一种基于PVDF的车辆动态称重系统设计
2016-10-20杨俊夫韦俊覃力更张孟军谢晋全刘崇章
杨俊夫,韦俊,覃力更,张孟军,谢晋全,刘崇章
(广西大学机械工程学院,广西南宁530004)
一种基于PVDF的车辆动态称重系统设计
杨俊夫,韦俊,覃力更,张孟军,谢晋全,刘崇章
(广西大学机械工程学院,广西南宁530004)
针对高速公路车辆超载问题,设计了一种基于PVDF的车辆动态称重系统。首先介绍了动态称重系统的硬件系统,然后比较了三类压电传感器优缺点,简述了PVDF传感器的安装,给出了电荷放大器以及信号采集器等硬件的选择,并对软件系统的设计流程进行了分析。最后设计了动态称重系统试验,对系统进行了验证。
动态称重;压电传感器;PVDF;软件
当前我国交通运输量呈现出快速上升趋势,随之而来的超载超限现象越来越严重[1]。超载超限车辆不但会对现行路面以及桥梁带来严重的破坏,也会给行车安全带来巨大隐患。动态称重系统(Weight In Motion,简称WIM)可以有效帮助我国交通部门整治车辆超载超限现象。目前国内使用较多的动态称重系统是应变式轴重秤,应变式轴重秤采用的是应变式传感器,系统的动态测量精度较高,但车辆通过传感器的速度须小于10 km/h,实际应用中一般为5 km/h,适用于低速动态称重,在高速动态称重中误差较大[2]。除应变式传感器的动态称重系统外,还有电容式传感器、光纤传感器以及压电式传感器动态称重系统。电容式传感器,它易受电磁干扰,寿命低,使用一段时间后由于电容器内填充介质变形,需重新校正,在动态称重系统中应用的比较少。光纤传感器的制作技术复杂,价格昂贵,目前还处在研究试用阶段,在动态称重系统中并没有投入实用。压电式传感器则具有响应速度快、体积小且易于安装,使用寿命长,价格低,技术简单容易实现的优点。本文采用了压电式传感器设计了一种动态称重系统,可以实现高速动态称重,并且施工简单,不会对道路结构造成损害。该动态称重系统由硬件系统与软件系统组成,其整个系统框架如图1所示。
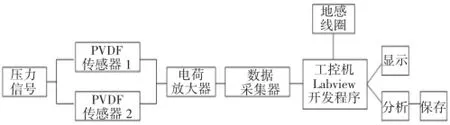
图1 基于PVDF传感器的动态称重系统框图
1 硬件系统设计
1.1硬件系统组成
动态称重系统主要由压电薄膜轴(PVDF)传感器、电荷放大器、数据采集器、地感线圈、工控机等组成[3]。PVDF传感器的作用是当车辆轮胎作用在它上面时,将力信号转换为电荷信号并将其输出;电荷放大器负责将传感器采集到的电荷信号放大并将其转换为电压信号;数据采集卡负责将电荷放大器放大后的模拟电压信号转换为数字电压信号,传输进工控机中,再由工控机进行数据处理分析;地感线圈分别安装在传感器前方和后方,当车辆通过时,地感线圈分别触发数据采集卡开始对信号的采集与停止对信号的采集,并将车辆的通过信号传给工控机计算出车速。
1.2传感器的选择
压电传感器具有响应速度快的特点,可实现高速动态称重。压电传感器主要分为压电陶瓷传感器、压电石英传感器和压电薄膜轴(PVDF)传感器三类[4]。
压电陶瓷是具有压电特性的电子陶瓷材料,与典型的不包含铁电成分的压电石英晶体的主要区别是:构成其主要成分的晶相都是具有铁电性的晶粒。压电陶瓷的压电常数很高,一般是石英晶体的几十倍。在湿度大的环境中压电陶瓷传感器的响应特性会变差,甚至失效。实际应用中,压电陶瓷传感器在动态称重方面的应用比较少。
压电石英传感器是利用石英晶体的纵向压电效应将重量信号转换成电信号的装置[5]。其量程范围广,频率响应范围能在低至接近零周,高达十千周的范围内工作;防水、防砂,不需要维护;刚度大,固有频率高,动态响应快;时间老化率低,无热释电现象,工作可靠性高,寿命长;压电石英还几乎不受环境温度限制,对温度的敏感性低;具有较好的线性。压电石英传感器的压电特性非常稳定,但很弱,压电常数小,灵敏度不高,并且压电石英传感器的安装需要用直接埋入路面的方式,因而会受到路面形变的影响,在更换时需要进行路面维修。
压电薄膜轴传感器制作的材料为PVDF(聚偏二氟乙烯),是一种新型的聚合物压电薄膜[6]。其优点在于制作成本低,其膜是薄的、易弯曲的塑料薄膜,其弹性和屈从性是压电陶瓷的许多倍,并且它易加工和处理,重量轻,具有相当宽的频率范围,动态特性与机械性能良好,能够在急剧变化的环境条件下工作。
通过以上压电传感器特性分析,本文选用了压电薄膜轴传感器作为动态称重系统的传感器。采用由美国MEAS公司生产的Roadtrax BL Traffic SensorsⅠ类WIM压电薄膜轴传感器,其型号为2-1005438-Y,由于压电薄膜轴(PVDF)传感器在动态称重时产生的电荷量较少,并且它对电磁信号比较灵敏,所以在动态称重中须对信号线采取良好的屏蔽措施。
1.3 PVDF传感器的安装
为了使压电薄膜轴(PVDF)传感器处于较好的工作状态,又可以对PVDF传感器进行有效的保护,根据PVDF传感器的特点,本文设计了一种夹心式的传感器封装方法。首先把PVDF传感器用环氧树脂固定在一块软胶垫上,然后在传感器的两边用与传感器等厚度的环氧树脂填充,使其不会有突起,再覆盖一层软胶垫在上面,封装成传感器部件,最后再将封装好的传感器部件固定在路面上,如图2所示。
图2 PVDF传感器的封装
当车辆行驶过传感器时,车辆施加在传感器上的力,可分解为横向、纵向和垂直方向的力,但只有垂直方向的力是动态称重所需要的,其它两个方向的力则会对动态称重带来干扰和误差。车辆在正常向前行驶时,沿传感器的横向力可以忽略不计,纵向力的干扰问题可通过采用粘胶固定传感器部件的安装办法来解决。
1.4电荷放大器
一般压电材料的输出信号为电荷信号,而且压电材料自身的电阻是有限的,因此其电荷会慢慢漏掉,需要利用电荷放大器和阻抗变换把信号放大并且转换为容易测量的电压信号,如图3所示为电荷放大器等效电路图,其中Q为当车辆作用于传感器时PVDF传感器输出的电荷量,Amp是运算放大器,Cinp为放大电路的输入电容,Cf为放大电路的反馈电容,Rf为放大电路的反馈电阻,Uout为放大电路的输出电压。

图3 电荷放大器等效电路
根据压电效应,压电材料的输出电荷与对压电材料的作用力成线性关系,即

其中:△Q为压电材料的输出电荷量,△F为作用于压电材料的特定方向上的压力,为比例系数。由图3知,Cf的作用相当于改变了输入阻抗,根据密勒定理,可将反馈电容Cf折合到输入端,又取A为运放开环放大倍数,则其等效电容Cf'=(1+A)Cf,该电容与Cinp相并联,在不考虑正负的情况下,有:

通常A=104~108,因此一般满足(1+A)Cf>Cinp,所以有:

由式(1)和(3)得:

式中反馈电容Cf为固定不变的,因此输出电压Uout和作用力△F成线性正比关系,从而放大电路实现了电荷信号转换为电压信号,并且放大信号的功能。
本系统选用了美国精量公司的LAB AMPLIFIER电荷放大器,该放大器的输入电阻可达1GΩ,满足传感器与电荷放大器的阻抗比。
1.5数据采集器
数据采集器主要负责将电荷放大器转换得到的模拟电压信号转换成为数字信号以便工控机进行数据处理。本系统所采用的数据采集器型号为USB5939,USB5939是一种双通道采集卡,它的A/D转换器类型为AD7321,其转换精度为12位,模数转换速率达到500 ksps,模拟输入阻抗达到10MΩ,并且电荷放大器的输出阻抗较小,所以该A/D转换器可以与电荷放大器有着良好的阻抗匹配。A/D转换器的测量精度达到0.1%,在测量精度上满足整个系统的误差要求。图4为USB5939采集卡的实物图。

图4 USB5939实物图
1.6地感线圈
本系统选用直径0.75 mm的铁氟龙高温软导线制作而成的线圈及伊兰度公司生产的地感车辆检测器。当有车辆经过埋设路面下地感应线圈时,会引起相应的电感量变化,通过检测器进行检测就可以知道有车辆经过,本系统铺设有前后两个地感线圈,通过前后两个地感线圈的检测器输出信号计算出车速和车流量等相关参数。地感应线圈测量精确不受路面路况、天气气候等因素的影响,造价便宜,性价比高。检测器则通过接收地感应线圈电感变化信号,当有车辆经过时,电路闭合,从而向外输出一个开的开关量信号;当没有车辆经过时,电路是断开的,一直向外输出闭的开关量信号。
1.7工控机
系统选用研华IPC-610L工控机,主板为AKMB-G41,CUP采用的是酷睿四核。研华IPC-610L用户界面友好,具有良好的可靠性,在粉尘、高/低温、潮湿、震动等恶劣环境中依然能工作并且具有快速诊断以及良好的可维护性。该工控机还能同时利用各种资源,并支持各种操作系统,多种语言汇编,多任务操作系统,可进行实时在线检测与控制,快速响应动态称重检测状况的变化,及时进行动态称重数据采集和数据处理,能在复杂环境下工作,屏蔽外界干扰,保证系统的正常运行。
2 传感器的铺设方式与动态称重算法
动态称重PVDF传感器的铺设方式如图5所示,其中PVDF传感器1与公路边沿垂直,PVDF传感器2与公路下边沿形成60°夹角。两条传感器铺设形成一个的夹角,采用该铺设方式可以得到车辆各种参数,并且可以进行汽车轮迹横向位置识别。
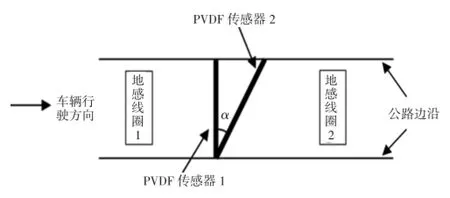
图5 动态称重PVDF传感器的铺设
当2轴车辆经过图5所示的PVDF传感器时,可获得两个传感器的输出波形分别如图6、图7所示。
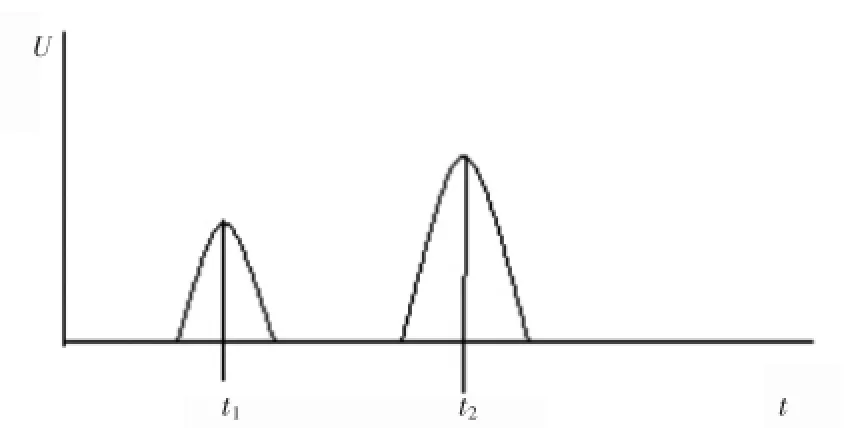
图6 PVDF传感器1的输出波形
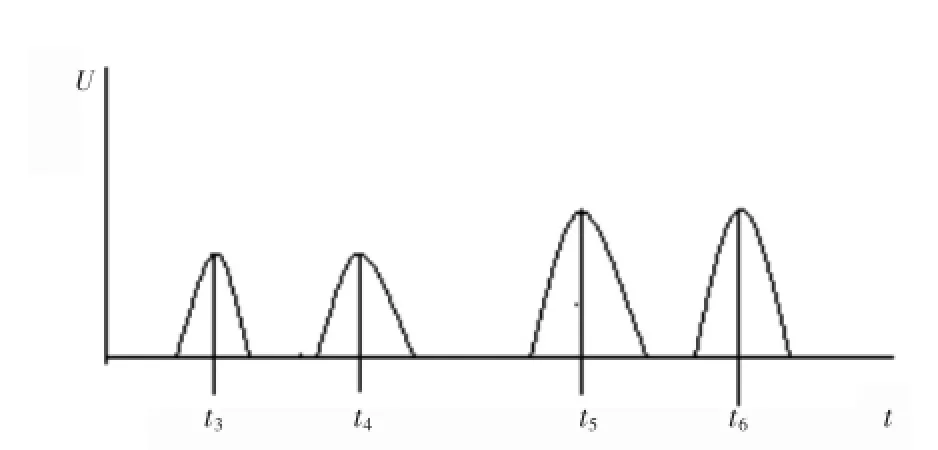
图7 PVDF传感器2的输出波形
如图6所示,t1是车辆前轮压过PVDF传感器1时产生的信号峰值时间,t2是车辆后轮压过PVDF传感器1时产生的信号峰值时间。如图7所示,在t3和t4时的信号峰值分别是车辆前轴右轮胎和前轴左轮胎压过PVDF传感器2时产生的,在t5和t6时的信号峰值是分别是车辆后轴右轮胎和后轴左轮压过PVDF传感器2时产生的信号。由这两个传感器的输出信号可以测出车重。
当汽车车轮压上传感器时,传感器的电压输出从零上升到峰值,当车轮离开传感器时,输出从峰值降到零。脉冲宽度在9 ms~19 ms左右,当汽车行驶速度越快时,脉冲宽度就越窄,由于车辆轴重与传感器输出的电压信号积分面积和速度的乘积之间具有较好的线性关系[7]。所以车辆轴重载荷采用面积积分法来确定,面积积分法的计算方法如下(5)所示,dt,为采集的电压信号对时间的积分;ta为电压信号上升开始时间;tb为电压信号下降结束时间;车速v由地感线圈测得。

系统运行前需要先对调整系数C进行标定。对于压电式动态称重系统来说,传感器固定的程度、路面的情况的不同均会影响C值。在给定W的情况下通过试验对C进行标定,求出的大小:
C=W/(S·v)(6)
利用车辆压过PVDF传感器1可以分别得到前轴重与后轴重,将前后轴重相加便得到车辆总重,当车辆压过PVDF传感器2时可测各车轮重,将前面两个车轮重相加便得到前轴重,同理可得后轴重,前后轴重相加便得到了车辆总重。最后取两个传感器所测车辆总重的均值为车辆重量。由此可获得该车辆的重量信息,实现动态称重。通过取两个传感器所测车辆总重的均值可以提高称重精度。与此同时。前后轴距,左右轮距以及汽车轮迹横向位置也可以通过计算得到,其计算公式如下:
取前后轴距为L1,则

左右轮距为L2,则

右轮距公路下边缘的距离为S1,则

左轮距公路下边缘的距离为S2,则

通过S1与S2从而得知汽车轮胎行驶在公路上的位置,从而可实现对轮迹横向位置进行监测。
结合轴距、轮距以及车辆轮迹横向位置参数,可以帮助识别出车型,按照车型分类标准和超重管理规定,可以有效地判别该车辆是否超载,并统计出路面不同位置上的车流量,帮助探究实现路面的安全运营和寿命评估。
式中:W为汽车轴重;C为调整系数
3 动态称重系统的软件设计
本系统的软件设计主要包括:主程序设计、数据采集、数据处理、显示程序等。软件的设计要遵循模块化、用户化、开放性和网络化、实用经济性等原则。在本系统中,软件设计采用了c++语言及matlab语言进行软件编写,c++程序设计具有开发时间短,效率高,可靠性高,所开发的程序更强壮的优点。由于c++编程的可重用性,可以在应用程序中大量采用成熟的类库,从而缩短了开发时间。matlab则具有强大的数据处理和数据显示功能,数据是matlab操作的主要对象,可靠的数值计算和符号计算功能、强大的绘图功能、简单易学的语言体系以及为数众多的应用工具箱是matlab区别于其他科技应用软件的显著标志。
通过c++语言编写AD7321的数据采集程序,并将采集到的数据传入matlab编写的程序中进行处理,通过小波去噪,对波形进行积分并采用上述公式求得车辆重量及车辆各参数,然后在前面板上显示通过车辆的信息,并进行保存。
系统软件实现的功能有:通过地感线圈的触发来实现车辆的分离;计算车轴重量;根据波形数计算车轴轴数,求得轮距、轴距;通过地感线圈对速度信息进行计算;存储计算数据。软件设计流程如图8所示。称重软件界面如图9所示。

图8 软件流程图

图9 称重软件界面
4 动态称重试验
为了检测该动态称重系统的称重精度,在校内进行动态称重试验,选取了一段车流量少的水泥道路,但由于道路长度较短,所以能达到的最高测试速度有限(≤30 km/h).在试验中选用电动自行车作为行驶车辆来进行动态称重的试验,让电动自行车分别搭载不同重量物件来进行不同速度下的动态称重,记录下动态称重的数据,然后与静态称重的称重结果对比。由于电动自行车前后轴每轴只有一个车轮,由此只按式(5)对系统进行称重试验及车重计算,取两个传感器所测电动自行车重量均值为最后所得的车重。
试验设计为两个工况。在工况一当中,电动自行车的重量在静态下称量为152 kg,其中前轴重量在静态下称量为54 kg,后轴重量在静态下称重为98 kg,电动自行车行驶的速度分别为10 km/h,20 km/h,30 km/h.
工况二中,电动自行车的重量在静态下称量为214 kg,其中前轴重量在静态下称量为76 kg,后轴重量在静态下称重为134 kg,电动自行车行驶的速度分别为10 km/h,20 km/h,30 km/h.
两工况称重结果如表1所示,表中分别列出了在10 km/h,20 km/h,30 km/h三种速度下,工况一、二在电动自行车行驶时的前轴、后轴及整车重量的测量结果,同时还计算出两工况下电动自行车在行驶时的前轴、后轴及整车重量与静态时的前轴、后轴及整车重量的相对误差大小。

表1 动态称重试验测试数据
分别选取工况一前轴,工况一后轴,工况一整车的重量以及工况二前轴,工况二后轴,工况二整车的重量对应不同速度10 km/h,20 km/h,30 km/h取得的相对于静态重量的误差,绘制出在不同速度下两工况的前轴、后轴及整车重量测量的误差分布,如图10所示。
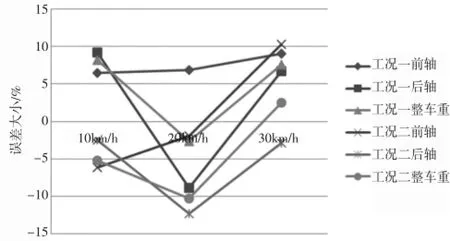
图10 相对误差分布图
根据工况一、二的试验数据以及相对误差分布图可以发现,试验得到的动态称重测量结果相对于静态称重测量的误差在15%内,表明称重系统满足设计要求。
5 结束语
压电薄膜轴(PVDF)传感器具有车辆通过速度高,安装与维护方便等优越性。本文基于压电薄膜轴传感器的动态称重系统经过合理设计,选择合理配套的放大器及A/D转换器等硬件,同时设计好系统相应的软件平台,动态称重系统可以得到较好的测试结果,试验结果满足工况要求,此方案可以较好的实现对车辆的动态称重。在进行进一步研究及设计改进后,本系统可为今后交通部门整治车辆超载超限实现高速动态称重提供较好的技术手段。
[1]贺曙新.车辆动态称重技术的历史、现状与展望[J].中外公路,2004,24(06):104-108.
[2]周志峰.应变式汽车轴重动态测量系统性能增长研究[D].上海:上海交通大学,2007,11.
[3]张建.高速公路动态称重系统的研究[D].西安:长安大学,2011.
[4]孙秀雅.基于压电薄膜轴传感器的动态称重系统的研发[D].合肥:合肥工业大学,2014,3.
[5]薛岩波.水泥压电传感器信号分析处理系统的研究与开发[D].济南:济南大学,2010,5.
[6]Taek M.Kwon.Development of a Weigh-Pad-Based Portable Weigh-In-Motion System,2012,12.
[7]史航,赵永,张士雄,等.一种压电薄膜轴动态称重系统数据采集方法的介绍[J].科技应用,2006,35(3):29-33.
Dynamic Weighing System based on PVDF
YANG Jun-fu,WEI Jun,QIN Li-geng,ZHANG Meng-jun,XIE Jin-quan,LIU Chong-zhang
(The Collage of the Mechanical Engineering of Guangxi University,Nanning Guangxi 530004,China)
Aiming highway vehicle overloading problem,we designa dynamic weighing PVDF-based vehicle system. The article firstly introduces the dynamic weighing system's hardware system,then compares the three types of piezoelectric sensors'advantages and disadvantages,the installation of PVDF sensor is describedbriefly,the choice of hardware such as charge amplifier and signal collector is presented,and the design flow of the software system is analyzed.Finally,we design an experiment of dynamic weighing system,and we have verified the effectiveness of the system.
dynamic weighing system;piezoelectric sensors;hardware;software;effectiveness
TB21
A
1672-545X(2016)08-0011-06
2016-05-13
广西科技攻关项目(桂科攻1355008-10)
杨俊夫(1992-),男,湖北咸宁人,硕士研究生,研究方向:测试技术与动态称重。
