溪洛渡水电站右岸泄洪洞龙落尾及出口段混凝土缺陷处理登高设备应用探讨
2016-10-10孙宪国,林芳芳
孙 宪 国, 林 芳 芳
(1.中国人民武装警察部队 水电第七支队,湖北 武汉 430200;2.中国人民武装警察部队 水电第三总队,四川 成都 611130)
溪洛渡水电站右岸泄洪洞龙落尾及出口段混凝土缺陷处理登高设备应用探讨
孙 宪 国1,林 芳 芳2
(1.中国人民武装警察部队 水电第七支队,湖北 武汉430200;2.中国人民武装警察部队 水电第三总队,四川 成都611130)
根据溪洛渡水电站右岸泄洪洞混凝土缺陷处理技术要求,为使缺陷处理工作做到程序化、规范化,提高工效,在对泄洪洞龙落尾段进行混凝土缺陷处理施工过程中,通过技术创新,借鉴建筑工程登高维护作业经验,采用660SJ“曲臂式高空作业平台”进行泄洪洞混凝土缺陷修补,取得了较好的经济效果,实现了陡坡段混凝土缺陷处理机械化施工。
泄洪洞;混凝土;缺陷处理;机械化;溪洛渡水电站
1 概 述
溪洛渡水电站右岸泄洪洞龙落尾段为无压段与出口明渠间的衔接段,分别由上游缓坡段、奥奇曲线段、斜坡段、反弧段、下游缓坡段组成,其间布置有1#、2#、3#掺气坎,混凝土浇筑成型后底板坎高分别为2.125 m、1.65 m、2.42 m。龙落尾断面形式为圆拱直墙型,断面尺寸为14 m×19 m(宽×高),出口明渠布置有4#掺气坎,混凝土浇筑成型后底板坎高为1.8 m。
泄洪洞混凝土浇筑总量累计为52.4万m3。在施工过程中,由于自然因素、施工条件等影响,其混凝土质量通病不可避免地会发生。在混凝土缺陷处理前期,按照建设单位要求,已组织完成了泄洪洞流道混凝土过流面施工缝及裂缝、气泡、预留孔洞等缺陷修补材料的比选及工艺试验、缺陷普查等工作,根据工艺试验成果及普查缺陷类型,针对不同部位、不同缺陷编制了修补措施。在缺陷修补过程中,按照建设单位要求,为加快施工进度,对4#泄洪洞龙落尾段实行了机械化登高设备修补施工。
2 龙落尾段登高设备规划
660SJ“曲臂式高空作业平台” 广泛应用于建筑物或市政设施登高维护作业等常规登高作业领域,具有移动方便、快速等特点,适合泄洪洞边墙混凝土缺陷修补登高作业,但其缺点是其只能在平地上作业,而龙落尾斜坡的坡度为22.46°,若要采用660SJ曲臂台车作为龙落尾斜坡边墙混凝土缺陷修补的登高作业平台,需要解决其爬坡问题及水平作业平台问题,且在陡坡混凝土缺陷修补中采用660SJ曲臂台车尚属首次应用。
为解决660SJ曲臂台车在斜坡上行走问题,采用了2台“TS15-200单台提升千 斤 顶 配
φ15.24钢绞线进行牵引爬行,其中1台千斤顶做为安全保险措施。为解决660SJ“曲臂式高空作业平台”在斜坡上作业的问题,在其后端增设了三角支撑平台调节以满足其水平作业平台要求。三角支撑平台采用2台27 t级液压千斤顶进行牵引及固定。
3 牵引系统的设计
由于所选用的登高设备其动力源爬行能力有限,为满足其在4#龙落尾斜坡上爬行,需结合登高设备性能、参数布置牵引系统,本套牵引系统主要包括 “牵引力的计算及牵引设备选型”、“提升千斤顶”布置、牵引钢绞线的布置。按照厂家提供的技术参数所选用的该套设备的主要参数见表1。
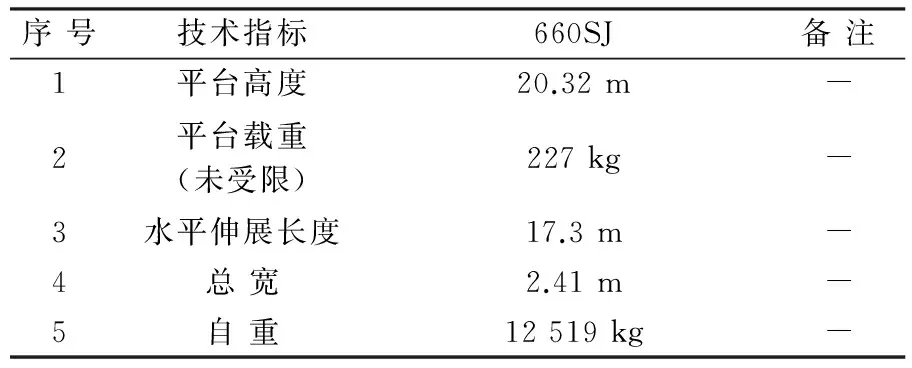
表1 660SJ系列曲臂式高空作业平台主要技术参数表
3.1牵引稳定性计算
3.1.1曲臂式高空作业平台在22.46°混凝土斜坡面上的受力分析
向上牵引时,下滑力P1为:
P1 =G2+G1f=Gsin22.46°+Gfcos22.46°
=130.19×0.38+130.19×0.92×0.02
=51.87(kN)。
静止时,下滑力P2为:
P2 =G2-G1f=Gsin22.46°-Gfcos22.46°
=130.19×0.38-130.19×0.92×0.02
=47.08(kN)。
式中P为牵引下滑力;G为设备车重力,G=130.19 kN(设备车自重为12 519 kg,其他荷载500 kg);G1为G的垂直向分解力,G1=Gcos22.46°;G2为G的轴向分解力,G2=Gsin22.46°;F为最大摩擦力,F=G1f,f为摩擦系数,取0.02。
作业时下滑力P3:
当其在斜坡面上作业时,其曲臂式高空作业平台退至三角支撑平台上,因此,其下滑力趋于零,故只需验证三角支撑平台稳定即可。
3.1.2曲臂式高空作业平台在在30°栈桥上的受力分析
660SJ曲臂式高空作业平台在30°栈桥上主要为向上牵引时的下滑力,向上牵引时的下滑力P4为:
P4 =G2+G1f=Gsin30°+Gfcos30°
=130.19×0.5+130.19×0.87×0.05
=70.76(kN)。
式中G1=Gcos30°;G2=Gsin30°;F=G1f,取0.05。
3.2牵引设备的选型
根据上述分析得出,龙落尾“660SJ曲臂式高空作业平台”的 最大牵引力为70.76 kN ,牵引设备配备2台“TS15-200单台提升千斤顶”配φ15.24钢绞线进行牵引,其中1台做为安全保险措施,方案可行。
3.3牵引系统固定端的布置
3.3.1提升千斤顶的布置
在4#泄洪洞龙落尾上缓坡段第59仓底板中心线位置布置“TS15-200”单台提升千斤顶”,两台提升千斤顶前后间隔布置,布置间距大于3 m。
3.3.2固定端支座的布置
固定端支座由400 mm×400 mm箱梁构成、长80 cm,在箱型梁上、下游间隔20 cm布置φ28锚筋锚固箱型梁,φ28锚筋伸入基岩、混凝土3 m,外露0.6 m,顶部弯折0.2 m与箱型梁焊接,两台固定端支座中心间隔3 m、同时在箱型梁上设置φ5 cm穿索孔径。箱型梁支座锚筋主要承担水平方向预应力钢绞线拉力,箱型支座共布置有φ28锚筋8根,伸入基岩、混凝土3 m,按照4#龙落尾承受最大牵引力70.76 kN为荷载参数进行验算。经验算,其满足要求。
3.4牵引点的布置
在660SJ“曲臂式高空作业平台”前端设置牵引点,牵引点由200 mm×220 mm箱型轨道梁、锚索夹具构成,在200 mm×220 mm箱型轨道梁采用不同厚度钢板焊接成铰耳插销式连接,主受力板厚3 cm、筋板厚1 cm。经对曲臂式高空作业平台牵引点强度、连接销轴强度、活动销轴两侧钢板强度进行验算得知其均符合要求。
3.5牵引钢绞线的布置
3.5.1钢绞线的布置
牵引钢绞线采用φ15.24钢绞线,自龙落尾掺气坎处至龙落尾上缓坡段,单根钢绞线下料长度约为370 m。钢绞线布置原则、方案为:
(1)钢铰线由人工自龙落尾下平段牵引布置至龙落尾上缓坡段支座处。在反弧段、斜坡段、奥奇曲线段及上缓坡段随机布置托绳辊,托绳辊直接放置在底板上,同时,在1#、2#掺气坎利用底板钢筋爬梯锚筋布置简易压绳装置,当无法利用钢筋爬梯锚筋时,则在底板垂直面上增设锚筋焊接即可。
(2)钢铰线上游端利用提升千斤顶锚固,下游端头利用布置在“履带式自行高空作业平台”的双锚索夹具进行锚固。
3.5.2钢绞线破断拉力复核
牵引时,龙落尾登高设备牵引所需的最大牵引力为70.76 kN,而φ15.24钢绞线最大破断拉力为270 kN,计算安全系数为3.82,满足要求。
4 台车作业辅助系统的设计
4.1曲臂式高空作业平台辅助系统
“曲臂式高空作业平台”需处于水平方能进行作业。为满足其在斜坡上作业,项目部按照龙落尾斜坡段并结合设备参数设计了三角支撑平台做为辅助系统。
4.1.1辅助系统结构设计
三角支撑平台主要由[10槽钢、[8槽钢及钢板组成,三角支撑平台面层长度为3.04 m、中心线宽度为2.06 m,车轮行走宽度为0.6 m,支撑平台面层设置槽钢+钢筋挡坎做为限位装置,作业时“660SJ曲臂式高空作业平台”退滑至三角支撑平台上,使其设备始终处于水平状态进行作业。
4.1.2辅助系统稳定性验算
三角支撑平台框架由[10槽钢组成,纵、横间距0.5 m布置[10槽钢,中间增设[8槽钢斜撑及剪刀撑等,按照此结构及参数分析“660SJ曲臂式高空作业平台”静止在三角支撑平台上作业时的稳定性。“660SJ曲臂式高空作业平台”静止在三角支撑平台时的状态见图1。
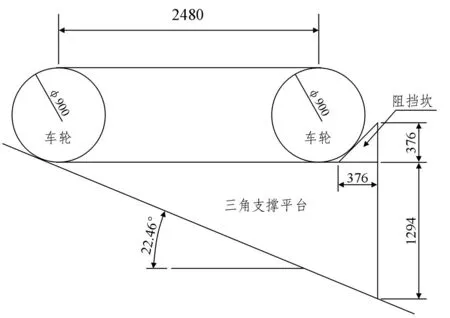
图1 660SJ曲臂式高空作业平台示意图
由图1可知,曲臂式高空作业平台静止在混凝土面上、后轮完全静止在三角支撑平台静止作业时最大荷载值为130.19 kN+2 kN(作业人员、材料最大荷载)=132.19 kN,分布至四个点受力:132.19 kN/4=33.05 kN,在每个点布置竖向槽钢两根。为简化计算,在不考虑布置斜撑、剪刀撑的基础上计算竖向槽钢的稳定性,满足要求。
4.2过坎栈桥的设计
“曲臂式高空作业平台”由4#泄洪洞出口明渠采用大吨位吊机吊入明渠底板后,自上至下爬行至3#掺气坎后挂牵引系统进行辅助牵引,跨掺气坎时布置过坎栈桥,栈桥由面层、支撑层及底板保护层、固定层构成。栈桥面层由P3015组合钢模板拼装而成,并在P3015组合钢模板上间距20 cm铺设φ32钢筋防滑条,支撑层由φ48纵、横向钢管架构成,底板保护层由4根纵向[10槽钢构成,保护已浇筑底板混凝土面,同时便于支撑层在斜坡道上的稳固。
5 安全保证措施
为确保登高设备牵引、运行安全及泄洪洞龙落尾段混凝土表面缺陷处理顺利完成,严格遵照施工方案及以下要求:
(1)登高设备的牵引及爬坡、过坎实施方案应严格按照技术方案执行,设备安装、栈桥等必须经过验收,验收合格后方可使用。
(2)设备操作人员必须经设备厂家专业人员进行培训或由设备厂家专业人员进行操作,由设备厂家专业培训的人员应在培训合格后持证上岗,并按照设备的操作规程进行操作,严禁非持证人员违规作业、野蛮操作。
(3)登高设备在移动过程中要求收回登高设备大臂,降低重心,做到“人、机”分离,避免意外发生。
(4)登高设备作业框内的施工人员在作业时必须配挂安全带,同时禁止身体外探过多而造成重心外移。
(5)登高设备牵引过坎时必须通知现场管理人员、安全员等,管理人员、安全员应全程监控作业并督促其严格落实移动过程中的安全措施。
(6)“660SJ曲臂高空作业平台”每次作业时,设备必须完全静止在三角支撑平台上并保证机身水平。
6 结 语
实践证明,溪洛渡水电站左岸泄洪洞龙落尾在缺陷处理过程中采用传统排架搭设方式,施工中投入了大量钢管、扣件、竹跳板等材料并耗费了大量人力用于脚手架搭拆和材料转运;而右岸泄洪洞通过采取以上措施,将660SJ“曲臂式高空作业平台”应用于陡坡段进行混凝土缺陷修补,实现了施工机械化且其安全可靠,在保证节点工期的同时,投入的劳动力不到左岸的一半,从而使右岸泄洪洞龙落尾段混凝土缺陷修补不仅成本大大降低,同时也提高了施工效率。
7 结 语
在泄洪洞龙落尾段混凝土缺陷修补中应用“660SJ曲臂高空作业平台”登高设备,替代了传统钢管脚手架作业方式,避免了钢管等材料的大规模转运、安拆,减少了大量人力的投入及陡坡排架搭设基础锚固对泄洪洞混凝土底板的破环,保证了过流面混凝土缺陷修补的施工质量和安全,节约了资金,使施工进度大幅度提高,创造了明显的经济效益和社会效益,在今后的水利水电工程陡坡段混凝土缺陷处理中值得借鉴和推广。
(责任编辑:李燕辉)
2016-07-12
TV7;TV52;TU69
B
1001-2184(2016)04-0012-03
孙宪国(1973-),男,吉林松原人,高级工程师,学士,从事水利水电工程的施工技术与管理工作;
林芳芳(1985-),女,安徽天长人,工程师,学士,从事水利水电工程施工技术与管理工作.