带翼锥形空化器的流体动力特性分析
2016-10-13栗夫园党建军
栗夫园,党建军
(西北工业大学 航海学院,陕西 西安,710072)
带翼锥形空化器的流体动力特性分析
栗夫园,党建军
(西北工业大学 航海学院,陕西 西安,710072)
为了获得锥形空化器带有翼时受到的流体动力,通过数值仿真计算,得到了带不同翼时锥形空化器各部分的流体动力。对计算得到的数据进行了分析,得到了锥形空化器上翼的阻力和升力随攻角的变化特性,以及翼的楔角、形状、空化器锥角对流体动力的影响。利用仿真数据验证了在流体动力计算中楔角与攻角之间的等量变换关系。仿真结果表明,锥形空化器上安装合适尺寸的翼时,能够有效提高水下航行器的控制力而不增加航行器阻力。
水下航行器;锥形空化器;流体动力;翼
0 引言
超空泡航行器作为水下航行器的一个重要发展方向,受到了各个国家的密切关注。空化器作为超空泡航行器重要的部件之一,对航行器的空化和控制都有着重要的影响[1-2]。常用的圆盘空化器和锥形空化器都已有较多研究。相比于圆盘空化器,锥形空化器由于其自身的特性,可以在空化器的锥部安装声呐来实现自导,因此锥形空化器相比于圆盘空化器有其优势[3],德国的“梭鱼”鱼雷上采用的就是锥形空化器。由于锥形空化器在航行过程中的升力系数在不同空化器锥角下相差较大,一般在相同攻角时会小于圆盘空化器,甚至接近于零[4],因此会在锥形空化器上安装对称三角翼来增加升力[3]。国外对此研究相对较为成熟,有较为丰富的试验和理论研究。近年来,国内对于锥形空化器的流体动力研究越来越多,周景军研究了攻角对锥形空化器空泡形态的影响[5],黄小腾对锥形空化器的非定常特性进行了研究[6],张马骏对锥形空化器的出水特性进行了仿真研究[7]。但是对于带翼锥形空化器的流体动力研究尚处于空白。而由于空化器上的翼在运动过程中也会产生空化现象,会产生与全沾湿的翼不同的特性。总的来说,国内目前的公开资料中,尚没有发现与此相关的研究。因此,研究带翼锥形空化器上翼的流体动力特性十分必要。
数值仿真对超空泡研究是一种较为方便可靠的方式,且相关技术已经较为成熟,各国对超空泡相关问题的研究有许多都采用了数值计算的方式,其中包括对圆盘空化器[8-11]和锥形空化器[12-14]相关的数值计算。文章通过对带翼的锥形空化器进行一系列的数值计算,得到了几种翼型的流体动力,并总结了锥形空化器上翼的流体动力特性。
1 计算模型
文中采用Fluent软件对空化器受力情况进行模拟。在国外可以找到的资料中,可知其相关试验中的翼型如图 1所示[3],但试验中仅测试了带翼空化器的整体受力情况,而没有将翼的受力提取出来。以此为参考,设计了A,B,C 3种三角翼(横截面为三角形),安装在锥形空化器上,每种翼型如图2所示。仿真计算中圆锥底径D=20 mm,上游入口及边界为速度入口,距离圆锥 40D,下游为压力出口,距离圆锥 80D。各翼型的计算模型部分尺寸如图3所示。

图1 国外相关试验资料中翼的外形Fig.1 Shapes of fins in foreign literature

图2 数值计算中的3种翼型示意图Fig.2 Three fin shapes in simulation
文中选择的锥形空化器的锥角为 40°,因为40°锥角的空化器其升力系数位置导数与圆盘空化器的升力系数位置导数大小接近,方向相反[3],与常见的圆盘空化器对比更为直观。后文中未注明空化器锥角处均表明锥角为40°。此外,文中还计算了90°锥角空化器的一组翼,以便与40°锥角空化器的翼进行对比,从而得到空化器锥角对翼的影响。

图3 3种翼型的尺寸Fig.3 Sizes of three fins
在仿真中,根据计算模型的对称性,选择模型的一半进行计算以减小网格数量。通过采用分块非均布结构化网格来提高模型附近的网格密度。计算时,通过网格自适应来改变网格密度,使不同网格密度下的仿真结果差别小于0.5%来保证结果的网格无关性。最终选择的网格数量为62万。
为了得到更好的空泡特性,在仿真中将0°攻角时入口速度设置为轴向 100 m/s,通过改变入口水流方向来模拟空化器锥角的变化。湍流强度为 0.5%,湍流粘性比为 5,出口压力的表压设置为50 000 Pa,水的饱和蒸汽压依据软件中给出的空化模型,设置为3 540 Pa。由空化数计算公式,文中选择的自然空化数σv=0.029 6。
2 数值计算结果与分析
文中对带翼的锥形空化器进行了数值计算,分别计算了每种翼型在3°,6°,9°,12°共4种楔角,0°,1°,2°,4°,6°,8°,10°共7种攻角的情况下所受到的流体动力情况。
为了验证仿真计算的准确性,首先对文献[3]中的 B型翼,按照试验模型尺寸进行仿真,并且使空化数与试验保持一致。计算得到的B型翼的空泡外形如图4所示。与试验资料中的空泡外形对比发现,在翼的后部形成的空泡与整体空泡相互作用,表现出来的特性基本一致。带翼与不带翼锥形空化器的空泡形态的区别主要在于空化器的翼所形成的空泡。翼形成的空泡部分随着离空化器的距离增加而渐渐变的不明显直至消失。仿真计算得出的锥形空化器的升力结果与国外试验结果的对比如图5所示。
由图5可以看出,采用文中的仿真方法得到的结果与试验结果有较好的一致性,在其试验达到的最大攻角9°时,空化器升力系数的试验值与数值仿真结果的误差约为10%。考虑到试验精度与数值仿真的精度,文中数值仿真方法可靠,得到的结果是精确的。

图 4 数值计算得到的空泡外形和国外试验资料中的空泡外形Fig.4 Cavity shapes from simulation and foreign literature

图5 数值计算得到的升力系数与国外试验结果对比Fig.5 Lift coefficient comparison between simulation and foreign literature
2.13种翼型下不同楔角时的阻力
文中计算得到的流体动力以阻力系数和升力系数的形式表示,其特征面积为锥形空化器的底面面积。由于锥形空化器的流体动力特性已经有相应的研究,文中将锥形空化器上翼的流体动力单独提取出来分析。
对各型翼进行数值计算得到的阻力在不同攻角和楔角下的结果如图6和图7所示。从图6可以看出,在攻角较小时,阻力系数随攻角的变化也较小,而在攻角较大时,阻力随攻角的变化较为明显。3种翼的阻力随攻角变化趋势基本相同。不同楔角对于阻力的影响基本上相差一个定值。
与文献[4]中研究的锥形空化器的阻力系数相比,翼的阻力系数非常小,可以忽略不计。
2.23种翼型不同楔角时的升力特性
对各型翼进行数值计算得到的压力分布图和升力在不同攻角和楔角下的结果如图8和图9所示。图8中的翼依次为3°楔角A型翼,3°楔角B型翼,12°楔角B型翼,3°楔角C型翼。
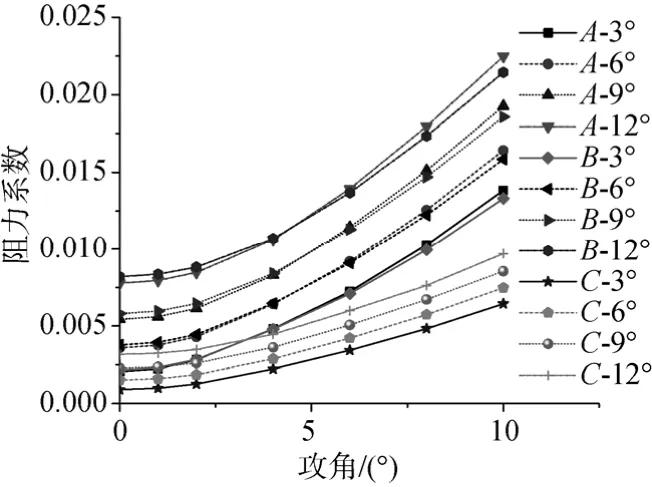
图6 不同翼的阻力系数与攻角的关系Fig.6 Relations between drag coefficient and angle of attack for different fins
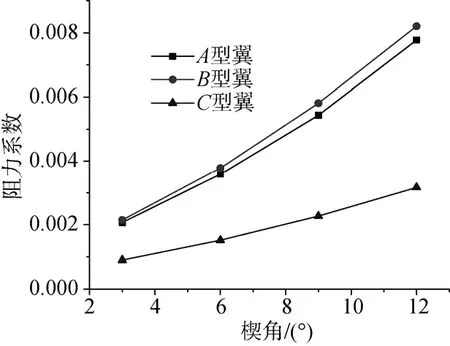
图7 0°攻角时阻力系数与楔角的关系Fig.7 Relation between drag coefficient and wedge angle at 0° angle of attack

图8 10°攻角时不同翼的压力分布Fig.8 Pressure distributions of different fins with 10° angle of attack

图9 不同翼的升力系数与攻角的关系Fig.9 Relations between lift coefficient and angle of attack for different fins
升力系数在攻角较小时与攻角的关系可看作是通过原点的线性关系;在达到一定值后,线性关系转变为非线性关系;而超过一定值之后,升力系数与攻角又重新变为线性关系,此时线性关系的斜率与小攻角时相比变小。引起这种变化的原因,是当攻角较小时,翼的两侧表面处于完全沾湿状态,阻力不会随攻角发生剧烈变化;当攻角达到一定值时,翼的背流面一侧开始发生空化,不同攻角下的空化程度不同,从而造成升力与攻角的非线性关系;攻角超过一定值时,翼的背流面完全被空泡覆盖,达到稳定状态,此时升力与攻角又在一定范围内重新呈现出线性关系。这是与无空化现象产生的翼不同的地方。
楔角的影响在攻角较大时才有明显的差别,这是因为在0°攻角的情况下,不同楔角的翼受到的升力都为零。在小攻角情况下,翼面处于全沾湿状态,不同楔角下同一型翼的升力几乎相同;攻角为10°的情况下,A型翼3°楔角比12°楔角的升力小15.2%,B型翼3°楔角比12°楔角的升力小14.6%,C型翼3°楔角比12°楔角的升力小11.2%。
对于锥形空化器上的翼,需要翼的阻力小而能够提供的升力相对要大。把 B型翼空化器锥部的阻力和升力与翼的阻力和升力提取出来,对比如图10所示。从对比中可以看到,与锥部的阻力相比,翼的阻力非常小,几乎可以忽略;与此同时,翼的升力相对于锥部的升力是占有一定比重的,能够提升空化器的升力特性。由此说明,翼的存在能够在阻力增加不大的情况下显著增加升力。
2.3翼的楔角与攻角在流体动力计算中的转换关系
如图11所示,对于翼型A,当12°楔角的翼与3°楔角的翼的迎流面重合时,2种翼其对称面之间的夹角即两者攻角的差为4.5°,而此时两者的背流面都是在空泡的包裹之下。由于水的密度是空气密度的800多倍,因此,背流面受到的气体产生的流体动力与迎流面受到的流体动力相比可以忽略。从理论上讲,此时2种翼的受力相差不大。A型翼在背流面完全空化后,楔角不同造成的影响在理论上相当于大楔角的翼型比小楔角的翼型增加了一定角度。

图10 锥部与翼的流体动力对比Fig.10 Comparison of hydrodynamics between cone and fin
设2个翼的楔角分别为a和b,a≥b,则可以得出两者在迎流面重合时攻角差为


图11 A型翼不同楔角状态Fig.11 Different wedge angles of fin model A
利用式(1)可以得到12°楔角的翼与9°楔角的翼攻角差为1.5°,12°楔角的翼与6°楔角的翼的攻角差为3°。
通过对数值计算结果中空泡的形态进行分析发现,当翼的攻角为6°时,翼的背流面处的空泡与大攻角时的空泡相同,即背流面空泡已经相对攻角稳定。对9°,6°,3°楔角的翼进行插值计算其分别在7.5°,9°,10.5°攻角时的阻力,与12°楔角的翼在6°攻角时的阻力系数相比较,结果见表1。

表1 转换算法与实际误差Table 1 Error between conversion algorithm result and real data
差别最大的12°楔角与3°楔角的翼阻力系数转换后仅相差 5.66%。可见,在背流面被空泡包裹时,计算流体动力时将楔角的差别转换为攻角的差别,基本上可以得到正确的结果。
2.4锥角对翼流体动力特性的影响
通过对90°锥角的锥形空化器带B型翼的情况进行数值计算,得到了40°锥角与90°锥角上B型翼的流体动力对比,如图12所示。

图12 40°与90°锥角空化器的B型翼流体动力对比Fig.12 Comparison of hydrodynamics of fin model B between 40° and 90° cone cavitators
从图12可以看出,锥角的大小对翼的受力有着显著的影响。40°锥角空化器上的翼在攻角超过一定值时,升力系数增速变缓,90°锥角空化器的翼在10°攻角内升力与攻角呈线性关系。在角度较小时,40°锥角空化器的翼所提供的升力略高于90°空化器的翼;在超过一定攻角时,90°空化器的翼提供的升力反而更高。
锥角的不同造成翼的迎流角不同,自然会影响到其受力,这是翼的升力在线性变化时大小不同的原因。而从仿真中翼上的空化情况可以发现,90°锥形空化器的翼与40°锥形空化器的翼在相同攻角下的空化状态不同: 40°锥形空化器的翼在6°攻角时背流面已经被空泡包裹,而90°锥形空化器的翼在此时并没有在背流面产生空化现象,而是在12°攻角的时候才被空泡包裹。这是在不同锥面上的翼升力产生非线性变化所处攻角不同的直观原因。可见,空化器上的翼在不同锥角的空化器上,产生空化时的攻角不同。
3 结论
锥形空化器的翼是提升锥形空化器升力的重要部件,其特性直接影响着超空泡航行器的稳定性与机动性。归纳文中研究结果,带翼锥形空化器的流体动力特性主要有以下几点。
1) 锥形空化器上翼的阻力相对于锥部的流体动力是小量,而翼上的升力与锥部的升力是同一量级。因此锥形空化器上安装翼对空化器阻力影响很小却能显著影响升力。带翼的锥形空化器其性能将优于不带翼的锥形空化器。
2) 如果翼的背流面已经空化,那么翼的楔角与攻角之间存在一定的近似关系,在粗略计算时可以相互转化。翼的背流面完全空化后,升力与攻角在一定角度内存在线性关系。
3) 锥角的不同会影响翼受到的流体动力,更会影响到翼的空化。大锥角空化器上翼的空化出现时间相对较晚。由于空化现象的存在,在未出现空化时升力与攻角接近于线性关系,空化过程中出现变化,空化后又出现新的近似线性关系。
文中研究内容主要针对翼所受到的流体动力,对于翼形成的空泡对整体空泡形态的影响没有进行研究。不同锥角下,对翼形成空化时的攻角也需要更深入的研究。
[1] Kirschner I N,Uhlman J S,Perkins J.Overview of High-speed Supercavitating Vehicle Control[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.Colorado: AIAA,2006.
[2] Jiang Z Y,Xiang M,Lin M D,et al.Research on Hydrodynamic Properties of Annular Cavitator with Water Injection[J].Journal of Experimental Biology,2012,19(4): 11-15.
[3] Kuklinski R,Fredette A,Henoch C,et al.Experimental Studies in the Control of Cavitating Bodies[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.Colorado: AIAA,2006.
[4] 栗夫园,张宇文,党建军,等.锥形空化器流体动力特性研究[J].兵工学报,2014,35(7): 1040-1044.Li Fu-yuan,Zhang Yu-wen,Dang Jian-jun,et al.Research on Hydrodynamic Characteristics of Conical Cavitator[J].Acta Armamentarii,2014,35(7): 1040-1044.
[5] 周景军,于开平.空化器倾斜角对超空泡流影响的三维数值仿真研究[J].船舶力学,2011,15(1): 74-80.Zhou Jing-jun,Yu Kai-ping.Three Dimensional Numerical Simulation on the Influence of Cavitator Inclination Angle to Supercavity Flow[J].Journal of Ship Mechanics,2011,15(1): 74-80.
[6] 黄小腾.锥形空化器航行体非定常流体动力特性研究[D].哈尔滨: 哈尔滨工业大学,2012.
[7] 张马骏,陈鑫,鲁传敬.锥头航行体非匀速垂直出水数值研究[J].水动力学研究与进展,2014,29(6): 683-690.Zhang Ma-jun,Chen Xin,Lu Chuan-jing.Numerical Study of the Submerged Body with a Conical Head Exiting from Water Vertically in Non-uniform Velocity[J].Chinese Journal of Hydrodynamics,2014,29(6): 683-690.
[8] Amin R,Ehsan R,Mohammad J M.Numerical Simulation of 3-D Cavitation Behind a Disk Cavitator Using Open FOAM[C]//The 12th Iranian Aerospace Society Conference.Iran: Amir Kabir University of Technology,2013.
[9] Wang Zou,Yu Kai-ping,Arndt R.Modeling and Simulations of Supercavitating Vehicle with Planning Force in the Longitudinal Plane[J].Applied Mathematical Modelling,2015,39(19): 6008-6020.
[10] Kwack Y K,Sung H K.Numerical Analysis for Supercavitating Flows Around Axisymmetric Cavitators[J].International Journal of Naval Architecture and Ocean Engineering,2013,5(3): 325-332.
[11] Hu Z M,Khoo B C,Zheng J G.The Simulation of Unsteady Cavitating Flows with External Perturbations[J].Computers & Fluids,2013,77(1): 112-124.
[12] Sunho P,Rhee S H.Numerical Analysis of Two-dimensional Turbulent Super-cavitating Flow Around a Cavitator Geometry[C]//AIAA Computational Fluid Dynamics Conference.Hawaii: AIAA,2011.
[13] Kwack Y K,Ko S H,Jung J H,et al.Numerical Analysis for Supercavitating Flows Around Axisymmetric Cavitators[J].International Journal of Naval Architecture and Ocean Engineering,2013,5(3): 325-332.
[14] Salari M,Farhat S,Javadpoour S M.Experimental and Numerical Study of the Characteristics of Supercavities Developed Behind Conical Cavitators[J].Modares Mechanical Engineering,2014,13(13): 226-236.
(责任编辑: 陈曦)
Hydrodynamic Characteristics of Conical Cavitator with Fins
LI Fu-yuan,DANG Jian-jun
(School of Marine Science and Technology,Northwestern Polytechnical University,Xi′an 710072,China)
To explore the hydrodynamics of a conical cavitator with fins,numerical simulation is performed to obtain the hydrodynamics of a conical cavitator with different fins.The obtained simulation data are analyzed,and the variations of drag and lift forces on the conical cavitator with the angle of attack,as well as the influences of the wedge angle,shape of fin,and cone angle of cavitator on the hydrodynamics,are achieved.The conversion formula between wedge angle and attack angle is verified with the simulation data.Simulation results show that the conical cavitator with proper fins can improve the control force without increasing the drag to an underwater vehicle.
underwater vehicle;conical cavitator;hydrodynamics;fin
TJ630.1;O352
A
1673-1948(2016)03-0172-05
10.11993/j.issn.1673-1948.2016.03.003
2016-04-05;
2016-04-18.
国家重点基础研究资助项目(A2720060294);西北工业大学基础研究基金资助项目(JC20110209).
栗夫园(1988-),男,在读博士,主要从事超空泡航行器流体动力与总体技术研究.