中压断路器触头系统的三维动态测试
2016-09-13邱才元刘向军
邱才元,许 雄,刘向军
(福州大学电气工程与自动化学院,福建 福州 350116)
中压断路器触头系统的三维动态测试
邱才元,许雄,刘向军
(福州大学电气工程与自动化学院,福建福州 350116)
目前对断路器触头的动态测试主要在一维和二维的基础上,只能单一反映断路器触头在主运动方向上的动态过程。为还原断路器触头系统的三维动作过程,利用一台高速摄像机与两面呈一定角度摆放的平面镜,设计基于虚拟双目视觉的三维测试系统,对ZN86A(VEB)-12型中压真空断路器的触头运动进行动态测试。通过特征点提取、立体匹配及三维重建获得触头的三维运动特性曲线,对三相触头运动过程进行分析。结果表明被测断路器触头在分合闸过程中存在左右和前后偏移运动且三相触头的偏移运动存在差异。三维测试结果可为断路器的优化设计和装配提供依据。
中压断路器;触头系统;动态特性;三维测试
0 引言
断路器作为电网的重要组成部分,在电网中起控制和保护作用。过去对断路器机械触头的动态测试主要集中在一维和二维的基础上,只能单一反映断路器触头系统在某一方向上的动态过程[1-4]。由于断路器触头系统等机械结构受产品设计、机械精度、人工安装等条件的影响,必然导致运动部件各点受力不均,使触头的动作以三维空间运动的形式呈现,在空间中产生偏移运动。而这些偏移运动将会增大断路器动作机构的机械磨损,影响断路器的工作性能和可靠性,降低使用寿命,严重时甚至会引起电力系统操作事故。因此,研究断路器触头系统的三维动态特性测试具有重要意义。
双目视觉技术是一种非接触式三维测量技术,具有速度快、准确度高等优点,在国内外发展迅速[5-9]。但是,传统的双目视觉技术在动态测试时同步性较差,而且采用多台高速摄像机大大提高了测试成本。虚拟双目视觉技术作为新兴的光学三维测试技术,解决了多台高速摄像机的同步性和高成本的问题[10-13]。如文献[14-15]采用虚拟双目视觉技术,实现了对磁保持继电器电磁机构的三维动态测量,解决了成本高和两台摄像机不同步的问题并验证了该方法的准确性,实验过程更简便。
因此,本文以ZN86A-12型中压真空断路器为测试对象,采用以虚拟双目立体视觉为原理的三维动态测试技术,在解决高成本和同步性的基础上,实现中压断路器触头系统动态过程快速、准确的三维测试。
1 虚拟双目视觉测量原理
虚拟双目视觉是在双目视觉的基础上发展起来的三维测试技术。相比于双目视觉技术测试时需要使用两台摄像机进行同步拍摄,虚拟双目视觉在双目视觉的基础上结合光学成像原理,只需使用一台摄像机便能完成对被测试物体不同空间信息的提取,实现被测试物体的三维测试。其原理如图1所示,基本方法是将两面互成一定角度的镜面摆放在物体后方,将摄像机摆放在物体的前方,调整位置和角度,使摄像机在两镜面中各自形成一个虚拟摄像机,在进行三维测试时,由这两台虚拟摄像机对物体进行拍摄。可以看出虚拟双目视觉系统在效果上等同于传统的汇聚式双目视觉系统,求取三维坐标的数学模型也基本相同。
虚拟双目视觉拍摄得到的图片是二维的平面图像,把采集到的一系列二维图片重建成空间中的三维图像需要建立相应的转换关系。因此,在进行三维重建之前需要先建立相应的摄像机模型,确定模型中各坐标系的转换关系,并通过摄像机标定求取摄像机的内外部参数。虚拟双目视觉建立的摄像机模型是对像点和与其相对应的空间点的映射关系的确定,该数学模型主要是由几个具有相应转换关系的坐标系构成,包括世界坐标系、摄像机坐标系和图像坐标系。摄像机模型坐标系间的变换关系如图2所示。

图1 虚拟双目立体视觉原理图

图2 摄像机模型坐标系变换关系

图3 虚拟双目视觉摄像机数学模型
将图1旋转180°,以虚拟摄像机为主视角观察空间点P,如图3所示,其结构组成与汇聚式双目视觉原理基本一致。
由传统的汇聚式双目视觉原理可得空间中任意一点P的坐标在世界坐标系和图像坐标系、摄像机坐标系之间的转换关系[14],如下式所示:

其中M为3×4的投影矩阵;f/dx和f/dy分别是u轴和ν轴上的尺度因子,也称为摄像机在u轴和ν轴上的归一化焦距;(u,ν)为P点在图像坐标系的像素坐标,单位为像素;(xw,yw,zw)为P点的空间坐标;Xw=[xwywzw1]T为P点的齐次坐标;f为摄像机焦距,(u0,ν0)为摄像机光轴与图像平面的交点,即像主点坐标;矩阵K为摄像机的内部参数,由f/dx、f/dy、u0、ν0等取决于摄像机内部结构的参数构成;R和T分别为旋转矩阵和平移向量,表示摄像机相对于世界坐标系的位置,称为摄像机的外部参数。因此,当确定P点在左右虚拟摄像机的像素点坐标 (u1,ν1)和(u2,ν2)后,将其分别代入式(1),可得:

以上两式整理后可得:

因此,根据式(2)便可求出空间任意点的三维空间坐标。
2 测试装置和测试方法
虚拟双目立体视觉系统由控制、采集、照明、成像和处理等部分组成,如图4所示。
采用pco.camera1200s高速摄像机作为图像采集系统的主体,该摄像机最大记录速度为820MB/s,分辨率为1280×1024,曝光时间为1μs~5s。两面角度可任意调节的平面镜组成成像系统,根据光学原理摆放好平面镜和断路器的位置,使得由高速摄像机和计算机等组成的图像采集系统能够清晰地从两面平面镜中获取被测中压断路器触头系统的标记位置所呈现的不同角度的镜像。利用由单片机组成的控制模块同时触发高速摄像机的摄像和断路器触头系统的动作,满足同步性要求。同时,为提高摄像机标定过程所得到参数的准确度,采用由带电子镇流器的导轨金卤灯组成的照明系统突显被测物体的轮廓和特征,将测量物体与背景环境分离开来;同时保证在摄像机标定过程中,标定板有足够的亮度以满足在摄像机中清晰成像的要求。采集得到满足要求的图像后,使用相应的图像处理软件和数据处理软件进行图像处理,再经过三维重建后获得中压断路器触头系统的三维动态特性,还原其三维动态过程。本文以ZN86A-12型中压真空断路器为对象,研究其触头系统的三维动态特性。由于该型号的断路器触头处于密封的真空泡中,无法直接对触头的动作过程进行检测;因此,采用在断路器三相极柱套筒底部各开一个小口的方式,在各相的绝缘支撑件处粘贴正方形白纸黑心圆标记点进行标记。因为触头和绝缘支撑件是一个整体,标记点和触头的运动情况相同,所以可以通过检测黑心圆标记点的运动过程,来间接获取触头的实际运动过程。开口的极柱套筒、绝缘支撑件和标记点如图5所示。
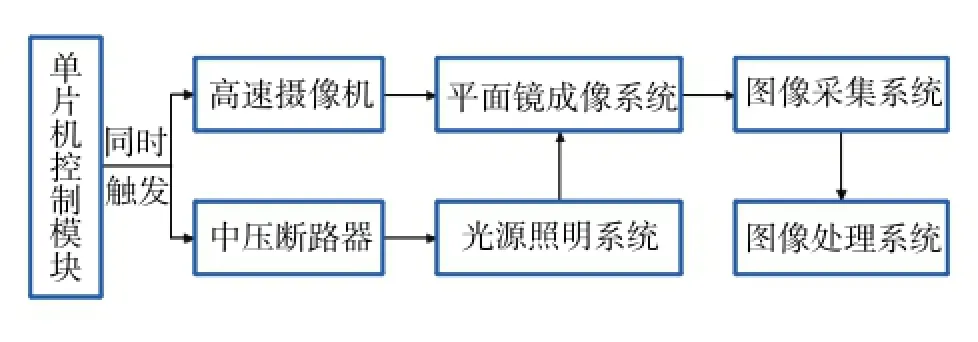
图4 虚拟双目视觉系统
图中坐标系OXYZ表示标记点运动坐标,其中X轴表示前后运动,向前为正运动方向;Y轴表示上下运动,向下为正运动方向;Z轴表示左右运动,向右为正运动方向。

图5 标记点位置
3 断路器触头系统三维动态特性测试
将断路器固定在安装柜体上,确定高速摄像机和平面镜的位置,使得断路器的标记点在左右两面平面镜中清晰成像。然后,调节高速摄像机的光圈和焦距,使得图像采集系统能够采集到清晰、完整的标记点。
3.1高速摄像机的标定
为了将摄像机拍摄得到的二维图像坐标换算成三维世界坐标,需要对式(1)中的摄像机内部参数K和外部参数R、T进行标定。本文利用张正友标定法[16]进行标定,基本思路是:假定标定板位于世界坐标系Z=0的平面,由此得到标定板平面与图像平面之间的映射矩阵,通过对标定点所选取的数学模型进行分析得到摄像机参数的初始估计值,最后利用迭代算法通过优化函数对参数求精。标定板经图像采集系统得到的图像如图6所示。
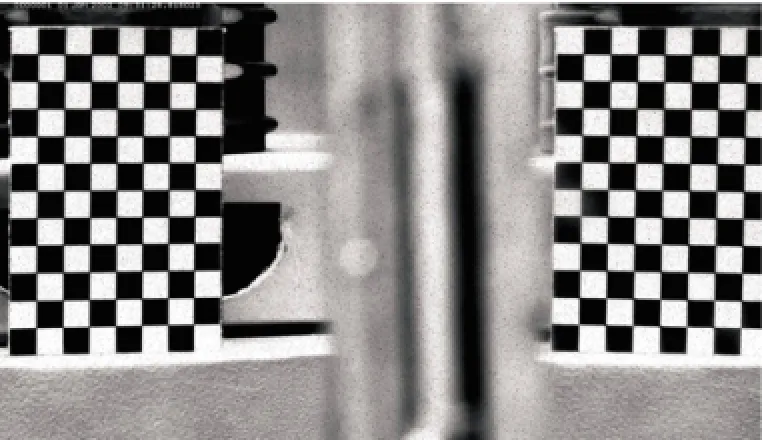
图6 摄像机标定
拍摄得到多张标定板摆放角度不同的标定图片后,根据张正友标定法可求得左右虚拟摄像机的内部参数:

为了得到高速摄像机的外部参数,需要确定一个世界坐标系。将标定板与标记点平行放置,拍摄得到标定图片后,选取标定板上的坐标系作为世界坐标系。并且将世界坐标系定义在左虚拟摄像机坐标系下,即假设世界坐标系与左虚拟摄像机坐标系重合,因此需将右虚拟摄像机坐标系下的坐标归算至左虚拟摄像机坐标系下。求得左右虚拟摄像机的外部参数如下:


其中R1、R2分别为左、右虚拟摄像机的摄像机坐标系相对于世界坐标系的旋转矩阵,T1、T2分别为左、右虚拟摄像机的摄像机坐标系相对于世界坐标系的平移向量。
根据求得的R1、R2、T1、T2进一步求出右虚拟摄像机相对于左虚拟摄像机的旋转矩阵R和平移向量T:

3.2断路器触头运动过程的图像采集
在断路器触头系统运动过程的图像采集中,为更准确地分析触头系统的动态过程,要求在运动时间内拍摄足够多的标记点图像,这也意味着需尽量减小每相邻两帧图像之间的曝光时间。摄像机的曝光时间与成像平面的大小呈正比关系,因此需在保证标记点能够完整地呈现在成像平面上的前提下,尽量减小成像平面的大小;本文设置成像平面为窄长条形,高速摄像机拍摄速度为212 μs/帧,拍摄得到的部分图像如图7所示。

图7 标记点运动过程的部分图像
3.3标记点的坐标提取
拍摄到图片中标记点的成像作为图像的特征点,由于它们是同一个标记点的成像,因此这两个特征点在空间上符合立体匹配的要求。经过图像处理后提取左右两个特征点的圆心坐标,将其代入式(2)就可以得到标记点的三维空间坐标。
4 三维重建与结果分析
断路器触头系统的动作包括分闸运动和合闸运动,本文采用虚拟双目立体视觉测量系统采集ZN86A-12型中压真空断路器三相触头的动作过程,三维重建后得到如图8~图10所示的结果。图中Y轴曲线为断路器运动过程的主运动方向特性曲线,即触头上下运动的行程曲线;X轴曲线是断路器前后运动方向的特性曲线;Z轴曲线是断路器左右运动方向的特性曲线。

图8 A相触头动态特性曲线
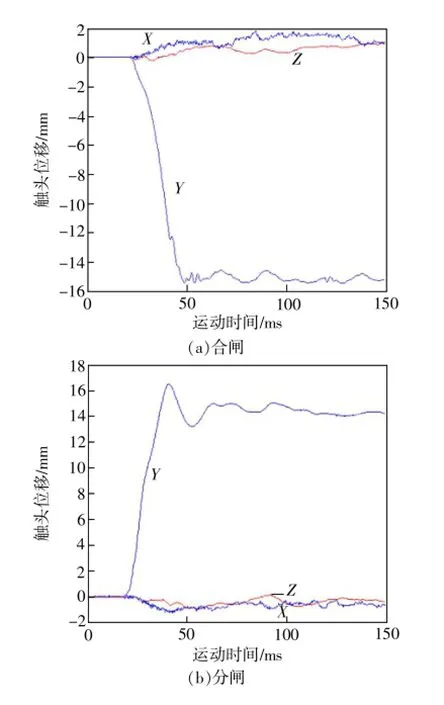
图9 B相触头动态特性曲线

图10 C相触头动态特性曲线
从图中曲线可以看出,触头运动过程中,三相的主运动方向即Y方向运动的情况大致相同,且在X方向和Z方向均存在偏移运动。从Y轴曲线可以看出,触头的开距约14 mm,合闸动作时间约26 ms,分闸动作时间约18ms。合闸时,A相触头存在X方向的负向运动,Z方向的正向运动,即A相触头存在向后和向右偏移,且向后的最大偏移量为1.32mm,向右的最大偏移量为0.88 mm;B相触头存在向前偏移和向右偏移,向前的最大偏移量接近2 mm,向右的最大偏移量为0.93mm;C相触头存在向前偏移且最大偏移量为1.54mm,左右偏移量较小。分闸时,A相触头在X方向为正向运动,Z方向为负向运动,即存在向前和向左偏移且向前最大偏移量为0.98mm,向左最大偏移量为0.47mm;B相触头向后和向左偏移,向后的最大偏移量为1.12mm,向左的最大偏移量为0.8mm;C相触头只发生了微小的偏移运动,向前的最大偏移量为0.71mm,且最终基本回到原来位置。
从上述分析可知,被测断路器三相触头在左右和前后偏移的运动过程存在明显差异,且并非同时向同一个方向作偏移运动,说明并不是操作机构连杆运动导致的,而是触头本身的运动或者是固定触头的绝缘支撑件的运动引起的三相触头运动的不一致性。这可能是由于三相触头系统或绝缘支撑件加工或装配过程各零部件之间公差配合的差异,导致三相触头在运动过程中偏移幅值和方向有所不同。
5 三维测试方法验证
为了验证上述三维测试结果的准确性,本文利用魔方对该虚拟双目视觉测量系统进行精度考量。对魔方上A、B、C、D 4个点,首先利用Image-Pro Plus软件提取其像素坐标,分别代入式(1)得到对应点的世界坐标,通过对这4个点的三维重建结果与实际的距离对比可得到重建的精度。表1为通过Image-Pro Plus软件提取的左右图像像素点坐标与三维重建出来的世界坐标,表2为三维重建计算出来的距离与实际的距离对比。

表1 像素坐标与重建坐标

表2 重建距离与实际距离
表中可以看出,重建结果最小相对误差为0.0789%,而最大误差为2.734%,误差大小在可接受范围之内。双目视觉重建误差来源主要有标定误差与特征点提取误差,这些误差主要来源于标定板的制作、标定准确度、特征点提取准确度等。
6 结束语
本文提出了一种中压真空断路器触头系统动态特性的三维测试技术,采用基于虚拟双目立体视觉的测量方法对中压真空断路器触头系统的动作过程进行了三维测试,绘制出了中压真空断路器三维动态曲线,该曲线可真实全面地反应出断路器触头系统的动态过程,测试结果可以为断路器结构优化设计和装配工艺的改进提供依据。
[1]吴忠良.高压断路器在线监测技术进展[J].电气开关,2011 (1):1-3.
[2]宋建新,刘凤丽.真空断路器机械特性参数测量及验证[J].沈阳农业大学学报,2002,33(5):380-382.
[3]陈建平,胡占强,苏晓东.智能化断路器机械特性在线监测关键技术设计[J].高压电器,2014(4):20.
[4]黄兴泉,王伟,张欲晓,等.断路器机械特性的高速摄像法检测[J].华北电力大学学报,2011,38(5):43-47.
[5]孙祥一,胡建,王鲲鹏,等.高速摄像三维图像分析技术与应用[J].宇航计测技术,2010,30(6):30-34.
[6]史瑞根.视差法射线图像检测系统的模型及误差分析[J].国外电子测量技术,2008,27(12):4-6.
[7]张元元,张丽艳,杨博文.基于双目立体视觉的无线柔性坐标测量系统[J].仪器仪表学报,2010,31(7):1613-1619.
[8]杨丽娜.基于双目视觉的机动目标跟踪方法研究[D].洛阳:河南科技大学,2009.
[9]NIT,ZHANGH,XU P,et al.Vision-based virtual force guidancefortele-robotic system[J].Computers& Electrical Engineering,2013,39(7):2135-2144.
[10]张瑞峰,张巍.改进双目视觉在柴油机缸盖毛坯检测中的应用[J].电子测量技术,2011,34(8):48-51.
[11]CHEN CL,TAI C L,LIO Y F.Virtual binocular vision systems to solid model reconstruction[J].The International Journal of Advanced Manufacturing Technology,2007 (35):379-384.
[12]YIS,AHUJAN.Anomnidirectional stereo vision system using a single camera[C]∥The 18th International Conference on Patten Recognition.IEEE,2006:861-865.
[13]张恒康,何玉明,张耿耿,等.一种单摄像机测量三维运动轨迹的方法[J].固体力学学报,2010(31):171-176.
[14]兰太寿,李炜荣,刘向军.基于虚拟双目视觉的电器电磁机构三维动态测试研究[J].电子测量与仪器学报,2014,28 (1):29-35.
[15]刘向军,许雄,兰太寿.电磁机构三维动态特性测试及数据处理与分析[J].仪器仪表学报,2014,35(10):2208-2215.
[16]ZHANG Z.A flexible new technique for camera calibration[J].Pattern Analysis and Machine Intelligence IEEE Transactions,2000,22(11):1330-1334.
(编辑:莫婕)
Three-dimensional dynamic test for the contact system of medium voltage circuit breaker
QIU Caiyuan,XU Xiong,LIU Xiangjun
(College of Electrical Engineering&Automation,Fuzhou University,Fuzhou 350116,China)
The contact movement of the circuit breaker is a process that occurs in threedimensional space.In the past,the dynamic tests of circuit breaker contact mainly focus on one or two dimension test,which only reflects dynamic process in the main movement direction of circuit breaker contact.In order to restore the three-dimensional movement of circuit breaker contact system,a three-dimensional test system based on virtual binocular vision is designed.It consists of a high speed camera and two plane mirrors with certain angle.The dynamic test of the contact movement of the medium voltage vacuum circuit breaker ZN86A(VEB)-12 is carried out. By extracting feature points,stereo matching and 3D reconstruction,the movement characteristic curves of the contacts are obtained and the movement processes of three phase contacts are analyzed.The results show that the left-right and front-back offset motion of the contacts are found during the on-off process of the tested circuit breaker and the offset motion of three phase contacts differs from each other.The three-dimensional test results will provide basis for the optimum design and assembling for the circuit breaker.
mediumvoltagecircuitbreaker;contactsystem;dynamiccharacteristic;threedimensional test
A
1674-5124(2016)08-0033-06
10.11857/j.issn.1674-5124.2016.08.007
2015-10-23;
2015-12-02
福建省自然科学基金项目(2013J01177)
邱才元(1989-),男,硕士研究生,专业方向为智能电器及在线监测技术。