三轴飞行仿真转台控制系统设计
2016-09-08路平,刘凯,王龙
路 平, 刘 凯, 王 龙
(军械工程学院 无人机工程系,河北 石家庄 050003)
三轴飞行仿真转台控制系统设计
路平, 刘凯, 王龙
(军械工程学院 无人机工程系,河北 石家庄 050003)
为实现转台的高精度控制,设计了转台数字控制系统。该控制系统以MSP430单片机为控制核心,采用模块化的设计理念和开放式的结构形式,设计了转台控制系统的硬件电路,并对其功能和原理进行了论述。以VC++6.0为开发环境,设计了控制系统的上位机软件结构;以IAR EW 5.0为开发环境设计了控制系统的下位机软件结构。为验证控制系统的性能,进行了控制实验,结果表明:系统控制效果良好,达到了预期效果。
三轴转台; 控制系统; 硬件电路; 软件设计
0 引 言
三轴飞行仿真转台是一种在航空、航天等领域中进行模拟、仿真、测试等相关实验的半实物仿真设备,可以通过对三个框架实施不同的运动,模拟飞行器在空中的各种飞行动作和姿态变化,军事和民用价值日益突出。转台的内、中、外三个框架分别模拟飞行器的滚转、俯仰、偏航运动[1]。
超低速、宽调速、高频响、高精度是仿真转台最重要的技术指标,设计合理的控制系统是实现转台技术指标的关键,关系到仿真结果的优劣[2]。转台控制系统作为转台系统的核心部件,主要用于控制转台转动,实现转台的飞行仿真功能。
本文设计了一种基于MSP430单片机的转台数字控制系统,从硬件设计、软件设计和系统调试与转台控制实验三个方面对搭建的转台数字控制系统进行了较为详尽的阐述。通过数字控制器实现对转台的闭环控制,控制策略采用软件程序实现,具有结构简单、控制精度高、抗干扰能力强、可靠性高等特点,控制效果良好。
1 控制系统的结构设计[3~6]
转台控制系统的设计思路是采用人机交互界面的形式,实现转台指令的收发以及转台的检测;通过下位机即转台的数字控制器实现对转台的高精度控制。
该系统采用图1所示的闭环控制结构,以MSP430单片机为核心处理芯片,采用PC和单片机组成的集散型控制方式。
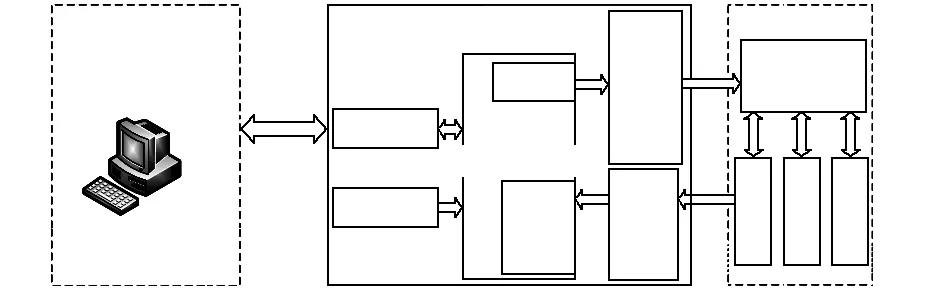
图1 转台控制系统总体结构图
转台控制系统主要由以下四部分组成:
1)上位机软件平台:提供人机交互界面、完成用户指令的响应、工作参数的设定、数据的实时采集和保存。
2)下位机控制器:接收上位机的控制指令、驱动转台运动、采集转台位置和速度信息、向上位机传递转台运行状况等。
3)光电编码器:转台的角度测量系统,与伺服电机同轴相连。光电编码器输出的脉冲经过信号处理电路回传到单片机中,构成转台位置和速度的双闭环控制回路,提高了转台的控制精度。
4)伺服系统:作为转台的执行机构,根据单片机的控制信号,驱动转台运动,实现转台的飞行仿真功能。
上位机通过串口与单片机通信,向单片机发送控制指令;单片机根据接收的控制指令,输出脉宽调制(PWM)信号,驱动无刷直流电机(带动转台各轴)运动,实现对转台的实时控制;同时,光电编码器通过转台的转动得到脉冲信号,经信号处理电路处理后,输入到单片机的定时/捕捉模块进行处理;最后,单片机将捕捉的转台位置、速度信息与控制指令比较,检测转动角度与设定值的差距,调整PWM占空比或发出刹车指令,实现转台的闭环控制。
2 系统硬件平台设计
2.1处理器选型[7]
MSP430F149是美国TI(德州仪器)公司推出的一种16位超低功耗、具有精简指令集的混合信号处理器。该单片机能在25 MHz晶体的驱动下,实现40 ns的指令周期。针对实际需求,将多个不同功能的模拟电路、数字电路模块和微处理器集成在一个芯片上,在工业控制、智能化仪器仪表、电器产品、计算机网络与通信以及计算机外部设备等领域应用广泛。
2.2直流无刷电机驱动器及应用
本系统采用DBLS—01—5A型号的直流无刷电机驱动器,以单轴转台为例,驱动器及其端口连接如图2所示。
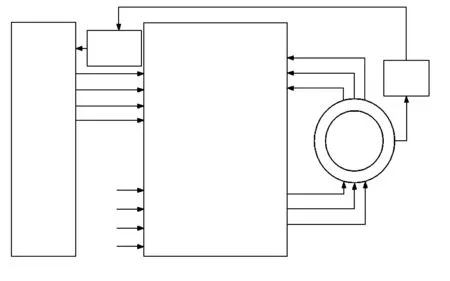
图2 驱动器及其端口连接示意图
除电源外,直流无刷电机驱动器端口共有三类信号,即电机驱动信号、三相霍尔换向信号和电机控制信号。各部分信号的具体功能如下[8,9]:
1)电机驱动信号MA,MB,MC为直流无刷电机提供相位互差120°电角度的方波信号,产生电磁转矩,驱动电机转子转动。
2)三相霍尔换向信号HA,HB,HC为电机霍尔传感器产生的三相换向输出信号,用于直流无刷电机的换向。
3)电机控制信号分为转向控制信号F/R,使能控制信号EN,刹车控制信号BR,转速控制信号SV。F/R为数字信号,低电平有效,由单片机P2.0口对其控制;EN为数字信号,低电平有效,由单片机P2.1口对其控制;BR为数字信号,低电平有效,由单片机P6.1口对其控制;SV为模拟信号,输入电压为0~5 V,由单片机P4.1输出PWM信号,经积分后产生0~5 V模拟信号,调节电机转速。
2.3电源供电电路设计
电源供电电路主要用于向单片机、直流无刷电机、直流无刷电机驱动器和片外I/O端口等提供能源。转台控制系统需要24,5,3.3 V的直流电。其中3.3 V电源对MSP430单片机片内系统及部分外围器件供电;5 V用于向片外I/O端口和直流无刷驱动器中的霍尔信号供电;24 V用于向直流无刷电机和直流无刷电机驱动器供电。
系统所用电源由开关电源提供,得到+24 V和+5 V的直流电,再由ASM1117芯片将+5 V电压转换为+3.3 V 电压,供单片机使用。
2.4PWM信号隔离电路设计
为避免电机启动时冲击电流的影响,提高转台控制系统的可靠性,需要对MSP430单片机输出的PWM信号进行隔离。单片机的供电电源由ASM1117芯片转换得到,当采用光电耦合进行信号隔离时,工作电流过大,供电能力不足,且需要大量的电阻和电容配合工作,使得电路板体积增加,功耗增大,电磁兼容性下降。本系统采用ADI公司的iCouple系列数字隔离器,将CMOS与芯片级变压器技术相结合,克服了上述缺点[10]。
本系统采用一片ADum1400实现了3路PWM输出信号的隔离,PWM信号隔离电路如图3所示。
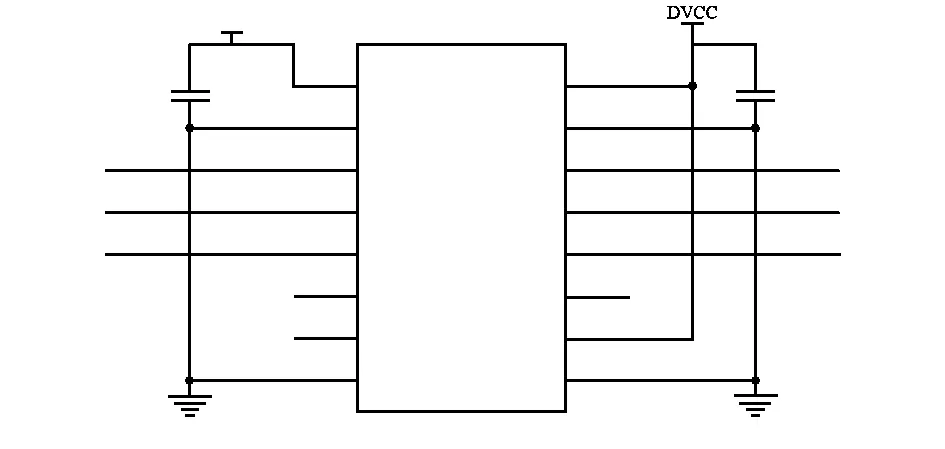
图3 PWM信号隔离电路
2.5通信模块设计
单片机与上位机之间需要进行有效通信,以保证转台的控制信号和状态信息的传输。由于单片机TTL电平为3.3 V,而RS—232串口为12 V电平,为实现单片机与上位机的正常连接,需要进行电平转换。
本系统采用MA2323芯片进行TTL/RS232电平转换,将MSP430的异步收发模块引脚接到MA2323芯片的R1OUT/T1IN引脚,经电平转换后与PC机串口连接,用于单片机与上位机之间的通信。其结构原理图如图4所示。
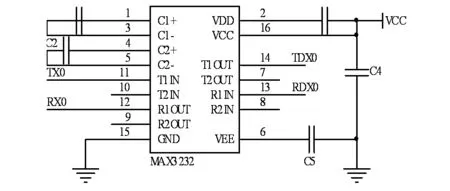
图4 通信模块电路图
3 软件功能设计
转台控制系统软件是转台系统正常运转的关键技术之一,其设计是否合理直接影响到整个系统的功能[11]。
转台控制系统的软件设计分为上位机软件设计和下位机软件设计两部分。
3.1上位机软件设计[12]
本系统中,上位机采用PC机,用于提供用户接口,配置系统控制参数、处理和存储转台运行轨迹参数,实现良好的人机交互功能。
根据上位机的任务要求,转台上位机软件采用模块化的设计思路,其各功能模块如下:
1)人机交互模块:用于提供给用户一个输入运动参数和配置信息的接口,接收用户的控制信息,传递到硬件接口,进而传递给单片机系统。
2)状态显示模块:将接收到的转台实时信息(经数据处理模块处理后的信息)进行反编译,然后在上位机终端上显示出来。
3)数据处理模块:主要用于对控制指令进行编译,采用帧格式的形式传递给单片机,同时将从单片机接收到的数据解算,传递给状态显示模块。
其特点如下:友好的交互式人机界面,方便用户操作。开放式的软件结构,便于功能的扩展和控制器参数的修改。强大的数据处理功能,可以实现数据的采集、编译、存储,提供一个功能齐全的集成环境。
3.2下位机软件设计
下位机软件是转台系统的控制软件,用于执行控制策略,驱动转台运动。其主要任务是:和上位机之间进行通信,控制指令和测量元件数据的接收、采集、处理,控制算法的实现等。根据任务要求,单片机下位机软件应具有以下功能[13]:
1)初始化系统:完成系统数字资源的配置和寄存器的设置、转台各轴框初始状态的确定等。
2)通信功能:检测接收到的上位机传送的数据包是否为合法指令,若数据包合法,接收数据包,否则丢弃;同时,将检测到的转台状态信息打包,传送给上位机。
3)监测功能:下位机软件对转台的运行状态进行监测,一旦发生故障及时报警和故障处理,同时发出刹车信号,使转台停止运转,避免损坏伺服电机。
单片机程序通过IAR EW 5.0开发环境用C语言编写,并通过下载电缆从JTAG口下入单片机芯片内部。
下位机的整个程序流程图如图5所示。
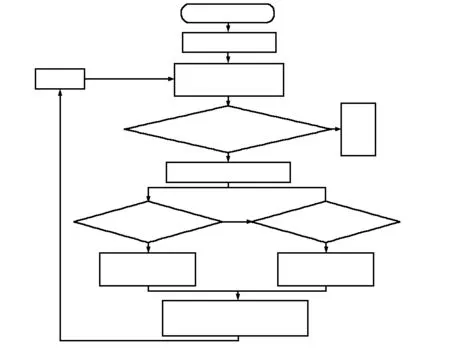
图5 下位机程序流程图
4 控制系统实验验证
4.1软件开发平台
在控制系统上位机软件设计中,使用了Visual C++ 6.0软件集成开发环境,建立基于对话框的应用程序[14]。将各控件移至对话框中,构成上位机控制界面框架。上位机控制界面如图6所示。
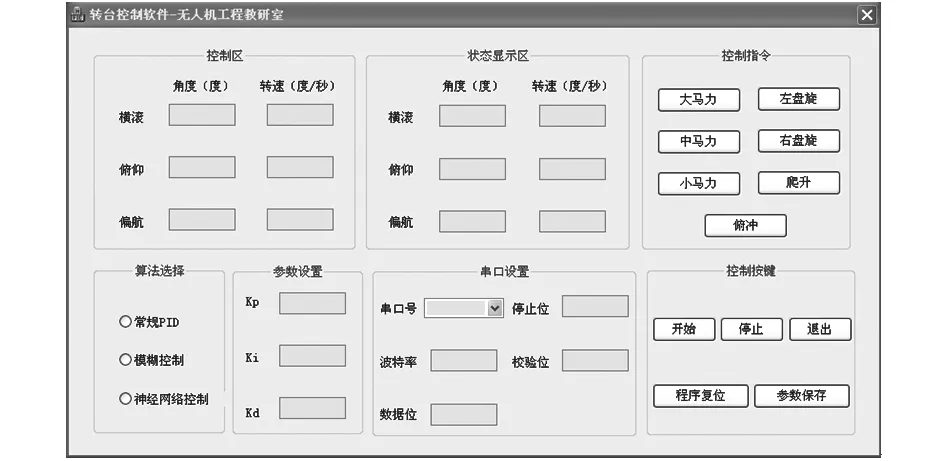
图6 上位机调试软件
在下位机软件开发过程中使用了IAR EW 5.0开发环境。IAR EW是由IAR公司提供的嵌入式系统开发工具,该嵌入式工作平台开发环境为开发不同的处理器项目提供了强有力的开发环境。新建工程项目,选择C语言进行编程 ;然后进行编译、链接、调试;最后,利用MSP430—BSL下载器进行程序下载和在线调试。
4.2系统调试
系统调试分为三个阶段,依次为硬件调试、软件调试和软硬件联调。硬件调试包括电源电路、最小系统、直流无刷电机驱动器以及光电编码器信号反馈电路等的调试。软件调试包括上位机软件和下位机软件的调试。上位机软件调试主要检测通信模块是否正常,通信协议是否正确,反馈转台参数与实际是否一致;下位机软件调试依托硬件电路,主要检测各功能模块是否正常工作,控制算法流程是否正确等,按照先局部后整体的思路进行。软硬件联调包括参数标定和各参数调试等内容,其最终目的是使整个转台控制系统正常、稳定工作,实现转台的高精度控制。
如图7所示为软硬件联调中对PWM占空比的调试。占空比依次为25 %,50 %和75 %,频率为1 kHz。
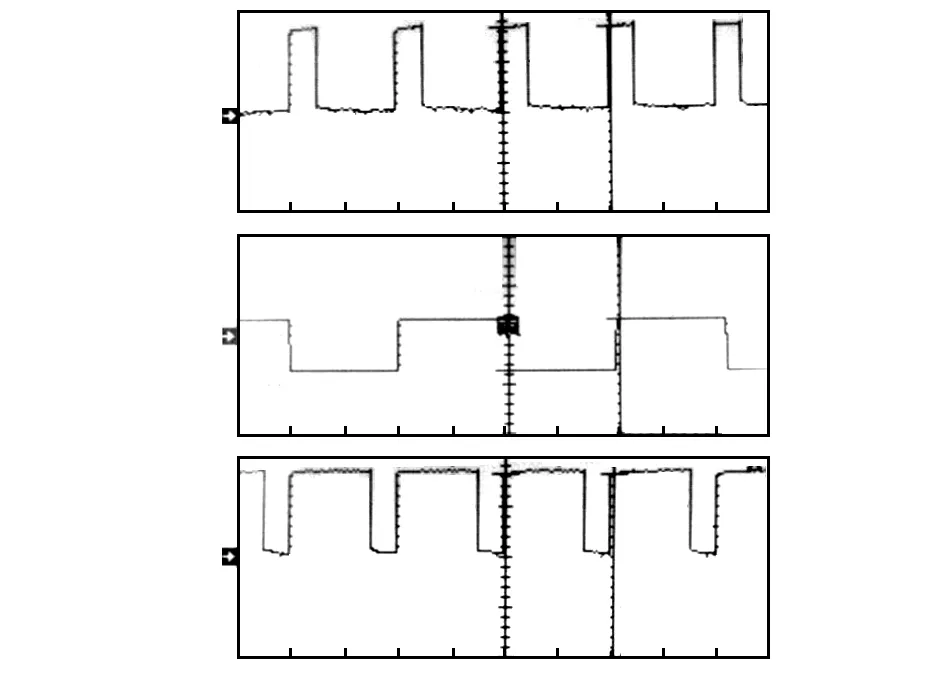
图7 软硬件联调PWM占空比变化图
4.3转台控制实验
转台控制系统的软硬件调试的设计与实现以及系统调试为转台控制实验打下了基础。为验证控制系统的效果,实验采用单轴测试的方式进行。以偏航控制转台轴框为控制对象,验证上位机、下位机以及硬件系统的工作状态。表1为转台控制系统测试实验数据。
由于某些原因,转台产生误差必不可免。分析可知,转台控制系统产生误差的主要原因是:
1)信号调理电路在整定光电编码器反馈的脉冲信号时,使得部分脉冲缺失,单片机捕捉的脉冲数与实际值不符。
2)转台轴框装配存在误差。
3)由于电机转动时存在惯性,单片机发出刹车信号后,电机会继续转动一定角度。
4)单片机部分中断过程中存在脉冲计数缺失。
根据转台系统产生误差的原因,后续工作中将对其进行部分改进,减少误差率,提高控制精度。
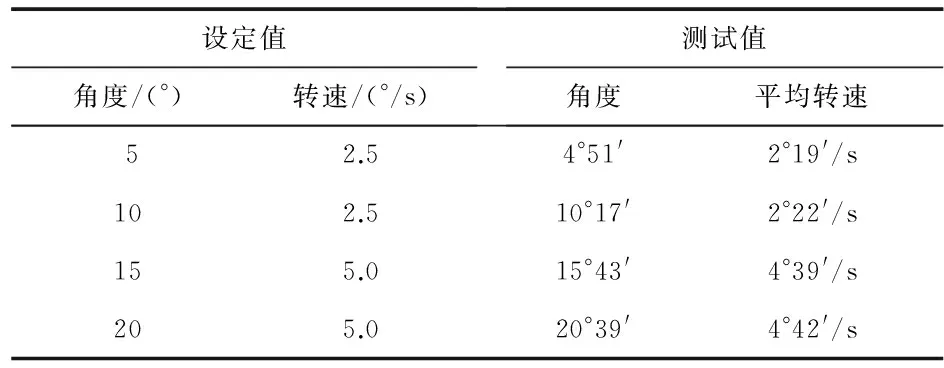
表1 转台控制系统测试实验数据
5 结 论
本文以三轴飞行仿真转台为研究对象,基于MSP—430单片机,设计了一种数字控制器,对转台进行闭环控制。对于控制系统的设计,在满足系统各种功能要求的前提下,严格遵循OMC(开放式体系结构控制器)的设计理念。根据对系统功能和任务要求,设计了硬件平台;为实现数字控制,设计了控制系统的上位机和下位机软件,并对其功能和原理进行了论述。本文设计的转台数字控制系统具有结构简单、控制精度高、抗干扰能力强、可靠性高等特点,经过实验操作验证,该系统稳定可靠,控制效果良好。
[1]王本永,赵存友,董彦良.液压三轴仿真转台计算机控制系统的设计[J].山东科技大学学报,2011,30 (2):86-89.
[2]柴晓辉.三轴转台伺服系统设计[D].哈尔滨:哈尔滨工程大学,2007.
[3]杨玉含,周召发,孙立江,等.基于闭环控制的自动转位系统设计[J].仪表技术,2011(5):13-15.
[4]刘广森,王新民,赵凯瑞.基于CPLD的三轴转台姿态信号测量板卡的设计[J].计算机测量与控制,2010,18(2):303-306.
[5]代杰,樊瑜瑾,张学丽,等.基于单片机的光电编码器位置检测系统设计[J].计算机测量与控制,2011,19(1):17-19.
[6]王晓东,董新民,姚崇.基于xPC的飞行控制系统半实物仿真设计[J].传感器与微系统,2011,30(2):122-124.
[7]谢兴红,林凡强,吴雄英.MSP430单片机基础与实践[M].北京:北京航空航天大学出版社,2008.
[8]孟凡菲,王文君,俞竹青.基于DSP2812无刷直流伺服电机控制系统的设计[J].煤矿机械,2009,30(12):138-140.
[9]陈志佳,孙书鹰,张炜栋.三相直流电机伺服系统设计[J].自动化仪表,2012,33(1):44-47.
[10] 何环飞.四旋翼无人直升机飞行控制系统的设计与研究[D].南京:南京理工大学,2009.
[11] 朱晓明,徐岩,谢韶旺,等.七自由度测试转台的控制系统设计[J].计算机测量与控制,2010,18 (11):2530-2532.
[12] 董海瑞,高连生.三轴转台上位机控制软件研究[J].工业控制计算机,2007,20(12):52-55.
[13] 刘文佳.基于PMAC的三轴仿真转台系统研究[D].哈尔滨:哈尔滨工程大学,2008.
[14] 许波,李正明,殷春芳.精密转台伺服控制系统的研究[J].自动化技术与应用,2004,23(10):16-18.
王龙,通讯作者,E—mail:271728545@qq.com。
Design of three-axis flight simulation turntable control system
LU Ping, LIU Kai, WANG Long
(Department of Unmanned Aerial Vehicle Engineering,Ordnance Engineering College,Shijiazhuang 050003,China)
In order to implement high precise control of turntable,a digital control system for turntables is designed.The coutrol system takes microprocessor MSP430 as control core,use modularization design idea and open-ended structure form,design hardware circuits of turntables control system and discuss its functions and principle. Using VC++6.0 as development environment,design software structure of upper computer;using IAR EW 5.0 as development environment, design software structure of lower computer of control system.In order to validate performance of control system,control experiment is carried out,results show that control effect of system is good and achieves expected effect.
three-axis turntable; control system; hardware circuit; software design
10.13873/J.1000—9787(2016)09—0110—04
2015—10—28
TP 273
A
1000—9787(2016)09—0110—04
路平(1961-),男,河北邯郸人,教授,硕士生导师。研究方向为通信与信息系统。