远距离视觉测量中的快速靶标提取与解码方法
2016-09-23李德志陶青川黄凤英
李德志,陶青川,黄凤英
(1.四川大学电子信息学院,成都 610065;2.78009部队,成都 610066)
远距离视觉测量中的快速靶标提取与解码方法
李德志1,陶青川1,黄凤英2
(1.四川大学电子信息学院,成都610065;2.78009部队,成都610066)
0 引言
在视觉测量中,不同角度采集图像的精确匹配是一个重要环节。视觉测量具有非接触测量、测量点多等特点,常用于测量大型目标以及对动态物体进行姿态估计,但是对多幅高分辨率图像直接进行特征点匹配的计算量大,匹配精度不高,通常,结合人工靶标作为待测物体特征点来帮助匹配[1]。
目前为止,国内外学者在靶标设计和检测识别方面已做了很多研究。Schneider C T[2]、Forbes K[3]、Ahn S J[4-5]、Shortis M R[6]等国外学者设计了各种不同的靶标,主要分为环状靶标、点状靶标、正方线形靶标三大类。由于环状靶标具有易识别、平移旋转无关性等优点,所以本文选择环状靶标作为研究对象。同时,在远距离高速采集条件下获取的图像具有对比度低、灰度不均匀、尺寸小等问题,加大了靶标的快速提取与准确解码的难度。Forbes K[3]、宋丽梅[7]、苏新勇[8]等学者对环状靶标的提取与解码进行了研究,但是他们都没有考虑到在实际的应用环境中图像具有的这些问题,从而忽略了对采集到的图像进行图像增强以及准确高效的局部二值化等预处理步骤,同时,对小尺寸的环状靶标进行高精度解码算法也是必须重新研究的。
针对现有技术的不足,为了保证环状靶标的识别准确率,本文提出了幂律变换与阈值截断对图像灰度概率密度进行调整的图像增强以及利用灰度积分图像的快速局部二值化等预处理方法,同时也提出了一种基于起始位编码带高分辨率切割的高精度解码方法。通过对中心圆轮廓进行最小二乘椭圆拟合,中心定位达到亚像素精度。
1 Schneider编码方案
10位Schneider编码方案[2]的靶标如图1所示。

图1 Schneider编码靶标
它由中心圆和同心编码环带组成,编码环带按照角度均分为10份,每份36°,每一份可以称为亮环带或者暗环带,相应的二进制码为1或者0,“1”表示该位上有编码点,“0”表示该位上没有编码点,由于编码环带并没有规定起始点,以任意一个编码点为起始位置,按顺时针方向读取编码环带的码值,可以组成长度为10的二进制序列,对这个二进制序列进行循环移位,选取其中数值最小的二进制序列作为该靶标的码值。按照这种编码方法列出了编码点份数N和编码方案数K之间的关系如表1所示。

表1 编码点份数和编码方案数关系
2 靶标提取与解码方法
在实际应用环境中采集到的图像具有对比度低,灰度不均匀等缺点,所以在提取图像轮廓之前需要对图像进行图像增强以及快速局部二值化等图像预处理步骤,之后再进行轮廓提取、靶标中心定位及解码。
2.1图像预处理
(1)图像增强
相机在远距离高速采集下,曝光时间短,获取的图像对比度低,不利于后续靶标提取。本文提出一种简单高效的图像增强算法。步骤如下:
步骤一:计算图像灰度分布的概率密度

其中,P(k)为第k级灰度分布的概率密度,L为灰度等级的级数,k为在L个灰度等级中的任一灰度等级,nk为图像中第k级灰度的像素个数,N为图像灰度的总数:
步骤二:对图像灰度分布概率密度进行幂律变换
其中,Pq(k)为第k个灰度等级扩展后的概率密度,Pmax是原始图像灰度分布概率密度的最大值,q是灰度分布概率密度的因子,q∈(0,1)。
步骤三:设定阈值T,对步骤二所得到的灰度分布概率密度Pq(k)进行截断

其中,PT(k)为阈值截断后图像灰度分布概率密度,T灰度分布概率密度的截断阈值。
步骤四:根据直方图均衡化原理,可以得到输入-输出转换函数F(k):

其中,F(k)为图像增强后的灰度。
低照度图像背景色所属灰度级的概率密度往往为概率密度中的最大值,也即Pmax,前景色所属灰度级的概率密度往往小于Pmax,扩展概率密度时,q越小,图像中小于Pmax的概率密度经扩展后增加越快,而概率密度等于Pmax的则保持不变,从而增强了图像前景色的对比度,抑制了图像的背景色,实现了低照度图像增强。
(2)快速局部二值化
在复杂的光照条件下,高效的局部二值化方法十分必要,基于上述要求,本文提出基于灰度积分图像快速局部二值化的方法,其步骤如下:
步骤一:对于灰度等级为[0,L-1],大小为W×H的灰度图像F(i,j),计算灰度积分图像I(i,j):

步骤二:设定局部二值化的块大小为S×S,根据灰度积分图像来依次计算以每个像素为中心,周围块大小为S×S的平均灰度Avg(i,j):

步骤三:如果当前像素灰度F(i,j)低于它的平均灰度Avg(i,j)的t%,则此像素灰度二值化值Bin(i,j)为0,否则为1:

2.2靶标提取
预处理后,对图像进行边缘检测,边缘检测的方法很多,如Sobel算子、Roberts算子、Canny算子等,Canny算子产生单像素边缘且对噪声不敏感,但是由于计算复杂,时间代价大。本文采用对二值化图像进行连通区域提取与标记、边界跟踪的方法来进行轮廓提取,简单高效。提取到的轮廓含有待测物体、靶标和背景等,需要对轮廓进行最小二乘椭圆拟合,再通过轮廓周长、形状因子、拟合残差、灰度对比度与方差等判定准则[9]进行靶标提取。
2.3靶标解码

图2 二值靶标图
步骤一:从二值化图像中提取出来的一个靶标区域,如图 2所示。
步骤二:根据靶标提取步骤中的轮廓最小二乘拟合结果,可以得到编码中心椭圆的长半轴为a1,短半轴为b1,角度为θ1,中心坐标(xCenter,yCenter),根据靶标制作时的实际尺寸可以得到编码环带内的长半轴a2、短半轴b2、角度θ2,编码环带外的长半轴a3、短半轴b3、角度为 θ3,其中 θ1=θ2=θ3,编码带内百分比 t2∈(1.05,1.15),t3∈(0.9,0.97),遍历二值图中靶标区域的所有像素点(x,y)
若像素坐标点满足上面的条件,说明该点位于编码环带上。

图3 确定二进制编码过程
步骤三:对编码环带上的点进行仿射变换成圆。
步骤四:将该圆环带均分为360/(M×N)份(N为编码位数,M为编码位内份数),统计每一份中灰度值为255的像素个数与它的像素总数,对图2统计灰度值为255的像素个数结果如图3(a)。
步骤五:然后对统计结果进行量化处理,计算每一份中灰度值为255的像素个数与该份像素总数的比值,如果这个比值大于0.5,则量化为1,否则量化为0,量化结果如图3(b)。
步骤六:根据360/(M×N)个量化值,开始找编码环带解码的起始位置,如果某一位处于跳变点(0跳变为1,或1跳变为0)并且该点前后连续0的个数与连续1的个数都大于M/2,则认为它是该环带的解码起始位置。
步骤七:从该编码环带的解码起始位置开始,对这360/(M×N)个量化值依次进行每M位统计1的个数,如果1的个数大于M/2,则该位为1,否则为0,这样就得到了该靶标的N位二进制码,编码二进制数如图3 (c)。对得到的二进制码进行循环移位,将其中最小的二进制码转换为十进制数,作为最终的解码值。
3 实验结果与分析
为了验证本文算法,实验使用DALSAPiranha4线阵传感器(分辨率为8kpixel,线速率为50kHz)来获取不同场景下的靶标图像,靶标直径3.5cm,同时进行靶标的提取与解码实验。
验证本文图像增强算法的效果。对贴有106个靶标的实验架(长3m、宽1.2m、高2m)进行图像采集,镜头光圈F数设置为F4.0,曝光时间设置为100us,采集到的图像如图4(a),经过本文方法增强后得到图4 (b)。从图4(a)和图4(b)对比中,可以看到本文的方法通过调节图像灰度的动态范围,增强了局部对比度,同时达到了全局清晰的效果,图像有用信息得到增强,算法流程简单,有利于靶标的提取与解码。
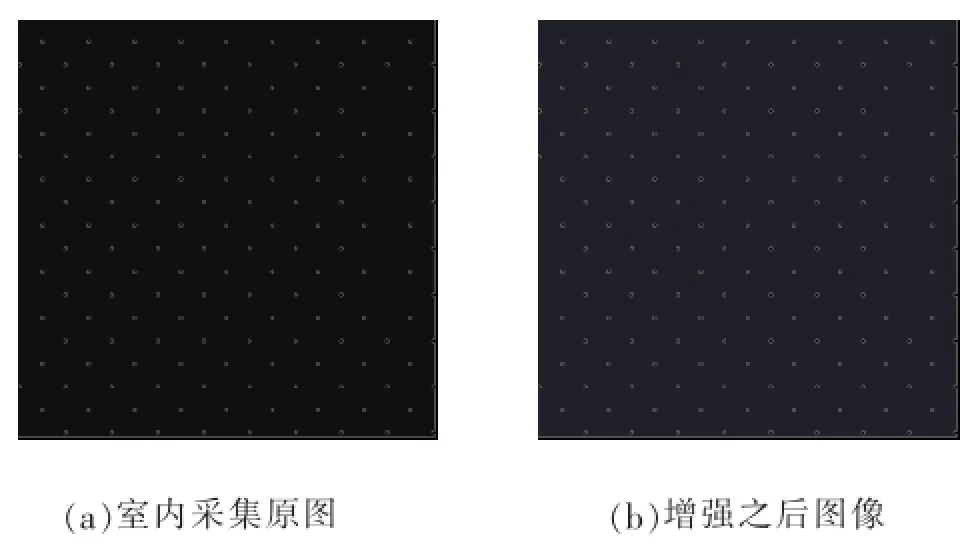
图4 图像增强效果对比图
验证本文快速局部二值化算法的效果。对图4(b)进行二值化得到图5(a),原图大小为8192x8192,平均处理时间小于0.2s,可以看到靶标架上的106个靶标前景与背景都很分明。其中二值化图像中局部靶标区域如图5(b),可以看到本文算法对图像进行二值化后,轮廓清晰,有利于靶标的提取与解码。

图5 二值化图
进行靶标提取与解码的验证。首先,考虑光照条件对靶标提取与解码的影响。同一条件下,镜头光圈F数分别设置为 F2.8、F4.0、F5.6、F8.0,曝光时间设置为100us,进行4×30次采集图像,其中在镜头光圈F4.0下,靶标提取结果如图6,所有靶标均被提取出来,且解码正确,并对120次实验下靶标提取与解码结果进行统计,得到了表2,在低照度情况下,通过本文方法,靶标的提取与解码有很高的准确率,即使在镜头光圈F8.0下,提取准确率也达到了 96.6%,同时解码准确率也有96.3%。综上,可以得出光照条件对本文算法的靶标提取与解码结果影响很小,实用性强。

图6 F4.0下靶标提取结果图

表2 不同F值下靶标提取与解码结果
考虑摄影距离对靶标提取与解码的影响。同一条件下,镜头光圈F数设置为 F4.0,曝光时间设置为100us,分别进行了3.5m、4.5m、5m、6m、7m、8m、9m距离的7×30次采集图像,其中在5m距离的靶标提取结果如图7,可以看到16个靶标完全提取出来,并且解码正确,并对210次实验下靶标提取结果进行统计,得到了表3,在7m的摄影距离下,即内圆直径10pixel以上,靶标提取与解码正确率接近100%,在8m以上的摄影距离下,也就是内圆直径9pixel以下,靶标提取与解码正确率开始下降。5m距离的中心亚像素中心坐标如表4。综上,本文的靶标提取与解码在中心圆直经10pixel以上,有接近100%的提取与解码正确率,并且中心定位到达亚像素精度。

图7 5m距离下靶标提取结果图
4 结语
本文提出了远距离高速采集下的靶标快速提取与解码算法。该算法优点主要有:第一,幂律变换与阈值截断进行图像增强,提高了低对比度图像靶标提取与解码的准确率;第二,利用灰度积分图像的快速局部二值化方法,有助于大面积光照不均情况下的靶标提取与解码;第三,对二值化图像进行连通区域提取与标记、边界跟踪提取轮廓,效果好且时间短;第四,提出了一种高准确率的解码方法。实验表明,本文算法对远距离、低照度、光照不均等情况下的靶标提取与解码有很强的实用性和鲁棒性。

表3 不同距离下靶标提取与解码结果

表4 靶标亚像素级中心坐标
[1]马扬腾,钟约先,郑聆.三维数据拼接中编码标志点的设计与检测[J].清华大学学报,2006,46(2):169-171,175.
[2][2]Schneider C T,Sinnreich K.Optical 3-D Measurement Systems for Quality Control in Industry[C].International Archives of Photogrammetry and Remote Sensing,1993:56-59.
[3][3]Forbes K,Vougt A,Bodika N.An Inexpensive,Automatic and Accurate Camera Calibration Method[C].Proceedings of the Thirteenth Annual South African Workshop on Pattern Recongnition,2002:1-6.
[4]AHN S J,RAUH W,RECKNAGEL M.Circular Coded Landmark for optical3D-measurement and Robot Vision[C].International Conference on Intelligent Robots arid Systems,1999:1128-1133.
[5]AHN S J,RAUH W.Circular Coded Target for Automation of Optical 3D-Measurement and Camera Calibration[J].International Journal of Pattern Recognition and Articial Intelligence,2001,15(6):905-919.
[6]SHORTIS M R,SEAUER J W,ROBSON S.Automatic Recognition of Coded Targets Based on a Hough Transform and Segment Matching[C].Proceedings of the International Society for Optics and Photonics on Electronic Imaging,2003:202-208.
[7]宋丽梅,陈昌曼,陈卓,覃名翠,李大鹏.环状编码标记点的检测与识别[J].光学精密工程,2013,21(12):3239-3247.
[8]苏新勇,黄雪梅,朱明健.数字近景工业摄影测量中标志点的识别与检测[J].制造业自动化,2014,36(5):31-35.
[9]戴相龙.三维非接触式测量中编码标志的研究与应用[D].西安电子科技大学,2014:17-29.
Proposes a fast target extraction and decoding algorithm for vision measurement.First,the image enhancement is performed by the power law transformation and threshold truncation method.Secondly,the contour is extracted to locate the target.Finally,the high resolution cutting method is used in the encoding band.Experimental results show that the average recognition accuracy is 96.3%,when the pixel number of the center circle is up to 10,the average recognition accuracy is close to 100%,and the center position is sub pixel accuracy. Keywords:
Image Enhancement;Local Binaryzation;Target Extraction;Target Decoding;Center Location
Fast Target Extraction and Decoding Method in Remote Visual Measurement
LI De-zhi1,TAO Qing-chuan1,HUANG Feng-ying2
(1.College of Electronics and Information Engineering,Sichuan University,Chengdu 610065)3.PLA of 78009,Chengdu 610066)
1007-1423(2016)03-0063-06
10.3969/j.issn.1007-1423.2016.03.015
李德志(1990-),男,湖北利川人,硕士研究生,研究方向为计算机应用与图像处理
陶青川(1972-),男,四川南充人,硕士生导师,副教授,研究方向为模式识别与智能系统
黄凤英(1978-),男,重庆璧山人,78009部队硕士工程师,研究方向为通信系统与信息处理
2015-12-21
2016-01-10
提出一种应用于视觉测量中的快速靶标提取与解码算法。首先,通过幂律变换与阈值截断方法进行图像增强、利用灰度积分图像进行快速局部二值化;其次,对二值图进行提取轮廓,应用最小二乘对轮廓进行椭圆拟合,并通过一系列筛选准则定位靶标;最后,对编码带采用高分辨率切割进行解码。实验结果表明,对于远距离、低对比度、灰度不均图像,平均准确率达96.3%,中心圆直径大于10pixel时,平均准确率接近100%,且中心定位达到亚像素精度。
图像增强;局部二值化;靶标提取;靶标解码;中心定位
