基于超短基线的AUV自主对接流程及算法
2016-10-13赵朝闻
赵朝闻,张 淞,李 辉
(1.中国船舶重工集团公司 第705研究所昆明分部,云南 昆明,650118;2.武警后勤学院 建筑工程系,天津,300162)
基于超短基线的AUV自主对接流程及算法
赵朝闻1,张淞2,李 辉1
(1.中国船舶重工集团公司 第705研究所昆明分部,云南 昆明,650118;2.武警后勤学院 建筑工程系,天津,300162)
自主式水下航行器(AUV)自身携带能源有限,需要在完成一段任务后自主航行至水下基站与其对接。文中分析了目前对接基站的现状,针对包容式基站,在分析对接工作原理的基础上,提出了一种基于超短基线信息的对接流程: 首先根据导引信息和到对接基站的距离不同,将 AUV自主对接分为远程、中程、近程和末程 4个阶段;其次详细分析了每个阶段的工作特点、对接流程和控制算法;最后通过在 VS2008中的数学仿真和搭载AUV开展湖上试验,验证了对接流程和控制算法的可行性。仿真和试验结果均表明,该AUV自主对接控制流程和算法稳定可靠,具有良好的工程应用前景。
自主式水下航行器(AUV);对接流程;对接算法;超短基线(USBL);水下基站
0 引言
自主式水下航行器(autonomous underwater vehicle,AUV)作为人类搜索海洋的工具,在海洋工程领域的作用越来越重要,但是由于其自身携带能源有限,在完成一段任务后,需要回收至基站进行数据回放、能源补充及任务更新。由于AUV的回收与再次布放需要相当长的时间,同时存在一定的风险,科学家研究出了水下基站,由AUV自主航行与水下基站对接,以提高AUV的工作效率和水下作业时间,同时降低风险。
根据对接方式的不同,目前水下对接系统主要分为3类,分别是捕捉式对接、平台式对接和包容式对接[1-4](见图 1)。捕捉式对接对航行器结构要求比较高(需要安装捕捉器),同时对航行器性能有影响;平台式对接在回收过程中,由于AUV与回收平台的几何尺寸差异,AUV会受到回收平台的干扰作用,干扰力受 AUV运动流场边界的形状、自身运动姿态、相对平台方位和距离的影响,所以干扰力的复杂性对 AUV影响较大;相对于捕捉式和平台式对接,包容式对接方式系统结构简单、对AUV改造较小,得到了较多应用,其典型代表为 Woods Hole研究所的 REMUS AUV水下对接系统[1]。该系统采用渐缩型入口装置导引 AUV进入对接位置,并采用线性执行器引导水密电连接器进行拔插实现能源补充和数据传输。
国内现有的某型水下基站采用包容式对接方式,在其圆柱段对接筒上安装了超短基线(ultra-short baseline,USBL)接收与发射装置(见图2),通过接收AUV端发射的声信号来计算AUV的位置信息。针对此,文中提出了一种基于超短基线信息的用于 AUV自主航行与水下基站对接的航行控制流程及算法。根据导引信息和到对接基站的距离不同,将自主对接分为远程、中程、近程和末程4个阶段,并详细研究了4个阶段的对接流程和控制算法。通过在 VS2008中的数学仿真和搭载AUV开展湖上试验,验证了对接流程和控制算法的可行性。
1 系统工作原理
1.1对接算法的输入信息
AUV要准确地进入对接基站,必须要知道基站的位置信息,对于包容式对接方式位置信息包含两方面的内容,一是基站的绝对位置信息,主要指基站的经度、纬度、深度、高度及开口方向等,如图 3(a)、(b)、(c);二是基站的相对位置信息,主要指基站的相对水平方位角、水平距离、垂直方位角及垂直距离等。其中绝对位置信息可以通过设定的方式存储在 AUV端,相对位置信息则需要在 AUV运动过程中实时解算,由于硬件性能限制,目前AUV不具备解算能力,需要由基站端解算相对位置信息后通过水声通信的方式告知AUV,如图3(d)所示。

图1 3种水下对接方式Fig.1 Three modes of underwater abutting joint

图2 带USBL的包容式对接示意图Fig.2 Schematic of subsumption abutting joint with ultra-short baseline
其中相关信息定义如下。
水平方位角: 以基站开口中心线为 180°,逆时针方向为正,顺时针方向为负,范围为0 (不包括)到360° (包括);
距离: AUV当前经纬度与基站经纬度两点间的空间距离;
垂直方位角: 以基站开口中心线为90°,向上为正,向下为负,范围为0 (不包括)到180° (包括)。
基站的绝对位置信息在 AUV入水前,通过预设定的方式设定至AUV,并由AUV存储待用。相对位置信息由对接基站根据 AUV发射的声脉冲信号计算。
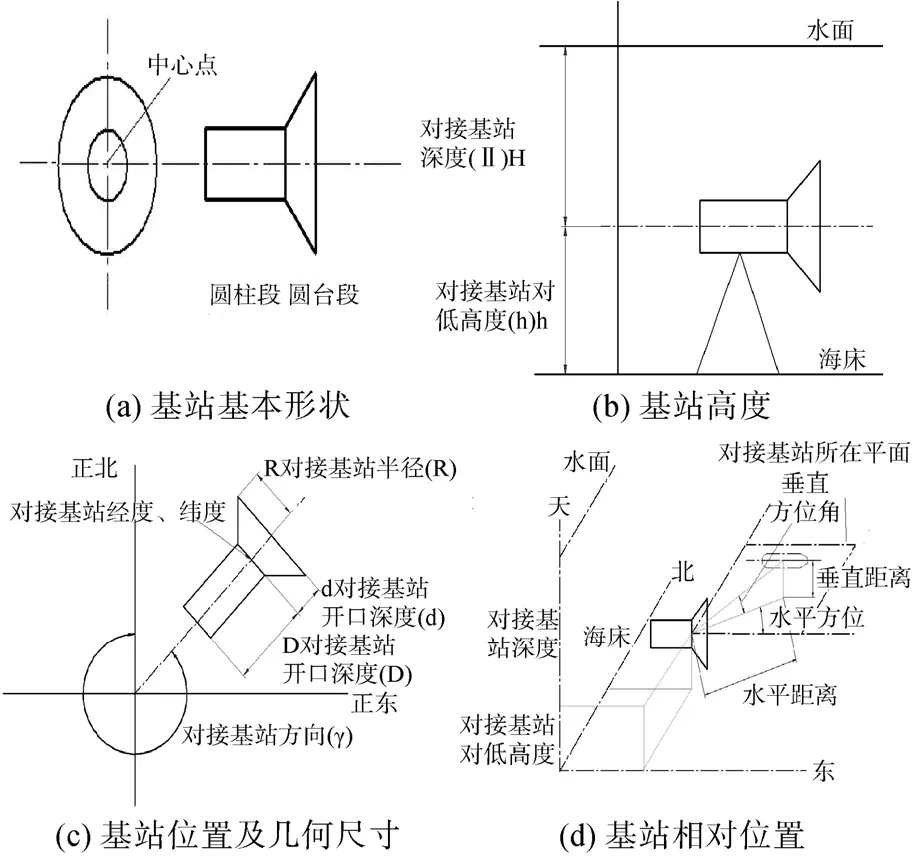
图3 对接基站位置关系图Fig.3 Position relationship of abutting joint base station
1.2AUV与基站的USBL通信
AUV在到达基站位置附近后,通过 USBL与基站进行5 s一次的周期性通信,由AUV端发射呼叫脉冲信号,基站端接收到该信号时,根据接收信号的换能器位置,计算出 AUV的水平方位角、垂直方位角,并以脉冲信号的方式向外辐射,AUV接收到辐射信号时,根据发射与接收的时间差及当地声速计算距离,最后将水平方位角、垂直方位角、距离等信息打包发送至AUV任务管理系统[5-7]。
1.3AUV运动原理
AUV任务管理系统收到USBL信息后,通过一定的控制算法生成航行控制命令(水平面控制方式及垂直面控制方式)和动力命令,并发送至AUV控制系统和动力系统,操控AUV运动。
文中研究的内容就是任务管理系统根据USBL信息生成航行控制命令的流程和算法。
2 自主对接算法
2.1对接阶段划分
AUV完成前序任务,开始水下对接任务时,根据到对接基站的距离和对接输入信息的不同,将AUV水下对接过程分为远、中、近、末4个阶段: 第1阶段为远程搜索阶段,目的是寻找USBL信号、接收到有效的USBL信号修正导航信息;第2阶段为中程寻点阶段,目的是依据对接基站的绝对位置控制 AUV航行至基站开口方向的中心线上;第 3阶段为近程导引阶段,目的是依据对接基站的相对位置微调AUV姿态,使AUV沿基站开口方向前行;第 4阶段为末程对接阶段,目的是依据接驳装置的定位信息,保持直航,直至对接完成或对接失败。
阶段划分示意如图4所示,其中远程搜索阶段为A点及A点至B点阶段,距离约300 m;中程寻点阶段为B点至E点,距离约300 m;近程导引阶段为E点至F点,距离约180 m;末程对接阶段为F点至基站,距离约20 m。

图4 对接各阶段示意图Fig.4 Schematic of various phases in abutting joint process
2.2远程搜索算法
远程搜索的主要任务是 AUV完成前序任务后,自主航行至A点寻找USBL信号,由于AUV完全依靠自身惯导系统航行,完成前序任务后AUV的推算位置与实际位置存在一定的误差,其算法流程如图5所示。寻找A点时到达就位点A′(由于误差引起的位置偏差点)。此时,若能接收到 USBL信号,则用 USBL信息修正惯导误差;若不能接收到USBL信号,则在A点的北、西、南、东方向100 m处旋回航行搜索USBL信号,直至接收到USBL信号修正惯导误差;若始终未接收到USBL信号,则认为对接失败。惯导误差的修正算法为,已知对接基站的绝对位置 O′点经纬度: Long_JZ,Lat_JZ;对接基站的安装角度γ (正北为0°,逆时针旋转为正,范围0~360°)。

图5 远程搜索阶段算法流程图Fig.5 Algorithm flow chart of long-range search phase
根据USBL信号计算,已知AUV相对对接基站的水平方位角α及AUV到对接基站的距离L。则,经USBL修正后的AUV经纬度为


图6 中程寻点阶段算法流程图Fig.6 Algorithm flow chart of middle-range search phase
2.3中程寻点算法
AUV收到有效的 USBL信号后,对导航信息进行修正。在对接基站中心延长线500 m,400 m,300 m,200 m处分别设置4个航向调整点,由AUV自主计算航向调整点位置,并采用寻点控制方式依次经过4个航向调整点,经调整后航线与对接基站中心延长线平行,其算法流程如图6所示。
2.4近程导引算法
AUV通过航向调整点后,航线与基站中心延长线基本平行,此时 AUV采取双平面控制方法,在垂直面采取定对底高度控制方法保证AUV与基站在同一水平面上;在水平面采用双层控制结构,外层控制保证 AUV在基站中心延长线附近航行,内层控制保证AUV航向与基站中心延长线平行。
在近程导引阶段,AUV按5 s一次的周期向基站获取USBL相对位置信息,根据水平方位角做外层控制,当α >180,左转 180-α;当α<180,右转α-180。同时根据接收次数做内层控制,每收到3次USBL信息,做1次内层控制,保持AUV航向为基站开口方向减180°,如此循环。
2.5末程对接算法
当AUV距离对接基站20 m时,不再对航行进行调整,保持当前航向直航,至距离对接基站5 m时动力停车,靠近自身惯性进入基站。若检测到水平方位角小于 90°或大于 180°时,认为对接失败,重新回到A点再次开始对接流程。
3 仿真及试验结果
文中以某型水下自主航行器为背景,以AUV运动方程为控制模型,用VS2008软件进行了仿真,对提出的 AUV自主对接流程和控制算法进行了模拟计算。
3.1远程及中程阶段仿真
理想状态下在对接基站中心延长线800 m处设置一个对接就位点,作为对接任务起点A,AUV结束前序任务后,到达A点。由于AUV导航信息误差,当AUV认为到达对接任务起点A时,实际位置是 A′点在以 A 点为圆心,误差距离为半径(假设200 m)的圆内散布,由于A′点在USBL作用距离外或AUV没有正对基站,AUV无法收到USBL信号。此时AUV以3°/s右旋一周,试图寻找USBL信号,若未找到则分别到A点以北100 m、西100 m、南100 m、东100 m处以3°/s右旋一周,若仍未找到USBL信号,则对接任务失败,结束任务(如图7所示)。
3.2近程导引试验
搭载某型自主式水下航行器开展了相关的湖试工作,对近程导引算法进行验证试验。试验过程中,对接基站端USBL由母船吊放入水下10 m,开口方向为东偏南2°,AUV在水下10 m深度航行,2 850 s后按文中提出的导引算法自主解算航行,考虑到AUV及基站的安全,在AUV距离基站300 m时强制结束导引阶段,AUV转向避让基站,试验结果见图8。

图7 远程及中程仿真轨迹Fig.7 Simulation tracks of long-range and middle-range phases
图8(a)表示AUV根据USBL信息计算的导引控制命令,可以看出控制命令是以每15 s进行进行1次内层控制,即控制AUV向基站开口方向调整,基站开口方向为东偏南2°,AUV航向控制命令为88° (AUV航向以正北为0)。在每2次内层之间有2次外层控制,即根据AUV偏离基站中心线的角度,见图8(c),控制AUV向基站中心线运动,控制流程完全正确。
图8(b)反映了AUV经过调整后的实际航向实时变化趋势: 2 850 s开始控制,2 910 s超调达到最大,到3 000 s时航向基本趋于稳定,在88°附近。从图8(a)和图8(c)中也可以看出,3 000~3 150 s,AUV基本在基站中心线航行。3 150 s后,按照试验预案,AUV结束了近程导引阶段,转向航行。图8(d)表示在整个导引过程中,AUV到对接基站的距离,可以看出AUV离基站越来越近,是符合试验预期的。

图8 近程导引试验结果Fig.8 Experiment results of short-rang guidance
综合图8各图,可以看出AUV按文中提出的近程导引流程和控制算法,水平方位角及实际航向偏差在1°以内,考虑到对接基站是喇叭口形状,是可以满足对接使用要求的。
4 结束语
文章主要概述了 AUV水下对接中的流程和算法问题。根据对接要求,将对接阶段分为远程、中程、近程和末程 4个阶段,并分别介绍了各阶段的流程和算法,进行了仿真。
远程阶段的任务是到达指定区域,AUV推算自身位置,获取 USBL信息以修正惯导误差,最终确定实际位置;中程阶段是为辅助近程阶段而设计的,需要完成对接前的路径规划,设置航向调整点对 AUV进行多次航向调整;近程阶段AUV采取双平面控制方法,对收到的USBL信号周期内做3次外层控制,1次内层控制;末程阶段保持直航,若对接失败则重复整个对接流程。
经过仿真和实航验证,该对接流程能平稳可靠地实现AUV的水下对接,可进一步用于AUV的联合海试。
[1] 燕奎臣,吴利红.AUV水下对接关键技术研究[J].机器人,2007,29(3): 267-273.Yan Kui-chen,Wu Li-hong.A Survey on the Key Technologies for Underwater AUV Docking[J].Robot,2007,29(3): 267-273.
[2] 吴利红,许文海,王利鹏.AUV水下终端对接目标识别与定位技术[J].大连海事大学学报,2007,40(2): 81-85.Wu Li-hong,Xu Wen-hai,Wang Li-peng.Dock Position and Pose Estimation Algorithm for AUV Underwater Terminal Docking[J].Journal of Dalian Maritime University,2007,40(2): 81-85.
[3] 程烨,羊云石,林婕,等.一种AUV水下接驳站的研究[J].舰船科学技术,2015,37(11): 91-94.Cheng Ye,Yang Yun-shi,Lin Jie,et al.A Survey on Underwater AUV Docking Station[J].Ship Science and Technology,2015,37(11): 91-94.
[4] 羊云石,顾海东.AUV水下对接关键技术发展现状[J].声学与电子工程,2013(2): 43-46.
[5] 郑翠娥.超短基线定位技术在水下潜器对接中的应用研究[D].哈尔滨: 哈尔滨工程大学,2008.
[6] 周杰,周文林.潜用 UUV回收技术[J].四川兵工学报,2011,32(8): 45-47.Zhou Jie,Zhou Wen-lin.Research on Recovery Technology of Unmanned Underwater Vehicle Used in Submarine[J].Journal of Sichuan Ordnance,2011,32(8): 45-47.
[7]刘和祥.面向 AUV回收控制的水下机器视觉研究[D].哈尔滨: 哈尔滨工程大学,2009.
(责任编辑: 许妍)
Autonomous Abutting Joint Flow and Control Algorithm for AUV Based on Ultra-short Baseline
ZHAO Chao-wen1,ZHANG Song2,LI Hui1
(1.Kunming Branch of the 705 Research Institute,China Shipbuilding Industry Corporation,Kunming 650118,China;2.Department of Architectural Engineering,Logistics University of People′s Armed Police Force,Tianjin 300162,China)
Because of the energy carried by an autonomous underwater vehicle(AUV) is limited,the AUV has to autonomously navigate to underwater base station after finishing a task.This paper analyzes current situation of the underwater base station,especially analyzes the abutting joint principle of the subsumption station,and proposes an abutting joint flow based on ultra-short baseline.Firstly,according to different guidance information and the distance between AUV and abutting joint station,autonomous abutting joint process of an AUV is divided into four phases,i.e.long-range phase,middle-range phase,short-range phase and end-range phase.Secondly,characteristics,working flow and control algorithm of every autonomous abutting joint phase are analyzed in detail.Finally,these control algorithms are simulated via VS2008,and the AUV is tested in a lake.The results show that the proposed autonomous abutting joint flow and algorithm are feasible,and they may have a good prospect in engineering applications.
autonomous underwater vehicle(AUV);abutting joint flow;abutting joint algorithm;ultra-short baseline (USBL);underwater base station
TJ631.2;U674.941
A
1673-1948(2016)03-0166-06
10.11993/j.issn.1673-1948.2016.03.002
2016-03-15;
2016-04-25.
赵朝闻(1992-),男,在读硕士,主要研究方向为武器系统与运用工程.