新型无舵机转向电动代步车设计与开发
2016-10-27阚英哲龙克俊谢小洪
阚英哲,罗 勇,龙克俊,谢小洪,程 新
(重庆理工大学 重庆汽车学院,重庆 400054)
新型无舵机转向电动代步车设计与开发
阚英哲,罗勇,龙克俊,谢小洪,程新
(重庆理工大学 重庆汽车学院,重庆400054)
针对市场上现有代步车、平衡车体积、质量较大,而且需要一定的时间来学习才能掌握驾驶技能的问题,设计了一款转向灵活平稳、车速安全适中、体积小巧、质量轻便的新型代步车。以轻便实用为原则,对整车的机械结构与目标参数进行了设计。针对不使用舵机而采用转速差来实现转向的特点,研究了转向角的计算方法。同时为了实现转向的平稳性,对控制系统的硬件和软件进行了规划与设计。采用PID控制方法实现对电机的稳定控制。对样车的测试结果表明:所设计的代步车结构合理、操作简单、行驶平稳,能满足广大使用者对代步车功能的需求。
新型代步车;转向设计;转角计算;PID
随着社会文明的发展,科学的进步,人类物质文化生活水平的提高和环保、能源意识的增强,人们的工作、学习、生活节奏日益加快,社会呼唤着一种无污染、低噪声、操作简单、速度适中的个人交通代步工具。如今活跃在市场上的有平衡车、电动车以及电动滑板车。乐行2013年发布其自主研发的第一代平衡车,正式上市10个月,实现销售额2亿元[1]。2015年,广东检验检疫局辖区内平衡车出口量已超过1 000万台,在国外的销量增幅超过200%[2]。可见,代步车具有广阔的发展前景。但是这些代步产品体积、质量较大,而且需要一定的时间来学习才能掌握驾驶其技能。针对以上存在的问题,本研究设计了一款体积小、质量轻,可以放在背包中的轻型代步车。该车不仅携带方便,而且操作简单,在短时间内便可熟练、安全、方便地使用。
1 机械结构设计与目标参数设定
1.1设计目标参数
代步车机械结构如图1所示。左右2个电极分别带动2个车轮旋转。该车配有2个电极驱动器,分别对左右电机进行转速控制,同时读取电机的转速脉冲返回单片机,方便计算车轮转速。为了减少小车的质量和体积,该车没有使用舵机等传动系统,而是将前轮固定在轴承上,利用左右车轮的转速差实现转向,简化了整车的结构。后轮采用万向轮,可以在小车进行转向的时候调成任何角度,使得小车转向更为流畅。压力传感器放置于小车的车身上方,对称分布在适合人脚踩踏的位置,通过控制脚上的压力来控制小车的直行和转向。
使用者可以站在2个压力传感器放置的位置,通过2只脚的压力变化控制小车直行或者转向。当左脚的压力比右脚的压力大时,小车会进行左转,反之右转。当2只脚的压力差在一定小的范围内,小车会直行。当使用者使用较大的压力踩压力传感器时,小车会以较高的车速行驶;以较小的压力踩时,小车会以较低的速度行驶。

图1 代步车机械结构
该车是一款城市便捷代步车,其最高车速要在安全适中的范围内。交通专家通常将自行车的正常车速定位于15km/h,基于代步车的行驶车况以及操作难易度,该车设计最高车速为10km/h。这样,既保证了使用者的一般速度要求,又保证了行车安全性。在爬坡坡度为5°的时候也应保持6km/h的速度。另外,除去使用者个人的质量,还应该在载质量上额外加入使用者携带物品的质量。
该车为短距离行程代步车,行驶里程的设计必须综合使用者的一般目标行驶里程、每次为小车充电时间间隔,以及电池的电容量和体积大小的关系。如果电池容量过大,虽然行驶里程和充电间隔时间会加长,但是由于体积过大,使得小车失去了原有的轻便性。
综上,本车的设计目标参数如表1所示。

表1 设计目标参数
1.2电机的选择
按所用电机的种类,电动车驱动分为直流有刷电机驱动和直流无刷电机驱动。直流有刷电机控制简单,启动、加速平稳,调速性能良好,然而由于其换相时需要换向器和电刷,机械磨损严重,需要定期维护,且效率偏低。直流无刷电机用电子换相电路代替换相机构实现换相,提高了效率,且其体积、质量小,启动加速较直流电机快。当前市场上直流有刷电机正在被直流无刷电机取代。
按电机转子是否通过机械机构驱动轮毂,电动车驱动分为无齿驱动和有齿驱动。无齿驱动是电机转子直接驱动轮毂转动,其驱动效果完全取决于电机的机械特性和控制方式,为了增强电机的启动、爬坡能力,启动时电流应足够大。相关试验结果证明:电动车在坡度为15°的路面行驶且负载2人时,其电流需达30A。然而长时间过大的启动电流会引起电机退磁、蓄电池过放电和控制器烧坏,所以必须对这两方面因素进行折中考虑,希望在较小的电流下实现比较大的转矩输出。当前市场上的电动车大多采用直接驱动方式,其限流值根据蓄电池容量为12~20A,启动时间达20s,启动时间过长,爬坡能力不足。有齿驱动是利用减速齿轮机构的减速增扭作用,使得在相同电流下输出到轮毂的转矩为无齿驱动的数倍,从而有效解决了电流和转矩的矛盾。然而在有齿驱动方式下,电机转子经常工作在3 000~5 000r/min,使得电机齿轮磨损严重,维护成本变高。
直流无刷电机低速直接驱动配置方式的缺点:① 启动、加速缓慢,爬坡能力不足。直接驱动方式由于没有变速机构而直接驱动电机转动,所以整车对于不同道路的适应能力只能完全取决于电机的动力性能——转矩、转速特性,而电机在启动时固有的低速大电流特性,使得低速大扭矩的迎风或爬坡等行驶能力受到很大限制。② 整车故障率高。由于启动、加速能力差,电动车在遇到上坡路时只能通过增大电流来增大爬坡能力,使得电机经常工作在大电流状态下,发热严重,特性变差,退磁加快,寿命降低。同时控制器开关器件经常工作在大电流状态下,使得故障率升高。③ 蓄电池寿命降低。由于启动、加速、上坡时电机母线电流过大,使得蓄电池经常处于过放电状态,甚至达到2C、3C放电,严重降低了蓄电池的寿命。据统计,目前电动车蓄电池价格占整车价格的1/3,而寿命不到2年。④ 整车效率低、续航里程短。由于母线电流经常处于较大值,使得电机铜耗增大、发热量变大、效率下降。同时,由于爬坡能力有限,爬坡速度慢,使得电机大电流上坡时间过长而浪费电量,导致续航里程变短。
综上所述,当前电动车存在的问题是启动速度慢、爬坡能力不足、效率低下,其本质是电流和转矩的矛盾,希望用较小的电流实现较大的转矩输出。采用高速电机加齿轮减速驱动方式能有效解决这一问题。然而当整车轻载高速运行时,转子速度太高,造成机械损耗太大。经上述分析,选择直流无刷减速电机或者直流无刷行星减速电机。
设车速为v(km/h),车轮半径为r(m),则车轮转速n(r/min)和车速之间的关系为
(1)
已知最高车速为10km/h,若车轮直径设计为0.064m(2.5英寸),则根据式(1)计算得到在最高车速时车轮转速为
(2)
考虑实际情况,70kg的成年人驾车爬5°坡时速度为6km/h,则

(3)

70×10×sin5°)×6=0.139
(4)
(5)
式中:P为总功率;PN为电机额定功(kW);nT为传动系效率0.90 ~ 0.92;m 为最大总质量(kg); f 为滚动摩擦因数;umax为最高车速(km/h)。
T=(mgfcos5°+mgsin5°)=(70×10cos5°+
70×10sin5°)=1.838 9kW
(5)
(6)
根据以上计算,得出代步车的电机基本设计参数,见表2。

表2 代步车电机基本参数
结合以上参数,本车选择上海绿色动力机电有限公司生产的57ZW24-100型直流无刷行星减速电机,该电机符合本车对于电机参数的基本要求。根据所选电机,选择配套的DBLS-01直流无刷电动驱动器。
1.3电池容量
电机为24V直流电机,该车要求续驶里程15km。设续驶里程为X,则
(7)
式中:V为电池电压(V);C为电池容量(Ah);ηM,ηI,ηT分别为电机、逆变器、传动系统效率;λ为放电深度; ∑F为行驶过程中所有阻力之和。
4.134 6 Ah
(8)
经计算得到,在不影响车辆体积的前提下,电池容量至少为4.134 6Ah。
与铅酸、镍氢等电池相比,锂离子电池具有电压高、比能量高、循环寿命长、自放电率低、无记忆效应等优点[3],因此选用锂电池作为该车的电源电池。
2 控制系统设计
该车的控制系统由电源稳压模块、单片机最小系统板MK60DN512、电机驱动模块、传感器、电压放大器等组成。为了方便程序调试,添加了蓝牙串口模块,可以将压力传感器采集到的实际电压和车轮转速脉冲反馈到电脑上。
使用者脚下的电压由压力传感器采集,经由电压放大芯片放大,传输至单片机ADC模块引脚。单片机ADC模块进行数模转换,将电压转换为数值输入控制系统。经过单片机控制系统处理后,再由FTM模块将数字信号转化为PWM信号,传输给电机驱动器,电机驱动器进而控制电机转动及其转速。电机驱动器将电机转速脉冲信号传回至单片机以供单片机对车速进行分析。
另外添加了蓝牙串口模块。串口蓝牙模块的主要功能是使用蓝牙通信作为物理层替代传统异步串行通信中的TX和RX导线,从而实现无线异步串行通信。使用蓝牙串口模块可以将单片机中读取的电压值和编码器读取的转速脉冲无线反馈到电脑上,方便设计者读取数字做进一步的控制分析。该车的控制系统硬件连接如图2所示。

图2 控制系统硬件连接
3 软件设计
该车是利用左右车轮的转速差来实现转向的,当人站在小车上时,左右脚的压力并不能掌握得非常精准。当使用者想直行的时候,由于左右脚的压力有一些小的偏差,导致小车会进行转向,此时,人会由于无法掌控小车而失去平衡。所以,该车的控制算法既要保证左右转速随着压力的大小而变快或变慢,又要考虑到人对脚下压力掌控的能力,故采用电压差来控制转向的模式。即根据左右车轮的电压差来判定小车是左转、直行还是右转。
该车是利用左右车轮的转速差实现转向。左右车轮在轴承上固定,只能转动,不使用舵机。由于使用者在车上双脚站立,在保持平衡的同时很难精确把握脚下的压力,若直接使用单片机采集的信号原始值作为转速信号输出的话,小车的转向将会变得十分不稳定,并且小车保持直行也会变得非常困难。所以,该车采用左右压力传感器电压采集值的差值作为小车是否直行或进行各种角度转弯的基础依据。当左右电压差在0~ 1V时,令左边车速=右边车速=(左边车速+右边车速)/2,从而保证即使使用者的左右脚压力不相等也能保持稳定的直行。转角信号的变化会随着车速的加快而减少,即使左右电压差一致,当转速不同的时候,给左右车轮的速度差也不一样,这样有效控制了转向的平稳性。在转弯工况中,在程序中输入电压差与目标转速的对应关系,在每一种工况中都赋予左右车轮不同的转速差,则可根据驾驶人的需要完成不同程度的平稳转向,转弯工况的设计将在下文中详细介绍。该车的软件控制流程如图3所示。
3.1转向控制
首先,假设左车轮的车速为0,右车轮以一固定转速转动,则车的运动轨迹是一个圆,圆的半径即为车的宽度L2,如图4所示。

图3 软件控制流程

图4 代步车运行轨迹1
然后,假设左右车轮以不同的固定速度运行,且左边的速度VL>右边的速度VR,则小车的运行轨迹是一个同心圆,如图5所示。

图5 代步车运行轨迹2
设左轮在1s内转过的路程为S1,右轮在1s内转过的路程为S2,则
(9)
截取1s内小车行驶的转角,取同心圆中的一个扇形,根据扇形公式得
(10)
因为2个扇形的圆心角相等,故
(11)
因为PIT定时中断的时间设为1,单片机每1s读取1次电机的转速,所以积分上限设为1。
S1和S2已知,则
(12)
转向半径L=L1+L2。
已知转向半径L和左轮行驶距离S1,根据扇形弧长公式计算转向角α:
(13)
求得左右车轮速度对应的转向角α,对小车的转向控制分析起到了至关重要的作用。
掌握了该种小车的转向角计算方法,然后可以对转向工况进行设计。首先,由蓝牙串口模块记录使用者在正常使用本车时左右电压的压力差变化的数值分布情况,经过整理与分析之后,得到符合大多数使用者的电压差与目标转角的对应关系。将对应关系作为判断使用者意图的依据确定目标转角。
设定3个参数为目标转角α目标、实际转角α实际和目标转角与实际转角的差值Δα。实际转角是根据串口读取的左右车轮转速运用转角计算公式算出的小车目前的实际转角;目标转角是利用电压差与目标转角的对应关系找出的符合使用者意图的目标转角。在程序中,根据目标转角与实际转角的差值,可计算输出目标转角的左右车轮控制电压信号,直至Δα为0。转向控制流程如图6所知。
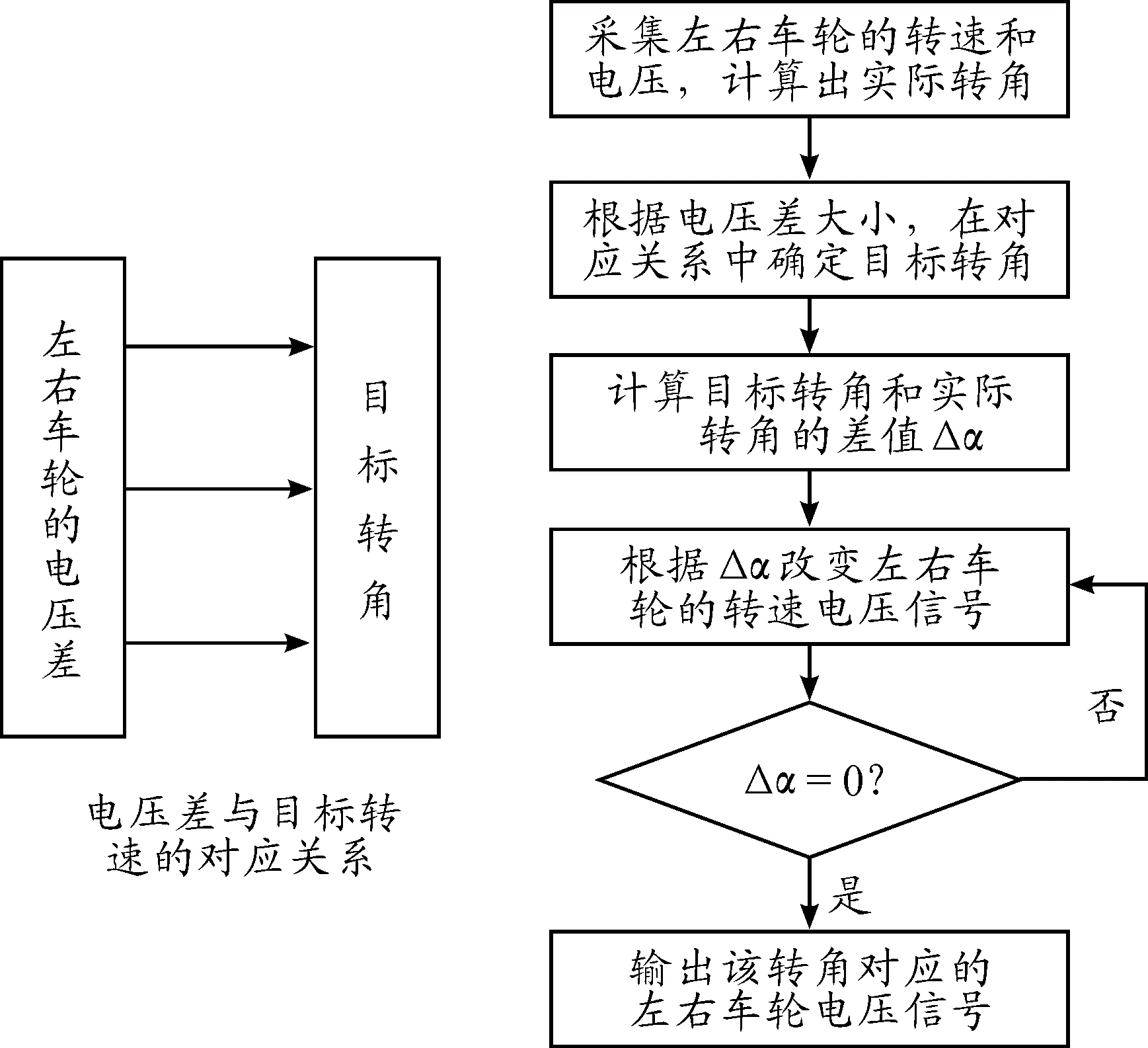
图6 转向控制流程
3.2起步工况控制策略
由于该车是通过双脚踩压力传感器来控制电机转动的,所以当单脚踩在压力传感器上而另一只脚悬空时容易发生意外,在起步时需要采取必要的安全措施。在程序中加入起步工况,写入if函数,在其中1个压力传感器无数值的时候,令2个压力传感器的电压值都为0,这样小车的2个电机都不会转动。
此外,在起步加速时,为了防止小车加速过快而导致使用者重心不稳的情况发生,在加速过程单片机读取车轮转速时,当车轮转速较低时使用延时使小车缓慢加速,保证了小车的起步平稳性。
将延时启动的程序写入中断,中断触发的条件基于单片机读取的车轮转速。只有当前转速低于某一设定值时,即当控制器判定此时为小车刚起步的状态才会出发该中断,使小车缓慢起步。
3.3基于PID算法的电机调速控制
PID控制器是过程控制中应用最为广泛的控制方法[5-9]。PID控制是一种由比例、积分、微分基本控制规律组合的复合控制[6]。比例环节能够减小系统的响应时间,快速减少偏差,但是容易引起超调;积分环节主要用于消除静差,提高系统控制精度,但是会影响系统的响应速度;微分环节能在偏差变得太大之前引入一个修正,从而加快系统的响应速度,减少调节时间[10-12]。PID控制系统的原理如图7所示[13]。

图7 PID控制系统原理
PID控制规律可表示为
(14)
式中:u2和u1分别是控制器的输出和输入,其输入信号u1在反馈控制系统中一般为去偏差信号e(t);KP为控制器的增益;TI为积分控制时间常数;TD为微分控制时间常数。
对式(14)进行拉式变换得:
(15)
采用齐格勒-尼克斯第二设计方法来进行PID控制器的参数初步调整。先假设TI=∞,TD=0,即先保留比例控制Kp。然后由0逐渐增加调整比例系数Kp的值,直到系统输出首次出现持续等幅震荡为止。这时对应的调整值Kp取为Kp=Kc,并记下震荡周期TC。根据获得的临街增益Kc和TC,齐格勒-尼科尔斯法又给出了计算PID控制参数Kp、KI、KD值的公式,如表3所示。

表3 齐格勒-尼科尔斯法第二设计方法
此时,PID控制器的传递函数为
(16)
PID的控制率为
(17)
4 样机开发与系统调试
开发出的便携式电动代步车整车实物如图8所示。利用Matlab对该车转弯时的转角进行分析,进而可对小车的转向平稳性做一个判断。在该车运行的过程中,利用蓝牙串口模块将采集的电压传感器电压值和转速信号传输至电脑绘制成表格。使用Matlab将转角计算步骤编辑成M文件。将绘制的表格导入Matlab,计算出每一组数据对应的转角,绘制成图表进行转向平稳性分析。

图8 整车实物
用蓝牙串口模块采集代步车在行驶S形路线中不断来回转向的工况信息,绘制表格。利用转角计算M文件将每一组数据的转角计算出来,以时间t为横轴,转角值为纵轴绘制图表,如图9所示。
从测试结果可以看出:小车在走S形路线时,无论S路线弯度的大小如何,转角值变化较平稳,没有出现转角数值的突变。在图9中,转角值的变化较为流畅,没有在上升或下降的过程中出现数值波动的情况,表明在左右某一方向的转弯中不会出现因为控制算法问题而导致的非使用者意愿突然更改转弯方向的情况。
样机起步平稳,转向操控灵活,符合设计预期,验证了理论分析的正确性及所开发的电控系统软硬件的有效性。
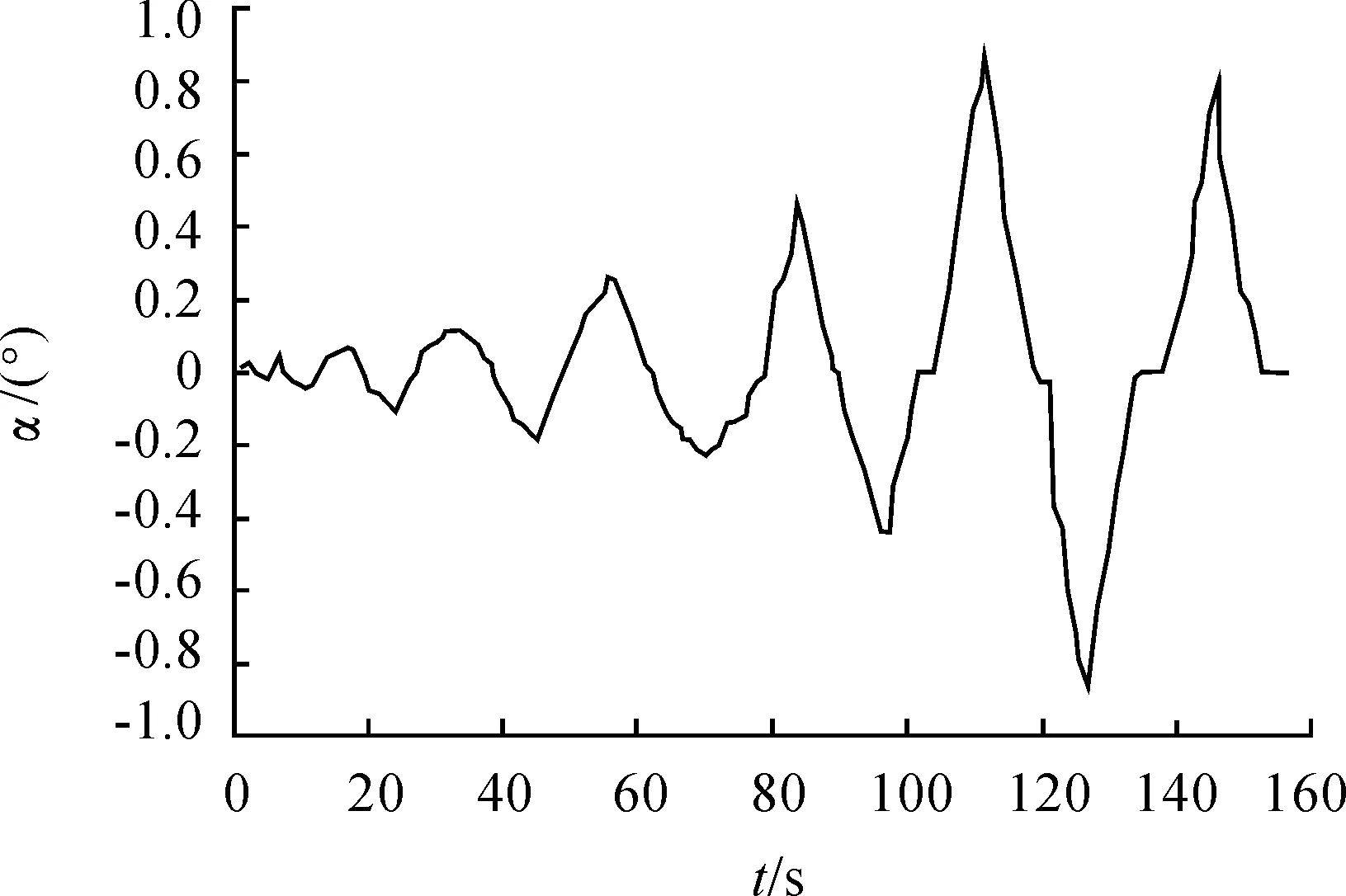
图9 代步车转角变化
5 结束语
针对现有电动代步车操作及携带不便的问题,设计了基于双电机驱动的新型便携式电动代步车,并对该电动代步车动力系统参数进行匹配设计。
针对双电机驱动下无舵机转向的控制问题,分析了双电机驱动下无舵机转向原理,建立了双电机驱动无舵机转向数学模型。
基于k60单片机设计开发了新型代步车电控系统硬件,对代步车的起步、直行和转弯等工况下的控制策略进行了设计,并开发出控制软件。
开发的电动代步车样机通过试验验证,证明了理论分析的正确性及电控系统软硬件的有效性。
[1]杨淼.乐行天下B轮融资1亿元 2014年销售量预计超3亿[EB/OL].[2015-02-15]. http://www.imscv.com/.
[2]周羽.2015年广东平衡车出口销量升幅超过200%[EB/OL].[2016-03-22]. http://news.cnr.cn/native/city/20160315/t20160315_521611271.shtml.
[3]许晓雄,邱志军,官亦标,等.全固态锂电池技术的研究现状与展望[J].储能科学与技术,2013,2(4):331-341.
[4]余志生.汽车理论[M].5版.北京:机械工业出版社,2009:1-27.
[5]A STROM K J, HAGGLUND T. THE Future of PID Fontrol[J].Control Engineering Practice 2001,9:1163-1175.
[6]DESBOUROUGH I,MILLER R. Increasing Customer Value of Industrial Control Performance Monitoring_Honeywell s Experience [J].AJChE Symposium Series,2002,98(326):153-186.
[7]吴文海, 汪节, 高丽,等. 基于模糊自整定PI D的着舰引导控制器设计[J]. 四川兵工学报, 2014(7):71-74.
[8]赵昌友. 基于模糊PID中药材干燥温度控制系统设计及仿真[J]. 重庆工商大学学报(自然科学版), 2015, 32(9):81-86.
[9]段云龙. 基于模糊自适应PID控制的弹药公路运输模拟系统的仿真[J]. 四川兵工学报, 2014, 35(1):80-83.
[10]李红岩,侯媛彬,王秀.实现温度自动调节的模糊控制器设计[J].计算机技术与发展,2006,16(3):149-151.
[11]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011,30(1):166-172.
[12]谭跃刚.控制工程基础[M].北京:电子工业出版社,2013.
[13]杨智,朱海峰,黄以华.PID控制器设计与参数整定方法综述[J].化工自动化及仪表,2005,32(5):1-7.
[14]姜立标,何家寿.两轮自平衡代步车控制策略及动力学仿真[J].华南理工大学学报(自然科学版),2016,44(1):9-15.
(责任编辑刘舸)
NewDesignandDevelopmentofElectricScooterSteering
KANYing-zhe,LUOYong,LONGKe-jun,XIEXiao-hong,CHENXin
(CollegeofVehicleEngineering,ChongqingUniversityofTechnology,Chongqing400054,China)
Aimingtheexistingscooter,thatcarbalancevolumeisbigger,andqualityisheavyandneedsacertainamountoftimetolearntomastertheabilitytodrivetheproductatthemarket,wedesignedasteeringandmoderatespeedwithsmoothandflexible,andsmallvolumeandlightqualitynewscooter.Basedontheprincipleoflightandpractical,themechanicalstructureandtargetparametersofthevehicleweredesigned.Inviewofthecharacteristicofsteeringwithoutusingthesteeringgear,thecalculationmethodofthesteeringanglewasstudied.Atthesametime,thehardwareandsoftwareofthecontrolsystemweredesignedandimplementedinordertoachievethestabilityofthesteering.Finally,PIDcontrolwasusedtorealizethestabilitycontrolofthemotor.Testsontheprototypeshowthatthescooterhasreasonablestructure,simpleoperationandiseasytogetstarted,stablerunning,andcanmeettheneedsofthemajorityofusersonthecarinsteadofwalkingfunction.
newscooter;designofsteering;anglecalculation;PID
2016-04-16
国家自然科学基金青年科学基金资助项目(51305475);重庆市基础与前沿研究计划项目(cstc2013jcyjA60004);重庆市教委科学技术研究项目(KJ1500927)
阚英哲(1991—),男,山东枣庄人,硕士研究生,主要从事车辆工程研究;通讯作者 罗勇,男,博士,副教授,主要从事车辆工程研究,E-mail:luoyong@cqut.edu.cn。
format:KANYing-zhe,LUOYong,LONGKe-jun,etal.NewDesignandDevelopmentofElectricScooterSteering[J].JournalofChongqingUniversityofTechnology(NaturalScience),2016(9):10-17.
10.3969/j.issn.1674-8425(z).2016.09.002
U462
A
1674-8425(2016)09-0010-08
引用格式:阚英哲,罗勇,龙克俊,等.新型无舵机转向电动代步车设计与开发[J].重庆理工大学学报(自然科学),2016(9):10-17.
