高亚声速靶弹拖曳式诱饵系统的拖缆姿态分析
2016-10-17荣念通丁军辉滕克难
荣念通,丁军辉,滕克难
(1.中国人民解放军91851部队,辽宁 葫芦岛 125000;2.海军航空工程学院,山东 烟台 264001)
高亚声速靶弹拖曳式诱饵系统的拖缆姿态分析
荣念通1,2,丁军辉1,滕克难2
(1.中国人民解放军91851部队,辽宁 葫芦岛 125000;2.海军航空工程学院,山东 烟台 264001)
拖缆姿态分析是高亚声速靶弹拖曳诱饵系统结构及布局设计的基础。针对常见的诱饵气动外形,利用旋成体空气动力学理论,分析估算高亚声速环境下拖曳诱饵的气动阻力。采用离散化方法,将柔软拖缆视为由多段刚体连接而成的链状结构,利用力矩平衡原理,由诱饵端起计算缆绳每一离散刚体段的姿态,并逐次向载弹拖缆定位点递推,最终近似计算出整条拖缆姿态。
拖曳式诱饵;拖缆;姿态计算
0 引言
拖曳式诱饵随载体一起运动,有针对性地实施主动红外辐射、电磁辐射或进行转发干扰,在防空导弹的导引系统视场内形成一个红外或电磁特性更强的假目标,与载体一起形成两点源欺骗干扰,迷惑防空导弹系统的搜索或跟踪过程[1]。拖曳式诱饵与飞机配合使用可有效提高载机的战斗存活率,由对舰或对地导弹拖带使用,亦可有效提高导弹武器的突防概率[2]。
本文具体研究“高亚声速靶弹+柔性拖缆+小质量干扰诱饵”构成的弹载拖曳干扰系统。工程上,确定拖缆在高速气流中的姿态是研究拖曳系统设备布局、释放策略、靶弹的飞行安全、拖曳系统工作可行性、拖揽防护等后续关键问题的前提。由于拖缆柔软姿态时变,拖缆姿态分析是拖曳系统分析设计的难点之一。
1 拖曳体气动力估算
拖曳体通常用于装载干扰源、干扰天线、供电电池等设备,拖曳体呈流线型结构,尾部通常安装用于姿态稳定的“×”形固定式稳定尾翼,整体外形尺寸较小,本身无动力,由拖缆牵引飞行,无主升力翼,自身不提供推力及气动升力,下面仅分析其气动阻力问题,图1为拖曳体外形示意图。

图1 拖曳体外形示意图
拖带过程中,拖曳体的缆绳挂点位于壳体前端上方,以挂点为力矩参考点,拖曳体本身呈轴对称结构,航向力矩自然平衡,长度短、质量小的特点使其重力力矩亦较小,高速气流中稳定尾翼产生的低头力矩很容易与之平衡,故可认为拖曳体的攻角近似为零,在下文的气动阻力分析中,按照零度攻角、忽略稳定尾翼气动阻力的前提进行处理。
拖曳体机身通常由圆滑的头部、圆柱形中部和收缩的尾部三部分构成,其中头部长细比、尾部收缩比、机身粗糙度等是影响空气阻力的关键因素,长细比越大,机体空气阻力越小。根据文献[3] 中高亚声速条件下,无圆柱形中段形状和长细比不同的旋成体(1~8)空气阻力系数的比较,可得出,形状8(长细比:1)在速度Ma数为0.85时的阻力系数约为0.3(参考面积:机身最大圆截面)。
对零攻角下钝头圆柱体及各分量阻力系数随速度Ma数的变化分析,以及锥形头部旋成体的阻力系数及各分量随速度Ma数的变化分析中[3],分别给出了带圆柱形身段的钝性头部和圆锥形头部(长细比:2.5)的旋成体空气阻力系数及各分量随速度Ma数变化的情况,可看出:
1)在全部速度Ma数范围内,旋成体的摩擦阻力系数分量占比极小,绝对值在0.01量级。
2)由于没有收缩形尾段,底部阻力系数在整个阻力系数中占比较大。
3)长细比为2.5、速度Ma数为0.85的条件下,圆锥形头部旋成体的阻力系数约为0.2。
拖曳体头部长细比取1~2之间,尾部适当收缩,根据文献[3]的实测曲线,以最大截面积为参考面积的拖曳体空气阻力系数应该在0.2~0.3之间,拖曳体直径按照12.5cm设计,据此估算拖曳体的空气阻力保持在55~83N范围内。
2 拖缆姿态分析
参照文献[4]中拖曳式诱饵运动特性建模与仿真计算方法,靶弹直线平飞状态下,拖曳体释放后,弹体、缆绳、拖曳体会在高速气流中保持相对稳定姿态,该姿态由缆绳柔韧度、缆绳质量分布特性、缆绳气动力特性、拖曳体质量、拖曳体气动外形、相对气流速度等因素共同决定。常规拖曳体呈轴对称结构,在平稳迎面气流中能始终保持左右侧向力及力矩对称平衡,细长圆柱形缆绳亦是轴对称结构,左右受力对称平衡,故直线平飞拖带过程中,缆绳相对于垂直重力面的偏角(图2角度B)保持在0°附近,下面详细分析计算缆绳相对于水平面的仰角姿态 (图2角度A)。

图2 拖缆与弹体相对姿态
首先基于离散思想,参照文献[5]中拖缆的弹簧柔性体模型,将柔软拖缆视为由多段刚体顺序连接而成的链状结构,刚体不可压缩和拉伸,任一刚体段在铅垂平面内仅受空气动力和重力作用,刚体段之间无摩擦阻力,刚体段在水平面内亦无左右摆动。然后利用力矩平衡原则,由拖曳诱饵端起算每一段虚拟刚性缆绳的姿态,依次向靶弹端推算,最终可近似确定出整条拖缆姿态。拖缆的简化示意图如图3所示,图中H为拖曳体与飞行器水平面之间的垂直距离。

图3 稳定拖带姿态简化缆绳示意图
欲分析角度A,必须首先明确缆绳的受力和拖曳体的受力情况。设拖曳体重力为MT,气动阻力大小为FT,方向与气流方向相同,升力为0;缆绳总长为L,平均直径为Φ,质量规格为M(N/m),虚拟缆绳段空气阻力按照圆柱绕流模型处理,阻力系数CD引用文献[6]中圆柱阻力系数与Reynolds数关系,阻力方向与缆绳处处垂直,在水平方向和缆绳轴线方向上有分量存在。
刚体质量为G,第i段刚体气动力与该段法线方向相同,大小为Fi-1,沿第i段刚体轴线方向作用于第i+1段刚体的作用力为Fi-1。
基于文献[7]中的单元力学模型,缆绳稳态条件下,认为连接环为相对固定点,第一段缆绳满足以下力矩平衡方程:
(G+2GT)sinA0=2FTcosA0+F0
(1)
第二段缆绳满足:
(2)
第三段至第N段满足:

(3)
式中,
G=LM/N
(4)

(5)
3 仿真分析结果
参数设定为拖曳体质量分为1kg、5kg、10kg三个规格,空气阻力分别估计为30N、80N,缆绳特性为:总长50m,阻力系数1.2,分段数250,质量规格为0.024kg/m,直径为2mm。利用式(1)~(5)计算出的缆绳姿态如图4~9所示。
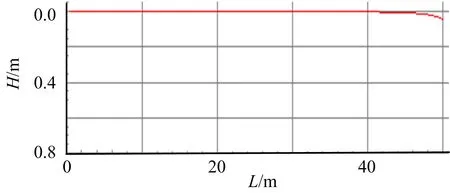
图4 拖曳体阻力30N、质量1kg时缆绳姿态
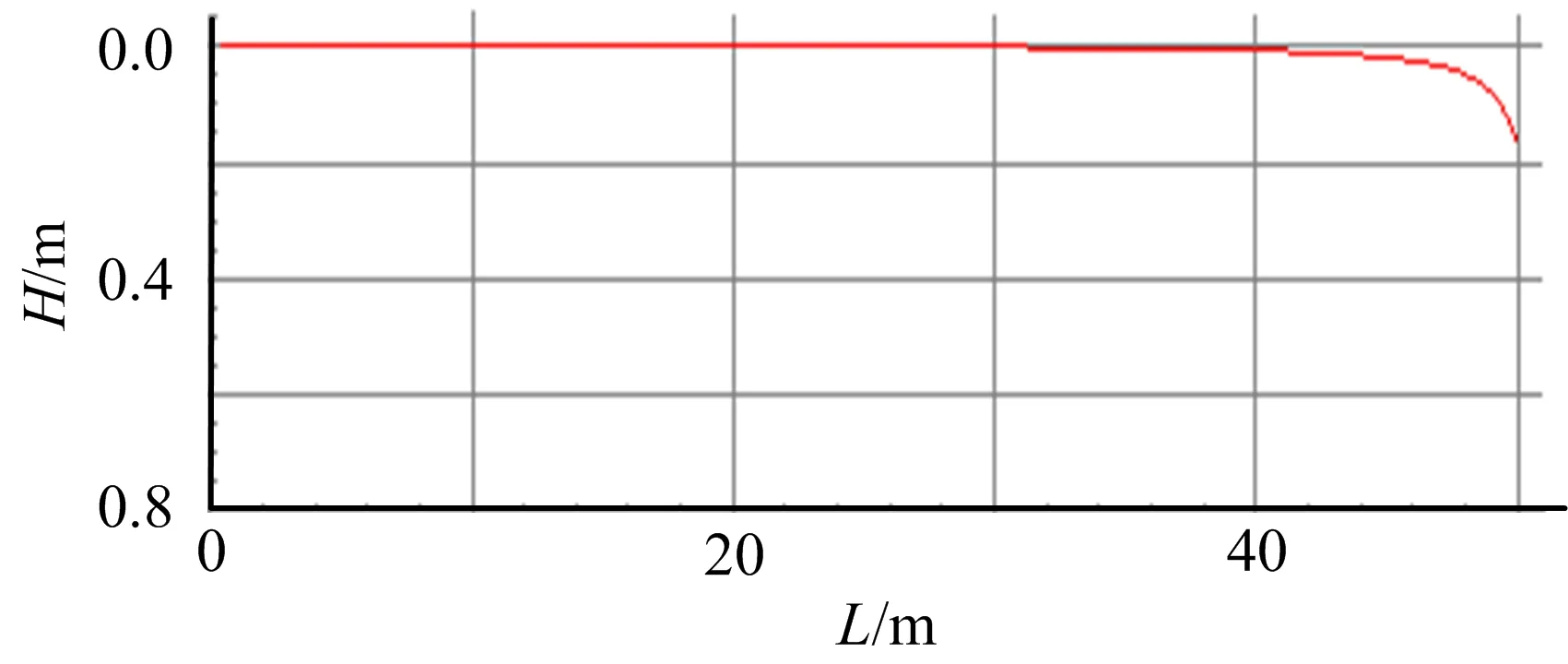
图5 拖曳体阻力30N、质量5kg时缆绳姿态

图6 拖曳体阻力30N、质量10kg时缆绳姿态

图7 拖曳体阻力80N、质量1kg时缆绳姿态

图8 拖曳体阻力80N、质量5kg时缆绳姿态

图9 拖曳体阻力80N、质量10kg时缆绳姿态
4 结束语
本文基于离散思想和力矩平衡方法构建了拖缆的姿态分析计算模型,并给出典型状态下的姿态计算结果,由仿真分析结果可看出,在高亚声速条件下,近靶弹端拖缆很长一段距离与气流平直,在拖曳诱饵端,诱饵质量越大,缆绳弯曲越多,诱饵下降越大。鉴于上述结论,在进行拖曳诱饵系统布设设计时,拖缆的释放点(缆车伸出点)应尽量选择在靶弹尾部或释放点后方为净空的区域,以避免平直的拖缆与弹体发生刮蹭、缠绕等影响飞行安全的问题发生。■
[1]李新虎,王晟达,甘轶,等. 一种预警机拖曳式双诱饵方案诱骗反辐射导弹效能分析[J]. 弹箭与制导学报,2011,31(8): 57-61.
[2]陈义,崔艳鹏,钟昭. 有源拖曳式诱饵的干扰样式及对抗措施探讨[J].航天电子对抗,2011,27(5):10-12, 60.
[3]克拉斯诺夫HO.旋成体空气动力学[M].北京:科学出版社,1965.
[4]芦艳龙,童中翔,于锦禄,等.拖曳式诱饵运动特性建模与仿真计算[J].飞行力学,2010,28(5):24-26.
[5]张登成,唐硕.拖缆的弹簧柔性体模型在拖曳式空中发射系统中的应用研究[J].导弹与航天运载技术,2005,277(4):43-46.
[6]Schlichting H. Boundary layer theory[M]. New York : McGraw-Hill,1960.
[7]胡晓楠,张建斌,赵国伟. 柔性绳索在空气阻力作用下的动力学仿真研究[J]. 机械科学与技术, 2010, 29(10):1334-1337.
Attitude analysis of towline tied with towed decoy in high subsonic flying
Rong Niantong1,2, Ding Junhui1, Teng Kenan2
(1.Unit 91851 of PLA,Huludao 125000,Liaoning,China;2.Naval Aeronautical Engineering Institute,Yantai 264001,Shandong,China)
Attitude analysis of towline is the base of whole construction and layout design of towed decoy systems. For the usual aerodynamic configuration scheme of given decoy, the aerodynamic resistance of decoy in high subsonic flying is analyzed and calculated using the method of spinning projectile aerodynamics. Using the discrete method of continuous system, the soft towline is regarded as the rigid body chains which joined one by one. Based on the moment-equilibrium theory, the attitude of the rigid body chain is calculated firstly at the side of the decoy. And then recurrence is made to the next, until the location point of the towline in missile. Finally the whole attitude of the towline is concluded approximatively.
towed decoy; towline; attitude calculation
2016-06-15;2016-07-11修回。
荣念通(1988-),男,助理工程师,硕士研究生,主要研究方向为导弹武器系统试验及飞行器系统设计与研究。
TN97
A
