双足机器人步态规划与运动仿真
2016-10-19刘忠银刘冬冬史天录
刘忠银,刘冬冬,史天录
(五邑大学 机电工程学院,广东 江门 529020)
双足机器人步态规划与运动仿真
刘忠银,刘冬冬,史天录
(五邑大学 机电工程学院,广东 江门 529020)
把双足机器人步行过程划分为5个阶段,通过正逆解方法求得行走过程中的5个关键姿态,并对其进行插值,得到不同步态时各个关节的运动轨迹;利用该方法规划出双足机器人步行的3种步态,通过中间过渡姿态的引入实现了不同步态之间的平稳转换;在Webots仿真平台上实现NAO机器人3种步态行走及不同步态之间的转换,验证方法的可行性.
双足机器人;NAO机器人;步态规划;运动仿真
双足机器人的步态规划一直是机器人领域的研究热点.步态规划是机器人的底层规划任务,是实现机器人稳定行走的基础和实现类人运动的关键,其结果表征为机器人各自由度的运动轨迹,目的是在已经规划的足迹序列基础上实现机器人的最终移动任务[1].对于双足机器人的步态规划主要研究如何提高行走速度和稳定性,降低能量损耗以及不同姿态之间转换等问题.双足机器人主要包括3种基本步态:直步、侧步与旋步.目前,大量的研究工作集中在单一步态规划上[2-4],然而单一步态并不能满足双足机器人在步态规划上的要求.
针对上述步态规划研究中存在的问题,本文主要对双足机器人多种步态以及步态之间的转换进行了研究.首先构建双足机器人的运动学模型;其次通过正逆运动学的同时求解,并根据落地足的足迹位置,求出双足机器人腿部各个关节的角度;再次通过该方法求取行走过程的5个关键姿态;然后使用样条插值算法求得双足机器人的各关节的运动轨迹.为检验该方法的效果,以NAO双足机器人为实验平台进行验证.NAO机器人是法国Aldebaran Robotics公司于2010年推出的一款具备一定程度人工智能与情感智商的双足机器人,同时也是一款教学用机器人.NAO可通过现成的指令块进行可视化编程,允许用户探索各种领域、运用各种复杂程度的编程程序并达到用户想要体验的各种效果.另外NAO还配有一套非常理想的仿真软件Webots,其可以运行在Windows、Mac及Linux上,内建有3D编辑器,方便仿真环境构建及机器人运动规划研究.
1 双足机器人运动学建模与分析
运动学建模与分析是机器人规划和控制的基础,是机器人研究首先需要解决的问题.本节对双足机器人运动学进行建模,通过正逆运动学同时求解的方法得出冗余自由度的处理方案及有效地逆运动学求解方案,为求解双足机器人关键步态提供了行之有效的方法.
1.1双足机器人正运动学
通过对双足机器人的自由度和人的关节自由度分析发现,双足机器人的下肢机构一般都包括3个髋关节(hip pitch,hip roll,hip yaw pitch)、1个膝关节(knee Pitch)、2个踝关节(ankle pitch,ankle roll).髋关节和踝关节各有一个自由度分别负责前向运动和侧向运动,同时髋关节还有一个自由度负责旋步运动;膝关节只有一个自由度负责前向运动.
本文以NAO机器人为对象研究步态规划问题.图1-a为NAO机器人的实体模型,由于上肢结构对步态规划的影响比较小,因此将实体机器人简化为如图1-b所示的结构模型.此外,NAO机器人机构各杆件的参数如表1所示.

图1 NAO机器人模型

表1 NAO机器人机构各杆件的参数
NAO机器人腿部有12个自由度,并且全部为转动关节.采用D-H方法建立NAO机器人的齐次坐标系,如图2所示.
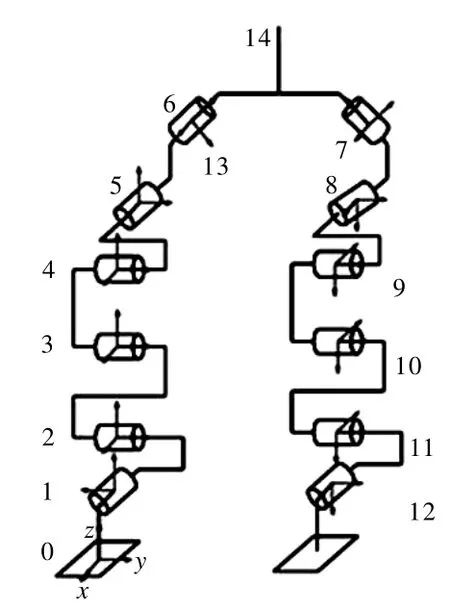
图2 NAO机器人腿部齐次坐标系
其中:sθi=sin θi,cθi=cosθi,cαi-1=cos αi-1,sαi-1=sin αi-1.各参数的含义为:αi-1为从Zi-1到Zi沿Xi-1转动的角度;θi为从Xi-1到Xi沿Zi转动的角度.

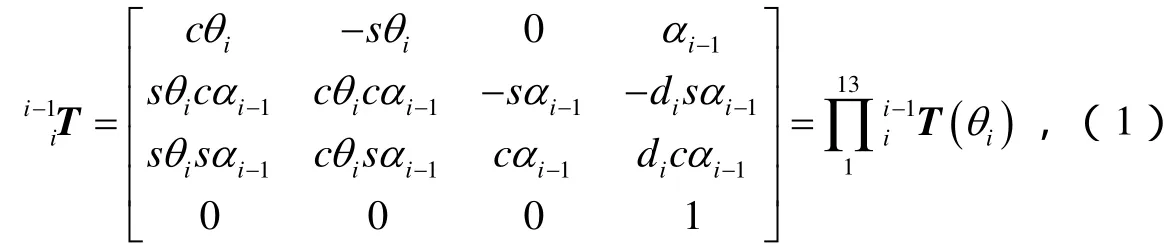
机器人第i个坐标系到参考坐标系的变换矩阵可表示为:通过式(2)便可得到各个坐标系相对于基坐标系的运动学正解.
1.2双足机器人逆运动学

双足机器人的逆运动学解算方法主要分为解析法和数值法.对于复杂运动链,解析方法主要有闭环法、消去法和基于几何关系的方法[5-6].然而,由于双足机器人具有关节的冗余自由度高的特点,在给定落地足的位置和姿态时,理论上有多组关节组合能够满足这一要求.因此为方便双足机器人的逆运动学求解,我们假设:1)双足机器人在行走过程中脚掌与地面平行;2)单腿支撑期,支撑腿的各个关节角度始终保持不变.在该假设的基础上,本文采用基于几何关系的解析法实现逆运动学解算,通过正运动学与逆运动学相结合的方法可快速求解出各个关节的角度值.图3为落地足与支撑足相对位置示意图,求解过程遵循先求θ,再求d1与d2的原则.
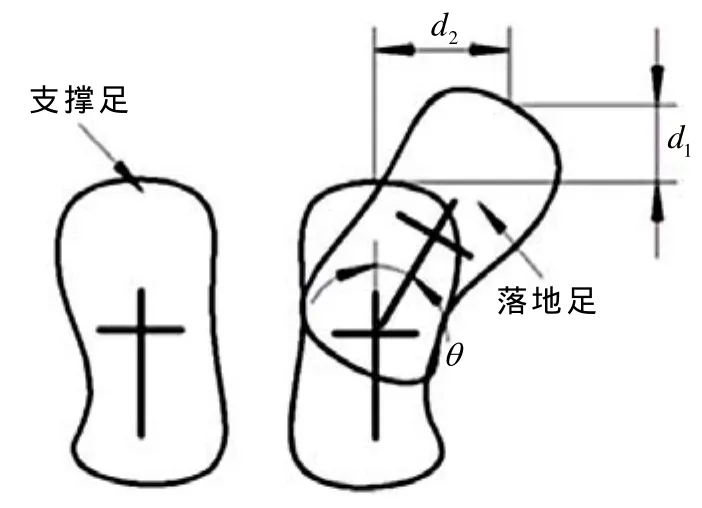
图3 落地足与支撑足相对位置示意图
1.3双足机器人关键姿态求解
考虑到双足机器人左右腿的对称性,仅以左腿为例阐述解算过程.单腿支撑期,右腿为支撑腿时各个关节的角度值应满足落地足能顺利完成直步、侧步及旋步的动作.
在已知右腿关节角度的情况下,为顺利求解出左腿各关节的角度,我们在髋关节及踝关节处建立两个假想的平面.假想平面1与髋关节7坐标系y-z面重合,假想平面2与踝关节11坐标系x-z面重合.假设已知落地足位置为(θ′,d1′,d2′),求解左腿各关节的角度过程如下:
1)令θ6=θ7=θ′,由正运动学求得左髋关节相对于基坐标系的坐标值即A的坐标值;
2)由落地足脚掌的位置求得左踝关节相对于基坐标系的坐标值即C的坐标值;
3)AD为AC在假想平面1的投影,由几何知识计算∠1(AE与AD的夹角),∠2(AC与AD的夹角),∠3(AC与AB的夹角),∠4(AB与BC的夹角),θ9=∠2+∠3,θ10=180-∠4(图4);
4)FH为FG在假想平面2上的投影,则由几何知识求得∠5,∠6,θ11=∠5,θ12=∠6(图5);
5)根据求得的角度,由正运动学计算脚掌此刻的位置(θN,d1,d2),如果求得的θN≠θ则令θ6=θ7=(θN-θ′)+θ′,跳回1)重新计算直至
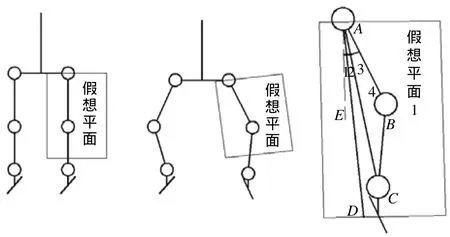
图4 髋关节及膝关节角度求解过程示意图
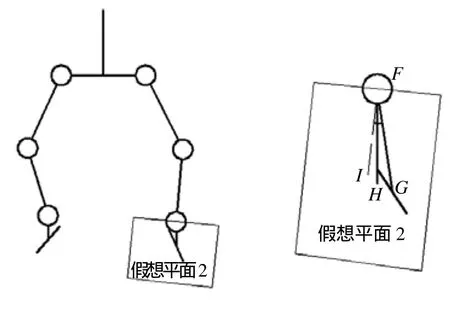
图5 踝关节角度求解过程示意图
2 双足机器人步态规划
双足机器人在行走过程中,无论直步、侧步还是旋步,行走过程都包括单腿支撑期及双腿支撑期.因此本文分别规划出单腿支撑期和双腿支撑期的步态,把若干个单腿-双腿支撑期循环来输出完整的步态.为实现不同步态之间的转换,我们引入中间过渡姿态,即每一步都是由一个中间过渡姿态到达另一个中间过渡姿态.
单腿支撑期步态规划算法是先确定如图6所示的5个关键姿态,然后通过3次样条插值的方法形成连续的转动序列.5个关键姿态的求解由上文提到的正逆运动学方法求得.
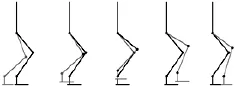
图6 单腿支撑期内的关键姿态示意图
双腿支撑期步态规划算法不能直接使用3次样条插值,因为插值产生轨迹的过程只保证了轨迹经过插值点,不能确定在插值过程中的中点轨迹,因此通过“位置—速度—加速度”进行约束修正[7].
3 仿真实验
为确保双足机器人实现不同步态之间的稳定转换,在5个关键姿态中设置一个中间过渡转换姿态,如图6中的第3个姿态,任何一种步态都是机器人由中间过渡姿态到另一个中间过渡姿态转换的过程.中间过渡姿态时机器人各个关节的角度值如表2所示,该值为经验值,并由零力矩理论验证其稳定性.通过中间过渡姿态的引入,成功实现了双足机器人不同步态之间的过渡.

表2 单腿支撑期的关节角度值
为验证上述规划方法的可行性及有效性,在Webots平台下实现了如图7所示的NAO机器人直步、侧步及旋步等一系列步态的控制.图7中1~2为NAO机器人由站立姿态转换为中间过渡姿态过程;2~4为NAO机器人以左腿为支撑腿向前直步6 cm的运动过程;4~6为NAO机器人以右腿为之支撑腿向前直步6 cm的运动过程;6~8为NAO机器人以左腿为支撑腿向右侧步4 cm的运动过程;8~10为NAO机器人以右腿为支撑腿向左侧步4 cm的运动过程;10~12为NAO机器人以左腿为支撑腿做向前4 cm,向右2 cm右旋20°的运动过程;12~14为NAO机器人以右腿为支撑腿做向前4 cm,向左2 cm左旋20°的运动过程;14~15为NAO机器人由中间过渡姿态过程转换为站立姿态.

图7 NAO机器人仿真实验步态图
4 结论
传统步态规划主要集中在直步步态的规划上,并不能满足机器人实际环境中的运动要求.通过正逆运动求解的方法求得机器人不同步态时的5个关键姿态,并通过3次样条插值的方法得到了机器人不同步态时各关节的运动轨迹,并在Webots仿真平台下验证了该方法的有效性.然而该方法实现的机器人的步行是离线规划下的静态步行,其稳定性及适应性相对较差,因此下一步将在该方法的基础上实现机器人行走过程中的稳定性及适应性.
[1] 夏泽洋,陈恳.仿人机器人足迹规划建模及算法实现[J].机器人,2008,30(3): 231-237.
[2] 董金波.双足机器人步态规划与运动学仿真研究[J].智能工程,2011(7): 66-69.
[3] 王孝义,秦建恒,邱晗,等.基于ZMP的类双足步行机构行走稳定性控制[J].机械科学与技术,2014,33(6): 802-806.
[4] 薛方正,陈强,厚之成.基于CPG的双足机器人多层步行控制器设计[J].控制与决策,2015,30(3): 467-472.
[5] 王剑.仿人机器人在线运动规划方法研究[D].长沙:国防科技大学,2008.
[6] MOOSAVIAN S A A,RASTEGARI R,PAPADOPOULO E.Multiple impedance control for space free-flying robots [J].Journal of Guidance,Control and Dynamics,2005,28(5): 939-947.
[7] 徐凯.仿人机器人步态规划算法及其实现研究[D].北京:清华大学,2004.
[责任编辑:韦 韬]
Gait Planning and Movement Simulation of Biped Robots
LIU Zhong-yin,LIU Dong-dong,SHI Tian-lu
(School of Mechanical and Electrical Engineering,Wuyi University,Jiangmen 529020,China)
Biped robots’ walking is divided into 5 stages and 5 key postures are derived by the positive inverse solution method.Interpolation of the walking process yields the motion trajectory of each joint.3 kinds of gait are obtained by using the method,and the introduction of middle transition postures between the 3 kinds of gait achieves the smooth conversion between different kinds of gait.The 3-posture walking of the NAO robot and the successful conversion between different gaits on the Webots simulation platform demonstrates the feasibility of the method.
biped robots; NAO robots; gait planning; movement simulation
TP242.6
A
1006-7302(2016)01-0029-05
2015-09-06
刘忠银(1990—),男,山东聊城人,在读硕士生,主要从事机器人步态研究工作;史天录,副教授,博士,硕士生导师,通信作者,主要从事机电系统可靠性研究.
