变速风力发电机组的变桨控制及载荷优化
2016-10-13刘军高璐
刘军, 高璐
(西安理工大学,陕西 西安 710048)
变速风力发电机组的变桨控制及载荷优化
刘军, 高璐
(西安理工大学,陕西 西安710048)
针对额定风速以上,如何抑制变速风力发电机组因反馈信号滞后引起的输出功率波动以及机组载荷等控制技术问题进行研究。在研究了传统变桨控制的基础上,提出基于风扰动的前馈补偿控制与传统PID反馈信号相结合的变桨控制策略。通过MATLAB环境下进行仿真研究,结果表明:桨控制策略能够快速使风力机的输出转矩保持在额定转矩附近,减小风机转速波动以及风电机组传动链扭振,从而降低风电机组承受的气动载荷使得系统运行更加平稳。
风力发电系统;最大风能跟踪;变桨距控制;载荷控制;前馈补偿控制
0 引 言
目前大型变速变桨风电机组通常采用PI控制器进行桨距控制。但由于额定风速以上到切出风速范围较大以及风速的随机性,使得输出转速的反馈信号滞后。在风速快速增加时,容易引起风力发电机组电机转速超调。而在风速突然下降时,又会引起转速的大幅下降,造成功率的大幅波动[1-2],所以仅采用PI反馈控制难以抑制输出功率波动。
针对PI变桨控制存在的不足,此次采用基于风扰动的前馈补偿控制对传统PI控制得到的参考桨距角进行在线补偿修正。当风速高于额定风速并发生突降时,前馈补偿控制器能够迅速减小桨距角的设定值,增加风轮吸收的风能。反之,控制器能够迅速加大桨距角设定值,增大桨距角,减小风能吸收,从而保证风轮转速能够快速稳定在额定值附近,降低发电机转矩波动,维持功率恒定。最后在MATLAB环境下进行仿真研究,验证了此次控制策略的可行性和有效性。
1 风力机变桨控制理论
1.1风力机气动特性分析
对于风电系统的机械部分,由空气动力学[3]可知,风力发电机组从风能捕获的气动功率P[4]为:
(1)
(2)
式中ρ为空气密度;R为叶轮旋转平面半径;v为风速;λ为叶尖速比;β为桨距角;ωr为叶轮转速;CP(λ,β)为风能利用系数,它是叶尖速比λ和桨距角β的函数[5]。
Cp(λ,β)=0.517 6(116λi-0.4β-5)e(-21λi)+0.006 8λ
(3)
(4)
根据式(3)(4)得到CP与λ,β关系,如图1所示。
从图1可以得出两点结论:(1) 当保持桨距角β不变时,存在一个对应着最大风能利用系数Cpmax的最佳尖速比λopt;(2) 对于确定的尖速比λ,风能利用系数在桨距角β=0°时相对最大,且随着桨距角β增大,风能利用系数明显减小。因此在风速高于额定风速时,可通过调节风力机桨距角从而改变发电机输出功率,使其稳定在额定功率附近[6]。

图1 风能利用系数与尖速比、桨距角之间的关系
由式(2)可知风轮转速或风速改变将引起叶尖速比变化[7],影响风能利用系数从而改变风轮捕获的机械功率,表达式为:
P=ωrTr
(5)
式中Tr为气动转矩[8],如式(6)所示。
(6)
式中CT为力矩系数。
1.2风力机变桨控制
变桨风力机组的桨距参考值一般是以电机转速作为控制桨距角的变量。发电机转速反馈信号和发电机转速给定值之间的误差作为PID控制器的输入,PID控制器给出桨距角参考值,控制结构如图2。
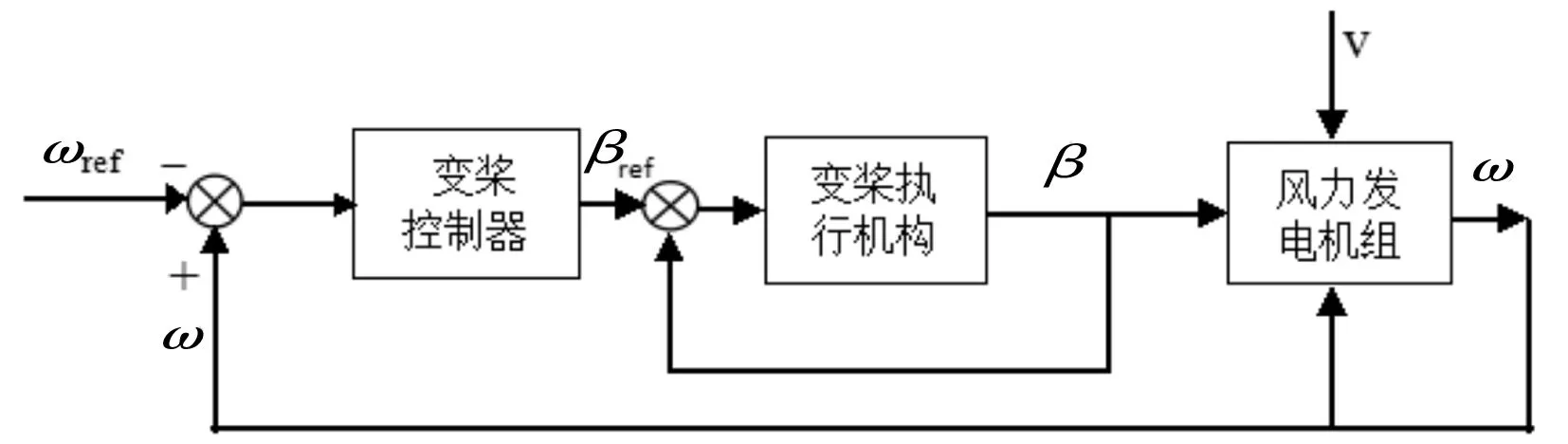
图2 桨距角控制结构图
图2中,βref为桨距角参考值,它通过变桨控制器得到。βref与实际桨距角β比较得到差值Δβ,然后通过变桨执行机构来改变桨距角β逐渐趋进于桨距角参考值βref。
1.3风力机传动系统模型
典型风力发电机组是由风轮、低速轴、齿轮箱、高速轴、发电机组成。在风力发电系统中,可将风力机带动发电机转动这一现象进行物理学模型抽象,将风力机和发电机等效为2个质量块[9],如图3所示。
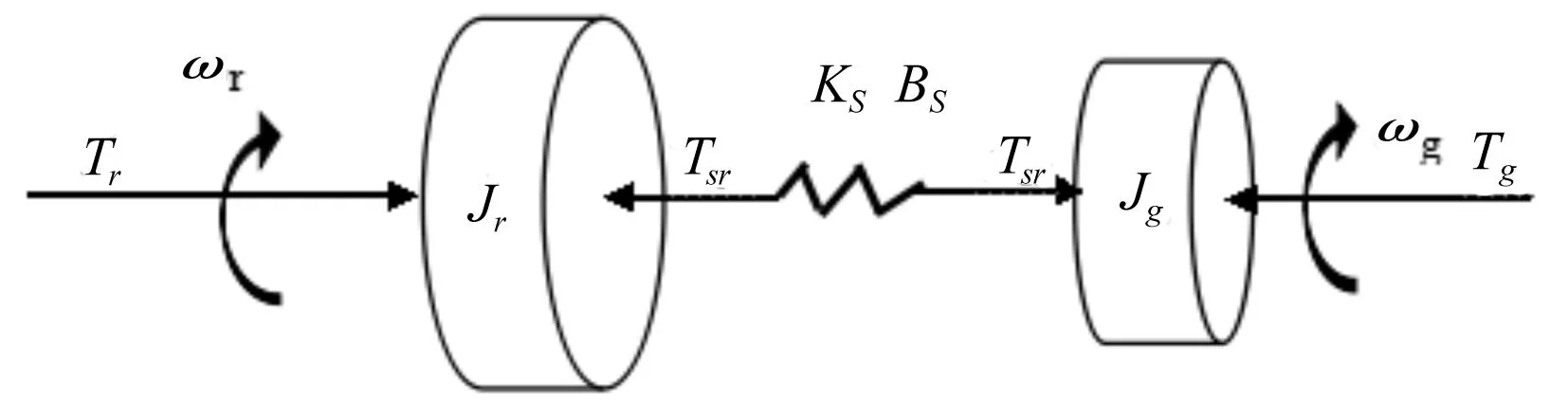
图3 传动链两质量块等效模型
传动链的气动方程为:

(7)
式中δ为机组传动轴扭转角度;ωr和ωg分别为风轮和发电机的转速;Ks为传动链等效刚性系数;Jr和Jg分别为风轮和电机的转动惯量;Bs为摩擦系数;Tg为发电机电磁转矩。
2 变桨控制器设计
变速变桨风力机组通过PI控制器给出桨距角参考值,但是由于桨距角的变化对于风速而言是非线性的,风力机的特性也会随着运行点的不同而发生变化[10]。当风速在额定值附近时,需要较大的PI控制器增益;而在高风速段时,较大的风速变化只需要一个较小的桨距角改变量就可以使输出功率稳定[11]。在风速高于额定风速时,以通过桨距角调整发电机转速为目标,建立传动链动力学方程:
(8)
式中Δω为风轮扰动转速;ωo为风轮额定转速;
此时发电机功率保持恒定,有:
(9)
假设恒功率区存在气动扭矩和叶轮转速的微小变化,对(9)进行泰勒级数展开得:
(10)
式中Δβ为桨距角在平衡点附近的变化量。
利用PID控制器,可得到其相对于转速偏差量的关系:
(11)
式中KP、KI、KD分别为桨距角控制器的比例、积分、微分增益。


(12)
上式(12)可以看作一个二阶系统,系统的频率ωn和阻尼ξ为:
(13)
设计桨距角控制器时。忽略其微分增益。仅仅考虑比例增益及积分增益给系统带来的影响,即取KD=0时,可得:
(14)
由式(14)可知,PI控制器增益与其功率对桨距角的微分有关,当风力机运行于不同风速时,其对应的桨距角不同,其微分值各异,该运行点处的控制器增益亦不同。
3 基于风扰动的前馈补偿控制器
基于以上分析可知,传统PI控制中固定增益不能满足在大范围风速变化下的转速控制。对于风速的突变,变桨控制器的相应速度不够迅速,控制功率输出效果并不理想。所以此次采用基于风扰动的前馈补偿控制对采用传统PID控制得到的参考桨距角进行在线补偿修正。在额定风速以上,根据风速实时变化量,计算出适配的桨距角修正量,与PID 控制器输出的桨距角相加,整体作为桨距角的设定值。图4为基于风扰动的前馈补偿变桨距控制框图。
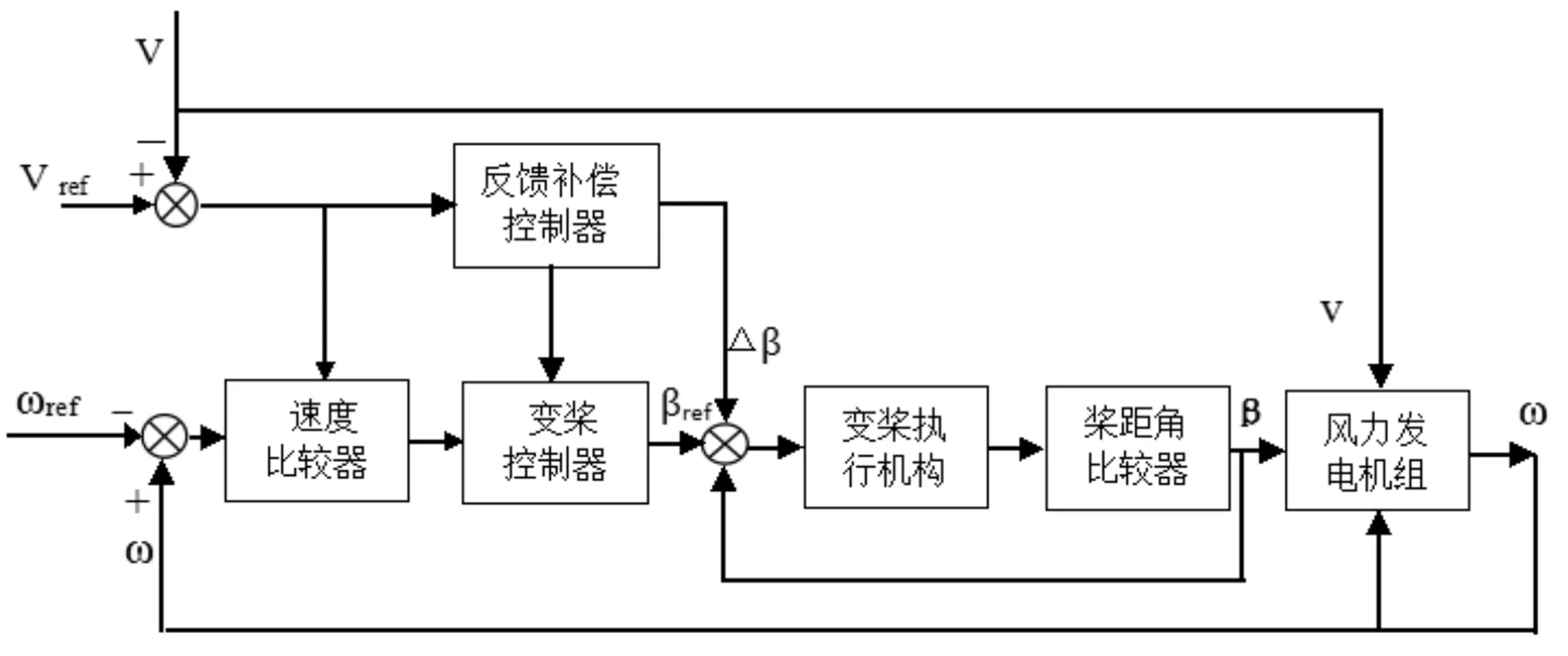
图4 前馈补偿变桨距加速度控制框图
对上式(9)其进行泰勒级数展开得:
(15)
式中Δv为风速扰动量;
将式(15)代入(8)中得:
(16)
在额定风速以上,当风力发电机组运行稳定时,转速增量Δω趋于0,此时可以得到在风力机稳定情况下桨距角增量与风速增量存在以下关系:
(17)

(18)
风力发电系统在风速发生突变时,桨距角变化响应速度慢于风速的变化,可以参照上式桨距角与风速的关系,根据风速的变化量给出合适的桨距角修正量。通过计算得到控制增益k,其值如表1所示。
当风速高于额定风速,突变增大时,通过前馈补偿控制得到桨距角补偿量Δβ,此时桨距角参考值:β*ref=βref+Δβ。桨距角的增大允许桨叶执行机构提前动作,减少风轮吸收的风能,使风机以稍低于电机额定转速的速度达到额定转矩,以防止功率超过额定值。当风速突降时,此时桨距角参考值:β*ref=βref-Δβ。由图1可知,此时风能利用系数增大,增加了风能吸收,减缓了由于风速突然下降引起的输出转矩突降,减少功率波动,使其维持额定值附近,同时减少了桨叶摆振载荷。
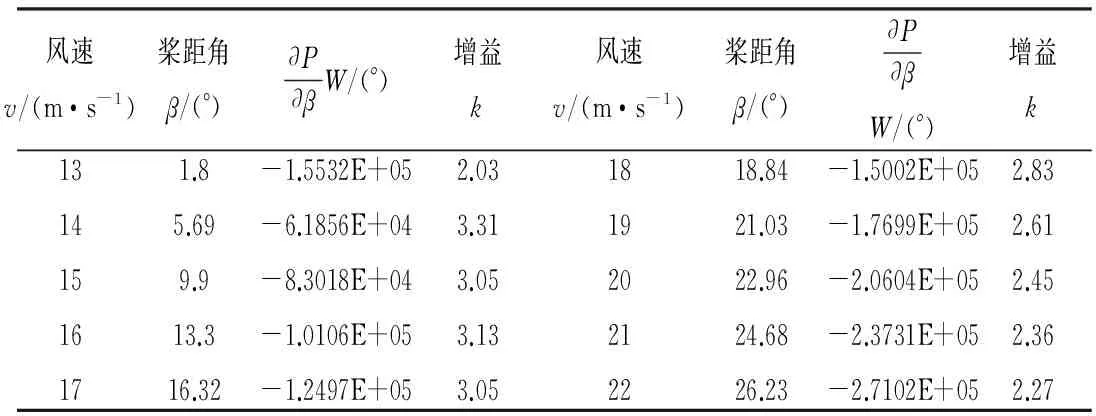
表1 控制增益k
(19)
4 变桨距仿真结果与分析
风力发电机组主要参数如下:额定功率为2 MW;额定风速为12 m/s;空气密度1.225 kg/m3;叶轮半径为35 m;风轮转动惯量为5 000 000 kg/m2,发电机转动惯量为20 kg/m2。在MATLAB仿真环境下对采用传统PI变桨距控制与基于风扰动的前馈补偿变桨距控制下的风力机系统仿真结果进行分析,其仿真结果如图(5~12)所示。
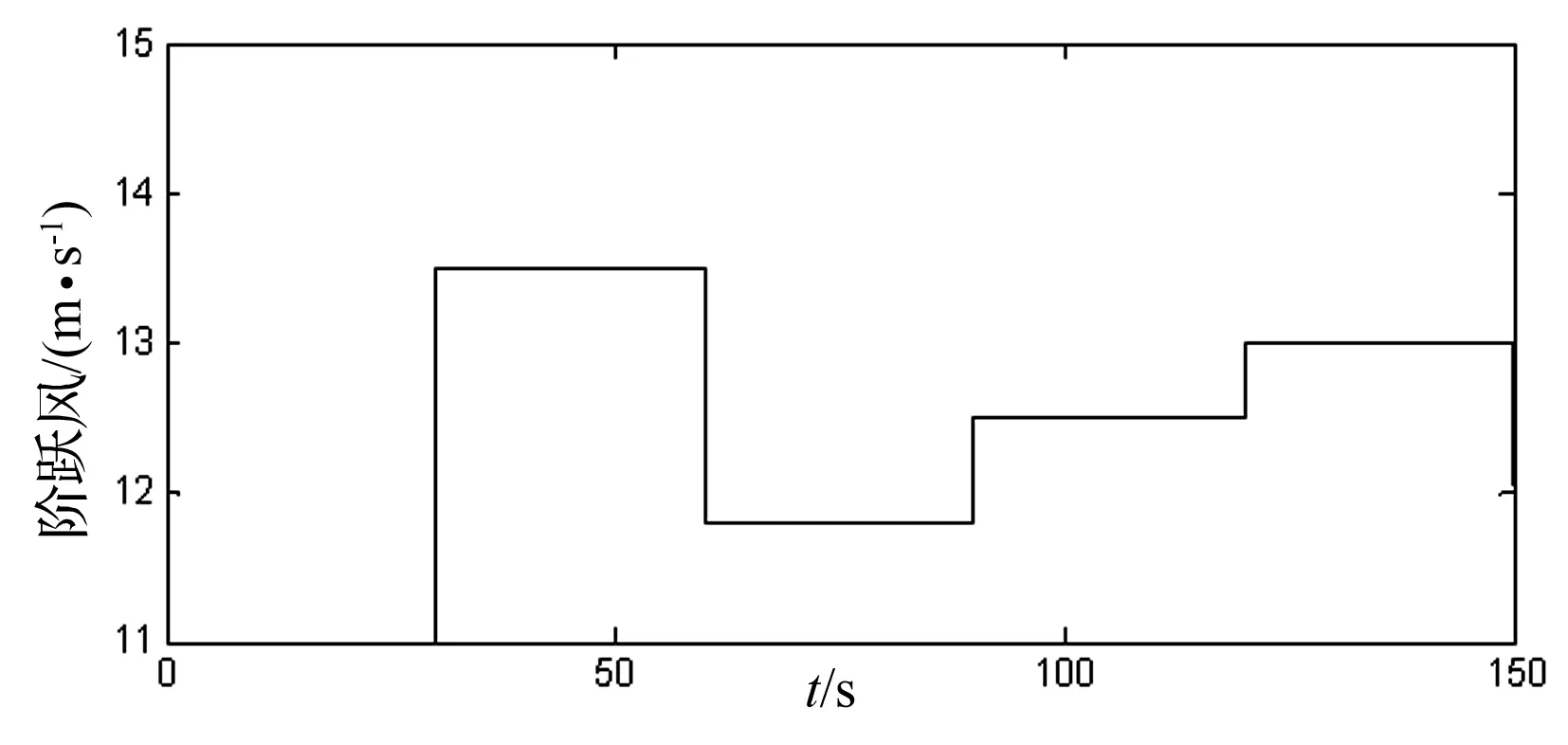
图5 阶跃风
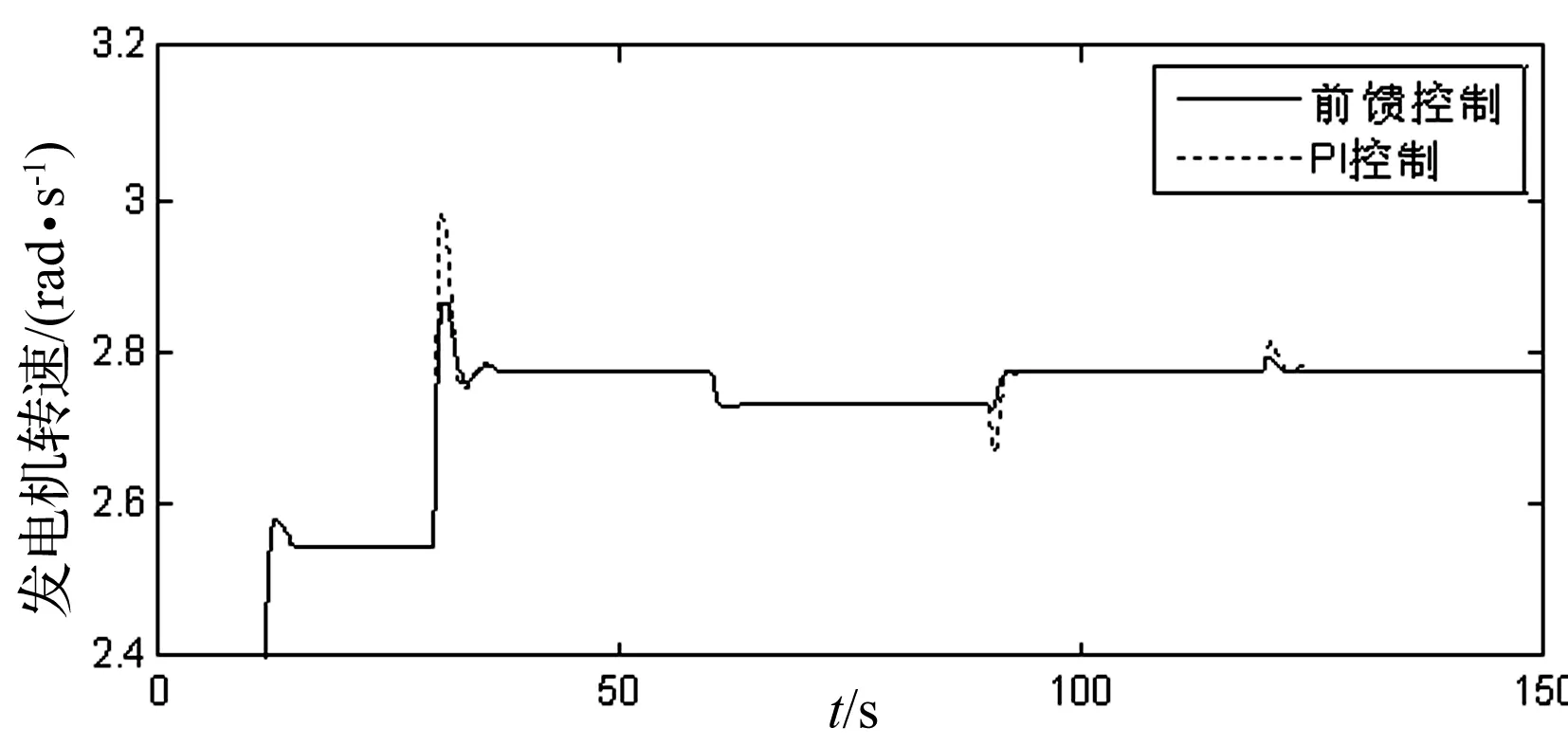
图6 发电机转速

图7 阶跃风下桨距角变化

图8 随机风
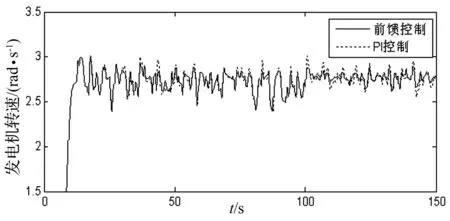
图10 发电机转速
从图6~7可以看出,通过前馈补偿控制,发电机转速波动明显减小,并且能够更快的跟踪额定转速。桨距的响应速度也有所提高,变化更加平滑,从而减少了桨距角频繁动作而引起的疲劳载荷。从图9~图11可以看出,当风速随机变化时,通过前馈补偿,发电机转速振动波动明显减小,发电机输出功率比较平滑,能够很好地稳定在额定范围内。
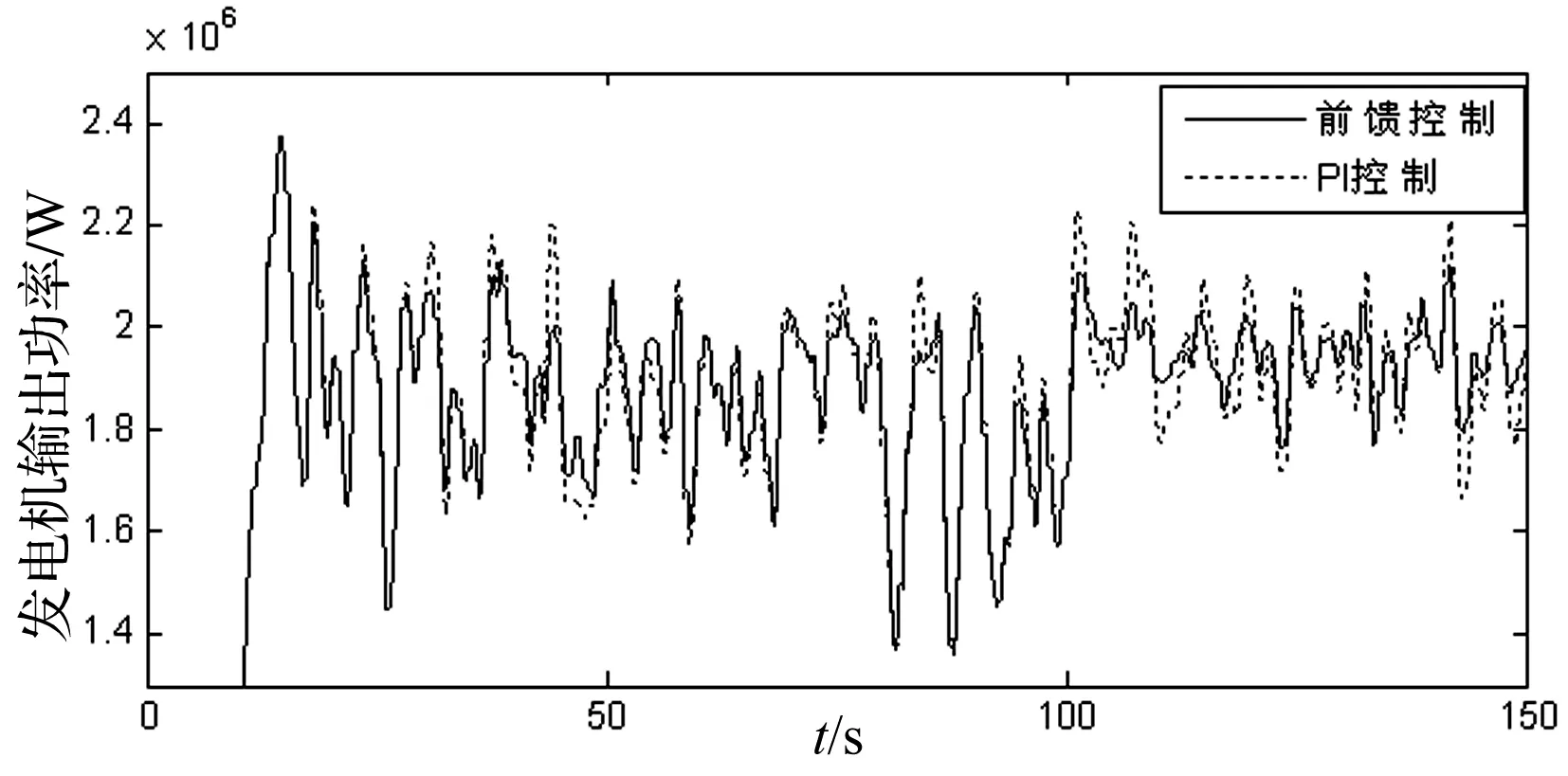
图11 发电机输出功率
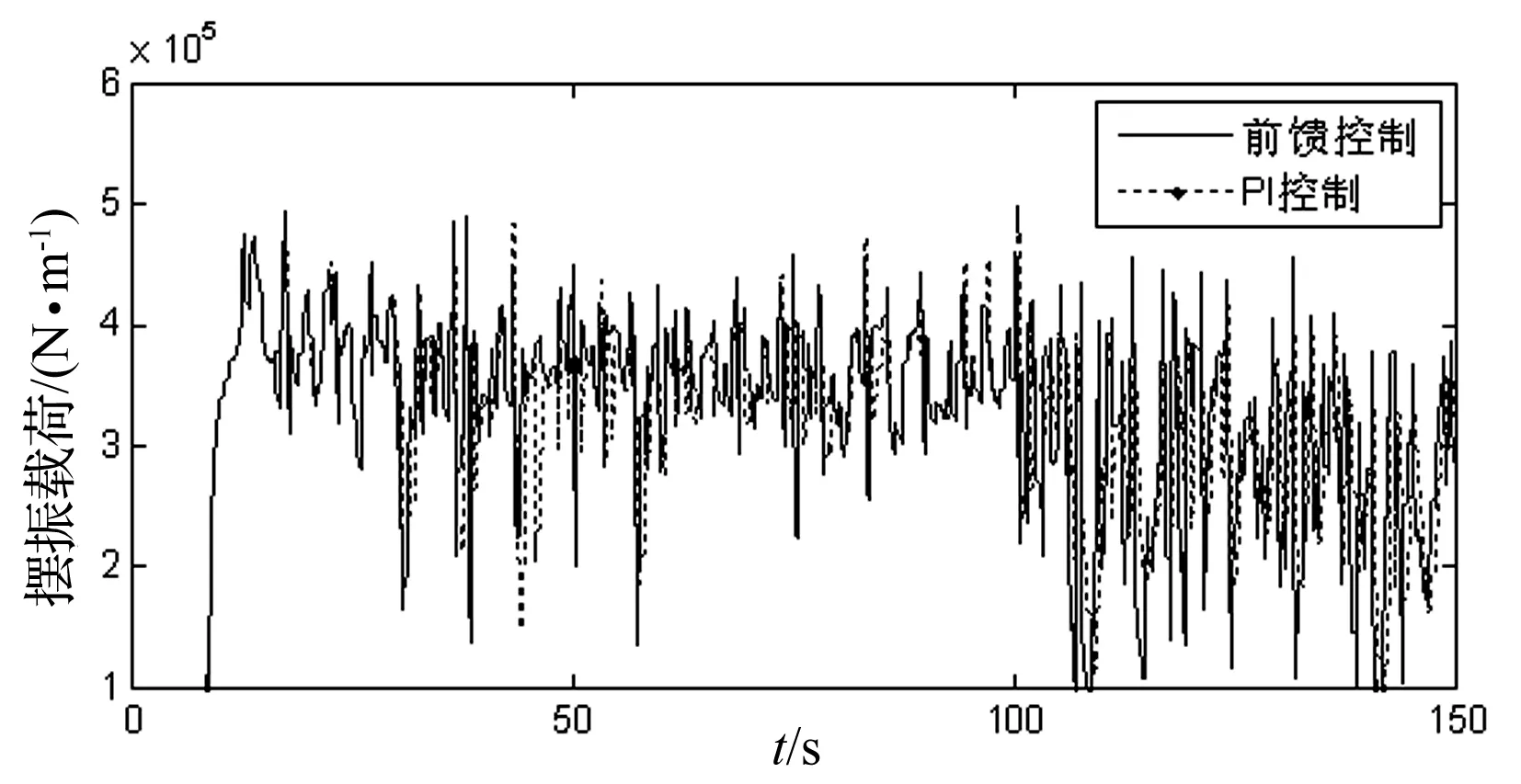
图12 叶片摆振载荷
根据数据分析可
知:传统PI变桨距控制后的摆振载荷平均值为3.150 5e+5(N·m),前馈补偿控制后的摆振载荷平均值为2.902 1e+5(N·m),说明前馈补偿控制后的摆振载荷明显降低。图12仿真结果表明,基于风扰动的前馈补偿控制能够有效减少桨叶受到的摆振载荷,从而也降低了桨叶的受力波动情况,增强了风机整体的稳定性和安全性。
5 结束语
通过对两种变桨距控制方法进行仿真对比研究,仿真结果表明:对于随机不稳定变化的风的影响,采用前馈补偿变桨距控制策略的风力机叶片所受的摆振载荷与疲劳损伤要小于采用传统变桨距控制策略的风力机。并且采用前馈补偿变桨距控制能够显著地减小了风力发电机转速的波动,有效抑制了传动链扭转载荷振动,减小机组的疲劳载荷损害,延长了整个机组的使用寿命。
[ 1 ] 马蕊,鄂春良,付勋波,等.兆瓦级变速恒频风电机组变速变桨距控制技术研究[J].电气传动,2010,40(4):7-10.
[ 2 ] VANDER HOOFT E L,SCHAAK P,VAN ENGELEN T G. Wind turbine control algorithms[R].Holland:Dutch Ministry of Economic Affairs,2003.
[ 3 ] 贺德馨.风工程与工业空气动力学[M].北京:国防工业出版社,2006.
[ 4 ] 宋新甫, 梁波. 基于模糊自适应PID 的风力发电系统变桨距控制[J].电力系统保护与控制, 2009, 37(16):50-53.
[ 5 ] 郭鹏. 模糊前馈与模糊PID结合的风力发电机组变速变桨距控制[J].中国电机工程学报,2010,30(8):123-128.
[ 6 ] 何玉林,苏东旭,黄帅,等.变速变桨风力发电机组的桨距控制及载荷优化[J].电力系统保护与控制,2011,39(16):95-99.
[ 7 ] 王文亮,葛宝明,毕大强.储能型直驱永磁同步风力发电控制系统[J]. 电力系统保护与控制,2010,38(14):43-48.
[ 8 ] 刘伟,沈宏,高立刚,等.无刷双馈风力发电机直接转矩控制系统研究 [J].电力系统保护与控制,2010,38(5):77-81.
[ 9 ] 陈家伟,陈杰,龚春英.永磁直驱风力发电系统气动载荷抑制策略[J].中国电机工程学报,2013,33(21):99-108.
[10] 任海军,何玉林,杜静,等.变速变桨距风力机功率控制策略[J].电网技术,2011,55(8):59-63.
[11] BIANCHI F D,SNCHEZ,PETA R S,et al.Gain scheduled control based on high fidelity local wind turbine models[J].Renewable Energy,2012,37(5):233-240.
Variable Pitch Control and Load Optimization for Variable Speed Wind Power Generation Systems
LIU Jun, GAO Lu
(Xi’an University of Technology, Xi’an Shaanxi 710048, China)
This paper discusses suppression of the output power fluctuation of the variable-speed wind power generation unit due to feed-back signal hysteresis occurring in case of wind velocity exceeding its rated value, as well as control technologies such as load of the machine group On the basis of a study on the traditional variable pitch control, it presents a variable pitch control strategy combining feed-forward compensation control based on wind disturbance and traditional PID feed-back signal. The result of simulation in the MATLAB environment shows that the designed variable pitch control strategy can quickly keep the output torque of the wind turbine in the vicinity of the rated torque, and reduce turbine speed fluctuations and torsional vibration of the drive chain of the wind turbine, thus lowering aerodynamic load of the turbine and ensuring more steady system operation.
wind power generation system; maximum wind power tracking; variable pitch control; load control; feed-forward compensation control
10.3969/j.issn.1000-3886.2016.01.015
TM315
A
1000-3886(2016)01-0044-04
刘军(1963-),男,陕西人,博士,教授,博士生导师,研究方向为风力发电系统。高璐(1989-),女,陕西人,硕士,研究方向为风力发电系统传动链载荷控制。
定稿日期: 2015-03-24