基于负载前馈及模糊控制的步进梁速度控制
2016-10-13鲁照权李平平俞越王渭华绘
鲁照权, 李平平, 俞越, 王渭, 华绘
(合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
基于负载前馈及模糊控制的步进梁速度控制
鲁照权, 李平平, 俞越, 王渭, 华绘
(合肥工业大学 电气与自动化工程学院,安徽 合肥230009)
步进梁由固定梁与移动梁组成,是步进式钢坯加热炉的核心部件。移动梁作矩形运动将钢坯在炉内加热的过程中逐步向前运送。移动梁必须轻托轻放钢坯,以免因频繁撞击而损坏移动梁与固定梁。移动梁自重加上一百多根钢坯的总重量达到数百吨,因此,步进梁运钢系统惯性巨大。在移动梁托起钢坯时发生阶跃式负载突变,造成速度和位移的大幅度跌落,并伴随着强烈抖动。在分析研究步进梁运钢系统的工作原理及数学模型的基础上,设计实现了基于负载扰动前馈的运钢速度模糊自整定PID控制。针对工程上负载无法测量问题,设计了构造负载扰动的状态观测器。仿真实验表明,控制方法能够使得系统运动准确快速地跟踪给定速度曲线。
钢坯加热炉;步进梁;大惯性;阶跃式负载突变;状态观测;前馈控制;模糊自整定PID
0 引 言
步进式加热炉由于其诸多优点正在逐步取代推钢式加热炉。步进梁是步进式加热炉的核心设备,由N+1根固定梁和N根移动梁组成[1-2],如图1所示。
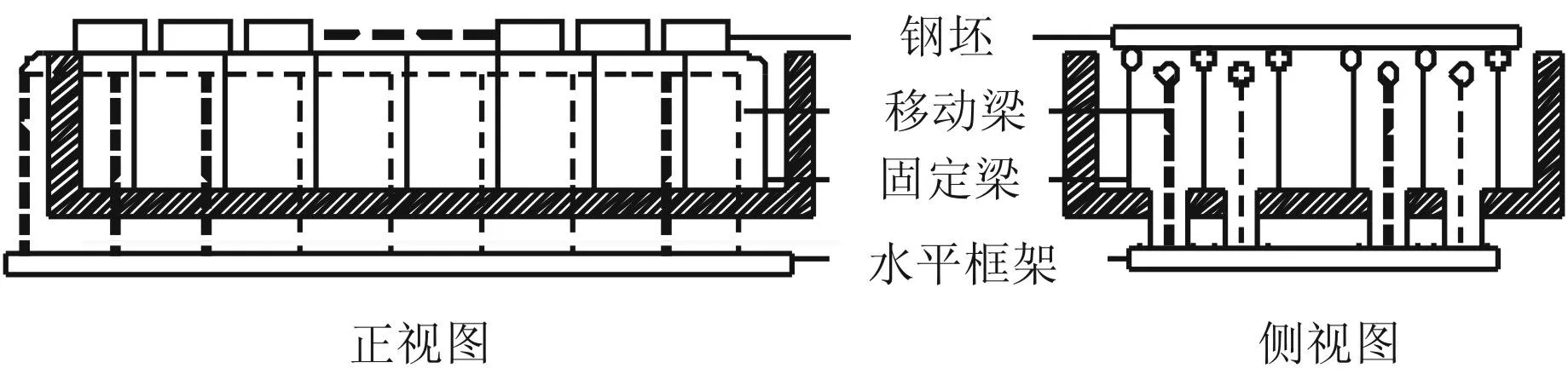
图1 步进梁结构示意图
移动梁通过在立面内做上升、前进、下降、后退四个基本动作将钢坯在炉内加热的过程中逐步向前运送。移动梁的运动速度不但要保证每根钢的生产周期和每步的位移精度,同时必须轻托轻放钢坯,以免因频繁撞击而损坏移动梁与固定梁。移动梁加上一百多根钢坯的总重量达到数百吨,因此,步进梁运钢系统惯性巨大。在上升、下降过程中,当移动梁起步或与固定梁等高时,负载产生阶跃式突变,造成速度和位移的大幅度跌落,并伴随着强烈抖动。
目前,在实际生产过程中,很难准确地控制步进梁的速度与位移,往往由于步进梁步进时的误差积累导致最后一步不能将钢坯准确地送到出炉悬臂辊上而中断生产[3-6]。
本文在分析研究步进梁运钢系统工作原理及数学模型的基础上,针对工程上负载无法测量问题,设计状态观测器构造负载扰动,实现负载扰动前馈控制;针对步进梁运钢系统具有非线性、大惯性、模型不确定性等特点,设计了运钢速度模糊自整定PID控制。仿真实验证明了基于负载扰动前馈的运钢速度模糊自整定PID控制的有效性。
1 步进梁运钢系统数学模型

图2 步进梁运钢系统机构示意图

图3 步进梁运钢系统结构示意图
步进梁运钢系统由非对称电液比例方向阀、非对称液压缸、双轮斜轨式步进机构、移动梁和固定梁等构成,系统机构如图2所示,系统结构如图3所示。
图3中θ为提升斜轨座倾斜角度,Xp为活塞位移,x为移动梁在水平面上的位移,y为移动梁在垂直面上的位移,Us为控制信号,Ps为供油压力,FL为外负载力,Xv为阀芯位移。
移动梁分上升、前进、下降、后退四个基本运动过程,这四个过程的数学模型结构相同。由于采用了非对称液压缸使得上升与下降、前进与后退时模型参数有些不同。在四个基本运动过程中,上升运动过程最难控制。
系统做上升运动时,系统特性方程如下:
负载流量线性化特性方程:
qL=KqsXv-KcsPL
(1)
非对称液压缸无杆腔流量方程:
非对称液压缸与负载力平衡方程:
(3)
将(1~3)式进行拉氏变换并联立得到系统做上升运动时的数学模型:
(4)
式中qL、PL分别为负载流量与负载压力,Kqs为流量增益,Kcs为流量压力系数,A1为无杆腔的面积,Vt1=V1/(1+η2V1/V2),Cps=Ci(1+4η2)/(1+4η3),Css=4Ciη2(η-1)/(1+4η3),Ci为液压缸内泄露系数,V1为液压缸无杆腔容积,βe为有效体积弹性模量,M为活塞及负载总质量,K为系统弹簧刚度[1]23[7]。
2 控制方案
当移动梁起步和上升到与固定梁持平托起钢坯时,负载均发生阶跃式变化,系统抖动很大,其速度有很大的跌落。针对这一严重问题,引入负载扰动前馈控制,快速消除速度的大幅度跌落。由于工程上难以对钢坯的重量进行测量,拟采用状态观测器对负载进行重构。针对步进梁运钢系统具有非线性、大惯性、不确定性等特点,设计运钢速度模糊自整定PID控制。控制系统结构如图6所示。
2.1前馈控制
为了消除负载FL的强烈扰动,引入前馈控制[8],并令
Xp/FL=WFL(s)+WFFC(s)W1(s)W2(s)=0
(5)
式中WFL(s)为负载扰动通道传递函数,WFFC(s)为前馈控制器传递函数,W1(s)为非对称电液比例方向阀传递函数,W2(s)为液压缸部分传递函数,得前馈控制器:
(6)
2.2负载扰动重构
每根钢坯重量2~3吨,满载时钢坯的数量1百多根。考虑到移动梁起步和托起钢坯时负载的阶跃式特点,负载扰动可描述为阶跃信号[9],即:
(7)
电液比例方向阀的传递函数为:
(8)
其中Kv、τv分别为电液比例方向阀的增益与时间常数。
假设Xv、PL是可测量的,选择Xp、V、PL、Xv、FL为状态量,输入量为Us、Ps,输出量Y为[XpVPLXv]T。V为移动梁运动速度,联立(1)、(2)、(3)、(7)、(8)式建立系统的状态空间方程如下:
(9)
(10)
系统满足可观测条件,故可建立降维状态观测器,重构负载扰动FL。
由(9)、(10)式可得:
A22=[0]G=[g1g2g3g4]
则负载扰动FL的降维状态观测器可表示为:
[(A22-GA12)G+A21-GA11]Y
(11)
(12)
则根据(11)、(12)式可得负载扰动FL的降维状态观测器为:
(13)

(14)
重构负载扰动 的降维状态观测器结构图如图4,其极点可由G=[g1g2g3g4]任意配置。从式(13)可以看出配置极点只与g2有关,与g1、g3、g4无关。为便于计算,可令g1=g3=g4=0,这样不仅大大减少了计算量,而且避免了Xv的不可测量性。降维状态观测器可简化为:
(15)
(16)
降维状态观测器结构图可简化为如图5。

图4 降维状态观测器结构
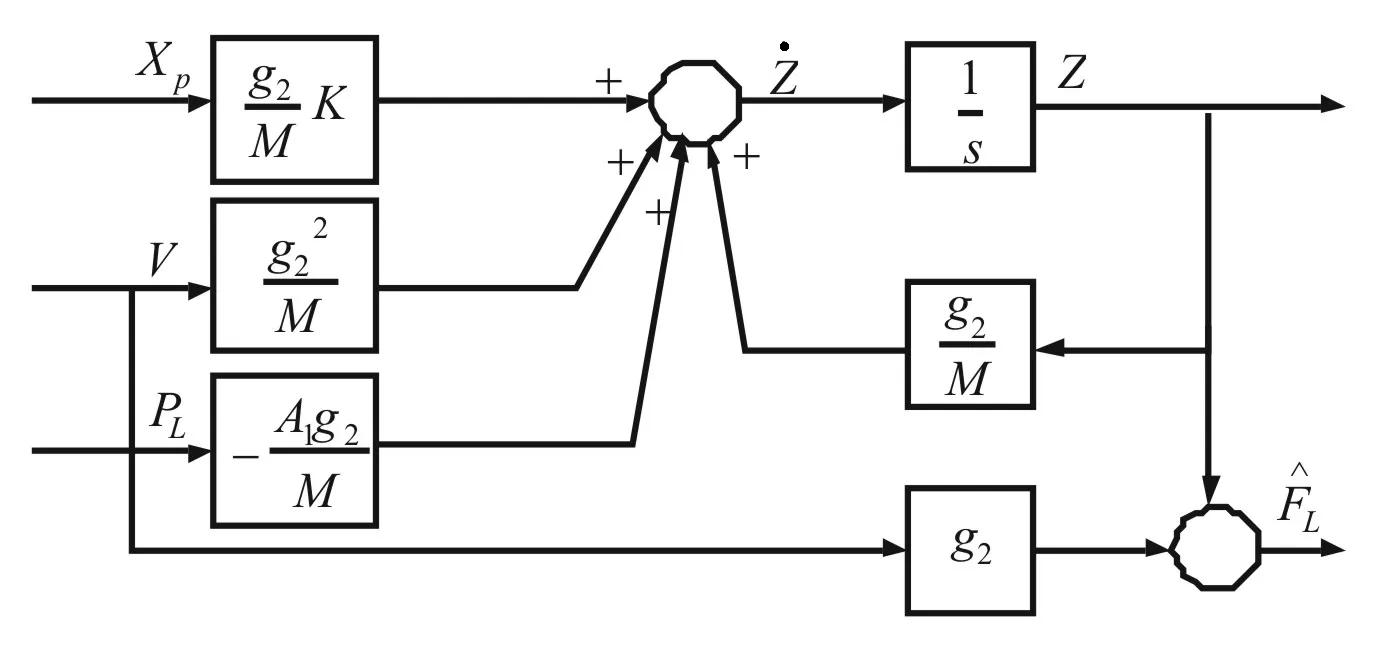
图5 降维状态观测器简化结构
2.3模糊自整定PID

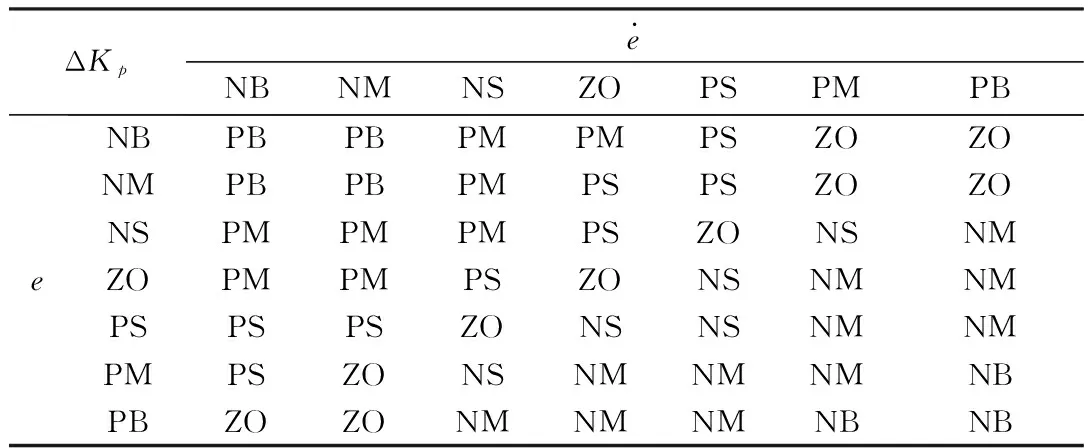
表1 ΔKp模糊控制规则

表2 ΔKp模糊控制规则
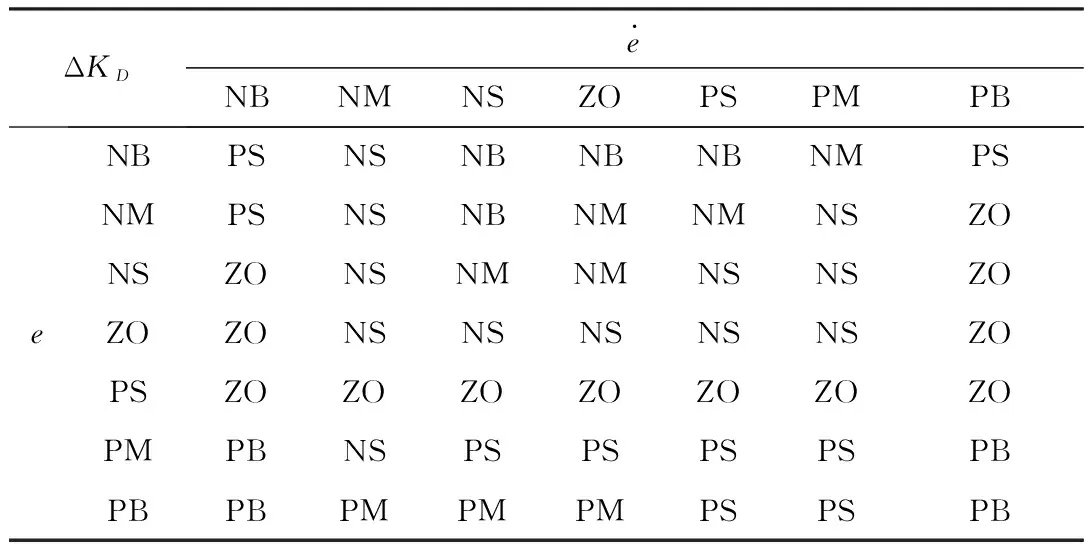
表3 ΔKD模糊控制规则

图6 基于负载前馈及模糊PID的步进梁速度控制系统
3 系统仿真与分析
3.1系统相关参数及计算
某加热炉步进梁运钢系统参数如下:
A1=0.061 6 m2,A2=0.030 1 m2,Vt1=1.96×10-2m3,Kv=1.0×10-3m/V,Css=-10-10m5/(N·s),τv=0.06 s,Kqs=1.09m2/s,K=800 N/m,Cps=4×10[-10]m5/(N·s),βe=6.9×108Pa,Kcs=2.73×10-9m5/(N·s),θ=17°,M=105kg 。
将参数带入(4)式后,得上升时系统的传递函数为:
(17)
由(6)、(17)得到加的前馈如下式:
WFFC(s)=2.54×10-8s2+3.22×10-6s+4.66×10-5
(18)
假设降维状态观测器的特征值为-3,得观测器的期望特征值多项式为:
f*=s+3
(19)
令sl-(A22-GA12)=f,则:
g2=-3M
(20)
则FL的降维状态观测器为:
3.2仿真图形及分析
采用降维状态观测器重构负载扰动与给定负载扰动对比仿真曲线如图7所示(曲线1是实际负载,曲线2是重构的负载),可见重构负载能够跟踪实际负载。
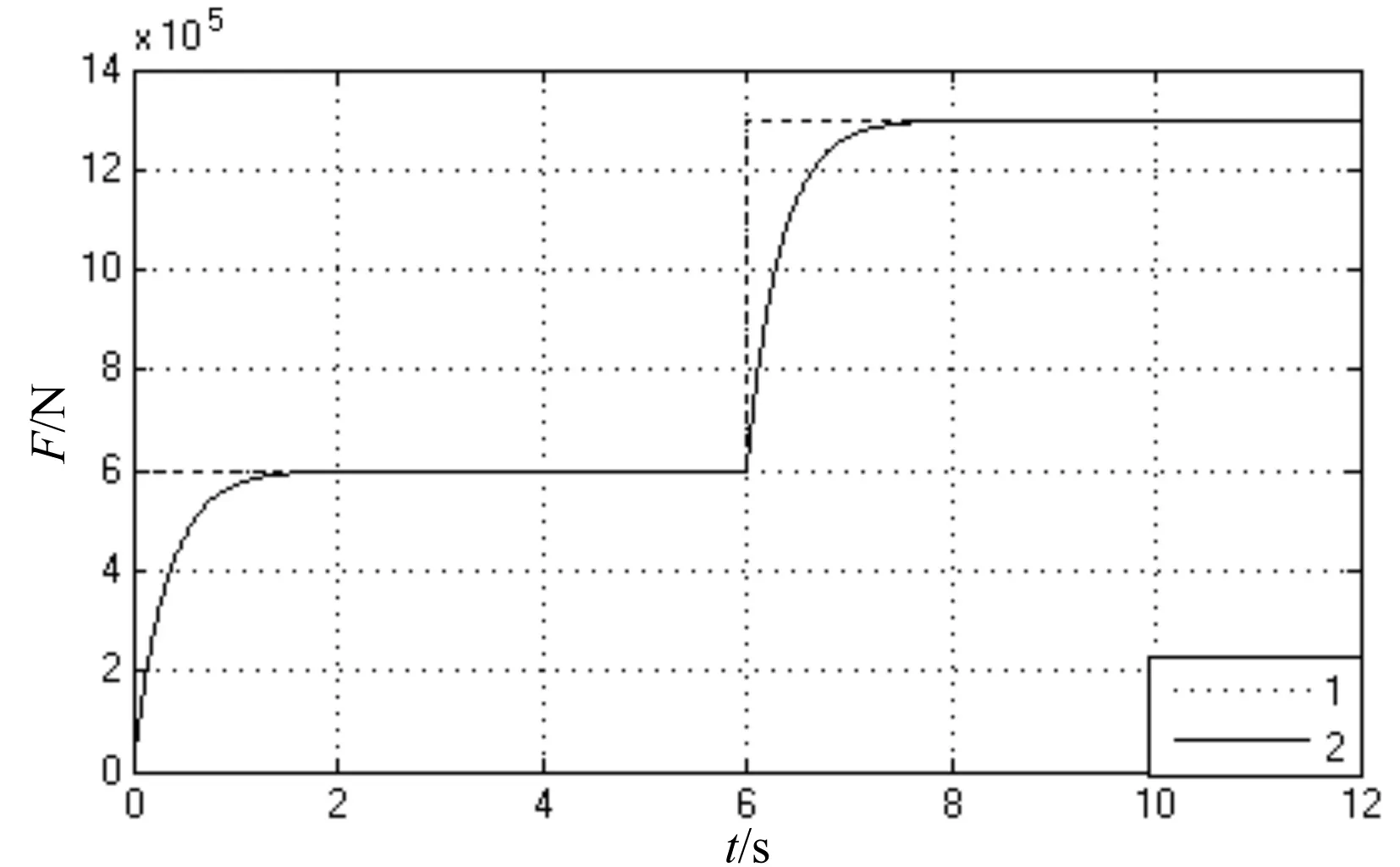
图7 重构负载与实际负载曲线
对步进梁运钢系统的速度分别采用PID控制、基于重构的负载扰动进行前馈补偿及PID控制和模糊自整定PID控制进行比较研究。
通过对控制器参数进行整定,得出PID控制器参数为P=500,I=7.2,D=0.001;基于重构的负载扰动前馈补偿及PID控制器参数为:P=1 200,I=8,D=0.06;基于负载扰动重构的前馈补偿及模糊自整定PID控制器参数为:量化因子ke=1,kec=0.004,比例因子 ,ku(ΔKp)=29 680,ku(ΔKI)=88 268,ku(ΔKD)=0.000 1,KI+=88 268,KD+=670。PID控制与基于负载扰动前馈补偿及PID控制仿真结果如图8所示。从图8中的仿真结果可以看出,步进梁开始上升和抬起钢坯时,系统均出现比较大的抖动,加上前馈补偿后系统跟踪速度提高了很多,抖动已大幅度消减。
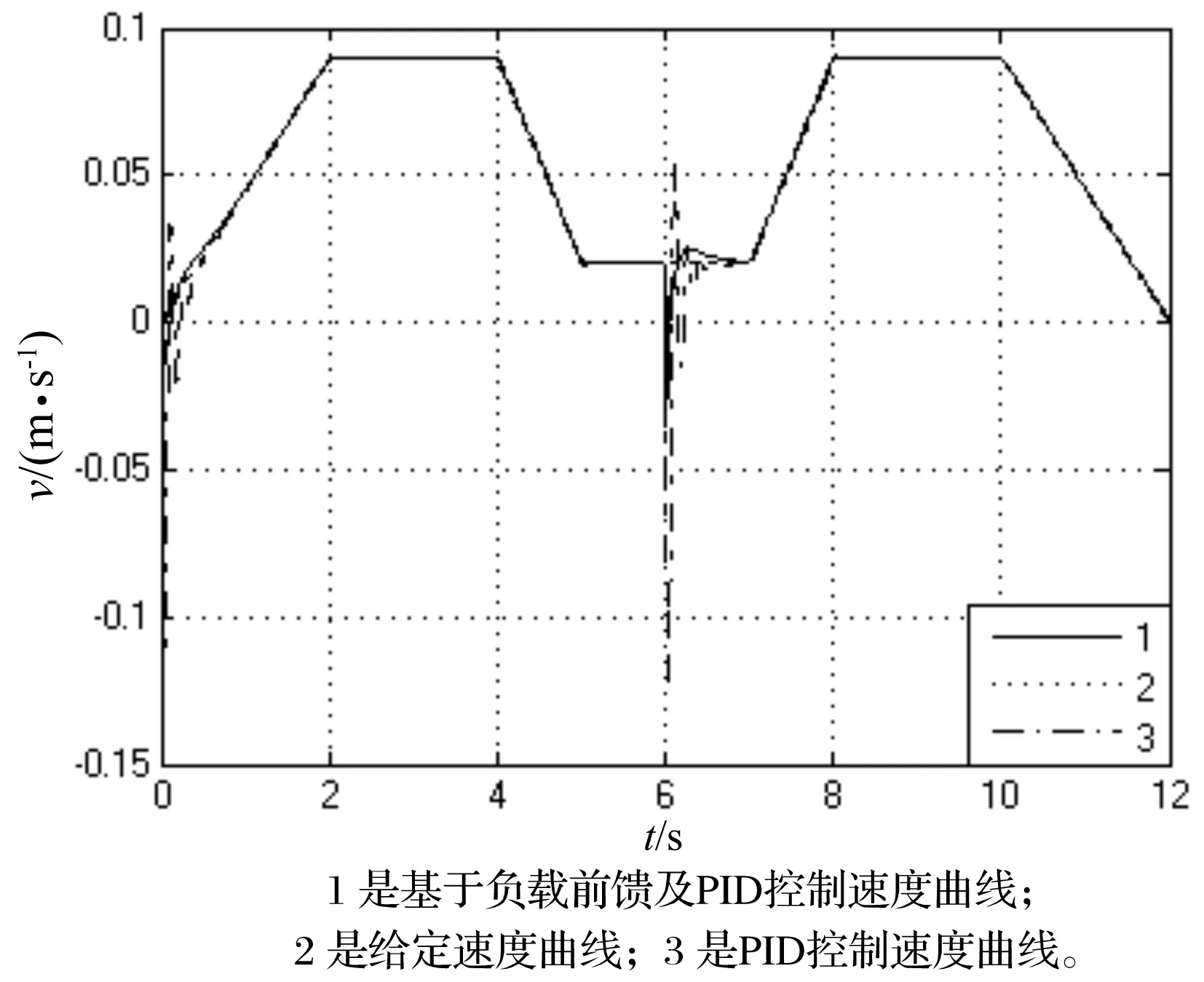
图8 PID控制与基于负载前馈及PID控制仿真对比图
基于负载扰动前馈补偿及PID控制器与基于负载扰动前馈补偿及模糊自整定PID控制器仿真结果如图9所示。从图9仿真结果看,基于负载扰动前馈补偿及模糊自整定PID控制能让系统快速准确地跟踪设定速度曲线,比基于负载扰动前馈补偿及PID控制更显优势。

图9 基于负载前馈及PID控制与基于负载前馈及模糊自整定PID控制仿真对比图
4 结束语
步进梁是步进式钢坯加热炉的核心部件。步进梁运钢系统具有非线性、大惯性、模型不确定性等特点。在移动梁起步和托起钢坯时系统出现抖动、位移和速度大幅度跌落等现象,传统的控制方法无法实现移动梁对钢坯的轻拿轻放和对位移和速度准确控制的要求。针对移动梁带载时出现抖动和速度、位移大幅度跌落问题,采用负载扰动前馈补偿;针对系统的非线性、大惯性和负载的不确定性采用模糊自整定PID控制;针对工程上负载难以测量设计降维状态观测器进行负载重构。仿真研究表明引入负载扰动前馈补偿后,可以大大改善速度跌落问题;模糊自整定PID控制的综合性能远远优于PID控制。
[ 1 ] 邹扬举.步进式加热炉电液控制系统分析与建模[D].合肥:合肥工业大学,2013.
[ 2 ] 杨茂平,戴红,蒋次强.融多项领先技术于一体的步进梁式加热炉[J].冶金动力,2009,17(6):86-90.
[ 3 ] 李芳,曾良才,罗国超,等.步进梁式加热炉速度控制系统研究[J].液压与气动,2004,33(3):16-19.
[ 4 ] 张雪峰.步进式轧钢加热炉步进梁的控制[J].工业炉,2014,33(3):25-27.
[ 5 ] 曾良才,陈奎生,湛从昌,等.步进梁加热炉速度智能控制技术研究[J].武汉科技大学学报:自然科学版,2008,31(1):23-27.
[ 6 ] 鲁照权,缪少军,朱敏,等.基于阀芯位移观测的步进梁速度闭环控制[J].合肥工业大学学报:自然科学版,2014,37(10):1177-1181.
[ 7 ] LIN BO-DONG, SI JING-REN. Research of synchronization control system based on electro-hydraulic proportional valve [C].International Conference on Computer Application and System Modeling,2010,10: 377-380.
[ 8 ] 郝双晖,蔡一,郑伟峰,等.基于前馈控制的交流伺服系统高速定位控制[J].微特电机,2010,38(2):35-40.
[ 9 ] 章玮,王伟颖.基于降阶负载扰动观测器的永磁同步电机控制[J].机电工程,2012,29(7):821-822.
[10] 林辉.轮毂电机驱动电动汽车联合制动的模糊自整定PID[D].吉林:吉林大学,2013.
[11] 李佳.模糊自整定PID控制在过热汽温控制系统中的研究与应用[D].哈尔滨:哈尔滨理工大学,2012.
Walking Beam Speed Control Based on Load Feed-forward and Fuzzy Control
LU Zhao-quan, LI Ping-ping, YU Yue, WANG Wei, HUA Hui
(School of Electrical Engineering and Automation, Hefei University of Technology, Hefei Anhui 230009, China)
The walking beam, composed of the fixed beam and moving beam, is the key component of the stepwise billet heating furnace. In the billet heating process, the moving beam moves in a rectangular way to move billets forward step by step in the furnace. The moving beam has to hold billets up and down lightly so as not to damage the moving beam and fixed beam through frequency impact. As the moving beam and over 100 billets weigh hundreds of tons, the transport system of the walking beam has a huge inertia. When holding up the billets, the moving beam undergoes step-like load mutation, resulting in a big drop of velocity and displacement, accompanied by a strong shake. Based on the analysis of the working principle and the mathematical model of the walking beam transport system, we have designed and realized fuzzy self-tuning PID control over the transport speed based on load disturbance feed-forward. Considering that load cannot be measured in engineering, we have designed a state observer for load disturbance. Simulation results show that this control method can enable the system movement to track the given velocity curve rapidly and accurately.
billet heating furnace; walking beam; great inertia; step-like load mutation; state observation; feed-forward control; fuzzy self-tuning PID
国家自然科学基金资助项目(60974022);合肥工业大学企业委托项目(105-432683/11-037)
10.3969/j.issn.1000-3886.2016.01.003
TP273.3
A
1000-3886(2016)01-0006-04
鲁照权(1962-),男,安徽庐江人,工学博士,合肥工业大学自动化系教授,研究方向:复杂系统与优化控制、工业过程自动化等。李平平(1988-),女,安徽庐江人,合肥工业大学自动化系控制工程硕士生,研究方向:复杂系统建模与控制。
定稿日期: 2015-04-02