基于递推最小二乘法的永磁伺服系统参数辨识
2016-09-27王培良李祖欣蔡志端秦海鸿
荀 倩 王培良 李祖欣 蔡志端 秦海鸿
(1.湖州师范学院工学院 湖州 313000 2.南京航空航天大学江苏省新能源发电与电能变换重点实验室 南京 211100)
基于递推最小二乘法的永磁伺服系统参数辨识
荀倩1王培良1李祖欣1蔡志端1秦海鸿2
(1.湖州师范学院工学院湖州313000 2.南京航空航天大学江苏省新能源发电与电能变换重点实验室南京211100)
为使永磁同步电机(PMSM)控制系统在复杂环境中具有较好的动态性能,伺服系统必须具有参数辨识和参数自整定的功能,而转动惯量与负载转矩辨识是其首要解决的问题。采用零阶保持器对电机运动方程进行离散化建模,考虑了摩擦系数对辨识结果的影响,将基于遗忘因子递推最小二乘辨识算法应用于该离散模型可以同时辨识出系统转动惯量、负载转矩和摩擦系数。同时,针对Matlab/Simulink中库模型参数不能在线动态修改的缺点,提出改进型PMSM模型,以此搭建了伺服系统的仿真控制模型,完成了定参数与变参数的动态仿真。最后,在stm32微控制器上进行了实验验证。仿真和实验表明该文提出的电机离散化模型和参数辨识方法具有一定的准确性和实时性,仿真结果验证了改进型PMSM模型在变参数仿真研究中的实用性。
永磁同步电机动态性能参数辨识离散模型遗忘因子递推最小二乘法
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)由于结构简单、运行可靠、功率密度大、效率高等优点,易于构成高性能的伺服系统,被广泛应用于家用电器、交通工具、工业控制等各个领域[1],在电力拖动系统中具有重要的应用价值。而永磁同步电机是集电气与机械为一体的部件,机械在运动中会受到诸多无法预知因素的影响,如外界负载扰动、摩擦力扰动或系统参数变化等[2]。这些扰动会直接或间接影响系统精度、稳定性以及动静态特性。
电机运行中,随着电机运行工况的变化,系统负载转矩和转动惯量也随之改变。当负载转矩增加或减小时,由于传统PI调节器本身属于一种误差调节,必然导致转速调节的滞后,在负载突变的较短时间内导致转速跌落或上升;而当电机转动惯量增加时,会使系统调节时间增加,出现不稳定,引起爬升现象,当电机转动惯量减小时,虽然会减小系统动态调节时间,但会使电机转速出现超调甚至振荡现象[3]。为了提高系统的动态抗扰性能,需要相应地调整调节器控制参数,使系统运行特性为最佳状态,而转动惯量和负载转矩辨识是其首要研究的问题。
近年来,国内外学者对永磁伺服系统的参数辨识进行了许多研究,主要用到减速法、人工轨迹规划法、转矩限幅加速度法[3,4]等离线辨识方法。该类方法得到的参数估计值精度较高,且对计算时间要求不是很严格,但在电机传动负载过程中,由于运行工况的变化,整个系统的负载转矩、转动惯量或其他参数会随时改变,采用离线辨识方法得到的伺服系统参数是一个静态的估算值,不能反映系统参数的动态变化。因此,国内外许多学者在离线辨识的基础上,将现代控制理论、系统辨识理论等应用于参数辨识中,提出了各种在线辨识方法,包括最小二乘法、自适应朗道离散时间法、扩展卡尔曼滤波法、参数估计梯度校正法、蚁群算法、状态观测器法等[5-13]。
文献[5,6]提出了基于朗道离散时间法的转动惯量辨识算法。其中文献[5]采用降阶观测器对负载转矩进行了辨识,但朗道离散时间算法和降阶观测器收敛时间较长,且转动惯量和负载转矩的辨识不能同时实现。文献[7]利用遗传算法设计了一种系统参数辨识的方法,可以同时估算出电机定子电阻、dq轴电感和永磁体磁链,仿真和实验结果表明4个待辨识参数均能在较短时间内收敛,且其鲁棒性较好。文献[8]提出了一种定阶频域经验最优参数估计算法(Fixed-order Empirical Frequency-domain Optimal Parameter Estimation,FOEFOP),对电机转动惯量进行了辨识,仿真和实验说明了FOEFOP算法在惯量辨识方面不受负载扰动和系统采样周期影响,辨识精度高,具有较强鲁棒性。文献[9]对永磁同步电机电阻及电感等参数进行了辨识,在此基础上设计了电流调节器,实现了永磁同步电机的自适应控制。文献[3]在传统离线辨识方法的基础上,提出了改进型的加减速算法、二分法及模型参考自适应辨识法,对各种辨识算法进行了对比分析。文献[10,11]分别提出了蚁群辨识算法与转动惯量辨识的误差补偿算法,其对参数辨识精度的改善具有重要的指导意义。文献[12,13]采用带遗忘因子的递推最小二乘法对永磁同步电机定转子电感和漏电感进行了辨识,并采用基于瞬时无功功率模型的自适应方法对定转子电阻进行了辨识,具有一定的实用价值。文献[14]提出了一种基于模型参考自适应理论的辨识方法,在同一模型中可以辨识出表贴式PMSM的定子电阻、交直轴电感和永磁体磁链等多个参数,具有实用性。
以上文献在进行电机转动惯量辨识时的离散化建模上忽视了摩擦系数对辨识结果的影响。本文考虑了摩擦系数,引入零阶保持器对电机的运动方程离散化,将基于遗忘因子递推最小二乘方法应用于该模型,可同时辨识出系统转动惯量、负载转矩和摩擦系数,搭建了Matlab/Simulink仿真模型,对伺服系统的定参数辨识和变参数辨识进行了仿真研究。在进行变参数仿真时,针对Simulink中库模型参数不能在线动态修改的不足提出了改进型PMSM模型。
1 最小二乘法理论
最小二乘法最早是由高斯(K.F.Gauss)在形体运动轨道预报研究工作中提出的,此后,其成为参数辨识理论的奠基石,被广泛应用于系统辨识和参数估计中[15]。
1.1递推最小二乘法

(1)
式中,Φ为数据向量矩阵;Y为系统输出矩阵。
批处理最小二乘法在每次处理数据时需要计算矩阵的逆,尤其是当尾数较大时,计算量较大,因此需要采用递推最小二乘法。
递推最小二乘法的思想为

(2)
由此可得k时刻的批处理最小二乘估计为
(3)
令协方差矩阵P(k)为
=[P-1(k-1)+φ(k)·φT(k)]-1
(4)
由此可得
P-1(k)=P-1(k-1)+φ(k)·φT(k)
(5)
由式(3)、式(4)可推算出k-1时刻的估算值为
(6)
由式(5)、式(6)可得
(7)
于是k时刻的最小二乘估计可表示为
(8)
式中,K(k)为增益向量,K(k)=P(k)φ(k)。
由矩阵求逆引理与式(8)可得递推最小二乘法的迭代公式为
(9)

1)得到L组数据(L>na+nb+1)后,利用批处理最小二乘法计算
(10)
2)直接令

(11)
式中,α可以取充分大的正实数,一般为104~106;ε可以取充分小的正的实向量或零向量。
1.2遗忘因子递推最小二乘法
由于随着处理数据的增加,递推最小二乘法将出现“数据饱和”现象。为防止这种现象的发生,一般采用带遗忘因子的递推最小二乘法,对性能指标做出一定修正。
设目标函数J为
(12)
式中,λ 为遗忘因子,0<λ≤1。
根据式(12),对照递推最小二乘法的推导过程可得带遗忘因子递推最小二乘法参数估算的迭代公式为
(13)
通常遗忘因子λ 的取值范围一般为 0.9 ≤λ ≤1。若λ =1,则式(13)即为递推最小二乘法的迭代公式。
2 辨识算法实现
2.1电机运动方程
在电气传动中,电机通过其传动轴向负载提供电磁转矩,对负载运动的控制也就是对电机传动轴上电磁转矩的控制,电机带动负载的传动系统如图1所示。
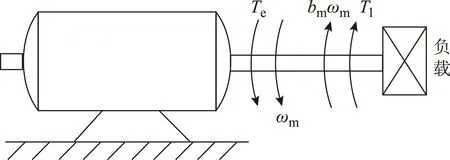
图1 电机及其负载Fig.1 The motor and its load
根据动力学原理,可得永磁同步电机的机械运动方程为
(14)
式中,Te为电磁转矩;J为系统转动惯量;ωm为转子机械角速度;bm为摩擦系数;Tl为负载转矩,其包含由电机空载损耗产生的电机空载转矩。
2.2运动方程离散化
对式(14)进行拉氏变换得
Te(s)-Tl(s)=bmωm(s)+Jsωm(s)
(15)
令y(s) =ωm(s),u(s)=Te(s)-Tl(s),则可得电机运动方程的传递函数为
(16)
零阶保持器的传递函数为
(17)
因为
(18)
带有零阶保持器的开环系统脉冲传递函数为

(19)
即
(20)
因此,电机运动方程可离散化为
ωm(k)-e-bmTc/Jωm(k-1)=
(21)
令b=-e-BmTc/J,a=(1+b)/Bm,c=aTl(k-1), 则式(21)可转换为
REUBROYCHAROEN Prasert(1980-),男,博士,教授,博士生导师,主要从事多相催化与化学反应工程研究。
ωm(k)=aTe(k-1)-bωm(k-1)+c·(-1)
(22)
输出y(k)=ωm(k),φT(k)=[Te(k-1),-ωm(k-1),-1], θ=[a,b,c]T, 则有
y(k)=φT(k)·θ
(23)
Tc为辨识算法的控制周期,由于Tc很小,所以采样频率很高,可近似忽略离散化带来的失真,由高等数学中极限的知识可将a、b、c简化为
(24)
对应最小二乘法递推算法公式得
(25)

3 PMSM惯量辨识控制框图
根据式(13)和式(25)可以得到伺服系统参数辨识的程序流程如图2所示。
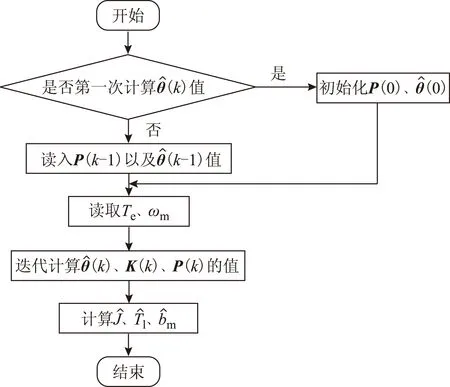
图2 辨识器的程序流程Fig.2 The program flow chart of the identifier
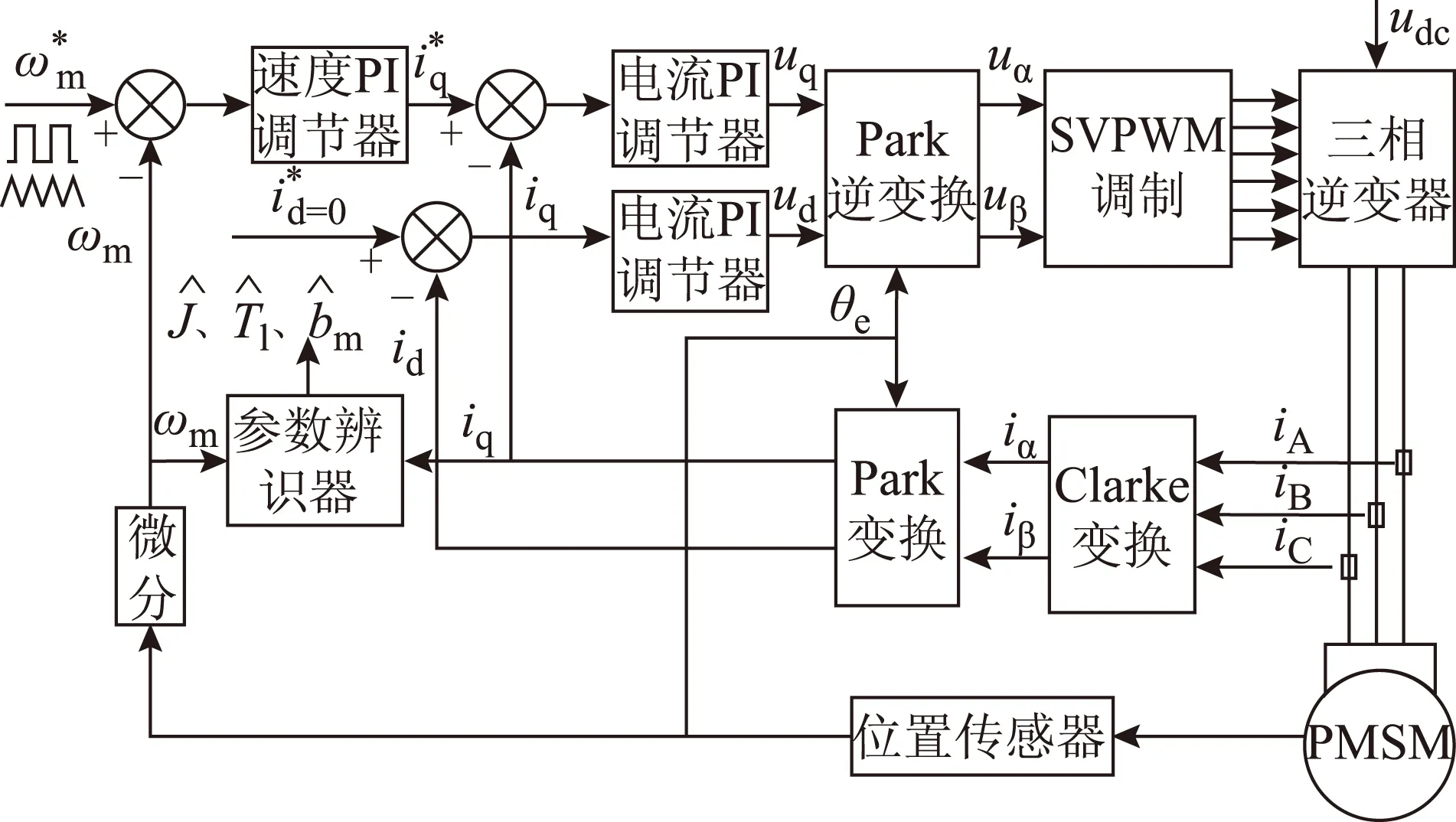
图3 伺服系统惯量辨识框图Fig.3 The inertia identification block diagram

4 仿真与实验
在Matlab2013/Simulink环境下搭建如图3所示的PMSM双闭环矢量控制系统。PMSM的转子转动惯量标称值Jm=0.915×10-3kg·m2,摩擦系数bm=3.035×10-4N·m·s。当电机空载起动时,负载转动惯量为0,总转动惯量即为电机转子转动惯量,则伺服系统的转动惯量J =Jm=0.915×10-3kg·m2。
4.1仿真验证
4.1.1定参数仿真
为了测试伺服系统在恒定转动惯量、恒定负载条件下遗忘因子λ 对辨识结果的影响,仿真中分别取λ为1和0.98,对递推最小二乘法和带遗忘因子的递推最小二乘法进行了仿真,系统转动惯量J =Jm=0.915×10-3kg·m2,负载转矩Tl=0N·m,其仿真结果如图4和图5所示。
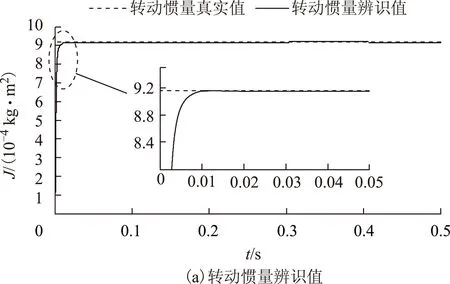
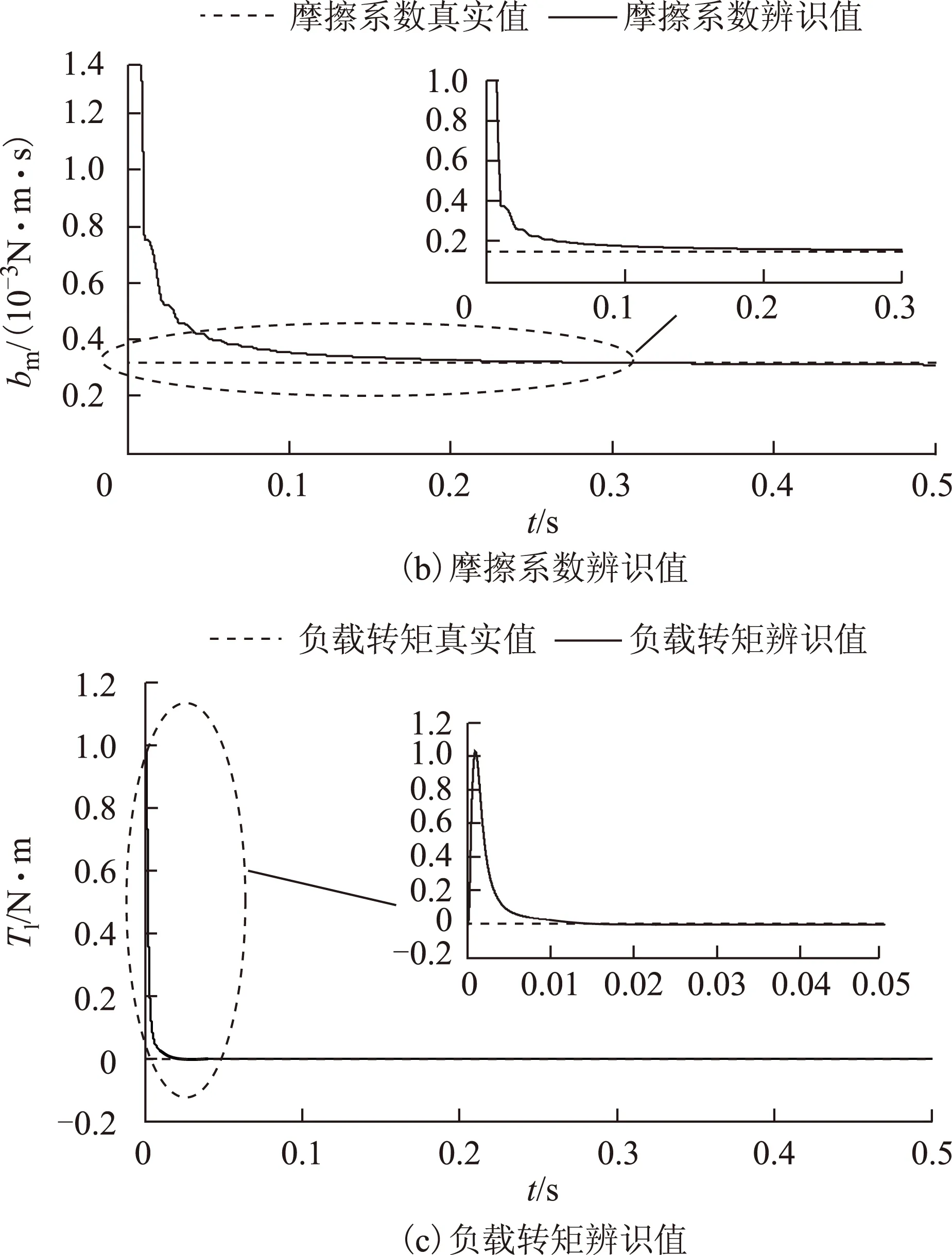
图4 λ为1时的辨识结果Fig.4 The identification results when λ is equal to 1
由图4可以看出,当λ取1时,转动惯量和负载转矩的辨识值基本上可以在0.02s时收敛为真实值,而摩擦系数的辨识收敛时间较长为0.2s,总收敛时间为0.2s。图5表明λ取0.98时,转动惯量、摩擦系数和负载转矩的辨识值均可在0.002s内收敛为真实值,并且对转动惯量、摩擦系数和负载转矩的辨识更加准确,因此带遗忘因子的递推最小二乘法辨识收敛速度更快,辨识精度更高。
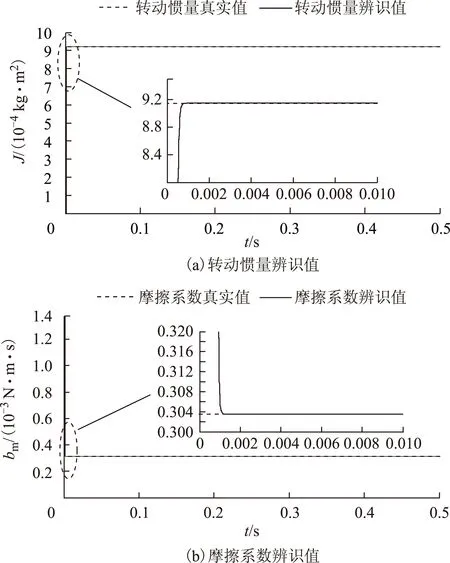
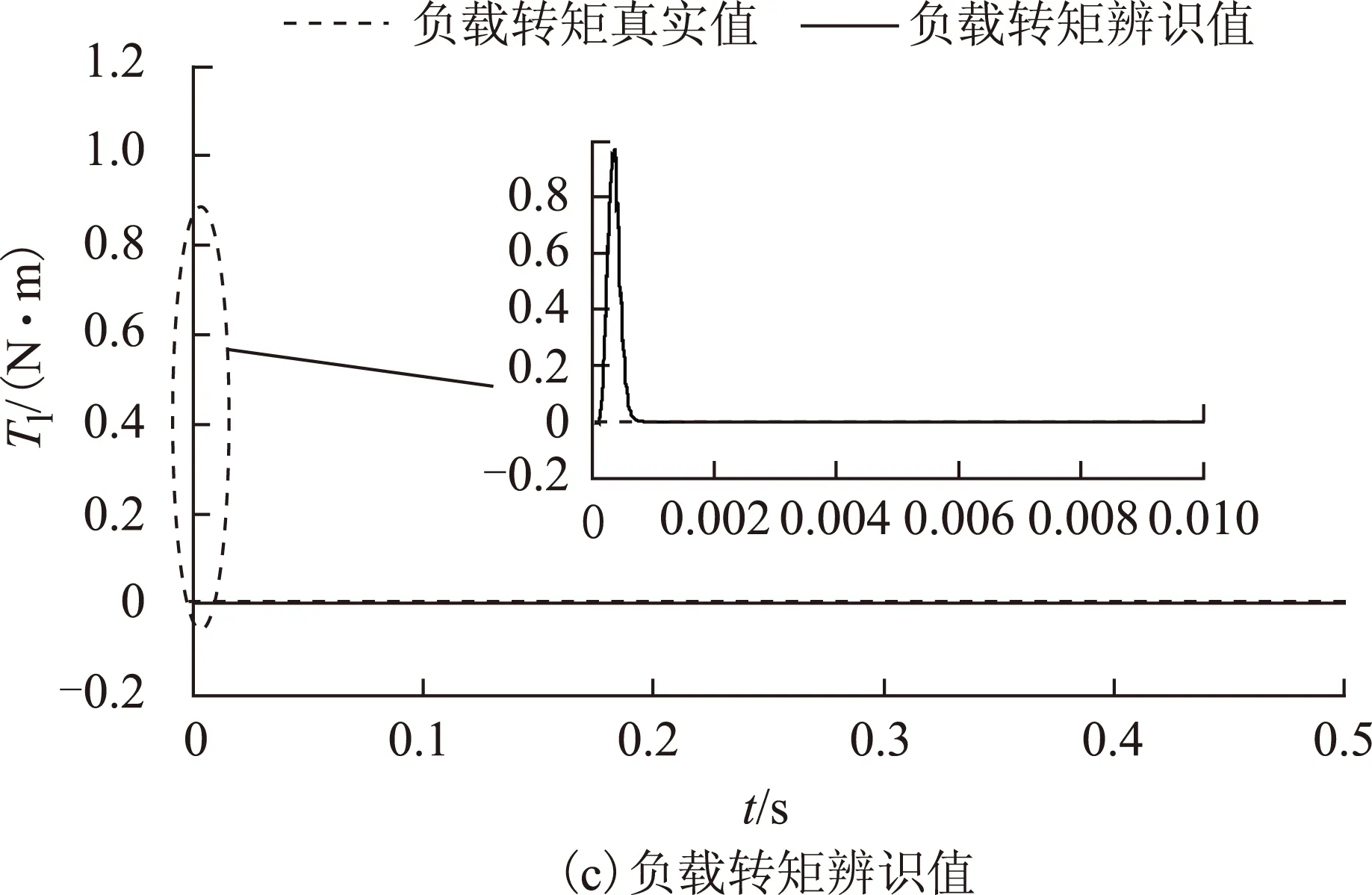
图5 λ为0.98时的辨识结果Fig.5 The identification results when λ is equal to 0.98
4.1.2变参数仿真
由于Simulink中集成PMSM模块的转动惯量参数只能在仿真运行前通过静态框离线设置,而变惯量仿真需要在线修改转动惯量值以模拟其随运行工况的变化。为使原有PMSM模型中的转动惯量可以在线动态修改,可以采用两种方法:①根据PMSM数学模型创建自定义模型;②根据需求修改库文件模型,然后再重新封装[16]。而前者在自定义模型创建过程中,对PMSM电机的数学建模做了一些近似处理,会造成与实际模型差别较大,且自定义搭建模型工作量较大,因此本文采用第二种方法对库文件模型进行修改。
由于系统原有的PMSM组件在封装好之后是处于锁定状态的,用户不能直接修改底层模块,因此首先需要在解锁状态下,对库文件中PMSM模型中的底层模型进行修改,找到需要修改的模块替换成预想模型,再将其更新到仿真中。图6为修改后的PMSM封装图。仿真时,J端口可接入任何常量或变量信号,以实现参数的在线修改。在电机运行过程中,摩擦系数的变化量较小,其变化可忽略不计,而在电机负载转矩不变或变化时,转动惯量都有可能变化。因此,以下是在遗忘因子λ为0.98的情况下,对电机的变惯量和变负载转矩的仿真。
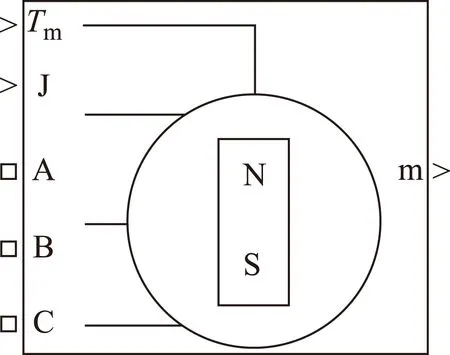
图6 改进后的PMSM封装Fig.6 PMSM package improved
首先分析电机负载转矩Tl=0N·m,当系统转动惯量J按照Jm、2Jm、5Jm、10Jm的连续阶跃信号变化时,辨识结果如图7所示。由仿真波形可见,在仿真时间t =0.1s、0.2s、0.3s时刻,转动惯量的真实值发生阶跃跳变,转动惯量的辨识值均在0.002s内跟踪真实值的变化,较为准确地识别出转动惯量值,而负载转矩的辨识会在转动惯量突变瞬间有一定影响,但会在0.001s内恢复。
在电机负载转矩Tl=0N·m的情况下,当系统转动惯量按照J =[2 +sin(20πt)]Jm的正弦规律变化时,辨识结果如图8所示。转动惯量的辨识值可以很快跟踪转动惯量真实值的变化,但转动惯量真实值变化频率较快,导致负载转矩辨识值一直在0N·m附近波动。
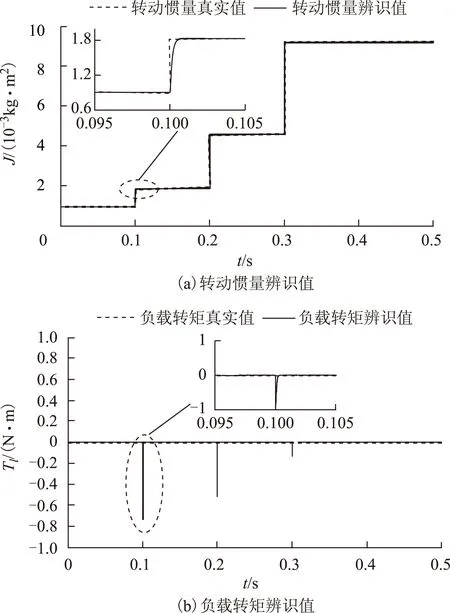
图7 空载时阶跃转动惯量的辨识结果Fig.7 Identification results of step inertia without load
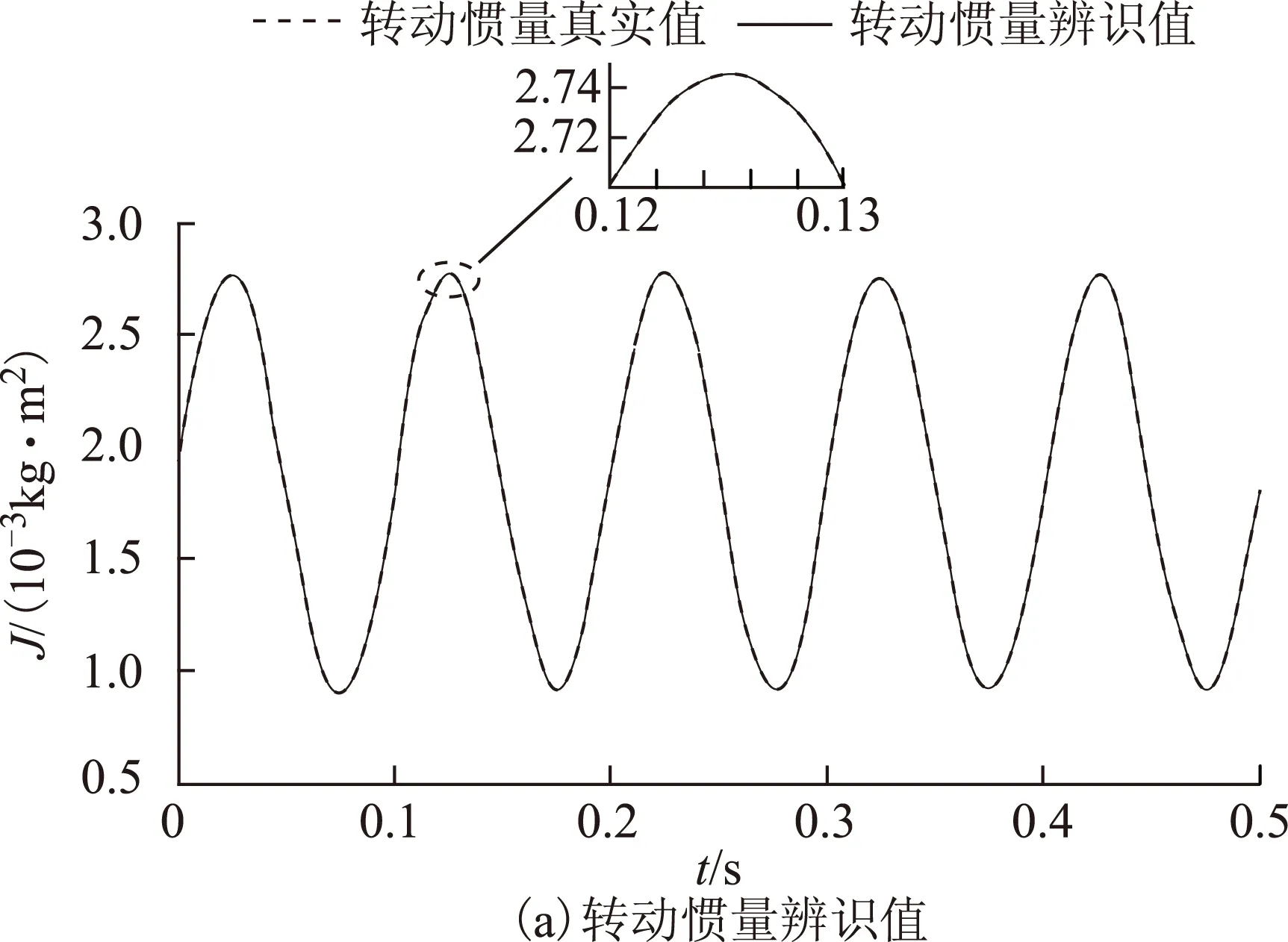
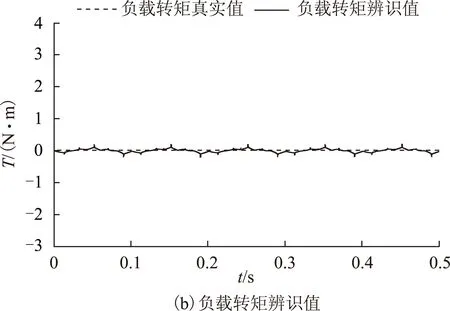
图8 空载时正弦转动惯量的辨识结果Fig.8 Identification results of sine inertia without load
当电机负载转矩Tl在仿真时间t =0.1s、0.2s、0.3s时刻从0N·m连续变化为1N·m、2N·m、5N·m,而相应的系统转动惯量J按照Jm、2Jm、5Jm、10Jm的连续阶跃信号变化时,辨识结果如图9所示。转动惯量和负载转矩可以在0.002s内跟随给定值变化。
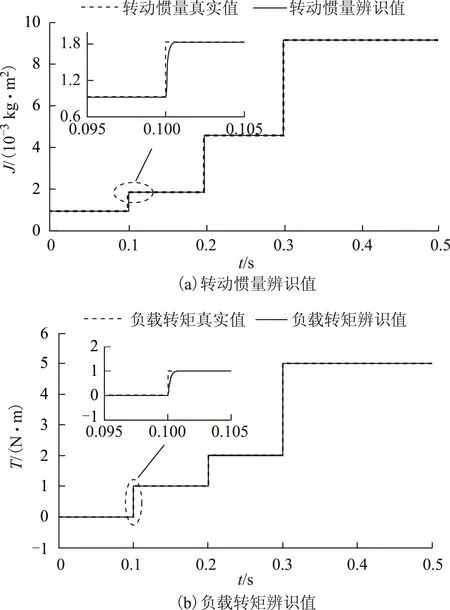
图9 阶跃负载、阶跃转动惯量时辨识结果Fig.9 Identification results of step inertia with step load
以上辨识结果表明,改进型的PMSM模型可以在线动态修改模型参数,带遗忘因子的最小二乘辨识算法收敛时间短,辨识精度高。
4.2实验验证
为验证本文提出的离散化模型与辨识方法的有效性,搭建基于stm32f103rc芯片的参数辨识测试平台,其由磁滞测功机、联轴器、永磁同步电机、控制器、调压器、示波器和计算机构成,实验系统如图10所示。
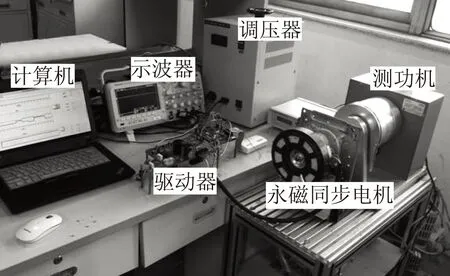
图10 参数辨识测试平台Fig.10 Test platform of parameter identification
为验证本文方法的辨识性能,首先在空载条件下进行负载转矩与转动惯量辨识,辨识算法同时用到电磁转矩和电机转速,在实际系统中,电机转速的计算周期为500ms,辨识周期Ts不能小于转速计算周期的最大值。因为若辨识周期过小,在一个周期内电磁转矩的采样存在一定噪声,干扰辨识结果,这将导致辨识结果不稳定;但是辨识周期也不能太大,在一个周期内,电机的加速度可能发生变化,电机运动方程的离散化模型和实际有偏差,模型的不准确会给辨识算法带来误差,经实验调试,辨识周期取1ms。
为了方便观察算法的收敛过程,本文将Tl、Ts/J作为转动惯量辨识结果的观测量。在实际应用中,电机一般会处于频繁起停工况,因此实验中转速给定为阶跃信号,为使电机有充裕时间加速到给定转速,转速给定周期为500ms,转速在300~600r/min之间变化的梯形波。
图11为空载条件下的参数辨识结果。转动惯量和负载转矩可以在6s内收敛,其辨识值分别为0.915×10-3kg·m2、0N·m,辨识结果准确。

图11 空载条件下参数辨识结果Fig.11 Parameter identification results under no load condition
为验证变参数条件下的辨识结果,空载时辨识结果收敛之后突加2N·m负载的实验波形如图12所示。空载时,负载转矩收敛值为0N·m,转动惯量收敛值为1.387×10-3kg·m2(该转动惯量值为电机本体转动惯量与联轴器、测功机转动惯量之和),突加2N·m负载,负载转矩和转动惯量辨识值分别在5s内收敛为2N·m和1.965×10-3kg·m2。
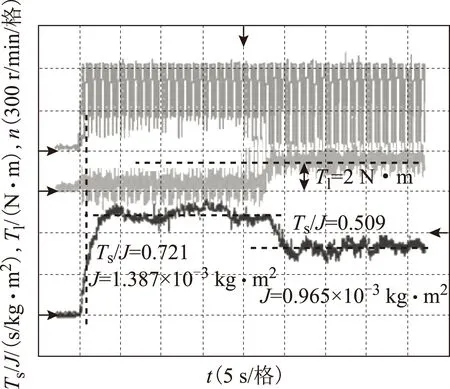
图12 加载条件下参数辨识结果Fig.12 Parameter identification results under load condition
5 结论
目前,大部分的转动惯量辨识模型忽略了摩擦系数对辨识结果的影响。本文在进行电机运动方程离散化建模时考虑了摩擦系数,设计了基于遗忘因子递推最小二乘法的伺服系统参数辨识方法,可以同时辨识出转动惯量、摩擦系数和负载转矩。并针对Simulink集成模块不能进行参数动态修改的缺点,通过修改库文件模型来弥补集成模型的不足,提出了改进型PMSM模型。仿真与实验表明辨识器辨识速度快,辨识误差小,具有较好的跟踪特性,同时,仿真验证了改进模型的正确性。本文对Simulink库模型中PMSM模块的修改方法适用于其他库模型的修改,改进的PMSM模型在时变参数辨识中具有较大的实用价值。基于遗忘因子最小二乘辨识算法可应用于电机其他参数的辨识,以便更好地监控电机运行。
[1]DuttaR,RahmanMF.Designandanalysisofaninteriorpermanentmagnet(IPM)machinewithverywideconstantpoweroperationrange[J].IEEETransactionsonEnergyConversion,2008,23(1):25-33.
[2]ZhangDongyu,DevoreCE,JohnsonEA.Responsemodificationtoimprovetheparameteridentificationofshearstructures:anexperimentalverification[J].IEEE/ASMETransactionsonMechatronics,2013,18(6):1683-1690.
[3]孙昊,王茂海,齐霞.基于PMU实测数据的同步发电机参数在线辨识方法[J].电力系统保护与控制,2014,42(3):31-36.SunHao,WangMaohai,QiXia.SynchronousgeneratorparametersidentificationbasedonPMUdata[J].PowerSystemProtectionandControl,2014,42(3):31-36.
[4]BarcellonaS,CiccarelliF,IannuzziD,etal.Modelingandparameteridentificationoflithium-ioncapacitormodules[J].IEEETransactionsonSustainableEnergy,2014,5(3):785-794.
[5]鲁文其,胡育文,梁骄雁,等.永磁同步电机伺服系统抗扰动自适应控制[J].中国电机工程学报,2011,31(3):75-81.
LuWenqi,HuYuwen,LiangJiaoyan,etal.Anti-disturbanceadaptivecontrolforpermanentmagnetsynchronousmotorservosystem[J].ProceedingsoftheCSEE,2011,31(3):75-81.
[6]张占学.基于最小二乘法的pH值温度补偿模型[J].电气技术,2015,16(2):115-117.
ZhangZhanxue.ResearchofpHvaluetemperaturecompensationmodulebasedontheleastsquaresmethod[J].ElectricalEngineering,2015,16(2):115-117.
[7]肖曦,许青松,王雅婷,等.基于遗传算法的内埋式永磁同步电机参数辨识方法[J].电工技术学报,2014,29(3):21-26.
XiaoXi,XuQingsong,WangYating,etal.Parameteridentificationofinteriorpermanentmagnetsynchronousmotorsbasedongeneticalgorithm[J].TransactionsofChinaElectrotechnicalSociety,2014,29(3):21-26.
[8]NiuLi,XuDianguo,YangMing,etal.On-lineinertiaidentificationalgorithmforPIparametersoptimizationinspeedloop[J].IEEETransactionsonPowerElectronics,2015,30(2):849-859.
[9]王少威,万山明,周理兵,等.利用蚁群算法辨识PMSM伺服系统负载转矩和转动惯量[J].电工技术学报,2011,26(6):18-25.
WangShaowei,WanShanming,ZhouLibing,etal.IdentificationofPMSMservosystem’sloadtorqueandmomentofinertiabyantcolonyalgorithm[J].TransactionsofChinaElectrotechnicalSociety,2011,26(6):18-25.
[10]徐东,王田苗,魏洪兴.一种基于简化模型的永磁同步电机转动惯量辨识和误差补偿[J].电工技术学报,2013,28(2):126-131.XuDong,WangTianmiao,WeiHongxing.Asimplifiedmodelbasedinertiaidentificationalgorithmwitherrorcompensationofpermanentmagnetsynchronousmotors[J].TransactionofChinaElectrotechnicalSociety,2013,28(2):126-131.
[11]阳同光,桂卫华.基于粒子群优化神经网络观测器感应电机定子电阻辨识[J].电机与控制学报,2015,19(2):89-95.
YangTongguang,GuiWeihua.Statorresistanceidentificationforinductionmotorbasedonparticleswarmoptimizationneuralnetworkobserver[J].ElectricMachinesandControl,2015,19(2):89-95.
[12]赵海森,杜中兰,刘晓芳,等.基于递推最小二乘法与模型参考自适应法的鼠笼式异步电机转子电阻在线辨识方法[J].中国电机工程学报,2014,34(30):5386-5394.
ZhaoHaisen,DuZhonglan,LiuXiaofang,etal.Anon-lineidentificationmethodforrotorresistanceofsquirrelcageinductionmotorsbasedonrecursiveleastsquaremethodandmodelreferenceadaptivesystem[J].ProceedingsoftheCSEE,2014,34(30):5386-5394.
[13]GautierM,VentureG.Identificationofstandarddynamicparametersofrobotswithpositivedefiniteinertiamatrix[C]//2013IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems,Tokyo,2013,5815-5820.
[14]杨宗军,王莉娜.表贴式永磁同步电机的参数在线辨识[J].电工技术学报, 2014,29(3):111-118.
YangZongjun,WangLina.OnlineMulti-parameteridentificationforsurface-mountedpermanentmagnetsynchronousmotors[J].TransactionsofChinaElectrotechnicalSociety,2014,29(3):111-118.
[15]LiGuoqi,WenChangyun.Identificationofwienersystemswithclippedobservations[J].IEEETransactionsonSignalProcessing,2012,60(7):3845-3852.
[16]王莉娜,杨宗军.SIMULINK中PMSM模型的改进及在参数辨识中的应用[J].电机与控制学报,2012,16(7):77-82.
WangLina,YangZongjun.PMSMmodel’sreforminSIMULINKandapplicationinparameters’identification[J].ElectricMachinesandControl,2012,16(7):77-82.
PMSM Parameters Identification Based on Recursive Least Square Method
Xun Qian1Wang Peiliang1Li Zuxin1Cai Zhiduan1Qin Haihong2
(1.School of EngineeringHuzhou UniversityHuzhou313000China 2.Jiangsu Key Laboratory of New Energy Generation and Power Conversion Nanjing University of Aeronautics and AstronauticsNanjing211100China)
The permanent magnet servo control system must have features of parameter identification and parameter self-tuning to get better dynamic performance in a complex environment.Among them,the identification of inertia and load torque has the first priority.In this paper,the zero-order holder is introduced to discretize the motion equation of the motor.And the influence of the friction coefficient on the identification results is taken into consideration.The inertia,the load torque,and the friction coefficient can be identified simultaneously using the recursive least square method with a forgetting factor.In the Matlab/Simulink library model,the parameters cannot be modified on-line dynamically.So the improved PMSM model is proposed.Then the servo system simulation control model is built up.The constant and the variable parameters of dynamitic simulation are conducted.Finally,the experiments are carried out on the stm32 micro controller.The simulation and experimental studies show that the motor discrete model and the parameter identification method proposed in the paper have a certain accuracy and real-time property.The simulation results show the usefulness of the improved PMSM model in the variable parameter simulation study.
Permanent magnet synchronous motor,dynamic performance,parameters identification,discrete model,recursive least squares method with a forgetting factor
2015-02-22改稿日期2015-05-20
TM351
荀倩女,1990年生,硕士,研究方向为参数辨识、电机控制、功率变换器。
E-mail:xunq520@hotmail.com(通信作者)
王培良男,1963年生,教授,研究方向智能控制、系统辨识。
E-mail:wpl@zjhu.edu.cn
国家自然科学基金(61573136,61573137)和湖州市公益性技术应用研究计划项目(2015GZ05)资助。