机车轴重调整的研究
2016-10-20姜明昊
姜明昊
(中车北京二七机车有限公司,北京100072)
机车轴重调整的研究
姜明昊
(中车北京二七机车有限公司,北京100072)
建立了四轴、六轴机车力学及加垫模型,研究了加垫量求解的方法,提出了广义逆矩阵的求解方法,并结合机车轴重调整的实际问题进行分析计算,有效地完成了轴重调整工作,为加垫量求解的深入研究奠定了基础。
机车;轴重调整;加垫;广义逆矩阵
机车轴重、轮重及允差是机车的重要参数,直接影响着整车的粘着性能。虽然在设计时进行了机车轴重预分配,但由于零部件实际重量与设计重量存在偏差,工艺辅料预估不准确,零部件加工误差及安装调整等原因,使得轴重、轮重分配超差。机车的轴重、轮重偏差过大,在机车牵引时导致机车粘着利用率降低,易发生空转;在机车制动时影响制动效果,易造成轮轨擦伤。为了保证机车粘着重量与运行安全,满足轴重均衡性要求,需要进行机车轴重调整。
机车轴重调整方法一般为:先通过加均重铁的方式调整前、后转向架的轴重,然后通过一系、二系加垫的方法进行轴重及轮重调节。前者是使用刚体力学理论进行计算均重铁的重量及力臂,本文主要针对后者进行研究。
陆冠东提出了轴重调整的理论方法[1,2],为后来的轴重调整工作提供了基础;张正楠将其推广为左右轮重分析理论[3]。在实际加垫调整方法上,张正楠使用线性规划的方法解决加垫优化问题;韩为民等使用MATLAB自带极小化极大值函数解决加垫问题[4]。目前的调整方案存在调整不直观,不能充分考虑轴重、轮重偏差,造成多加垫情况,且计算结果往往存在偏差较大的问题。本文研究了更为直观简便的加垫调整方法。
1 模型的建立
本文广泛针对四轴机车、六轴机车进行轴重调整,综合考虑左右轮重进行分析。
1.1假设与基本几何参数
为便于机车力学模型的简化,对机车做如下假设:
(1)转向架和车体为刚体,且各部位相同部件的支承面处于同一平面;
(2)一系、二系悬挂的各组弹簧的垂向刚度分别相等;
(3)不考虑沿机车纵轴线力矩与载荷的变化、位移与转角;
基本几何参数含义如下:
k1为系刚度(kN/mm);
k2为二系刚度(kN/mm);
L为转向架定距之半(mm);
L1为转向架轴距(六轴),转向架轴距之半(四轴)(mm);
L2为旁承距转向架中心距离(mm);
L3为旁承距转向架中心距离(mm);
L4为系弹簧横向距离之半(mm);
L5为二系旁承横向距离之半(mm)。
1.2力学模型
设线性位移向下为正,转角顺时针为正,建立力学模型。
前转向架:中心垂直位移为x1,绕横轴转角为α1,绕纵轴转角为γ1;
后转向架:中心垂直位移为x2,绕横轴转角为α2,绕纵轴转角为γ2;
车体:中心垂直位移为y,绕横轴转角为β1,绕纵轴转角为β2;
(1)四轴机车力学模型(图1所示)
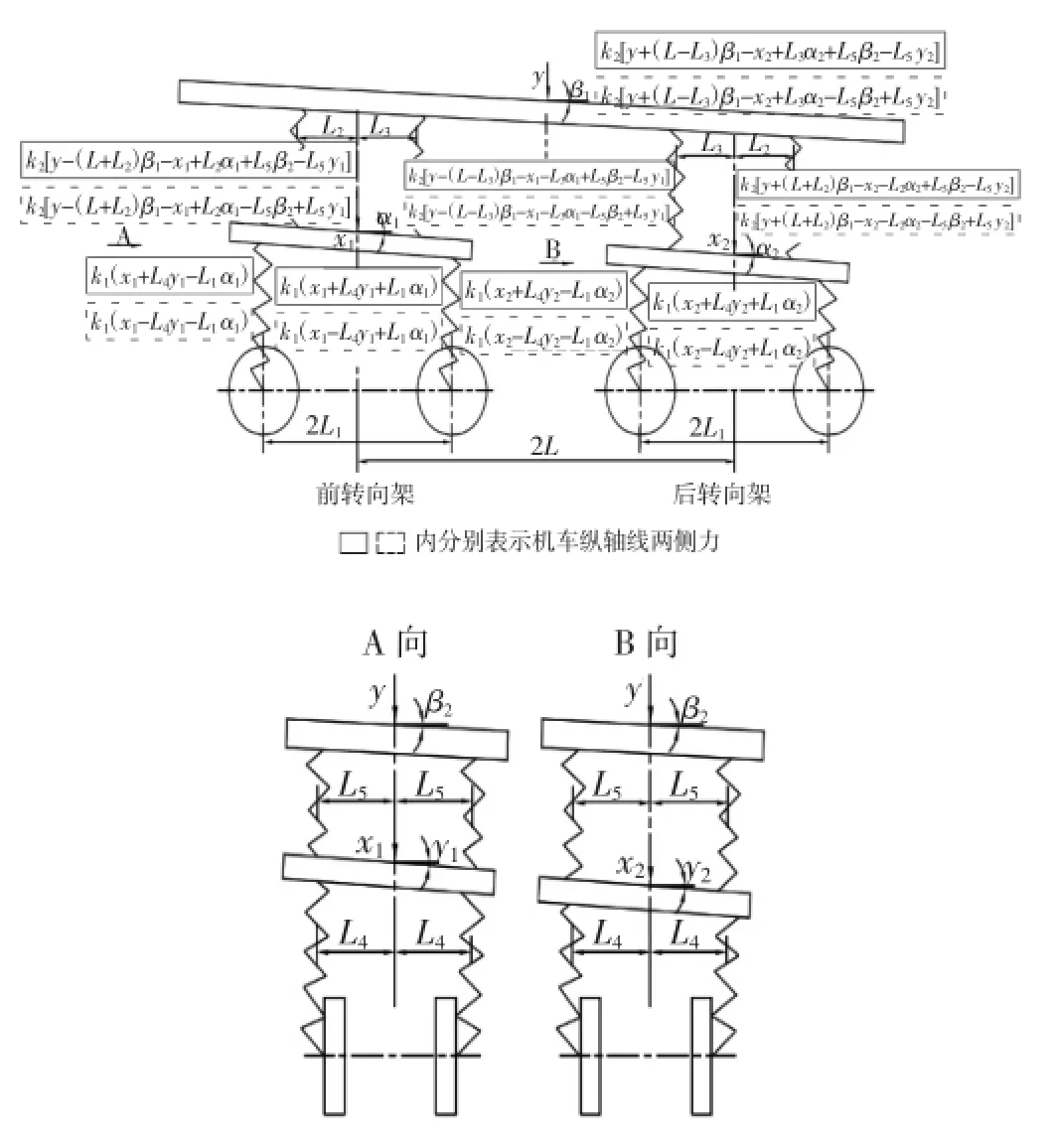
图1 四轴机车力学模型
(2)六轴机车力学模型(图2所示)
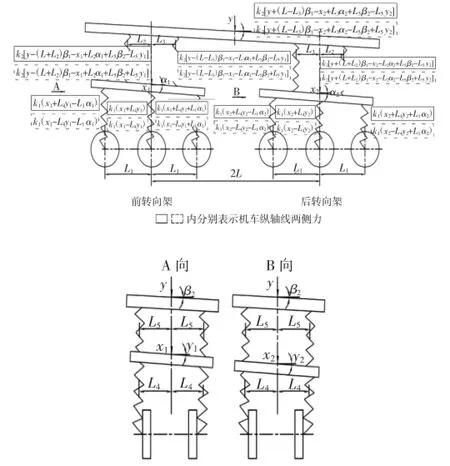
图2 六轴机车力学模型
1.3加垫模型分析
以六轴机车考虑左右轮重为分析对象,四轴机车分析过程可以类比,不再赘述。
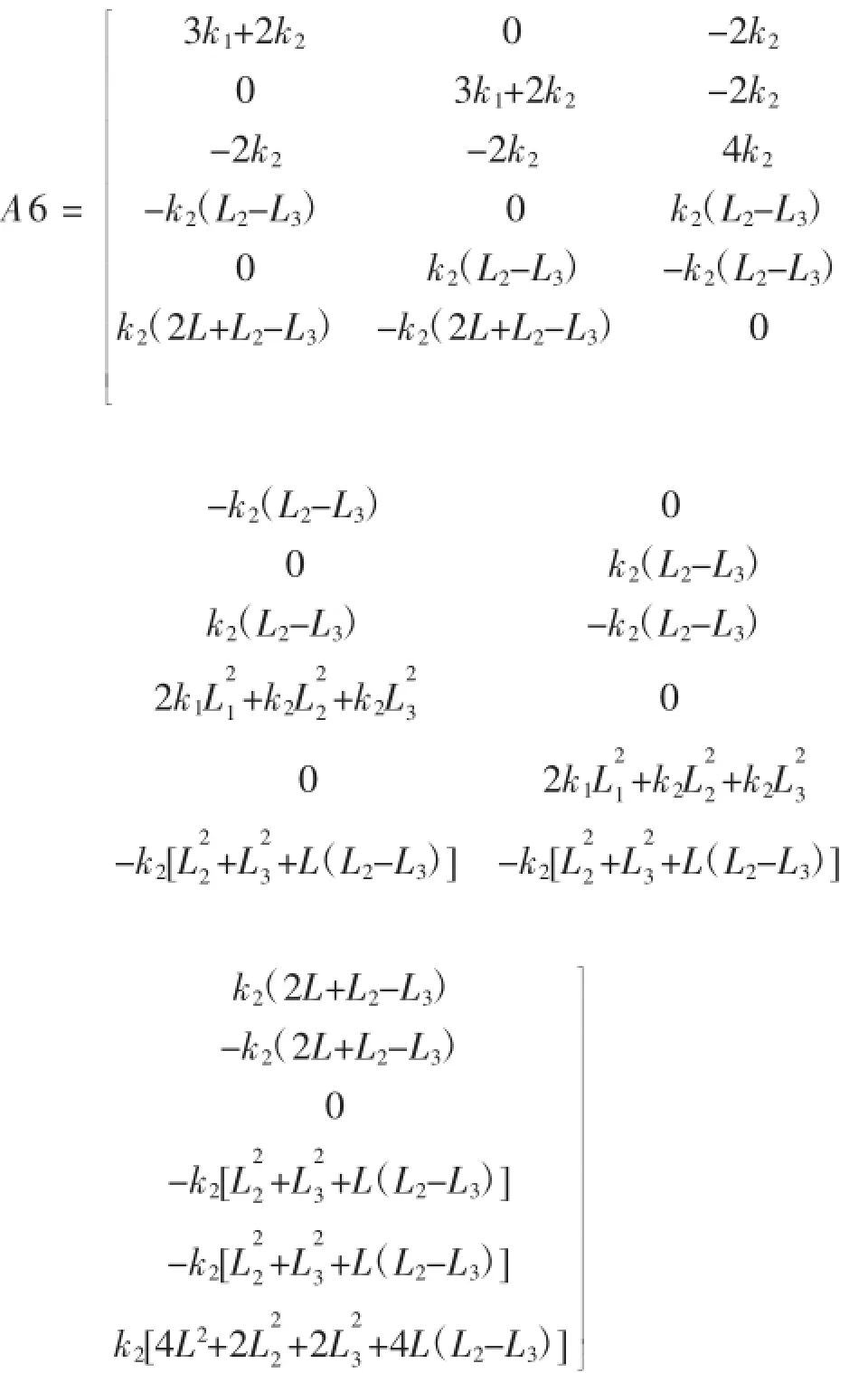
刚度矩阵A6(不考虑左右轮重)[1]
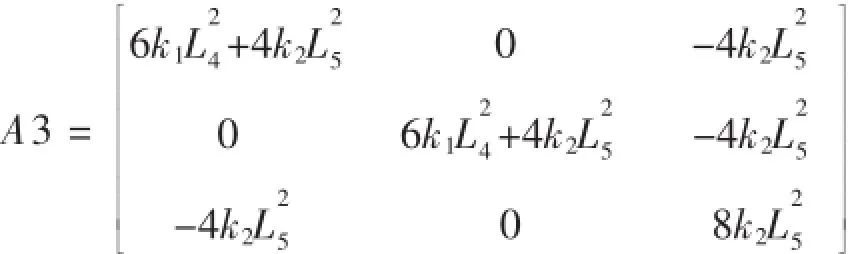
横向刚度矩阵A3

令F=k1(SA-MD+JD),则方程组简化为

其中:P为期望的增减载矩阵;A-为A的逆矩阵,因为A为满阶方阵,A-是存在且唯一的。δ为加垫量列阵D为加垫位置矩阵;S为系数矩阵;M为外力系数矩阵;J为单位矩阵其中E12表示12阶单位矩阵,O表示零矩阵。
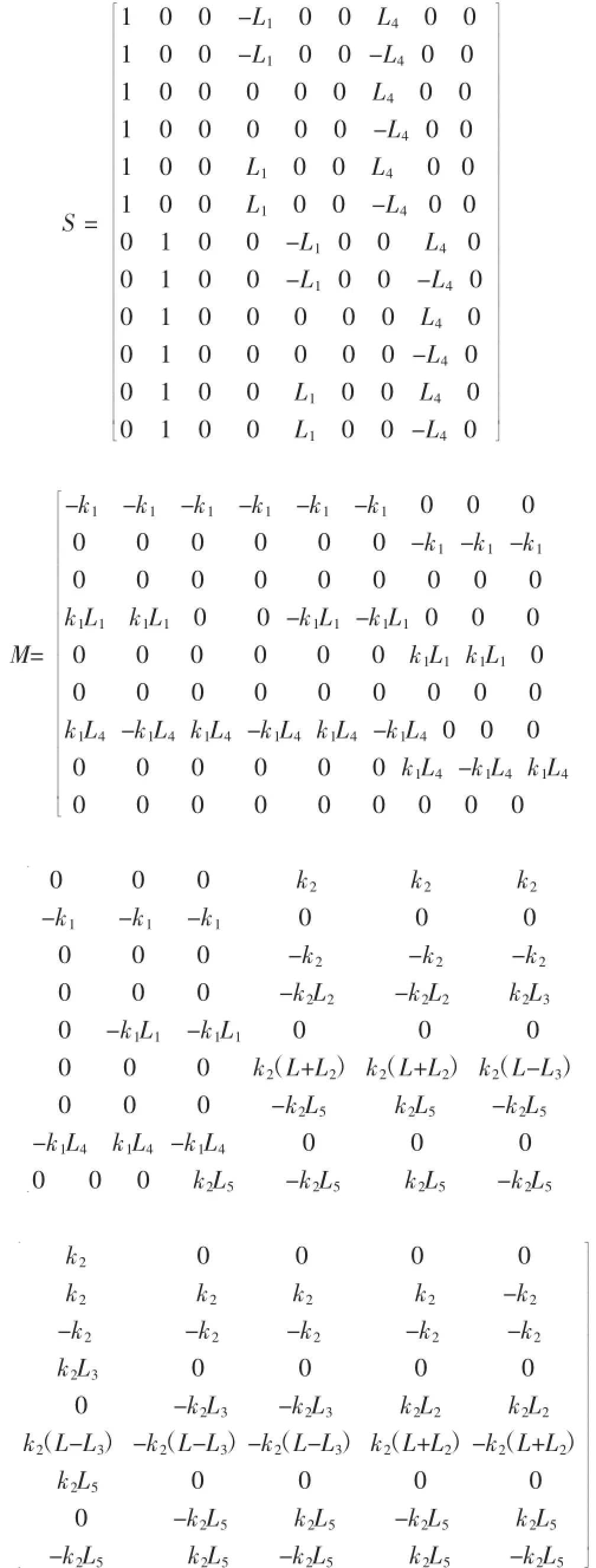
以六轴机车为例,当只在一系加垫,δ是12×1列阵,D为20×12矩阵当只在二系加垫,δ是8×1列阵,D为20×8矩阵当同时在一系和二系加垫,δ是20×1列阵,D为20×20方阵,D=E20.
2 加垫量求解研究
根据线性代数知识,P=Fδ为线性方程组。通过实际计算,无论是在一系、二系加垫,还是一、二系全加垫情况,数据表明说明上述方程组无解。要满足轴重误差要求,就必须找到近似解。
在寻找近似解的过程中,进行了以下几种方法的研究:使用MATLAB极小化极大值函数求解[5];带约束条件的遍历求解[5];广义逆矩阵求解[6]。
轴重调整的目标是:满足轴重、轮重偏差前提下,单簧加垫量最大处的垫厚最少,总加垫量较少。
(1)当使用MATLAB极小化极大值函数方法时,根据约束函数不能直接反映目标值,造成了加垫量计算不准确,并且不易收敛。
(2)当使用带约束条件的遍历方法时,可以灵活调用编写的子程序,方便改变轴重、轮重偏差值条件,改变步长、上下限值等,可以更好的通过约束函数反映目标值,如果有解可以得到一组最合适的解。缺点是计算时间较长,且给出的上限值一般要作出调整。
(3)当使用广义逆矩阵方法时,可以找到一组最佳逼近解,使其最大满足约束条件。
由于F矩阵的伪逆矩阵F+的性质如下:

F+同时是F的最小范数广义逆和最小二乘广义逆。
而且,F为满秩方阵时,则F的伪逆矩阵就是F的逆矩阵,F+=F-.
因此,对于不相容的方程组P=Fδ,δ=F+P是极小范数最小二乘解,或最佳逼近解。
这样就可以将问题转化为求解F+的过程,可以使用最大秩分解的方法和MATLAB自带pinv()函数的方法求解[5]。
3 实际加垫调整讨论
在进行种型式机车加垫调整轴重过程中,综合使用遍历求解法和广义逆求解法相结合,但广义逆求解法更加方便快捷。
由于广义逆求解法计算得到的加垫量δ元素非正整数,但实际上最薄的垫也只有0.5 mm,因此必须在该结果的基础上进行调整,将调整后的加垫数值通过P=Fδ计算得到轴重、轮重变化情况,即需要进行正向校核。
为了使得计算过程更加直观、简洁,使用excel表格进行计算,计算界面如表1所示,可以更加清晰的调整加垫量,直观的反映调整结果。
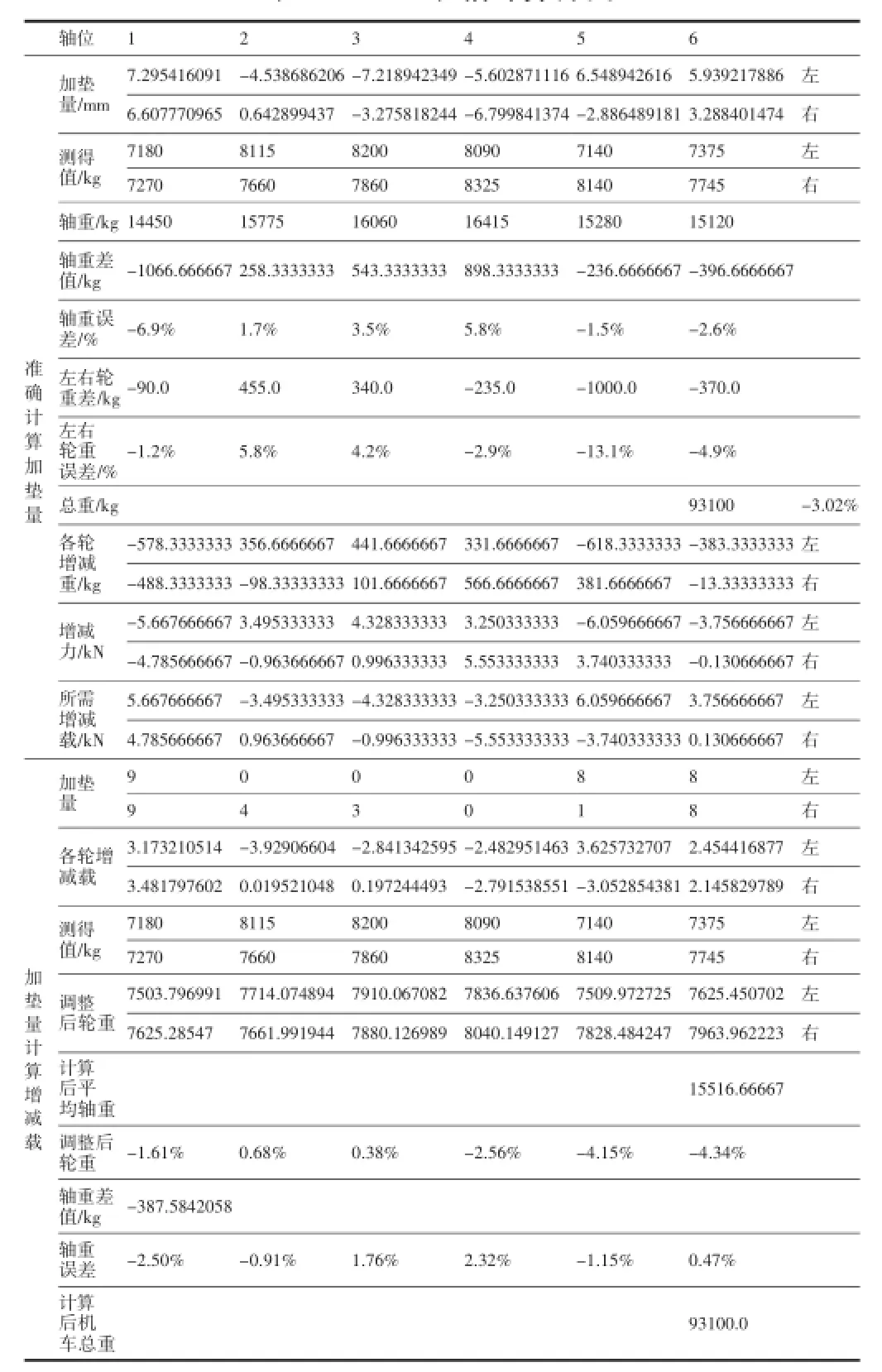
表1 excel表格计算界面
通过使用该方法对出口苏丹的六轴机车、出口坦赞的四轴机车、地铁内燃调车进行加垫轴重调整,均一次性加垫调整成功,机车轮重及轴重误差均满足要求。
4 结束语
本文建立了四轴、六轴机车加垫调整轴重的基础模型,分析研究了加垫量的求解方法,得出了可以实际应用的简单易行的计算方法。该方法在实际调整多种机车轴重、轮重过程中,取得了良好的效果,提高了称重试验的效率,缩短了调整试验的时间,节约了成本。本文的研究也为加垫量求解的深入研究奠定了基础,为加垫调整开创了一种新的方式。
[1]陆冠东.机车轴重转移和理想牵引高度的计算与分析[J].内燃机车,1986,(11):20-25.
[2]陆冠东.机车轴重调整的计算与分析[J].内燃机车,1988,(7):1-6.
[3]张正楠.调整机车轮重的分析和计算[J].内燃机车,1990,(10):26-31.
[4]韩为民,马睿.机车称重调簧算法的研究及应用[J].内燃机车,2008,1(1):19-22.
[5]周建兴.MATLAB从入门到精通[M].第2版.北京:人民邮电出版社,2012.
[6]王永茂.矩阵分析[M].北京:机械工业出版社,2005.
Research on Locomotive Axle Load Adjustment
JIANG Ming-hao
(CRRC Beijing Locomotive Co.,Ltd.,Beijing 100072,China)
In this paper,the four axis,six axle locomotive mechanical and padded model are established.The method of padded quantity solving is studied,generalized inverse matrix solving method was proposed.Combined with the practical problems of locomotive axle load adjustment for analysis and calculation,effectively completed the axle load adjustment,which lays the foundation for the in-depth study of padded quantity solving.
locomotive;axle load adjustment;padded;generalized inverse matrix
U260.2
A
1672-545X(2016)08-0178-04
2016-05-02
姜明昊(1984-),女,吉林长春人,工程师,工学硕士,研究方向为转向架开发设计。
