基于北斗终端的室内外无缝定位系统设计
2016-08-18江城
江 城
(空军装备研究院,北京 100094)
基于北斗终端的室内外无缝定位系统设计
江城
(空军装备研究院,北京 100094)
针对当前室内外无缝连续定位问题,基于北斗空间导航信号特征,并结合WLAN室内定位中的RadioMap的思想,提出了一种基于北斗终端的室内外无缝导航定位系统,使现有的北斗导航终端只需要经过软升级,即可实现室内外无缝定位。仿真结果表明,在空旷室内环境与复杂室内环境下,均达到了2 m的定位精度(1σ),且在室内外过渡中保证了定位的连续性。本系统为解决北斗导航系统全域覆盖问题提出了一种可行的技术思路。
北斗卫星导航系统;室内外无缝定位;指纹节点;互相关干扰
0 引言
在室外环境下,卫星导航系统已经可以提供令人满意的位置服务,我国北斗卫星导航系统也已经实现了区域连续服务;在室内环境下,已经有诸如UWB定位[1]、Wifi定位、Zigbee定位和组合定位[2]等技术,但这些定位方法并未消除室内和室外之间存在的“定位缝隙”。且由于室内环境的复杂性,单纯依靠三角学计算的定位手段受到极大制约,而指纹定位技术则被认为是室内定位技术的发展方向[3]。
针对以上问题,结合现有的北斗定位技术和室内指纹定位技术提出了一种北斗指纹室内外无缝定位方案,使用户可以使用北斗终端同时获得室内外环境下的连续定位服务。该方案中,将北斗导航信号进行了改造设计,并由室内节点发射。用户终端在室外环境下仍使用北斗卫星信号进行定位,而在室内环境下,则通过指纹定位的方式获得位置信息。由于室内节点发送的信号在物理层上与北斗信号兼容,用户接收机并不需要增加额外的硬件设备,便可平滑、无缝地在室内外定位服务间切换和过渡。
1 北斗室内外无缝定位系统设计
北斗卫星导航定位系统是中国自主研发和运营的全球卫星导航定位系统,其在室外环境下可以为用户提供可靠的导航定位服务。但是作为星基导航定位系统,北斗系统与GPS、GLONASS等系统一样,在地下停车场等室内环境下系统性能会急剧恶化甚至无法使用[4-5]。
针对这个问题,结合IMES系统中的指纹节点和WLAN室内定位中的RadioMap的思想,设计了一种北斗室内外无缝定位系统。北斗无缝定位系统基本构架如图1所示,系统主要由北斗导航卫星、室内北斗指纹节点以及升级后的北斗用户终端3部分组成。当用户在室外时利用北斗卫星进行定位,而进入室内后利用指纹节点进行定位[6]。无论是室内还是室外,用户都使用同一北斗接收机,无需切换不同体制的接收机,接收机会自动判断接收的是卫星信号还是北斗指纹节点信号,并利用相应的定位算法对用户进行定位,真正实现无缝定位。
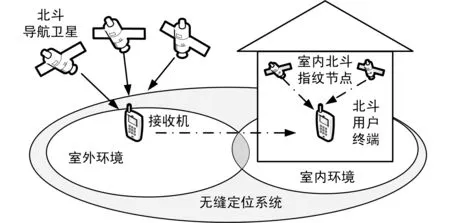
图1 北斗无缝定位系统基本架构
由于室内外定位以及室内外过渡切换时均采用同一北斗终端,则需要解决室内北斗指纹信号的设计、终端定位方法和室内外信号互相关干扰等核心问题[6]。
2 北斗室内外无缝定位关键技术
2.1北斗指纹节点信号设计
北斗指纹节点是安置在室内的一种简易的北斗信号发生器,接收机在室外接收北斗卫星发射的信号完成导航定位,进入室内后将利用北斗指纹节点发射的信号实现室内定位功能。
为保证室内外无缝定位能够在同一接收机上实现,室内节点的发射信号必须在射频上与北斗卫星信号保持一致[7]。在本设计中,室内节点信号的射频规范参照《北斗卫星导航系统空间信号接口控制文件公开服务信号B1I(1.0版)》(以下简称“北斗ICD”)设计。室内节点信号使用B1频点,仅包含B1信号中的I路信号,采用BPSK调制,其表达式为:
Sj(t)=ACj(t)Dj(t)cos(2πf0t+φj)。
(1)
式中,上角标j为室内节点编号;A为信号振幅;C为测距码;D为测距码上调制的数据码;f0为载波频率;φ为载波初相[8]。
为保证大多数现有的北斗接收机能够兼容室内节点信号,室内节点信号的偏移程度不应超出接收机射频器件的通带,因此本文将以北斗卫星信号所能达到的最大多普勒频移作为室内节点信号的中心频率的偏移量。
在室内指纹定位的过程中,节点需要周期性地向外广播一组具有固定特征的信息帧,用于测量信号强度,本文信息帧结构如图2所示。
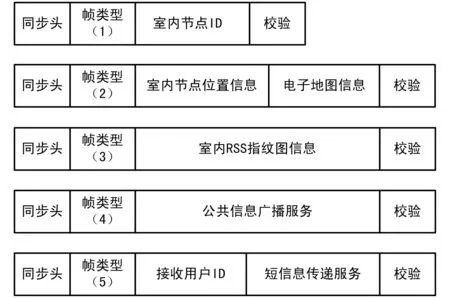
图2 室内节点信息帧结构
为分析室内节点信号与北斗卫星信号在兼容性上的问题, 2种信号在各种参数和性质上的对比如表1所示。
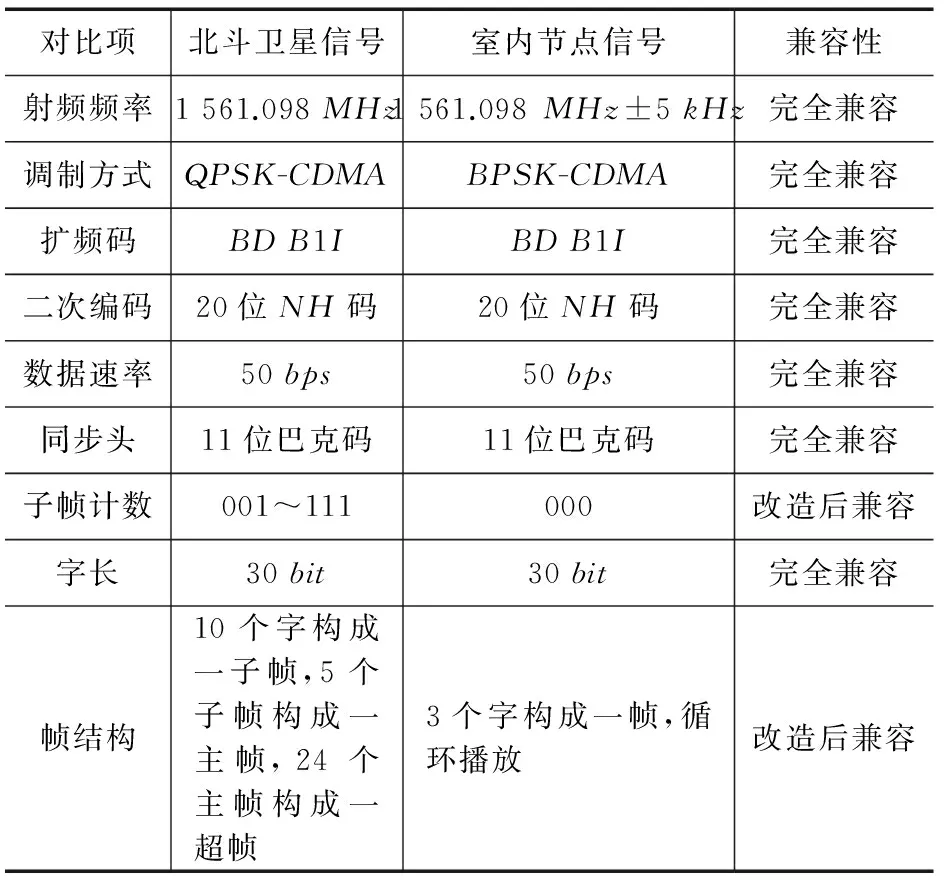
表1 信号兼容性分析
2.2室内环境模拟与指纹节点部署
信号强度在室内复杂环境下波动很大,主要的影响来自于阴影损耗,路径损耗的波动并不大,而多径的影响由可以通过多次测量取平均来消除。此外还有折射、吸收和噪声等,但这些因素对信号强度的影响较小,此处不予考虑。本文所确定的传播模型中包含3种主要的衰减:自由空间路径衰减、穿门和穿墙的衰减以及从均值为零的高斯分布的阴影衰减[9]。其中自由空间路径衰减比较稳定,而穿墙、穿门衰减和阴影衰落都服从统计特性,这就要求在测量指纹图时需要多次测量来消除随机误差。
室内空间相对狭小,结构相对复杂,障碍物密集以及很多实时变化的因素,极易造成室内传播信号的不确定性甚至中断。因此,对于较高定位精度的室内定位系统来说,本文采用一种基于信号欧氏距离的室内节点快速部署方案。
2.3北斗指纹节点的定位方法
2.3.1基于改进的Cell-ID的低精度定位模式
基于改进的Cell-ID的定位算法如图3所示,假设整个室内环境布置了K个指纹节点(TP1,TP2,……,TPK),北斗接收机接收到的RSS(ReceivedSignalStrength)向量为(RSS1,RSS2,…,RSSi,…,RSSK),其中RSSi为接收机接收到的第i个指纹节点的信号强度值。

图3 基于Cell-ID的低精度定位模式
2.3.2基于RadioMap的高精度定位模式
基于RadioMap的高精度定位模式如图4所示,主要分为离线阶段和在线阶段[10]。离线阶段的主要任务是在布置完指纹节点后,建立指纹节点信号强度的RadioMap。

图4 基于RadioMap的高精度定位模式
2.4北斗互相关干扰分析与抑制
对于基于北斗指纹节点的室内外无缝定位系统,由于北斗接收机接收到的室内布置的北斗指纹节点发射的信号功率一般比接收到的北斗卫星信号的功率大。所以当同时能观测到北斗指纹节点信号与北斗卫星信号时,较强的指纹节点信号会对接收机观测较弱的北斗卫星信号产生干扰,从而产生互相关干扰[11]。
本文采用子空间投影的思想对互相关干扰进行抑制。子空间投影的基本原理是利用强信号估计的参数构建强信号子空间,再得到其强信号子空间的正交空间,然后通过投影矩阵将接收信号在其正交空间上进行投影,利用强信号预期子空间的正交空间的正交性即可消除强信号[12],达到对互相关干扰进行抑制的目的。
北斗接收机中下变频得到的中频信号r如式(2)所示,由3部分组成:M个弱信号WAw、N个强信号SAs和热噪声n。
r=WAw+SAs+n。
(2)
式中,接收信号是一个向量的形式r=[r(1),r(2),…,r(K)]T,K为总的采用点数;而向量Aw=[aw1,aw2,…,awM]T,为弱信号的幅度矢量;W为一个K×M的矩阵,具体形式如式(3)所示[13]:
W=[W1,W2,…,WM],

(3)
式中,Di(t)为第i个弱信号的数据比特信息;Ci(t)为第i个弱信号的C/A码;而fi为其载波频率;θi为载波初始相位。同样对强信号而言,As=[as1,as2,…,asN]T为强信号幅度矢量;S为一个K×N的矩阵:
S=[S1,S2,…,SN],
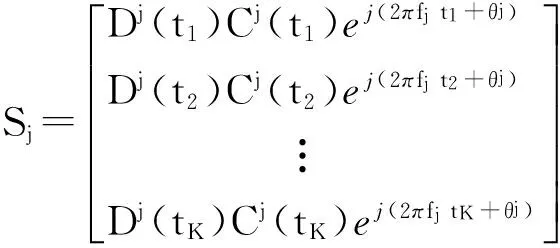
(4)
假设长度为K的接收信号内的强信号已完成捕获及跟踪,即已经估计出强信号的数据比特信息、码相位信息以及载波频率值以及初始相位值。根据估计的强信号信息就可重建矩阵S,然后通过如下变换就可求得投影矩阵H:
H=S(SHS)-1SH。
(5)
投影矩阵有个很好的性质就是HS=S,因此分别在式(2)的等式两边左乘矩阵H有:
Hr=HWAw+HSAs+Hn=HWAw+SAs+Hn。
(6)
再利用式(2)-式(6)有:
r-Hr=(I-H)WAw+(I-H)n。
(7)
由于C/A码近似正交且弱信号的强度远低于强信号与噪声,所以HWAw≈0,因此,
r-Hr≈WAw+(I-H)n。
(8)
式(8)即为经过子空间投影后对强信号进行抑制后得到的弱信号及噪声分量。
3 仿真结果分析
本仿真针对空旷室内环境和复杂室内环境进行了环境建模,并分别基于这2种环境进行了实验验证,以保证北斗无缝定位系统的定位能力。
为验证空旷室内环境下系统的定位能力,本文仿真生成了一个15m*15m的空旷房间环境,如图5所示。
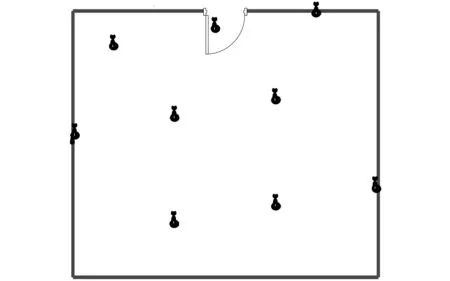
图5 空旷室内环境试验场景
图5中圆点表示AP,外框表示墙体。在其场景下进行了定位仿真实验,参考点间距1m,参考点采样次数100次。定位测试共进行了10 000次,每次随机产生真实位置,并将测量位置与之比较得到的定位精度情况如图6所示。从图6中可以看出,空旷环境下的定位精度可以达到1σ内1.16m。
在空旷室内环境下,本文进行了室内外环境切换试验,如图7所示。图中矩形方块为定位结果,而圆点代表用户的真实位置。当系统判决用户处于室外时,便不再提供指纹定位服务,转而进行室外卫星定位。
为验证系统在复杂室内环境下的工作情况,本文设置了一个2层结构的虚拟建筑物,2层楼的结构相同,AP布设位置相同,如图8所示。
每层建筑物面积12m*14m,包含左右各3个房间,以及中间的走廊。右下方的房间被设置为楼梯间,其中2个并列放置的AP中右侧的一个是处于2层楼之间的AP。

图6 空旷环境下定位误差的概率分布

图7 空旷室内环境下的室内外切换试验结果

图8 复杂室内环境试验场景
复杂环境下的定位仿真实验同样进行了10 000次,室内参考点间距1m,每个参考点采样次数为100次。复杂室内环境下定位误差的概率分布如图9所示,可以看出1σ定位误差在1m左右。

图9 复杂室内环境下定位误差的概率分布
为验证2层楼间的切换能力,实验中人为地产生了一段用户轨迹,从一楼走廊顶端进入,走进楼梯间并上楼,再在二楼沿走廊回到走廊顶端,如图10和图11所示。

图10 一楼轨迹

图11 二楼轨迹
图10和图11中,三角形表示用户在一层和二层的真实轨迹,而圆点则表示定位系统给出的定位结果。可以看到定位系统能够根据用户的位置变化而区分出用户所出的楼层并准确的进行定位。
4 结束语
本文结合了IMES系统中的指纹节点和WLAN室内定位中的RadioMap的思想,提出了一种基于北斗指纹节点的室内外无缝导航定位系统。该系统对北斗室内指纹节点的射频和帧格式进行了设计,同时该指纹节点系统集成了改进的Cell-ID的低精度定位模式和基于RadioMap的高精度定位模式,并提出了基于子空间投影的互相关干扰抑制算法。最终对空旷室内环境和复杂室内环境下的北斗无缝定位系统的定位能力进行了仿真分析,通过仿真结果可以看出,本系统达到了无缝定位的效果。
[1]倪霞,邹传云,周兴旺.UWB定位中的自适应时间延迟估计算法[J].无线电通信技术,2009,35(2):43-45,55.
[2]BAHLP,VENKATAN,PADMANABHANVN.Radar:AnIn-BuildingRF-BasedUserLocationandTrackingSystem[C]∥NineteenthAnnualJointConferenceoftheIEEEComputerandCommunicationsSocieties,2000:26-30.
[3]CASTROP,CHIUP,KREMENEKT.AProbabilisticRoomLocationServiceforWirelessNetworkedEnvironments[J].Ubicomp,2001,22(1):18-34.
[4]莫中秋,张泽星.GPS基准站布设中的卫星可见性分析方法[J].无线电工程,2013,43(8):36-39.
[5]YOUSSEFM,AGRAWALAA.HandlingSamplesCorrelationintheHorusSystem[C]∥Proc.IEEEInfoCom2003Conf.,2004:1 023-1 031.
[6]JOELB,CHRISR,JINLINGW,etal.HighPrecisionIndoorandOutdoorPositioningusingLocataNet[J].JournalofGlobalPositioningSystems,2003,2(2):73-82.
[7]MANANDHARD,OKANOK,ISHIIM,etal.DevelopmentofUltimateSeamlessPositioningSystemBasedonQZSSIMES[C]∥IONGNSS2008,Savannah,GA,2008:1 698-1 705.
[8]PARKINSONBW,SPILKERJJ,AXELRADP,etal.GlobalPositioningSystem:TheoryandApplication,Vol.I[M].AmericanInstituteofAeronauticsandAstronau-tics,1996.
[9]HALLENAD,HOLTZMANJ,ZVONARZ.MultiuserDetectionforCDMASystems[J].IEEEPersonalCommunications,1995(4):46-58.
[10]MOSHAVIS.Multi-userDetectionforDS-CDMACommunications[J].CommunicationsMagazine,IEEE,1996,34(10):124-136.
[11]VERDUS.MinimumProbabilityofErrorforAsynchronousGaussianMultiple-accessChannels[J].IEEETransactionsonInformationTheory,1986(32):85-96.
[12]VERDUS.OptimumMultiuserAsymptoticEfficiency[J].IEEETransactionsonCommunications,1986(34):890-897.
[13]VARANASIMK,AAZHANGB.MultistageDetectioninAsynchronousCode-DivisionMultiple-AccessCommunica-tions[J].IEEETransactionsonCommunications,1990,38(4):509-519.
江城男,(1982—),博士,工程师。主要研究方向:惯性导航与组合导航、卫星导航。
An Indoor and Outdoor Seamless Navigation and Positioning System Based on Beidou Terminal
JIANG Cheng
(TheAirForceEquipmentResearchInstitute,Beijing100094,China)
In view of the problem of indoor and outdoor seamless position,with the characteristics of Beidou navigation signal combined with the RadioMap ideas in the WLAN indoor position,the paper proposes an indoor and outdoor seamless navigation and position system based on Beidou terminal.The existing Beidou terminal can realize the function of indoor and outdoor seamless position just through soft-upgrade.Simulation results show that the position accuracy of this system reaches 2 meters both in the outdoor open environment and indoor complex environment.Moreover,the continuity of indoor and outdoor position is guaranteed.The system provides a technical way to solve the problem for global coverage of Beidou navigation system.
Beidou satellite navigation system;indoor and outdoor seamless positioning;fingerprint minutia;cross-correlation interference
10.3969/j.issn.1003-3106.2016.08.10
2016-05-09
国家高技术研究发展计划(“863”计划)基金资助项目(2015AA124001);国家国际科技合作专项基金资助项目(2013DFA10540)。
TN391.4
A
1003-3106(2016)08-0038-05
引用格式:江城.基于北斗终端的室内外无缝定位系统设计[J].无线电工程,2016,46(8):38-42.
