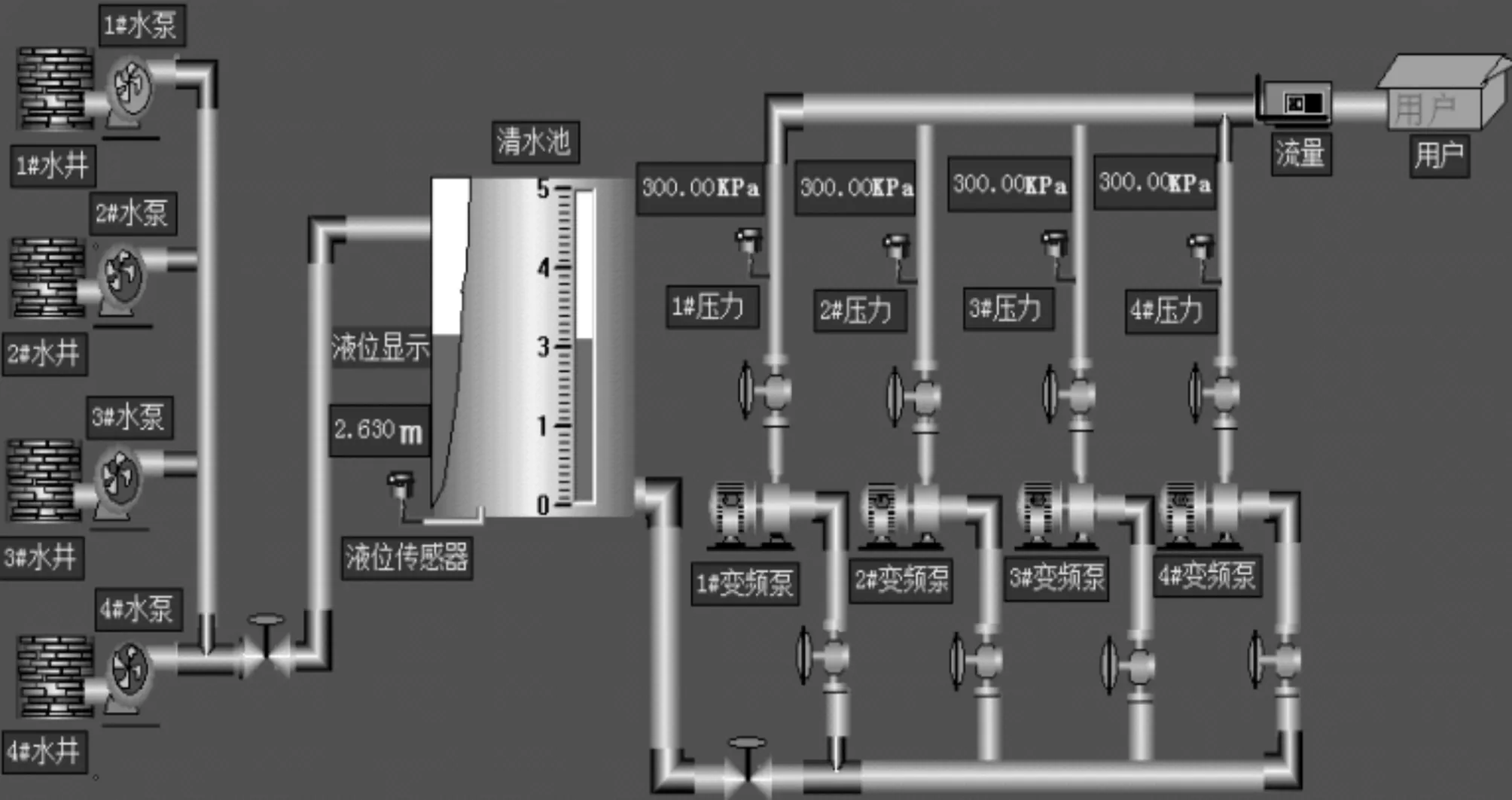
图5 组态界面图
5 结束语
系统将模糊控制应用于清水池控制系统,通过Matlab中的Fuzzy实现清水池控制系统的仿真,验证系统的可行性,结合PLC和MCGS实现清水池控制系统的设计,在应用过程中,系统出现了当偏差变化较小对系统产生干扰的现象,针对此类问题,对系统做了一定程度的改进并应用到新疆地区某水厂自动控制中,控制效果良好,为清水池控制系统的设计提供了借鉴。
[1] 刘金琨. 智能控制[M]. 北京:电子工业出版社,2014.
[2] 胡兵,熊新荣,袁勇,等.基于Modbus总线的马铃薯储藏库温湿度采集[J]. 湖北农业科学, 2014, 23(53): 4969-4972.
[3] 张宇, 李鸣, 汤志彪, 等. 基于 S7-300PLC 的电加热器模糊控制编程实现[J]. 南昌大学学报: 工科版, 2005, 27(3): 59-63.
[4] 张闯志, 张晓光, 程羽, 等. 模糊控制在井下泵房监控系统中的应用研究[J]. 矿山机械, 2008, 36(17): 71-74.
[5] 张世懂, 陈寇忠, 魏免. 煤炭装车系统中溜槽升降的模糊控制研究[J]. 煤矿机械, 2013, 34(008): 69-71.
[6] 智能控制实验与综合设计指导[M]. 北京:清华大学出版社, 2008.
[7] 谢守勇, 李锡文, 杨叔子, 等. 基于 PLC 的模糊控制灌溉系统的研制[J]. 农业工程学报, 2007, 23(6): 208-210.
[8] 董金善, 袁士豪, 顾伯勤, 等. 高压超临界萃取装置的模糊 PID 控制方法[J]. 控制工程, 2011, 18(2): 228-231.
[9] 宋伯生.PLC编程实用指南[M].北京:机械工业出版社,2006.
[10] 李楠, 张德强. 基于 S7-200 PLC 的模糊控制研究[J]. 辽宁工学院学报, 2007, 26(6): 403-405.
Designing of Level Control System in Clean Water Tank Based on Fuzzy Control
Wang Xiaojuan , Liu Junxia, Hu Bing
(Xinjiang Institute of Engineering, Urumqi830011, China)
According to the features of the time-variant,time-lag, strong burst and the mathematics model that is hard to build in clean water tank. In order to achieve the goal of rapid maintenance the water level at the expected value in the water tank ,and the start and stop of all the water pump at the same time are avoided. A kind of method has been put forward with fuzzy control.By means of MATLAB software,we simulate the control system and verify the rationality of fuzzy control algorithm using in clear water tank water level control,then calculate the output of fuzzy controller and to provide guidance for determining the pump units of the start and stop. S7-200 PLC controller and MCGS configuration software used,we realized the program design of fuzzy control system for the water tank,and given the corresponding fuzzy control PLC program which was applied to the water level control system of the water tank.The result shows that the system has better stability ,fast response which satisfies the control requirements.The fuzzy control theory is combined with the actual control to meet the requirements of the water level control of the water tank, which can extend the service life of the pump, save the electric energy, and provide reference for the automatic control of the water level in the tank.
clean water tank; fuzzy control; PLC; MCGS;S7-200
1671-4598(2016)04-0105-03DOI:10.16526/j.cnki.11-4762/tp.2016.04.031
TP273
A
2016-01-14;
2016-02-03。
王小娟(1984-),女,湖北孝感人,硕士,讲师,主要从事运筹学和控制论的研究。
