基于图像透视畸变校正的调炮速度测量方法
2016-10-15王延海王晓曼李玉山景文博王子赫
王延海,王晓曼,李玉山,景文博,王子赫
(1.长春理工大学电子信息工程学院,吉林长春130022;2.中国白城兵器试验中心,吉林白城137001;3.长春理工大学光电工程学院,吉林长春130022)
基于图像透视畸变校正的调炮速度测量方法
王延海1,王晓曼1,李玉山2,景文博3,王子赫1
(1.长春理工大学电子信息工程学院,吉林长春130022;2.中国白城兵器试验中心,吉林白城137001;3.长春理工大学光电工程学院,吉林长春130022)
针对传统调炮速度测试过程繁琐、测量精度低的问题,提出了一种图像透视畸变校正的调炮速度测量方法。采用激光器、靶板、CCD相机和计算机构建调炮速度测量系统,利用CCD相机实时记录激光在靶板上的光斑位置,根据光斑的位移和时间解算出调炮速度。利用特征点成像,通过透视变换原理构建变换矩阵求得图像校正模型,进而实现光斑靶板图像的透视畸变校正,在校正后的图像上提取光斑并计算出光斑质心,获取光斑质心的位移和时间,最终解算出调炮速度。实验结果表明:与传统的图像测量方法相比,利用该方法测量调炮速度的精度提高了10倍,满足靶场对高精度测量调炮速度的要求;该方法适用于靶场测试以及其他调炮速度的实际测量工程。
兵器科学与技术;图像处理;调炮速度;透视变换;畸变校正
0 引言
调炮速度是装甲车辆武器系统的一项静态测试指标,是炮控系统在复杂战场环境中是否满足战术技术指标的评定方式[1]。随着信息技术的飞速发展,武器装备的不断升级,对于调炮速度测量的快速性和准确性要求也越来越高。目前,常用的调炮速度测量方法有人工秒表法、陀螺仪法和图像法。人工秒表法,采用秒表人工记录火炮调转固定角度所用的时间,进而计算得到调炮速度,该方法受人为因素影响严重,导致测量结果偏差较大,测量精度很低;陀螺仪法[2-4],是通过计算机采集陀螺仪传感器输出的电压信号,来实现调炮速度的测量,该方法虽然可以实现调炮速度的实时测量,但是受地球自转、温度、电磁场等外界因素影响较大,测量精度低,测量稳定时间较长;图像法[5-6],采用炮口处的相机实时采集带坐标纸的靶板图像,利用图像处理技术识别靶板图像上坐标计算调炮速度,该方法虽然操作简单、测量速度快,但是在实际测量中,该方法存在几点不足:首先相机尺寸受到炮口口径的限制,其次相机成像质量受炮口抖动影响较大,再次采集的图像存在透视畸变,导致调炮速度测量结果误差较大。在上述不足中图像的透视畸变对调炮速度的测量精度影响较大,因此图像的透视畸变校正成为图像测量法的关键技术和重要问题,目前该方面文献鲜见报道。
针对上述问题,本文构建了调炮速度测量系统,消除了传统图像法火炮口径和相机尺寸间的制约,同时提高了成像质量。在构建调炮速度测量系统的基础上建立了调炮速度测量数学模型,根据相机和靶板的位置关系建立图像透视畸变校正模型,对采集的靶板图像进行透视畸变校正,提高了调炮速度的测量精度。本文方法能够解决大视场,近距离目标测量时的畸变问题,且实验简单易操作,可在实际工程中广泛使用。
1 调炮速度测量原理
1.1调炮速度测量系统概述
图1是调炮速度测量系统原理图,测量系统由激光器、靶板、CCD相机和计算机组成。靶板置于火炮炮口正前方,激光器固定在火炮炮口处,利用激光器随火炮炮口移动将火炮转动的角度转化为光斑在靶板上的位移。CCD相机实时采集光斑靶板图像并保存,事后提取图像中的光斑,计算光斑质心位置。根据图像上的光斑的位移求得光斑实际移动位移,从而计算火炮的转动角度Δθ,并根据其对应的时间间隔,最终解算出调炮速度。
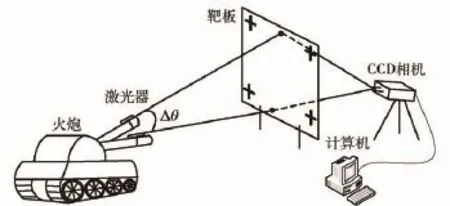
图1 调炮速度测量原理图Fig.1 Schematic diagram of gun slaving speed measurement
1.2调炮速度测量数学建模
调炮速度是火炮单位时间内转动的角度,实质上是对测量调炮角度和调炮时间的测量,图1中调炮过程中光斑由某一点移动到另一点,调炮角度为Δθ,调炮时间为Δt,则调炮速度ω为

式中:Δs为光斑在图像上的位移;μ为光斑在实际靶板上的位移与光斑在图像上的位移比;d为火炮与靶板的距离。根据图像上光斑的位置,可求得光斑在图像上的位移Δs为

如图2所示,调炮速度的测量主要在于利用图像计算光斑位移Δs及调炮时间Δt,它们的测量精度影响着最终调炮速度的测量精度。Δt是由相机帧频决定且测量精度高,对调炮速度测量精度影响很小,故调炮速度的测量关键在于对Δs的测量。目前光斑质心提取的算法比较成熟,提取精度较高[7],而图像畸变严重影响着Δs的测量精度。设畸变的光斑图像为ft(x,y),则校正后的光斑图像可表示为

2 图像透视畸变校正
利用CCD相机测量光斑的位移时,相机无法完全正对靶板成像,相机的光轴与靶板的法向量存在夹角。根据相机的成像原理,靶板图像存在透视畸变,相机距离靶板较近,靶板几乎占据整个相机成像视场,因此图像畸变对调炮速度测量结果影响较大。为了提高调炮速度的测量精度,识别靶板图像光斑

图2 调炮速度测量数据处理流程图Fig.2 Flow chart of gun slaving speed measurement data processing
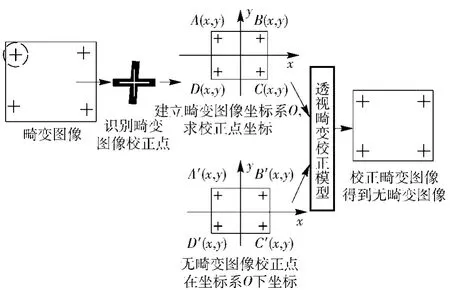
图3 靶板图像校正流程图Fig.3 Flow chart of target plate image correction
2.1图像畸变校正模型构建
如图4所示,以相机成像面的中心为坐标系原点O,相机光轴为z轴,取摄影方向为正,相机成像平面的水平方向、垂直方向分别为x轴、y轴建立空间坐标系,得到靶板透视成像示意图。为了获取理想的靶板图像,需根据透视变换原理,将靶板以H点为中心分别绕x轴、y轴、z轴方向旋转一定角度,直到靶板垂直于相机主光轴方向的正视位置[10-11]。
实际物体是用三维空间表征的,而靶板所成的图像是二维的,利用仿射变换和透视变换的映射关系,将畸变图像转化为相机正视目标图像的过程在二维平面进行[12-13]。如图4所示,设畸变图像上的任意点坐标为(x,y),齐次坐标为(x,y,1),对畸变图像上任意点坐标做校正变换,校正后的坐标[14-18]为

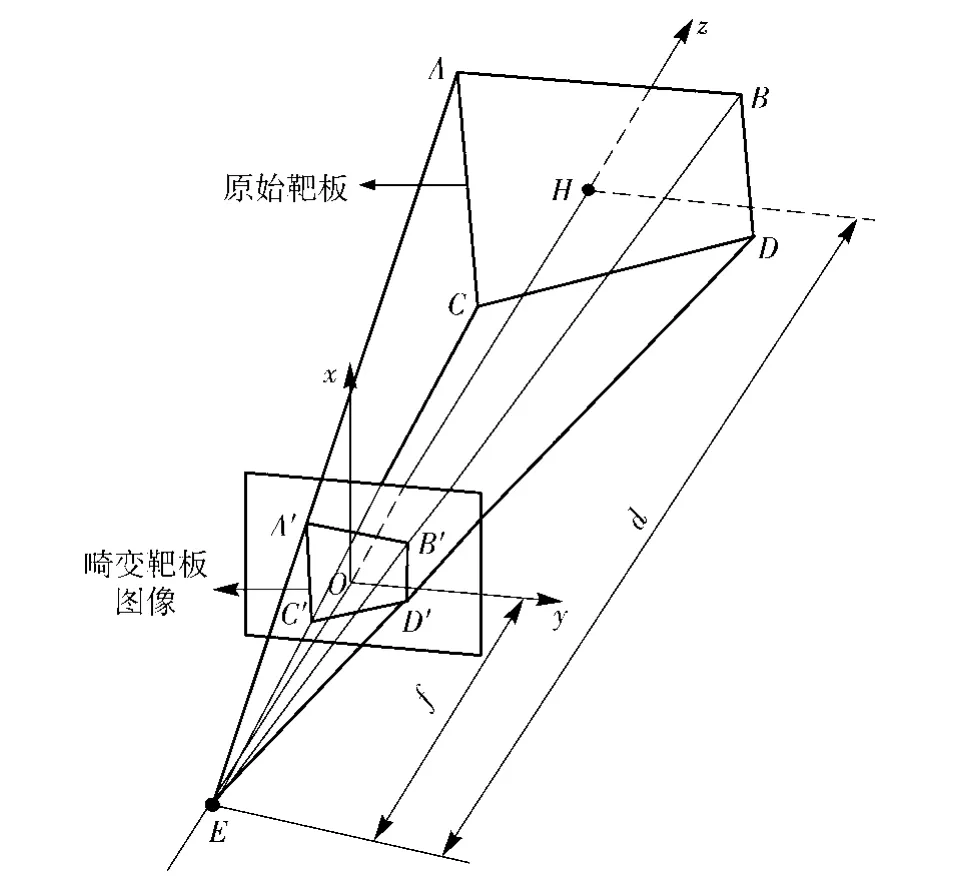
图4 靶板成像的示意图Fig.4 Schematic diagram of target plateimaging
式中:T为畸变校正模型矩阵;SH为水平偏移矩阵;
SV为垂直偏移矩阵;O为平移矩阵;F为子透视变换矩阵;R为旋转变换矩阵;K为尺度变换矩阵。(4)式中的各矩阵如下所示:

式中:θ为图像绕中心旋转角度;k为图像尺度变换参数;tx、ty为图像沿坐标轴平移参数;sh、sv分别为图像水平和垂直偏移参数;fv、fh分别为图像水平和垂直透视变换参数。
2.2图像透视投影畸变校正的具体实现
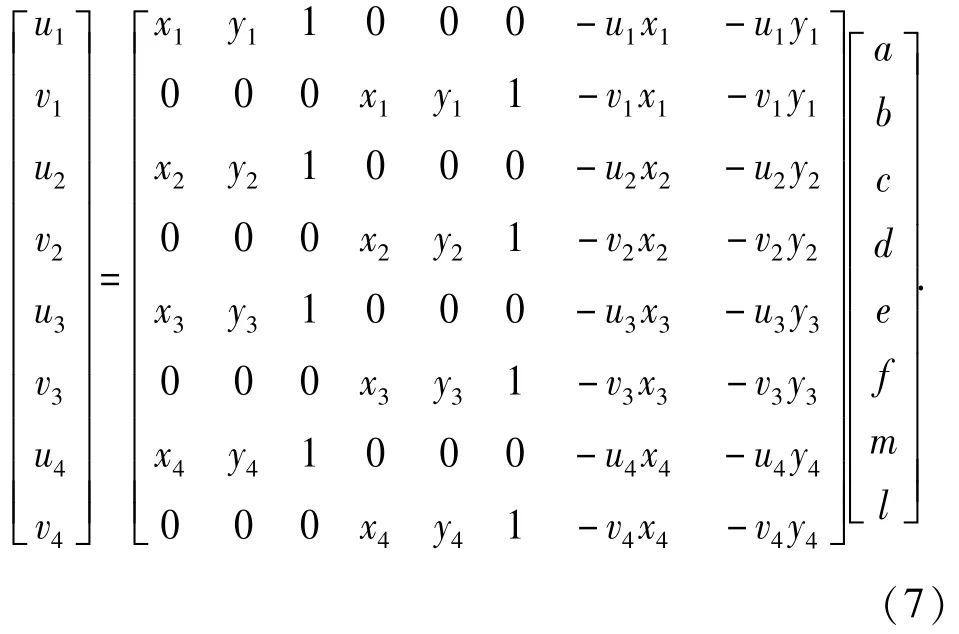
在靶板的4个角处贴上“十”字作为控制点标识,利用实际靶板的4对特征点与对应畸变图像上的点求取校正模型。设对应畸变图像任意点的正视靶板齐次坐标为(u,v,1),根据(4)式可知:透视图像畸变校正模型为
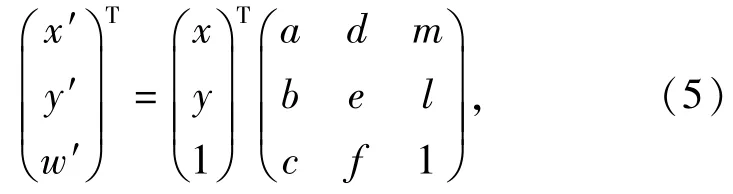
式中:u=x′/w′,v=y′/w′,即

式中:(x,y)是畸变图像像素点坐标;(u,v)是实际靶板4个十字中心点坐标;a、b、c、d、e、f、m、l是透视变换参数。将靶板上4个十字中心点坐标分别记为(u1,v1),(u2,v2),(u3,v3),(u4,v4),对应畸变图像4个十字中心坐标分别为(x1,y1),(x2,y2),(x3,y3),(x4,y4),由(6)式可得的透视变换参数方程为
由此可以求得畸变校正参数,根据(4)式和(5)式可得
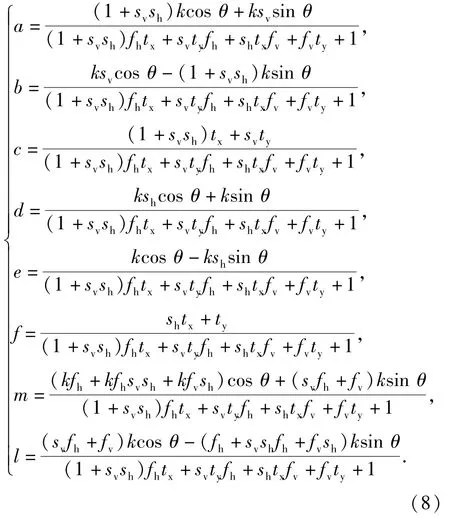
由(8)式可求得畸变模型中的旋转角度、尺度变换大小、垂直变换参数和水平变换参数、透视变换大小和平移的大小。实时测量过程中,相机在每个固定位置的校正模型相同,因此利用(8)式求得校正模型可将实际靶板的图像去畸变得到校正后靶板图像。
3 实验与数据分析
图像透视畸变校正的调炮速度测量系统由激光器、靶板、CCD相机、计算机和图像处理软件等组成。激光器波长为532nm,光束发散角为3mrad,光斑直径约为3mm;靶板大小为8m×6m,靶板上的十字长为20cm,宽为6cm,4个十字中心标记按矩形形式排列,宽、高间距分别7.8m和5.8m;CCD相机分辨率为1392×1040,像元尺寸为4.65μm× 4.65μm,镜头焦距为8mm,帧频为100帧/s.
为了验证本文提出的图像透视畸变校正调炮速度测量方法的精度及稳定性,设计如下实验:将测试靶板放置在距离火炮回转中心正前方5m处,靶板上标记4个“十字”作为校正特征点,激光器固定于火炮炮口处,调整相机使靶板完全处于CCD相机视场内。调整相机位置使其光轴与靶板法向量在水平方向上呈不同的角度δ(以火炮正视靶板方向为基准,相机在火炮右侧时所成角度为正),如图5列举了δ≈-45°,δ≈-30°,δ≈-15°,δ≈15°,δ≈30°和δ≈45°的畸变图像。
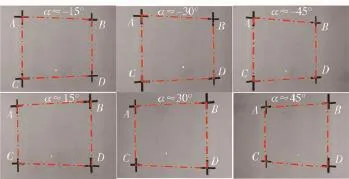
图5 相机光轴与靶板法向量呈不同角度的畸变图像Fig.5 Distorted images of optical axis of camera and normal vector of target plate at different angles
由图5可知,|δ|越大,图像畸变越大,光斑计算误差越大,因此需要对图像进行畸变校正。以图像左下角像素点为图像坐标系原点,δ≈15°,δ≈-30°,δ≈45°,δ≈-45°对应的畸变图像上特征点A、B、C、D图像坐标分别为:δ≈15°:{(56,998),(1377,1025),(56,47),(1377,15)};δ≈-30°:{(15,1025),(997,978),(15,15),(997,62)};δ≈45°:{(160,955),(1377,1025),(160,83),(1377,15)};δ≈-45°:{(15,1025),(945,955),(15,15),(945,83)}。其中,A、B、C、D分别为图像上左上角、右上角、左下角、右下角特征点。以靶板左下角特征点C为坐标原点,靶板4个特征点A、B、C、D的实际坐标为:(0,580),(780,580),(0,0),(780,0)。
以δ≈-45°的畸变图像为例,将畸变图像上的校正特征点A、B、C、D及对应的实际坐标代入(7)式,得畸变校正参数,将畸变校正参数代入(5)式得畸变校正模型。利用畸变模型对畸变光斑靶板图像进行透视畸变校正,校正效果如图6所示。
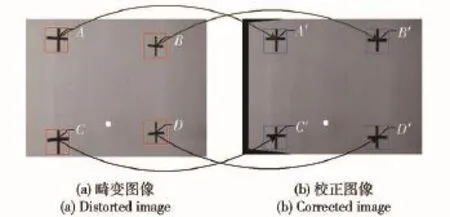
图6 透视畸变校正效果图Fig.6 Perspective distortion correction image
对畸变图像和校正图像分别进行阈值分割,并采用二维Hough变换检测出光斑,进而计算出光斑质心,解算光斑位移量,示意图如图7所示。

图7 δ≈-45°时光斑位移示意图Fig.7 Schematic diagram of spot displacement for δ≈-45°
图7中,g1、g2分别为第n帧和第m帧畸变图像光斑质心位置,Δs为其光斑质心位移量,g′1、g′2分别为第n帧和第m帧校正图像光斑质心位置,Δs′为其光斑质心位移量。由CCD相机帧频获取光斑位移所对应时间Δt,由(1)式得到图像校正前后火炮调炮速度ω.
相机在δ≈15°位置,火炮分别以速度15°/s、30°/s、60°/s进行调炮测量,3次测量的火炮调炮速度曲线如图8所示。

图8 相机在相同位置下不同调炮速度曲线图Fig.8 Different curves of gun slaving speeds taken by camera at the same position
由图8可知,火炮在调炮初期存在加速过程,速度不稳定,影响最终调炮速度测量精度。为了准确计算调炮速度,在测量中选取速度相对稳定时段的光斑靶板图像进行调炮速度计算。从图8可以看出,在第300~1000ms时段调炮速度趋于稳定,所以本实验选取该时段的光斑靶板图像进行计算。
为了验证本文透视畸变校正算法的有效性和稳定性,测量相机在不同位置的调炮速度,分别将相机摆放在δ≈15°,δ≈-30°,δ≈45°位置处,在俯仰方向上以30°/s进行调炮,每个位置分别采集500组实验数据。图9为由畸变图像和校正图像计算得到的火炮调炮速度对比曲线图。
图9中的数据是以恒定速度30°/s进行调炮,相机在不同位置由校正和畸变图像计算得到调炮速度结果,横坐标代表测量次数,纵坐标代表第N{n= 1,2,…,500}次测量值计算的调炮速度结果。由图9中对比曲线可知:相机摆放位置与靶板法向量夹角越大,由畸变图像计算的调炮速度曲线偏离真实值越大;而由校正后图像计算的火炮调炮速度曲线一直在真实值上下波动,检测精度高且不受相机摆放位置影响。
为了验证图像透视畸变校正计算调炮速度的方法的有效性,相机在δ≈15°位置不变的情况下,分别以15°/s、30°/s、60°/s速度调炮,在每个速度下分别采集500组实验数据,对比曲线如图10所示。
图10中横坐标代表测量次数,纵坐标代表第N{n=1,2,…,500}次测量值计算的调炮速度结果。由图10可知,在不同调炮速度下,由校正图像计算得到的调炮速度结果与真值比误差较小,表明该方法对不同调炮速度能够进行有效测量。
为了进一步说明本文计算调炮速度方法的稳定性和准确性,以调炮速度ω=15°/s为例,计算相机在不同位置,由校正图像和畸变图像得到的调炮速
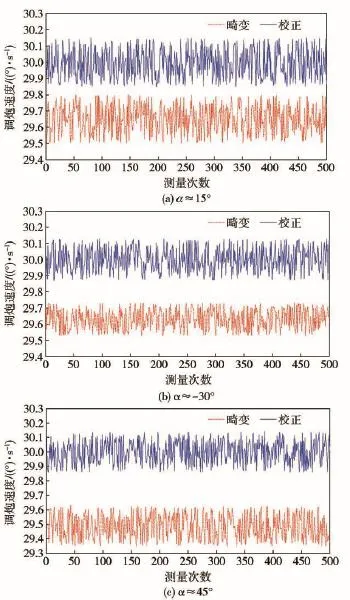
图9 相机在不同位置下调炮速度对比Fig.9 Gun slaving speeds taken by camera at different positions

表1 调炮速度均值偏差Tab.1 Gun slaving speed mean deviation
由表1中数据可知,相机在不同位置时,由校正图像计算得到的调炮速度均值偏差,小于畸变图像计算得到的调炮速度均值偏差,调炮速度测量结果更准确。由表1中数据计算,采用透视畸变校正方法调炮速度标准差为0.01°/s,相较于未畸变校正的调炮速度标准差0.14°/s精度提高了10倍。可知该方法可以对火炮的调炮速度进行更准确测量,稳定度高。
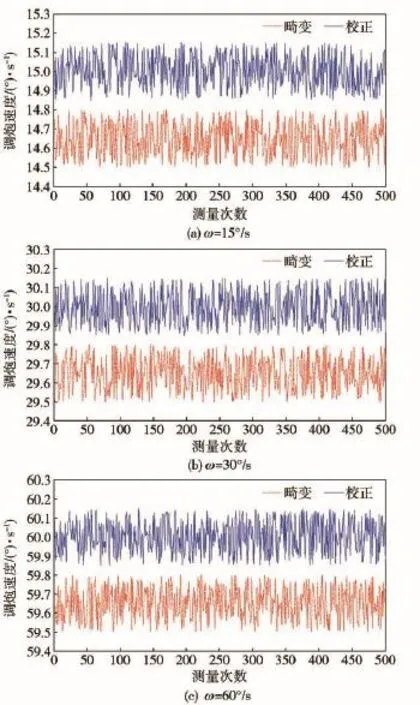
图10 相机在相同位置下不同调炮速度对比Fig.10 Different gun slaving speeds taken by camera at the same position
4 结论
本文提出一种图像透视畸变校正的调炮速度测量方法,采用CCD相机实现火炮调炮速度的非接触式测量,能够有效地消除人为误差,提高测量精度;通过透视变换原理构建变换矩阵求得图像校正模型,对采集到的光斑靶板图像进行透视畸变校正,消除了图像畸变对测量带来的影响;采用高帧频相机实时地记录激光光斑位置,利用相机的帧频得到调炮时间,最终根据激光光斑的位移和时间解算出调炮速度。实验表明:与传统图像法比较,该方法在调炮速度的测量精度上提高了10倍,操作简单易于实现,满足靶场测试中对高精度调炮速度测量要求。
(References)
[1] 朱竞夫,赵碧君,王钦钊.现代坦克火控系统[M].北京:国防工业出版社,2003. ZHU Jing-fu,ZHAO Bi-jun,WANG Qin-zhao.Modern tank fire control system[M].Beijing:National Defense Industry Press,2003.(in Chinese)
[2] 康葳,董田沼,杨国振,等.基于角速度传感器的火炮调炮速度测量系统[J].计算机测量与控制,2012,20(9):2454-2456. KANG Wei,DONG Tian-zhao,YANG Guo-zhen,et al.Design of measuring system of angular velocity based on sensor technology[J].Computer Measurement and Control,2012,20(9):2454-2456.(in Chinese)
[3] 宋海峰,邓浩,张蓉,等.小角度随机往复振动条件下陀螺姿态测量研究[J].兵工学报,2008,29(4):412-414. SONG Hai-feng,DENG Hao,ZHANG Rong,et al.Measurement model for attitude of gyro at small angle random to-and-fro vibration[J].Acta Armamentarii,2008,29(4):412-414.(in Chinese)
[4] 白长瑞,张舟,赵岩.一种基于NTD的ISP框架相对角速度测量方法[J].仪器仪表学报,2012,33(9):1946-1951. BAI Chang-rui,ZHANG Zhou,ZHAO Yan.NTD based measurement of the relative angular velocity of ISP gimbal[J].Chinese Journal of Scientific Instrument,2012,33(9):1946-1951.(in Chinese)
[5] 田澍.基于图像处理的炮塔角速度测量方法研究[D].长春:长春理工大学,2013. TIAN Shu.Based on image processing the turret angular velocity measurement method[D].Changchun:Changchun University of Science and Technology,2013.(in Chinese)
[6] 李静,王军政,汪首坤,等.基于双靶面的火炮动态稳定精度测试方法[J].仪器仪表学报,2010,31(10):2328-2333. LI Jing,WANG Jun-zheng,WANG Shou-kun,et al.Artillery dynamic stability precision test method based on dual-target[J]. Chinese Journal of Scientific Instrument,2010,31(10):2328-2333.(in Chinese)
[7] 夏爱利,马彩文.基于图像处理技术的光斑质心高精度测量[J].光电子·激光,2011,22(10):1542-1545. XIA Ai-li,MA Cai-wen.Measurement of focal spot centroid based on image processing[J].Journal of Optoelectronics·Laser,2011,22(10):1542-1545.(in Chinese)
[8] Chen X P,Yu S,Ma Z L.An improved mean shift algorithm for object tracking[C]∥The World Congress on Intelligent Control and Automation(WCICA)2008.Chongqing,China:IEEE,2008.
[9] 黄一万,朱国力.基于形态学滤波的激光标靶中激光光斑的识别[J].微计算机信息,2012,28(9):56-58. HUANG Yi-wan,ZHU Guo-li.Laser spot recognition in laser system morphological filter[J].Micro Computer Information,2012,28(9):56-58.(in Chinese)
[10] 黄书海,殷建平,祝恩,等.基于局部透视变换的圆柱体侧表面PDF417条码矫正方法[J].计算机工程与科学.2012,34(9):93-97. HUANG Shu-hai,YIN Jian-ping,ZHU En,et al.A rectification method based on local perspective transformation for PDF417 barcode upon cylinder side surface[J].Computer Engineering and Science,2012,34(9):93-97.(in Chinese)
[11] 蔡国榕,李绍滋,吴云东,等.一种透视不变的图像匹配算法[J].自动化学报,2013,39(7):1053-1061. CAI Guo-rong,LI Shao-zi,WU Yun-dong,et al.A perspective invariant image matching algorithm[J].Acta Automatica Sinica,2013,39(7):1053-1061.(in Chinese)
[12] 傅卫平,秦川,刘佳,等.基于SIFI算法的图像目标匹配与定位[J].仪器仪表学报,2011,32(1):163-169. FU Wei-ping,QIN Chuan,LIU Jia,et al.Matching and location of image object based on SIFT algorithm[J].Chinese Journal of Scientific Instrument,2011,32(1):163-169.(in Chinese)
[13] 张丕壮,路宏年.面阵CCD微光像感器图像的校正[J].兵工学报,2000,21(4):362-364. ZHANG Pi-zhuang,LU Hong-nian.The correction of image photographed by CCD image sensors[J].Acta Armamentarii,2000,21(4):362-364.(in Chinese)
[14] Wang X,Klette R,Rosenhahn B.Geometric and photo-metric correction of projected rectangular pictures[C]∥Proceedings of International Conference on Image and Vision Computing 2005. Dunedin,New Zealand:IAPR,2005:223-228.
[15] Tekalp A M.数字视频处理[M].北京:清华大学出版社,1998. Tekalp A M.Digital video processing[M].Beijing:Tsinghua U-niversity Press,1998.(in Chinese)
[16] 苏成志,王恩国,郝江涛,等.平面几何测量中的图像畸变校正[J].光学精密工程,2011,19(1):161-167. SU Cheng-zhi,WANG En-guo,HAO Jiang-tao,et al.Distortion correction for images in planar metrology[J].Optics and Precision Engineering,2011,19(1):161-167.(in Chinese)
[17] 张振,徐枫,沈洁.基于变高单应的单目视觉平面测量方法[J].仪器仪表学报,2014,35(8):1861-1868. ZHANG Zhen,XU Feng,SHEN Jie.Plane measurement method with monocular vision based on variable-height homography[J]. Chinese Journal of Scientific Instrument,2014,35(8):1861-1868.(in Chinese)
[18] 熊大曦,刘云,梁永,等.共振扫描显微成像中的图像畸变校正[J].光学精密工程,2015,23(10):2972-2977. XIONG Da-xi,LIU Yun,LIANG Yong,et al.Correction of distortion in microscopic imaging with resonant scanning[J].Optics and Precision Engineering,2015,23(10):2972-2977.(in Chinese)
Gun Slaving Speed Measuring Method Based on Image Perspective Distortion Correction
WANG Yan-hai1,WANG Xiao-man1,LI Yu-shan2,JING Wen-bo3,WANG Zi-he1
(1.School of Electronic and Information Engineering,Changchun University of Science and Technology,Changchun 130022,Jilin,China;2.Baicheng Ordnance Test Center of China,Baicheng 137001,Jilin,China;3.School of Opto-electronic Engineering,Changchun University of Science and Technology,Changchun 130022,Jilin,China)
A gun slaving speed measuring method based on image perspective distortion correction is proposed to solve the complicated operation and low measurement accuracy of traditional measuring method. In the proposed measuring method,a gun slaving speed measuring system composed of laser,target plate,CCD camera and computer is established.The CCD camera is responsible for real-time recording of positions of laser spot on the target plate.The gun slaving speed could be calculated according to the displacement and time of laser spot.Based on feature point imaging,a transformation matrix is built according to the perspective transformation principle,through which an image correction model is acquired,thus enabling to realize the perspective distortion correction of laser spot images on the target plate.Laser spot on the corrected image is extracted,and its barycenter is computed to get the displacement and time of the barycenter.The gun slaving speed is calculated.Experimental results show that the proposed measuring method has 10 times higher measuring accuracy of gun slaving speed than that of the traditional method.The method is applicable to range test and other measuring engineering of gun slaving speed.
ordnance science and technology;image processing;gun slaving speed;perspective transformation;distortion correction
TJ303+.9;TP391.41
A
1000-1093(2016)08-1517-07
10.3969/j.issn.1000-1093.2016.08.025
2015-12-15
武器装备预先研究项目(KYC-XZ-XM-2014-015)
王延海(1983—),男,博士研究生。E-mail:wyhyou@163.com;王晓曼(1956—),女,教授,博士生导师。E-mail:wmftys@126.com
