基于相位补偿和等效运动的太赫兹SAR运动目标成像方法
2016-10-18吴称光秦玉亮王宏强
张 野, 吴称光, 邓 彬, 秦玉亮, 王宏强
(国防科学技术大学电子科学与工程学院, 湖南 长沙 410073)
基于相位补偿和等效运动的太赫兹SAR运动目标成像方法
张野, 吴称光, 邓彬, 秦玉亮, 王宏强
(国防科学技术大学电子科学与工程学院, 湖南 长沙 410073)
太赫兹合成孔径雷达(synthetic aperture radar,SAR)带宽大,能够对运动目标高分辨成像,但目标运动导致成像移位和模糊。针对不同的运动形式,分别提出基于相位补偿和等效运动的运动目标成像方法。首先分析不同运动参数对成像的影响,然后通过补偿相位和等效载机速度获得运动目标聚焦、背景模糊的图像。通过恒虚警率(constant false alarm rate,CFAR)检测和逆成像处理获得目标和背景分别聚焦的图像。最后对两幅图像进行叠加,实现了在静止背景上对运动目标的准确成像。不同信噪比条件下的电磁计算数据仿真结果验证了所提方法的有效性。
太赫兹; 等效运动; 相位补偿; 成像
0 引 言
近年来,随着太赫兹源[1-3]和器件的不断发展,太赫兹波在成像领域的应用逐渐成为一个新的研究热点。在合成孔径雷达成像应用中,太赫兹波频率高、带宽大、距离向分辨率高,同时太赫兹雷达可以实现极窄天线波束,提高方位向的分辨能力。因此,太赫兹SAR可以实现对目标更加精细的成像。2012年5月,美国国防部先进研究项目局(defense advanced research projects agency, DARPA)发布了“视频合成孔径雷达(vedio synthetic aperture radar, ViSAR)”的研究项目,目标是研发一种工作在太赫兹低频段的高分辨率视频合成孔径雷达,可装置在各种航空平台上穿透云层对地面进行成像并检测运动目标,促进了太赫兹系统实用化的研究。目前常用的SAR成像系统大多工作在微波频段,其体积和功耗较大。太赫兹SAR成像系统[4-6]天线孔径小,便于机载集成,同时在保证同等成像分辨率的条件下,雷达成像帧频与雷达工作频率成正比,因此太赫兹SAR成像系统更适合应用于动目标的快速实时成像。
在对运动目标进行SAR成像时,目标的运动会给雷达回波带来附加的相位,太赫兹频段雷达对目标的运动更加敏感,成像结果移位和模糊的现象更加严重。传统的SAR成像算法无法消除运动带来的影响,需要采用新的成像算法对运动目标的回波数据进行处理。2009年,文献[7-10]采取在运动目标成像区域设置固定步长搜索相对速度的方法实现了运动目标方位向的检测和聚焦,但成像背景变的模糊不清。目前,还罕有在静止背景上对运动目标的位置实时成像的研究。
本文提出了分别基于相位补偿和等效运动[11-12]的两种运动目标成像算法,对静止背景上移位和模糊的运动目标进行恢复成像,采用双参数恒虚警率(constant false alarm rate,CFAR)检测算法[13-14]实现模糊背景中目标的检测,与去除目标后聚焦成像的静止背景叠加,最终实现了在静止背景上对运动目标的清晰成像。
1 目标运动建模与影响分析
机载情况下雷达与目标的几何关系如图1所示。
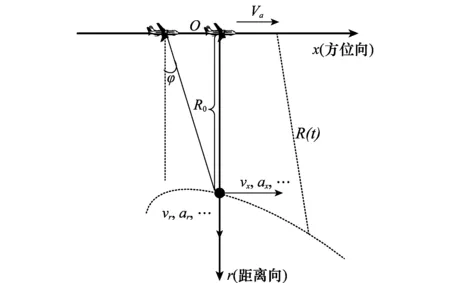
图1 运动目标SAR几何关系示意图Fig.1 Geometric relationship diagram of moving target and SAR

本文只考虑速度和加速度的影响,当N=2时,即匀加速运动的情况下,由于R0≫vr,由泰勒展开可得目标斜距与时间t的关系为
(1)
为便于分析且不失一般性,仅对SAR方位回波和方位图像进行分析。目标方位向回波(多普勒历程)为
(2)
式中,Tl为脉冲持续时间,对常规的静止目标方位聚焦时采用的参考信号为
(3)
若目标静止,则参考信号完全匹配目标信号,目标在SAR图像上聚焦。相反,目标的运动会导致各阶相位误差的存在,在匹配滤波后会由于参考信号的失配会造成SAR图像错位、模糊及其他不利的影响[15-16],如表1所示。由表1可知,由于太赫兹频率高,因此在其他参数相同的条件下,运动目标成像的移位和散焦的现象更加严重。
2 运动目标恢复成像算法
本文提出了基于相位补偿和等效运动的两种运动目标成像方法。相位补偿法适用于目标存在二维速度和加速度的情况,成像过程中数据量较大;等效运动法适用于目标仅存在二维常速度的情况,具有不引入新数据,成像速度快的特点。
在太赫兹频段,运动目标的多普勒效应更加敏感,更利于运动目标的检测与识别。现阶段对太赫兹SAR系统下运动目标参数估计[17-18]的方法有很多,文献[19]采用简单的双通道或三通道相位中心偏置天线技术(displacedphasecenterantenna,DPCA)与沿航迹干涉技术(along-trackinterferometric,ATI)相结合的方法实现了地面动目标检测和运动目标参数估计。本文的仿真是建立在参数估计结果的基础上进行的,成像算法流程如图2所示。
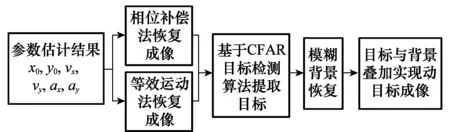
图2 动目标成像算法流程图Fig.2 Flow chart of moving target imaging algorithm
2.1基于相位补偿的恢复算法
在图1模型条件下,由于运动的影响,雷达目标距离公式可以表示为
(4)
式中,R0(t)为目标静止的斜距;φ为对应t时刻的雷达观测角。
SAR时域回波为
(5)
式中,Pr(·)和Pa(·)分别为雷达线性调频信号的窗函数和方位窗函数。
对回波进行相位补偿
(6)
其中,k=4π/λ,对补偿后的回波数据进行成像即可得到位置正确并且聚焦的目标图像,由于相位补偿是对背景和运动目标的整体回波进行补偿,成像的结果中背景由于回波附加了相位信息发生位置的偏移和散焦,导致背景的成像结果模糊不清。
为了实现在静止背景上得到运动目标的成像结果,首先需要从模糊背景中提取出目标,即SAR图像中的检测问题。双参数CFAR算法常用于SAR图像的目标检测,可以在抑制背景的条件下检测出场景中的目标。在获得目标的检测结果后,将目标从模糊背景中去除,得到不含目标的模糊背景,其生成的回波信号记为sr2(τ,t),按照式(6)对sr2(τ,t)作相位的逆补偿:
(7)
对sr3(τ,t)成像即可得到恢复后的原始背景,将目标检测的结果与恢复后的背景叠加即可实现运动目标在静止背景上的准确成像。
2.2基于等效运动的恢复算法
等效运动法的前提是雷达平台和目标的运动都为线性运动并且只具有恒定的常速度(不考虑加速度存在的情况)。
图3展示了两个包含一个运动目标和一个运动平台的场景。图3(b)的几何关系是由图3(a)通过以下两步变换得到的。
(1) 令地面目标静止,将目标的速度叠加到运动平台上,这一步将运动目标转换成了静止目标。
(2) 将整个场景旋转角度θ,使等效后的运动平台的速度方向依旧为x轴正方向。
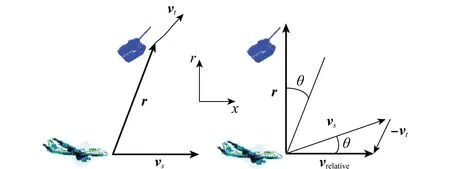
图3 等效运动法示意图Fig.3 Schematic diagram of equivalent movement method
在这两种场景下,雷达到目标的距离与时间的函数是完全相同的。对图3(a)中运动目标的成像,可以简化为在图3(b)中,雷达照射波束偏移角度θ,平台运动速度替换为vrelative的对静止目标的成像。因此,任意常速度运动目标的成像可以通过两步参数的变换转化为常规的静止目标成像区域的旋转和速度矢量的叠加。vrelative,θ与vr,vx的关系为
(8)
(9)
对参数变换后的场景进行成像即可得到位置正确并且聚焦的目标图像, 此时,成像结果中背景由于附加了等效运动会发生移位和模糊。目标的检测方法与第2.1节中相同,将去除目标的模糊背景做上述两步的逆变换得到静止背景,目标与背景叠加即可实现运动目标在静止背景上的准确成像。
3 仿真结果分析
雷达工作中心频率为220GHz,带宽为10GHz,观测角范围为0.048rad,斜距R0=3 000m,平台运动速度Va=80m/s,距离向分辨率为1.5cm,方位向分辨率为1.42cm。目标数据为长48cm,宽20cm的坦克缩比模型的复RCS数据,背景为微波频段的Isleta湖的成像结果,如图4所示。雷达接收的回波信号是通过提取像素和快速回波生成合成的太赫兹-SAR背景回波[20]和分布式目标太赫兹-SAR回波[21]两部分组成的。

图4 成像背景Fig.4 Imaging background
3.1相位补偿法成像结果
在不存在噪声的条件下,图5为vr,vx,ar,ax均为0时,坐标(0,0)处静止坦克目标成像结果;图6为vr,vx为10m/s,ar,ax为1m/s2时,运动坦克目标成像结果;图7为补偿参数vr,vx=10m/s,ar,ax=1m/s2时,对整体回波按照式(6)进行相位补偿后的运动坦克目标成像结果。
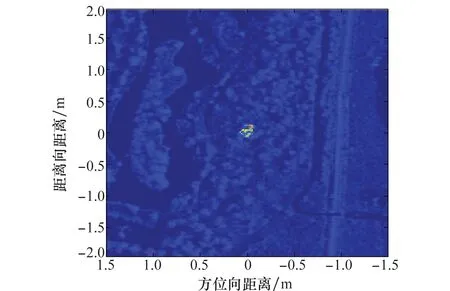
图5 静止目标成像结果Fig.5 Imaging result of static target
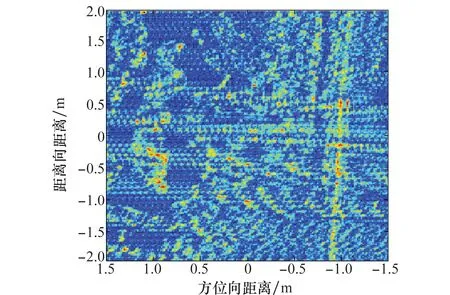
图6 运动目标成像结果Fig.6 Imaging result of moving target
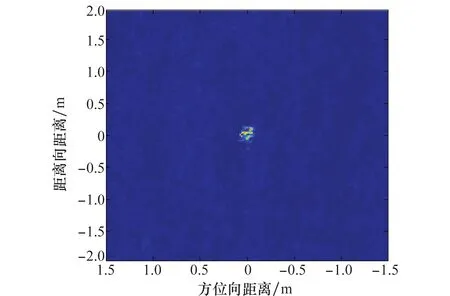
图7 相位补偿后成像结果Fig.7 Imaging result after phase compensation
对比图5~图7可以发现,相位补偿后的运动目标在正确的位置上实现了聚焦成像,此时背景回波由于附加了运动相位导致背景成像模糊不清。采用双参数CFAR算法对相位补偿后的成像结果进行目标检测,图8为在虚警概率为10-6的条件下,对图7成像结果的目标检测结果及相干处理后的成像结果。
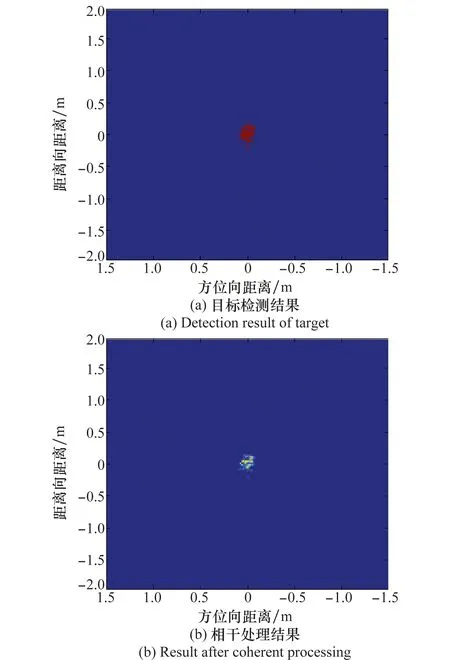
图8 双参数CFAR算法检测结果Fig.8 Detection result by double parameter CFAR algorithm
在图7中去除图8(b)的检测结果,剩余的模糊背景如图9所示,对其生成的回波信号按照式(7)作相位的逆补偿后的成像结果如图10所示。与图11的原始背景的成像结果相比,可以发现在标注区域,恢复后的背景存在一定的模糊现象,这是由于目标的去除导致目标所在位置小部分图像的缺失造成的。将图8(b)的目标检测结果叠加到图10的恢复后的背景上,最终的成像结果如图12所示,实现了运动坦克目标在静止背景上的准确成像。
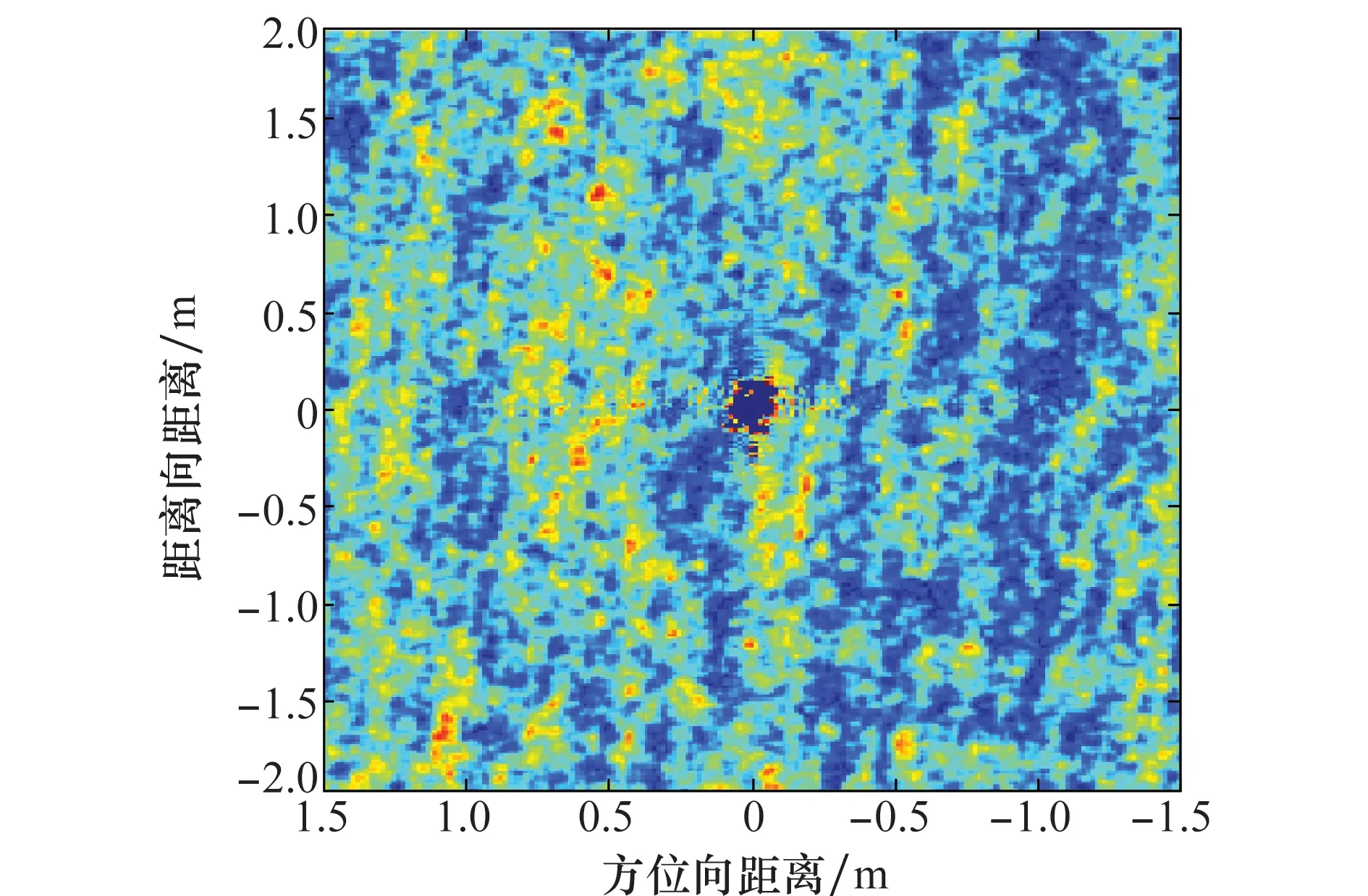
图9 去除目标的模糊背景成像结果Fig.9 Imaging result of fuzzy background after removing target
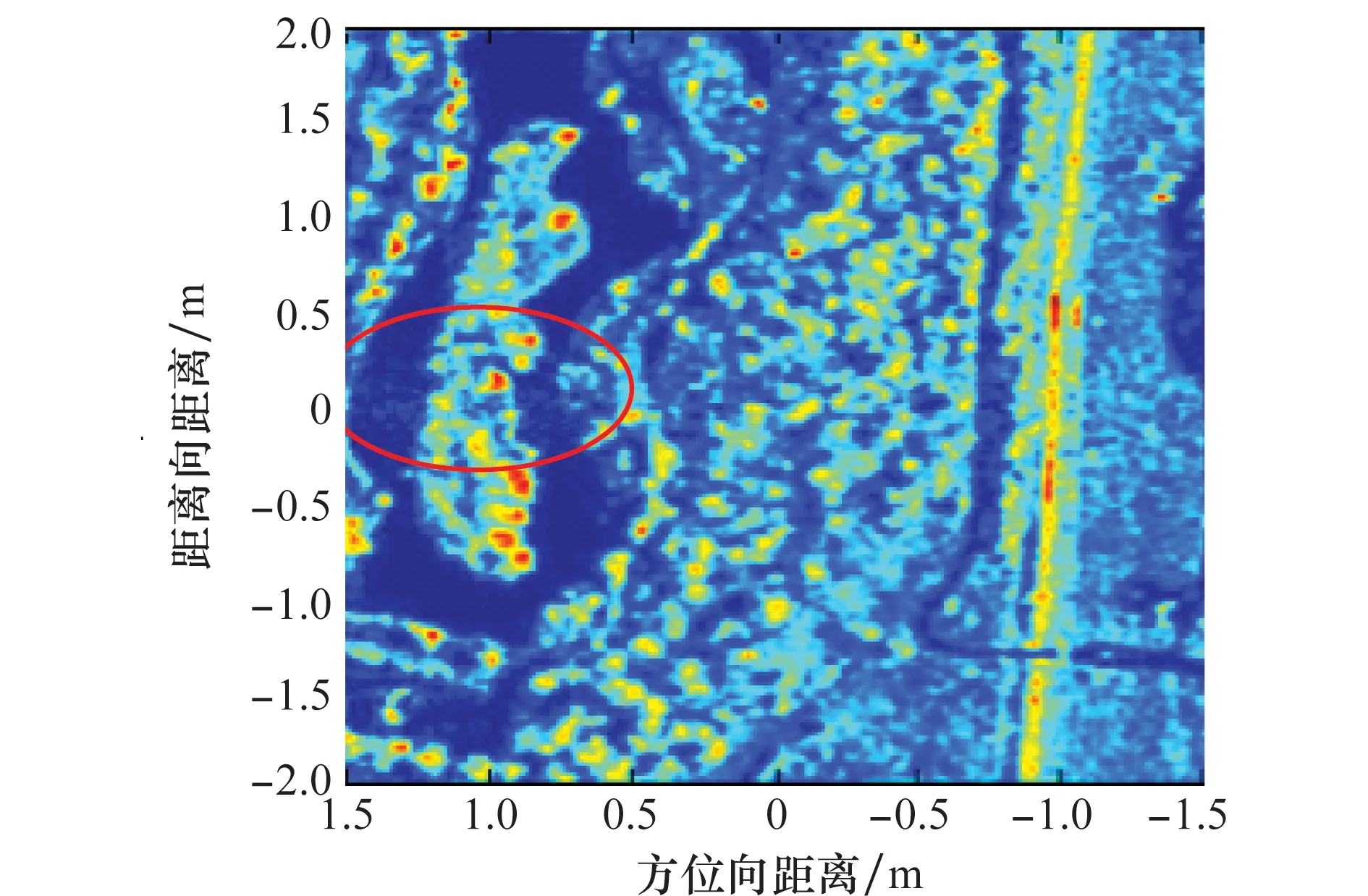
图10 模糊背景恢复后成像结果Fig.10 Recovered imaging result of fuzzy background
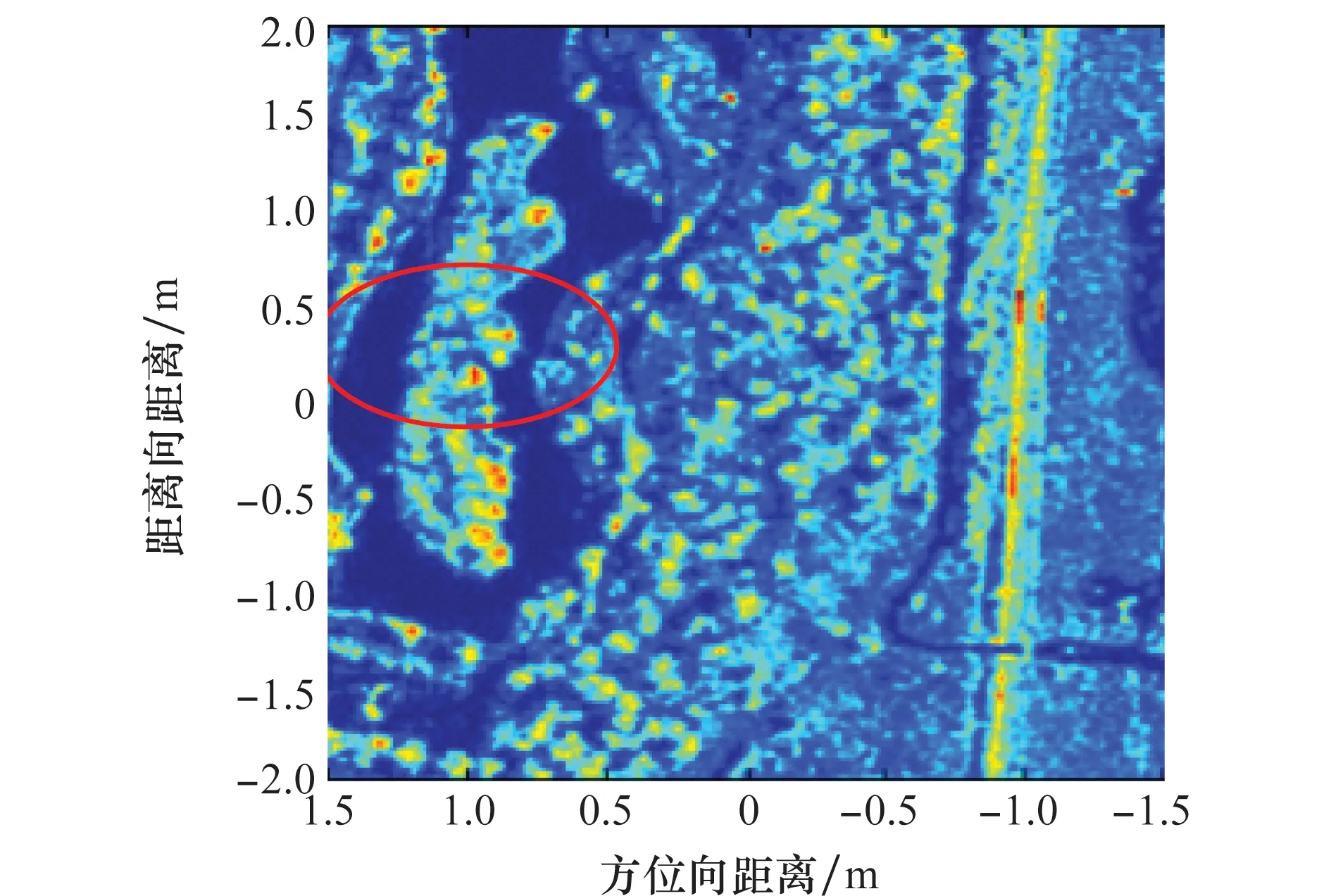
图11 原始背景Fig.11 Original background
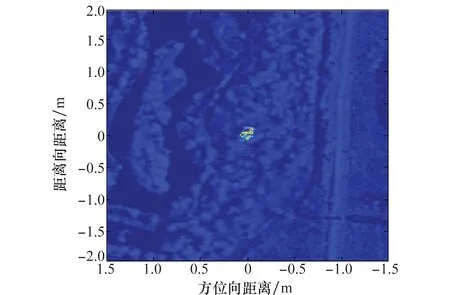
图12 最终成像结果Fig.12 Final imaging result
以上成像结果是在信噪比(signal-to-noiseratio,SNR)为无穷大的条件下得出的,下面分别取SNR为10dB、0dB、-10dB,采用本小节的成像方法,模糊背景的恢复结果和最终成像结果如图13和图14所示。
对比图13和图14中不同SNR条件下的两组成像结果可以发现,在SNR为10dB时,模糊背景的恢复结果和最终的成像结果聚焦良好,受噪声的影响不大;当SNR为0dB时,由于大气和地表的噪声和杂波的影响,模糊背景的恢复结果存在一定的恶化,最终的坦克成像结果炮管部分已经被噪声淹没,但此时仍能识别出背景和目标;当SNR为-10dB时,此时已无法得到恢复后的背景图像。由以上分析可知,本文所提方法在SNR为0dB以上时成像效果良好,可以实现运动目标在静止背景上的成像,具备一定的实用性。
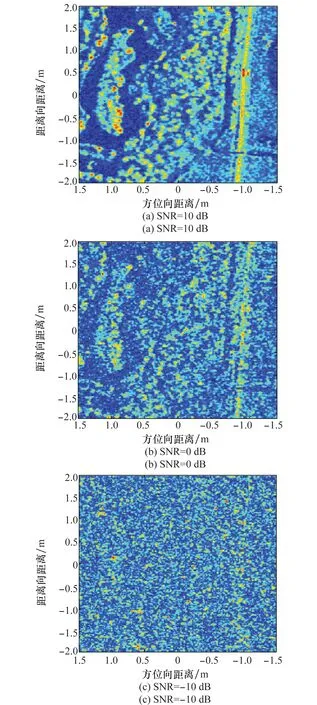
图13 不同信噪比下模糊背景恢复成像结果Fig.13 Recovered imaging result of fuzzy background under different SNR
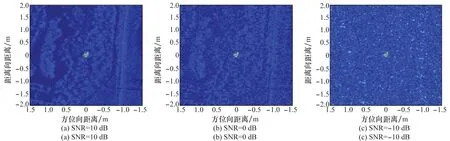
图14 不同信噪比下最终成像结果Fig.14 Final imaging result under different SNR
3.2等效运动法成像结果
等效运动法应用的前提是目标只有二维的常速度,不存在加速度。当坦克的运动速度vr,vx均为10m/s,运动坦克目标成像的结果如图15所示, 采取等效运动法,计算可得vrelative=90.553 9m/s,θ=0.110 7rad,通过第2.2节中的两步变换,成像结果如图16所示,可以发现运动坦克重新实现了聚焦,背景由于附加了等效运动,会产生移位和模糊。
目标提取和最终在静止背景上实现对运动目标成像的方法和流程与相位补偿法相同,不再进行说明。
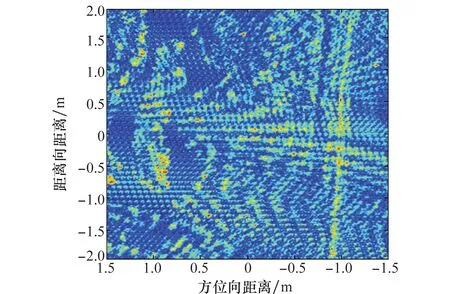
图15 vx=vy=10 m/s运动坦克成像结果Fig.15 Imaging result of moving tank with velocity vx=vy=10 m/s
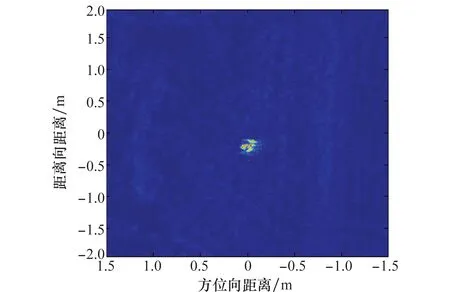
图16 等效运动法成像结果Fig.16 Imaging result by equivalent movement method
4 结 论
本文针对太赫兹-SAR运动目标成像结果背景清晰,目标发生移位和模糊的现象,在得到目标运动参数的基础上,提出了相位补偿法和等效运动法两种聚焦恢复算法,分别在目标具有速度、加速度和只具有速度信息的条件下,将运动目标聚焦恢复到正确位置。采用双参数CFAR算法从模糊背景中提取出目标,对模糊背景生成回波进行原算法的逆补偿,将恢复的背景与目标叠加,在SNR大于0dB时可以实现在静止背景上对运动目标的准确成像。本文为未来ViSAR的实现和战场侦查打击一体化提供了算法支持,具有一定的实用价值。
[1]WangL,WangF.ATHzsourcebyup-convertingradiofrequencywithplasmawaveguide[J].Applied Physics Letters, 2014, 105(18):183502-1-183502-4.
[2]NasseMJ,SchuhM,NaknaimueangS,etal.FLUTE:aversatilelinac-basedTHzsource[J].Review of Scientific Instruments, 2013, 84(2):022705-1-022705-4.
[3]ShiW,DingYJ.Fingerprintingmoleculesbasedondirectmeasurementofabsorptionspectrumbyfrequency-tuningmonochromaticTHzsource[J].Laser Physics Letters, 2004, 1(11):560-564.
[4]FengQ,MinamideH,SchreursD,etal.Influenceofantenna’sdirectivityinindoormmW/THzSARimagingsystems:asystemlevelsimulation-basedstudy[C]∥Proc.of the International Conference on Infrared, Millimeter & Terahertz Waves, 2011:1-2.
[5]HeremansR,VandewalM,AcheroyM.SyntheticapertureimagingextendedtowardsnovelTHzsensors[C]∥Proc.of the IEEE Sensors, 2008:438-441.
[6]JaeschkeT,BredendiekC,PohlN. 3DFMCWSARimagingbasedona240GHzSiGetransceiverchipwithIntegratedAntennas[C]∥Proc.of the Microwave Conference, 2014:1-4.
[7]VuVT,PetterssonMI,ZepernickHJ,etal.ExperimentalresultsonmovingtargetdetectionbyfocusinginUWBlowfrequencySAR[C]∥Proc.of the IET International Conference on Radar Systems, 2007:1-5.
[8]VuVT,SjogrenTK,PetterssonMI.MovingtargetdetectionbyforcusingforfrequencydomainalgorithmsinUWBlowfrequencySAR[C]∥Proc.of the Geoscience and Remote Sensing Symposium, 2008: 161-164.
[9]SjogrenTK,VuVT,PetterssonMI,etal.SpeedestimationexperimentsforgroundmovingtargetsinUWBSAR[C]∥Proc.of the IET International Conference on Radar Systems, 2007:1-5.
[10]SjogrenTK,VuVT,PetterssonMI.MovingtargetrelativespeedestimationinthepresenceofstrongstationarysurroundingusingasingleantennaUWBSARsystem[C]∥Proc.of the IEEE International Geoscience and Remote Sensing Symposium, 2008:157-160.
[11]YangH,SoumekhM.Blind-velocitySAR/ISARimagingofamovingtargetinastationarybackground[J].IEEE Trans.on Image Processing, 1993, 2(1):80-95.
[12]MinardiMJ,GorhamLA,ZelnioEG.GroundmovingtargetdetectionandtrackingbasedongeneralizedSARprocessingandchangedetection[C]∥Proc.of the Defense and Security International Society for Optics and Photonics, 2005:156-165.
[13]AnW,XieC,YuanX.AnimprovediterativecensoringschemeforCFARshipdetectionwithSARimagery[J].IEEE Trans.on Geoscience & Remote Sensing, 2014, 52(8):4585-4595.
[14]LinX,HongJ,SunX,etal.NewCFARshipdetectionalgorithmbasedonadaptivebackgroundcluttermodelinwideswathSARimages[J].Remote Sensing Technology & Application, 2014, 29(1):75-81.
[15]LiuYY.StudyonmovingtargetsSARimagingtechnology[D].Chengdu:UniversityofElectronicScienceandTechnologyofChina,2014.(刘洋洋.运动目标SAR成像技术研究[D].成都:电子科技大学,2014.)
[16]LuY,MaH.Shiptargetmovementparameterestimationbasedonthreelineararrayhigh-resolutionremotesensingimage[C]∥Proc.of the 2nd International Conference on Electrical, Computer Engineering and Electronics, 2015:418-422.
[17]WangH,ZhangY,WangB.Anovelhelicopter-borneterahertzSARimagingalgorithmbasedonkeystonetransform[C]∥Proc.of the IEEE International Conference on Signal Processing, 2014:1058-1062.
[18]LiLS,LiS,YinHC.TerahertzISARimaginginnoisebackground[C]∥Proc.of the SPIE-International Society for Optics and Photonics, 2013:89090V-1-89090V-4.
[19]BaumgartnerSV,KriegerG.Acceleration-independentalong-trackvelocityestimationofmovingtargets[C]∥Proc.of the IET Radar, Sonar and Navigation, 2010, 4(3):474-487.
[20]DengB.Researchonsyntheticapertureradarmicro-motiontargetindication[D].Changsha:NationalUniversityofDefenseTechnology, 2011. (邓彬.合成孔径雷达微动目标指示(SAR/MMTI)研究[D].长沙:国防科学技术大学, 2011.)
[21]LinC.ResearchontechnologiesofmovingtargetsimagingindistributedSAR[D].Harbin:HarbinInstituteofTechnology, 2011. (林超.分布式SAR动目标成像技术研究[D]. 哈尔滨:哈尔滨工业大学, 2011.)
Terahertz SAR moving target imaging method based on the phase compensation and equivalent movement
ZHANG Ye, WU Cheng-guang, DENG Bin, QIN Yu-liang, WANG Hong-qiang
(College of Electronic Science and Engineering, National University of Defense Technology, Changsha 410073, China)
Terahertz synthetic aperture radar (SAR) has large bandwidth and is able to acquire high resolution images of moving targets. However, the target motion leads to the position offset and obscure in imaging. Aiming to different forms of motion, the moving targets imaging method based on the phase compensation and equivalent movement is put forward. Firstly, the influence of different motion parameters on imaging is analyzed. And then the image with focused moving targets and blurred background is obtained by employing the phase compensation and equivalent load machine speed. Secondly, the images of target and background focused respectively are acquired by constant false alarm rate (CFAR) detection and inverse imaging processing. Finally, it realizes the accurate imaging of moving targets in the static background by adding the two aforementioned images together. Electromagnetic calculation data simulation results under different signal-to-noise ratio (SNR) show the effectiveness of the proposed method.
terahertz; equivalent movement; phase compensation; imaging
2015-10-24;
2016-06-21;网络优先出版日期:2016-07-18。
国家高技术研究发展计划(863计划)(2014AA8125021E);国家自然科学基金(61302148,61571011)资助课题
TN 957.51
A
10.3969/j.issn.1001-506X.2016.10.11
张野(1992-),男,硕士研究生,主要研究方向为太赫兹雷达成像技术。
E-mail:1078670871@qq.com
吴称光(1985-),男,博士研究生,主要研究方向为太赫兹合成孔径雷达成像。
E-mail:wcg3057391@163.com
邓彬(1981-),男,讲师,博士,主要研究方向为合成孔径雷达、太赫兹雷达成像。
E-mail:dengbin@nudt.edu.cn
秦玉亮(1980-),男,副研究员,博士,主要研究方向为雷达信号处理、目标识别、量子雷达。
E-mail:yuliangqin@mail.com
王宏强(1970-),男,研究员,博士,主要研究方向为太赫兹技术、目标识别、雷达信号处理。
E-mail:oliverwhq@vip.tom
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160718.1041.010.html