基于波导不变量的单水平阵被动测距技术
2016-10-18宋雪晶赵安邦毕雪洁
宋雪晶, 赵安邦, 马 骏, 毕雪洁
(1. 哈尔滨工程大学水声技术重点实验室, 黑龙江 哈尔滨 150001;2. 哈尔滨工程大学水声工程学院, 黑龙江 哈尔滨 150001)
基于波导不变量的单水平阵被动测距技术
宋雪晶1,2, 赵安邦1,2, 马骏1,2, 毕雪洁1,2
(1. 哈尔滨工程大学水声技术重点实验室, 黑龙江 哈尔滨 150001;2. 哈尔滨工程大学水声工程学院, 黑龙江 哈尔滨 150001)
浅海低频声场具有稳定的干涉特性,水听器接收信号声强图中的干涉条纹包含了目标的运动和距离信息。在推导水平直线阵波束域信号声强表达式的基础上,提出一种可用于单水平直线阵的运动目标被动测距技术。该技术利用波导不变量理论并结合水平阵转向前后的波束域声强信息实现目标的被动测距。在使用Hough变换进行运动参数的估计之前,采用对比度拉伸变换和中值滤波的图像预处理方法,以提高低信噪比条件下参数估计的准确性和稳健性。理论分析和仿真研究结果表明,所提算法能够有效地对运动目标进行被动测距,对目标是否通过最近距离点没有限制,具有更广泛的适用性。
波导不变量; 声场干涉现象; 水平直线阵; 被动测距
0 引 言
浅海波导中宽带连续谱声源的声强图中呈现出稳定的距离-频率干涉条纹。文献[1]最早用一个常量参数描述了声源距离、频率和干涉条纹斜率的关系,并将其定义为波导不变量。近年来,波导不变量理论被广泛应用在时间反转镜[2-3]、阵列信号处理[4-5]、地声反演[6-8]、主动声呐探测[9-11]等众多水声领域的研究内容中。而关于波导不变量基本理论及其应用也取得了很多重要的研究进展。文献[12]推导了低频分析与记录(low-frequency analysis and recording,LOFAR)谱图的二维傅里叶变换的脊公式,并利用其计算波导不变量。文献[13]提出了一种用模态WKB(Wentzel-Kramers-Brillouin)近似理论计算波导不变量的方法,直接揭示了声速分布与波导不变量的关系。文献[14]研究表明,对于甚低频声场,波导不变量与模态阶数有关,提出了一种计算每两阶模态对应的波导不变量的方法。文献[15]研究了水平直线阵波束输出的声强表示,声源方位对应的波束输出与单水听器声强具有相似斜率的条纹结构,并且能够分辨不同方位的目标,具有更好的抗噪声效果。
由于波导不变量能够直接将声源距离与条纹斜率联系起来,因而波导不变量理论在声源的被动测距上有着大量应用。文献[16]用实验数据结果表明了水平直线阵干涉谱在对远距离、不同方位的多个声源实现被动测距的能力,并验证了Hough变换在估计目标运动参数上的有效性。文献[17]研究了一种相对于接收阵列作径向运动的宽带声源的测距方法,推导了用于距离估计所需的最小声源带宽和最小阵列孔径,利用信号处理参数和海洋环境参数的关系有效地减小了噪声的影响。文献[18]利用单水听器在两个不同时刻接收到的信号差的平方所呈现出的类干涉特性,实现对单频声源或宽带声源的速度和距离估计。文献[19]提出了一种用双水听器接收信号对声源进行测速、测距的方法。在波导不变量已知情况下,文献[20]通过对水平阵不同阵元的接收信号声强谱进行频移补偿来估计声源距离。文献[21]利用矢量信号声强干涉谱对目标最近通过距离和波导不变量进行估计。文献[22]从射线理论角度讨论了波导干涉现象中所隐含的声源距离信息,分析了浅海和深海中的干涉现象在目标被动测距上的潜在应用价值。然而这些公开文献中,所用的测距方法通常需要已知海洋环境参数或需要满足目标通过最近距离点的前提条件。
本文基于波导不变量理论,无需已知海洋先验知识,利用单水平直线接收阵列在运动过程中机动(转向)前后的阵列接收信号波束域信息,研究了一种宽带运动声源的被动测距方法。该方法无需声源通过最近通过距离,具有更广泛的适用性和实际应用价值。
1 波导不变量基本原理
当接收水听器与声源之间的距离大于几倍海深时,若声源深度为zs,频率为ω,则深度zr、距离r处接收到的单个无指向性点源辐射的声场可以表示为如式(1)所示的有限阶模态和的形式。
(1)

则对应的声强可以表示为
(2)
式中,Δξmn=ξm-ξn为不同阶模态水平波数的差,式(2)等号右边由两项构成,第2项为r-f平面声强图中呈现干涉条纹的主要原因。
下面推导水平直线阵波束域信号的声强表达式。若接收阵为N元水平直线阵,阵元间距为d,目标方位为θs,声源与接收阵第1个阵元距离为r1,则声源与第n个阵元的距离为
(3)
第n个阵元处声压为
(4)
对于常规波束形成,其波束输出为
(5)
将式(4)代入到式(5)中并整理可得
(6)
方位对准声源方位时,θ=θs,声源方位的波束输出
(7)
式(7)表明,对应声源方位的波束输出与单水听器声强有相似的表达式,因而具有相同斜率的干涉条纹,其条纹轨迹满足
(8)
式(8)同时给出了波导不变量β的定义。从式(8)可以看出,波导不变量能够直接描述出声强图中干涉条纹斜率与声源距离和频率的关系。
图1为32元水平直线阵接收信号仿真结果,图1(a)为阵首阵元信号r-f平面声强图,图1(b)为对应目标方位的波束输出,输入信噪比为0 dB,两图中呈现出具有相同斜率的条纹结构,而相比于单阵元仿真结果,水平直线阵由于能够获得阵列增益,因而具有更好的抗噪声效果,呈现出更清晰的干涉条纹。
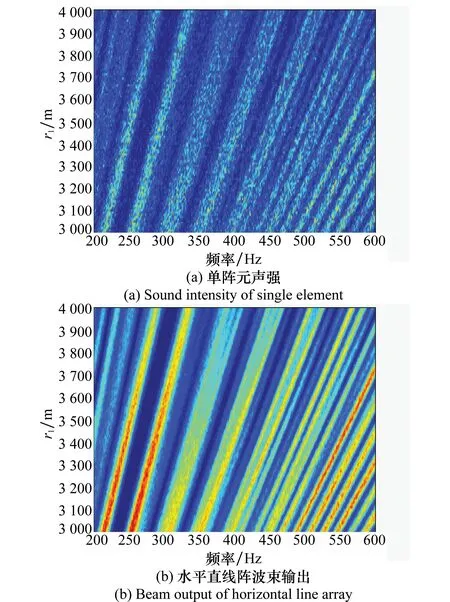
图1 LOFAR图对比Fig.1 Comparison of LOFAR grams
2 基于图像处理的运动参数提取
2.1条纹轨迹描述
当声源距离未知时,只能获得t-f平面的声强谱图,下面将声源距离通过目标参数表示为时间有关的函数,几何示意图如图2所示。
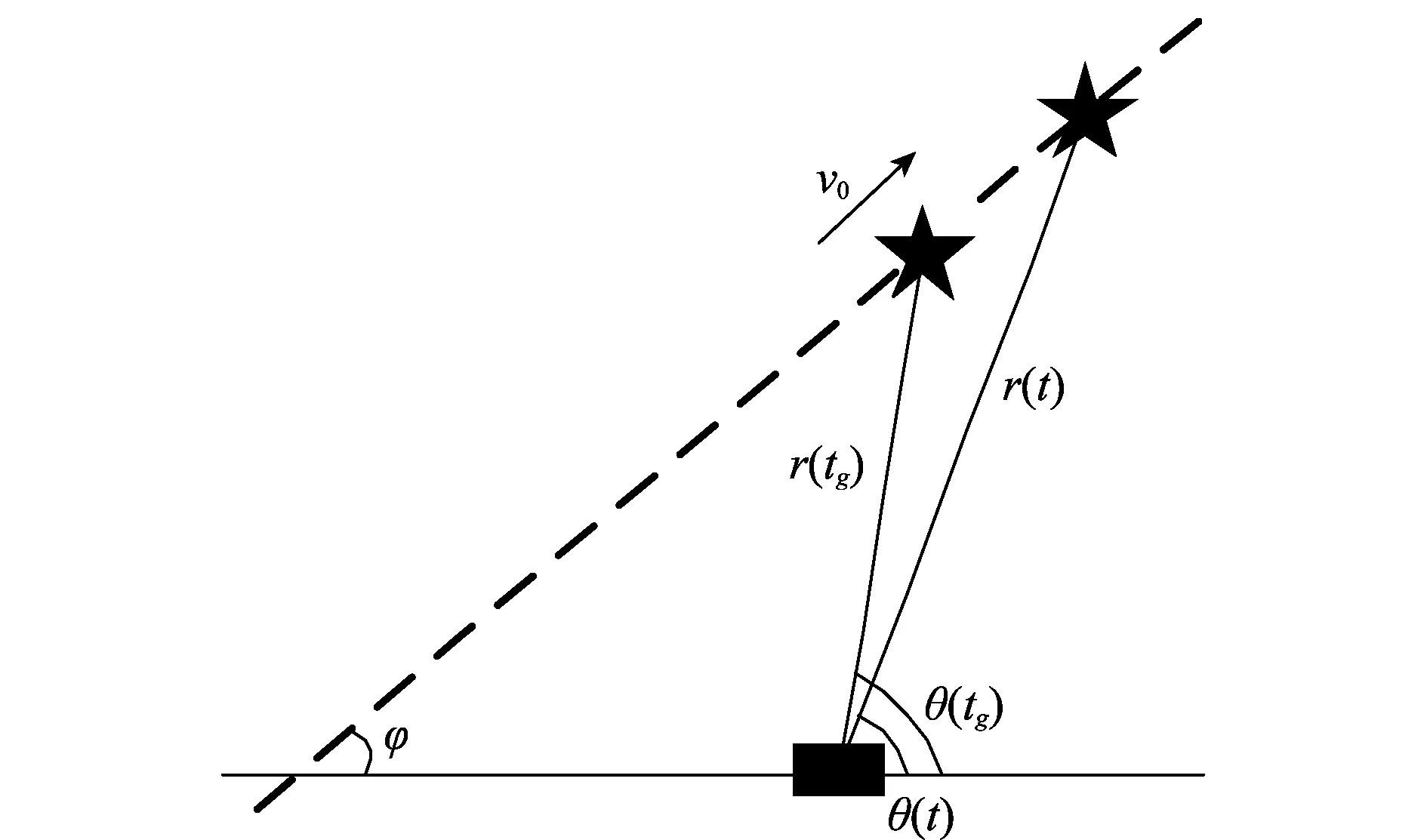
图2 几何关系示意图Fig.2 Sketch map of geometric relation
如图2所示,若接收阵列静止,运动目标与接收阵列存在图中的几何关系,声源以速度v0作匀速直线运动,tg时刻方位为θ(tg)、距离为r(tg),t时刻方位为θ(t)、距离为r(t),声源运动轨迹与水平接收阵延长线夹角为φ,则满足
(9)
将式(8)对时间积分,取tg为参考时刻,可以得到
(10)
将式(9)代入到式(10)中,则t-f平面声强图中条纹轨迹可表示为
(11)
2.2图像处理和参数估计
Hough变换是一种通过将图像空间映射到参数空间,检测参数空间峰值进而估计图像空间内曲线参数的方法。
由式(11)可以看出,对于t-f平面声强图中的干涉条纹曲线,φ、β即为图像空间的曲线参数,则通过对t-f平面声强进行Hough变换将其映射到φ-β参数空间内,便可对φ、β进行估计。
图3(a)为仿真得到的32元水平直线阵在目标方位的波束输出结果(输入信噪比-6 dB),图3(b)为其对应的Hough变换参数空间,得到的估计结果为φ=29°,β=1.03,参数真实值φtrue=30°,估计值与真实值基本一致。
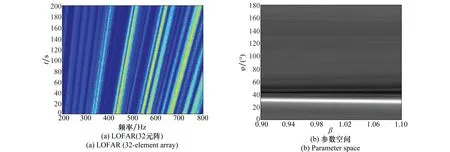
图3 Hough变换Fig.3 Hough transform
然而当信噪比很低时,不能得到如图3(a)中所示的清晰的干涉条纹,图4为仿真得到的输入信噪比-25 dB的32元水平直线阵波束输出,其余参数与图3相同。可以看出,由于噪声的影响,干涉条纹变得模糊难以分辨。
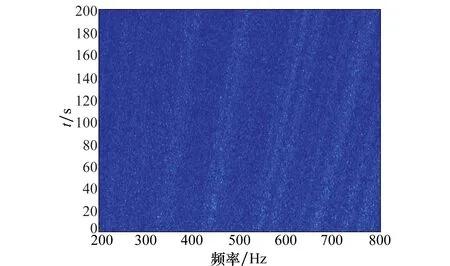
图4 LOFAR图(输入信噪比为-25 dB)Fig.4 LOFAR gram(input signal-to-noise ratio is -25 dB)
针对这一问题,本文采用图像的空域处理方法(对比度拉伸变换和中值滤波)在Hough变换之前对图像进行预处理,以提高参数估计的准确性。
图像的空域处理即直接对图像的像素进行操作[23],如式(12)所示,使图像更清晰地呈现出有用信息。

(12)
式中,f(x,y)为输入图像;g(x,y)为处理后的图像;T为图像变换运算符。
对比度拉伸变换采用的操作如式(13)所示。
(13)
该操作以m为临界值,分别将原图像中低于m和高于m的灰度级压缩到较暗和较亮灰度级的较窄范围内,从而提高输出图像的对比度。
中值滤波将图像中某一点的值用该点附近的一个邻域内各点的中值代替,从而实现抑制噪声的目的。该方法能在有效抑制噪声干扰的同时,很好地保护了图像的细节信息,是一种有效的非线性滤波技术。
对图4中LOFAR图作对比度拉伸变换和中值滤波,处理结果如图5所示。相比图4,图5较好地消除了噪声影响,保留了条纹信息,干涉条纹能够更加清晰可辨地呈现在图像中。
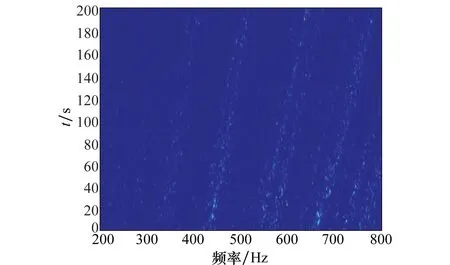
图5 图像滤波结果Fig.5 Result of image filtering
对滤波前和滤波后LOFAR图对应的参数估计性能进行100次统计分析,结果如下:①滤波前,φ平均值为31.35,相对误差为4.5%,标准差为9.33,β平均值为1.01,标准差为0.06;②滤波后,φ平均值为29.2,相对误差为2.7%,标准差为2.37,β平均值为1.01,标准差为0.06。从结果可以看出,经过图像滤波,参数估计精度得到一定提高,并且图像滤波能够在很大程度上提高参数估计的稳健性。
3 测距原理
目标与接收阵列之间的运动关系如图6所示,声源以速度v0作匀速直线运动,水平接收阵列以速度vs作匀速直线运动,声源运动轨迹与水平接收阵延长线夹角为φ1,在t时刻接收平台改变航向继续作匀直运动,该角度变为φ2=φ1+Δφ。
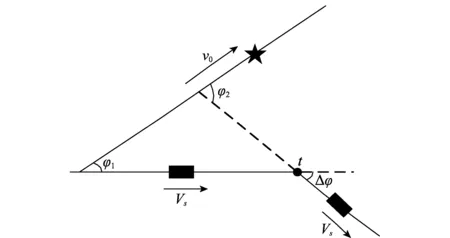
图6 运动状态示意图Fig.6 Sketch map of target’s motion
通过对t-f平面声强图进行Hough变换可对φ值进行估计,在图6所示的运动关系中,由于接收平台的运动,声源与接收阵列之间存在相对运动,这里将估计值记为带上标的φ′来加以区分。
在接收阵列的第一段匀直运动中,选取参考时刻为t1g,则声源与接收阵列的相对运动中存在的几何关系为
(14)
同理,在第二段运动过程中,可以得到
(15)
联合式(14)、式(15),并已知φ2=φ1+Δφ,可以解出
(16)
将式(16)的结果代回到式(14)和式(15)中,即可得到声源运动速度v0和目标距离r(t)的估计值。
4 算法仿真验证
目标的被动测距按照图7中所示步骤完成,下面通过仿真实例对算法进行验证。

图7 测距流程图Fig.7 Flow chart of passive ranging
仿真条件:海深60 m,声速分布为弱负梯度声速分布,如图8所示,海底声速为1 610 m/s,海底密度为1 900 kg/m3,海底吸收系数为1.9 dB/λ。接收阵列为32元水平直线阵,接收阵列以3 m/s速度航行,运动过程中发生一次转向,转向角度为30°。
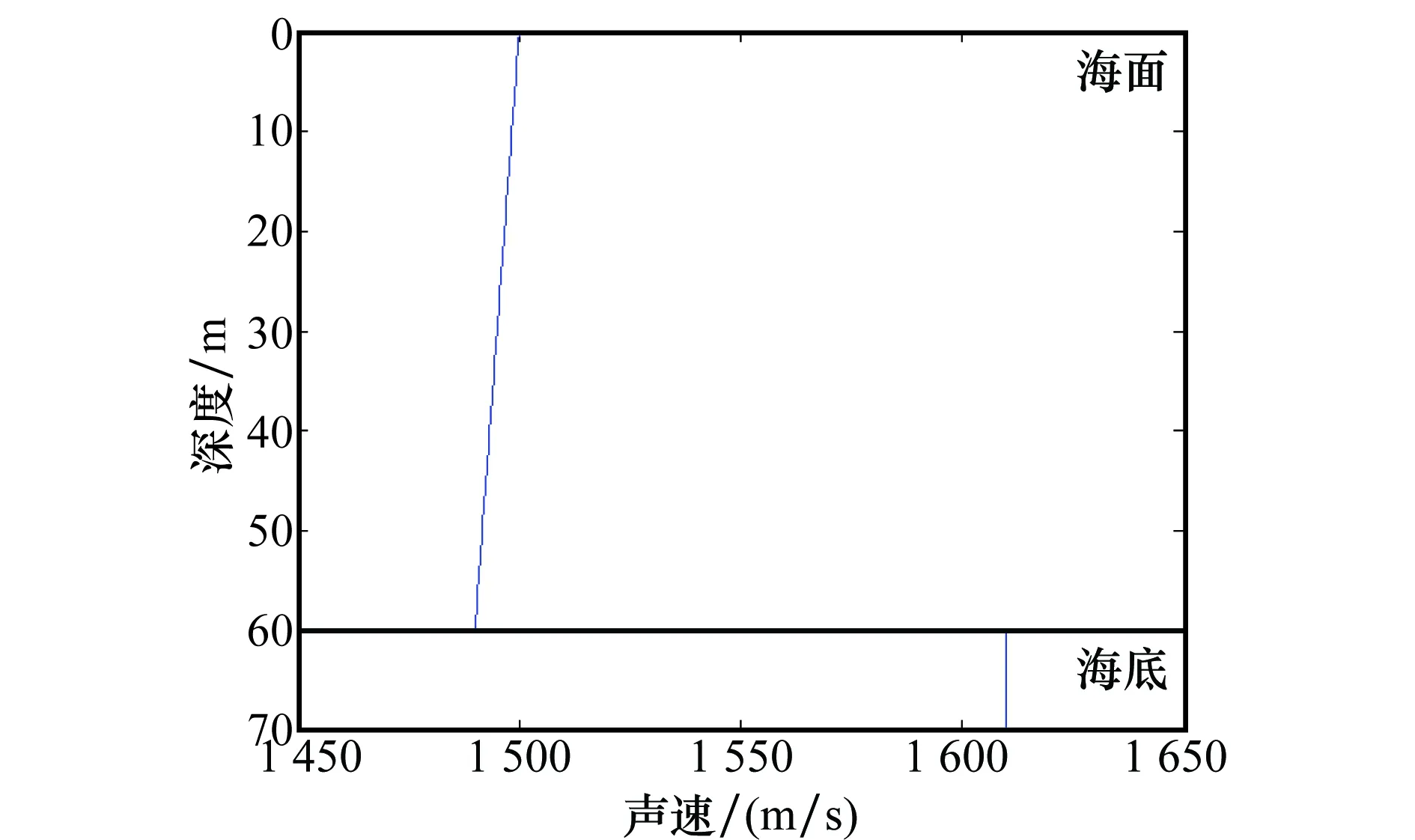
图8 声速分布Fig.8 Sound speed profile
分别仿真接收阵列发生转向前后200 s和400 s长度的各阵元接收信号,输入信噪比为-12 dB。图9为常规波束形成波束输出结果。

如前所述,将Hough变换得到的参数估计结果代入到式(16)中,得到目标航向估计值为φ1=19.8°,相对误差为1%。进而得到目标运动速度估计值为v0=4 m/s,相对误差为0。距离估计结果及误差如图11所示,可以看出,距离估计误差均在6%以内,在Hough变换选取的参考时刻附近,误差增大。
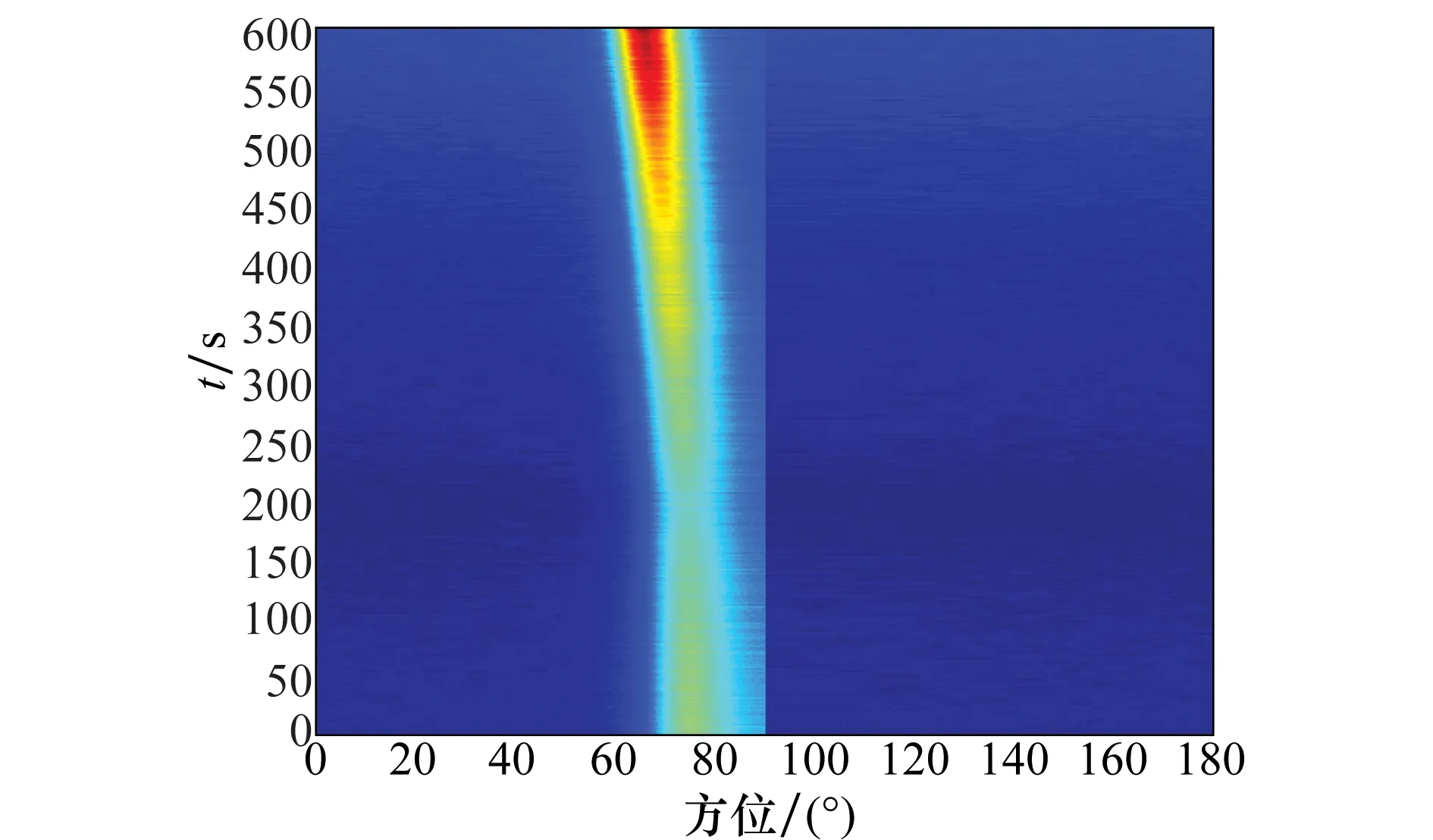
图9 方位-时间历程图Fig.9 Azimuth-time history diagram
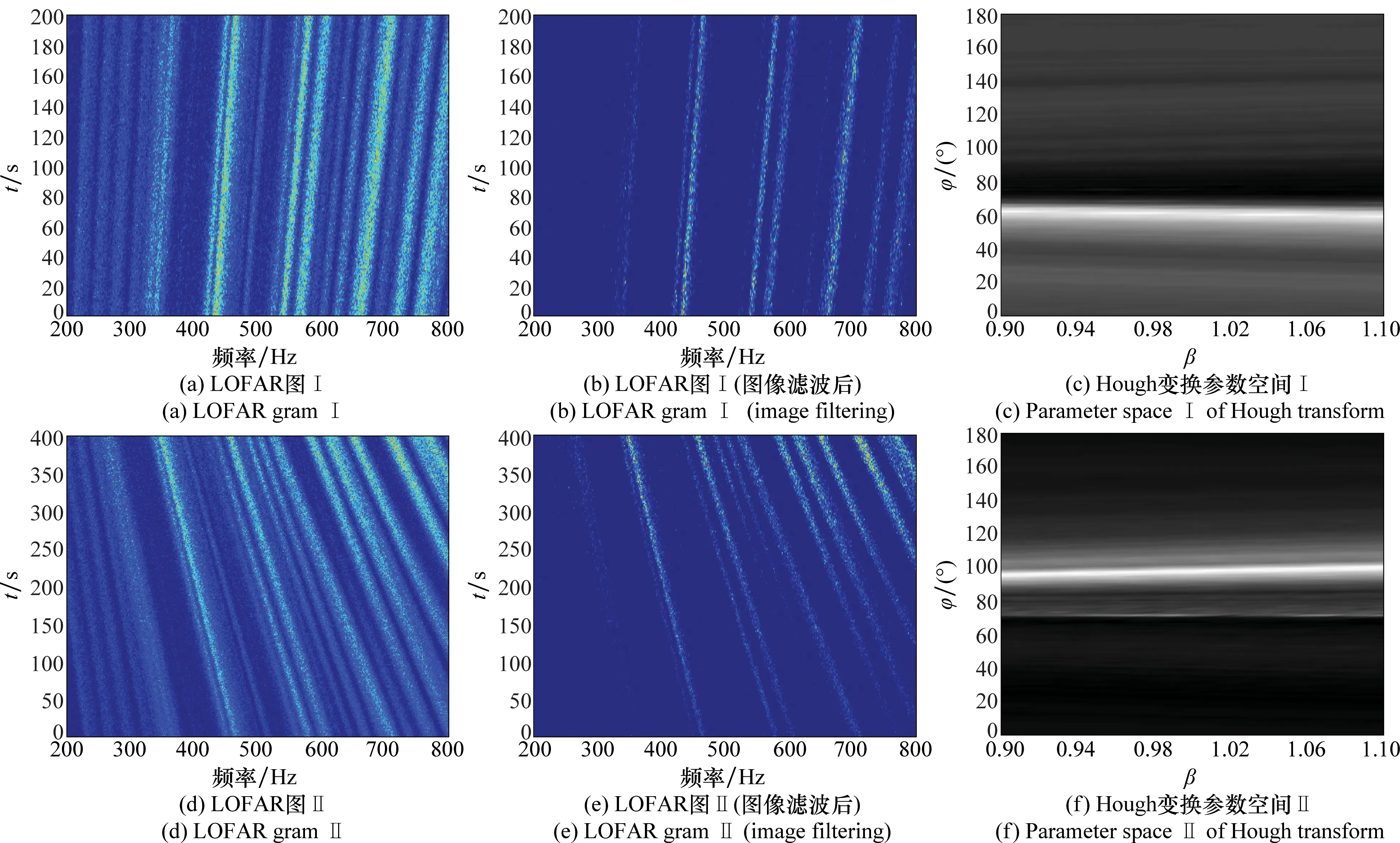
图10 LOFAR图及参数提取Fig.10 LOFAR gram and parameter extraction
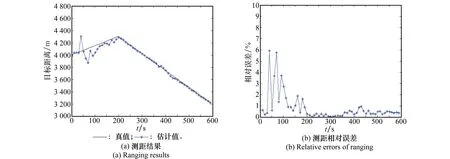
图11 测距结果及误差Fig.11 Ranging result and error
5 结 论
本文研究了一种用于运动过程中发生机动(转向)的单水平直线接收阵的目标被动测距算法。理论分析表明,相比于单水听器,水平接收阵由于能够获得阵列增益而具有更好的抗噪声能力,其波束输出声强谱图中能够呈现出更清晰稳定的干涉条纹。通过对谱图作对比度拉伸变换和中值滤波能够有效地抑制噪声的影响,在低信噪比环境下能够有效地提高Hough变换参数估计的准确性和稳健性。仿真研究结果表明,本文所提测距算法能够有效地对目标进行被动测距。
[1] Chuprov S D.Interferencestructureofasoundfieldinalayeredocean[M].Brekhovskikh L M, Andreeva I B. Ocean Acoustics: Current State. Moscow: Nauka, 1982: 71-91.
[2] Song H C, Kuperman W A, Hodgkiss W S. A time-reversal mirror with variable range focusing[J].TheJournaloftheAcousticalSocietyofAmerica, 1998, 103(6):3234-3240.
[3] Hodgkiss W S, Song H C, Kuperman W A, et al. A long-range and variable focus phase-conjugation experiment in shallow water[J].TheJournaloftheAcousticalSocietyofAmerica, 1999, 105(3):1597-1604.
[4] Kim J S, Hodgkiss W S, Kuperman W A, et al. Null-broadening in a waveguide[J].TheJournaloftheAcousticalSocietyofAmerica, 2002, 112(1):189-197.
[5] Tao H L, Krolik J L. Waveguide invariant focusing for broadband beamforming in an oceanic waveguide[J].TheJournaloftheAcousticalSocietyofAmerica, 2008, 123(3):1338-1346.
[6] Heaney K D. Rapid geoacoustic characterization: applied to range-dependent environments[J].IEEEJournalofOceanicEngineering, 2004, 29(1): 43-50.
[7] Ren Q Y, Piao S C, Hermand J P. A method for interference structure processing and its application[J].JournalofHarbinEngineeringUniversity, 2012, 33(3):296-301. (任群言, 朴胜春, Hermand J P. 一种宽带声场干涉图案处理的方法及其应用[J].哈尔滨工程大学学报, 2012, 33(3):296-301.)
[8] Ren Q Y, Hermand J P. Acoustic interferometry for geoacoustic characterization in a soft-layered sediment environment[J].TheJournaloftheAcousticalSocietyofAmerica, 2013, 133(1):82-93.
[9] Goldhahn R, Hickman G, Krolik J L. Waveguide invariant broadband target detection and reverberation estimation[J].TheJournaloftheAcousticalSocietyofAmerica, 2008, 124(5):2841-2851.
[10] He C S, Quijano J E, Zurk L M. Enhanced Kalman filter algorithm using the invariance principle[J].IEEEJournalofOceanicEngineering, 2009, 34(4): 575-585.
[11] Quijano J E, Zurk L M, Rouseff D. Demonstration of the invariance principle for active sonar[J].TheJournaloftheAcousticalSocietyofAmerica, 2008, 123(3):1329-1337.
[12] An L, Wang Z Q, Lu J R. Calculating the waveguide invariant by the 2-D Fourier transform ridges of lofargram image[J].JournalofElectronics&InformationTechnology, 2008, 80(12):2980-2988. (安良, 王志强, 陆佶人. 利用LOFAR谱图的二维傅里叶变换脊计算波导不变量[J].电子与信息学报, 2008, 80(12):2980-2988.)
[13] Cockrell K L, Schmidt H. A modal Wentzel-Kramers-Brillouin approach to calculating the waveguide invariant for non-ideal waveguides[J].TheJournaloftheAcousticalSocietyofAmerica, 2011, 130(1):72-83.
[14] Gall Y L, Bonnel J. Passive estimation of the waveguide invariant per pair of modes[J].JASAExpressLetters, 2013, 134(2): EL230-236.
[15] Yang T C. Beam intensity striations and applications[J].TheJournaloftheAcousticalSocietyofAmerica, 2003, 113(3):1342-1352.
[16] Turgut A, Orr M, Rouseff D. Broadband source localization using horizontal-beam acoustic intensity striations[J].TheJournaloftheAcousticalSocietyofAmerica, 2010, 127(1):73-83.
[17] Cockrell K L, Schmidt H. Robust passive range estimation using the waveguide invariant[J].TheJournaloftheAcousticalSocietyofAmerica, 2010, 127(5):2780-2789.
[18] Rakotonarivo S T, Kuperman W A. Model-independent range localization of a moving source in shallow water[J].TheJournaloftheAcousticalSocietyofAmerica, 2012, 132(4):2218-2223.
[19] Yu Y, Hui J Y, Zhao Z Y, et al. Passive ranging based on acoustic field interference structure using double arrays(elements)[J].ActaAcoustica, 2012, 37 (4):440-447. (余赟, 惠俊英, 赵智勇, 等. 基于声场干涉结构的双水平阵(元)被动测距[J].声学学报, 2012, 37 (4):440-447.)
[20] Ren Y, Qi Y B, Zhou S H, et al. Waveguide invariant and range estimation based on frequency-shift-compensation of underwater acoustic intensity spectrograms[J].ActaAcoustica, 2014, 39 (3):319-323. (任云, 戚聿波, 周士弘, 等. 声强谱频移补偿的波导不变量和距离估计方法[J].声学学报, 2014, 39 (3):319-323.)
[21] Li J, Sun G Q, Zhang C H, et al. Studies of waveguide invariant passive ranging of acoustics vector sensor line array[J].AppliedAcoustics,2012,31(4):249-255.(李建,孙贵青, 张春华, 等. 声矢量传感器线阵波导不变量被动测距研究[J].应用声学, 2012, 31 (4):249-255.)
[22] Li Q H. A new method of passive ranging for underwater target: distance information extraction based on waveguide invariant[J].ActaAcoustica, 2015, 40 (2):138-143. (李启虎. 水下目标被动测距的一种新方法:利用波导不变量提取目标距离信息[J].声学学报, 2015, 40 (2):138-143.)
[23] Gonzalez R C, Woods R E.Digitalimageprocessing[M].2nd ed. New Jersey: Prentice Hall, 2002: 78-85.
Passive ranging with horizontal array based on waveguide invariant
SONG Xue-jing1,2, ZHAO An-bang1,2, MA Jun1,2, BI Xue-jie1,2
(1. Acoustic Science and Technology Laboratory, Harbin Engineering University, Harbin 150001, China;2.CollegeofUnderwaterAcousticEngineering,HarbinEngineeringUniversity,Harbin150001,China)
There exist stable interference striations in the intensity plot of shallow water low frequency acoustic field, which contain target’s motion and range information. The beam intensity expression of a horizontal array receiving signal is derived. A moving target passive ranging technique with a horizontal line array is proposed. The waveguide invariant theory and the horizontal array beam intensity before and after it changes course during the motion are used for target’s passive ranging. Before estimating parameters through Hough transformation, image processing methods including contrast stretching transformation and median filtering are used to improve the accuracy and robustness of the parameter estimation in low signal-to-noise ratio environment. Theoretical analysis and simulation results show that the moving target’s range can be estimated effectively by using the algorithm proposed. There is no restriction on whether the target moves through the closest range, it is more applicable.
waveguide invariant; acoustic field interference phenomenon; horizontal line array; passive ranging
2015-11-01;
2016-03-24;网络优先出版日期:2016-07-05。
国家自然科学基金(11374072, 61371171)资助课题
O 42
A
10.3969/j.issn.1001-506X.2016.10.05
宋雪晶(1988-),女,博士研究生,主要研究方向为水声工程、水声信号处理。
E-mail:song_xuejing@163.com赵安邦(1978-),通信作者,男,教授,博士,主要研究方向为水声工程。
E-mail:zhaoanbang@hrbeu.edu.cn马骏(1991-),男,硕士研究生,主要研究方向为水声工程、水下目标识别。
E-mail:majunouc@hotmail.com
毕雪洁(1991-),女,博士研究生,主要研究方向为水声工程。
E-mail:2220346859@qq.com
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160705.1722.006.html