基于地磁信号的车辆检测系统设计
2016-08-17陈虹安刘智勇阮太元五邑大学信息工程学院广东江门5900江门职业技术学院广东江门59000
陈虹安,刘智勇,阮太元(1.五邑大学 信息工程学院,广东 江门 5900;.江门职业技术学院,广东 江门 59000)
基于地磁信号的车辆检测系统设计
陈虹安1,2,刘智勇1,2,阮太元2
(1.五邑大学 信息工程学院,广东 江门 529020;2.江门职业技术学院,广东 江门 529000)
地磁检测是一种新型的车辆检测技术,但是目前市面上的地磁检测设备受到采样速率和精度的限制,其准确度仍不能满足实际需要.本文研发了一款基于HMC5983集成模块的地磁检测设备,它由地磁传感器、无线传输网络、上位机及其配套软件构成,能把车辆引起的地磁扰动转化为变化的电压信号,通过对电压信号的监测最终实现车辆的实时检测.实际道路验证表明,本系统的采样 速 率 220 Hz、准确率 9 8.7%.
地磁检测;车流量检测;防脉冲干扰平均滤波算法;状态机检测算法
车辆检测是构建交通信号控制系统和交通信息系统的基础,现在使用较为广泛的车辆检测技术主要包括感应线圈、视频和波频等[1-2].作为一种新兴的检测技术,地磁车辆检测以独特的优势引起了较多的关注.相对于其他技术而言,它具有占用空间更小、安装更加方便、受环境限制小及可靠性强等优点.因此,具有巨大的研究价值与发展潜力.地磁检测的原理是将车辆经过时引起的地磁扰动转化为变化的电压信号.目前,市面上已有不少基于地磁检测的车流量检测设备[3-4],但是受到采样速率和精度的限制,其准确度仍不能满足实际需要.基于此,本文研发了一款基于地磁感应的车辆检测系统并用于实践,以期可以满足交通信号控制系统或交通信息系统采集数据的需求.
1 地磁车辆检测系统的检测原理与系统设计
地球本身是一个弱磁体,其磁场强度大小在一定范围内可认为是均匀分布的.但当大型金属物体如汽车经过时,会引起地球磁场的扰动;当地球磁场发生变化时,某些特殊材料的电阻值会随之而变化[5].磁阻传感器的基础部分是惠斯通电桥,其4个桥臂电阻就是由这些特殊材料制成的,当地球磁场发生变化,输出电压会随着桥臂阻值的变化而变化,以此实现从磁场变化到差分电压变化的转换.
本文设计的地磁检测系统如图1所示,主要包括基于磁阻效应的地磁传感器、无线传输网络、上位机及其配套软件等.其中,地磁传感器主要负责数据的采集、处理和无线发送;协调器负责接收传感器节点发送过来的无线数据;上位机(即PC机)负责记录结果.

图1 地磁车辆检测系统的设计
2 传感器节点的设计
2.1 传感器节点的构成及电路设计
地磁系统传感器节点主要采用HMC5983芯片、CC2530芯片、无线AF通讯电路、电源及相关电路设计而成,其构成及裸板如图2、图3所示.其中HMC5983主要负责实时采集地磁变化信号,CC2530负责读取采集到的信号并进行判断和结果发送,二者之间采用 I2C通讯方式进行数据传输.
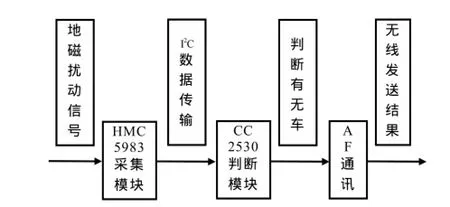
图2 地磁传感器节点的组成

图3 地磁传感器节点裸板
HMC5983芯片是利用各向异性磁阻技术(即AMR技术)建立起来的一种三轴的磁阻传感器,能较为准确地采集到地球磁场的微小变化.其内置放大器、模数转换器、复位电路及自动补偿电路等,可直接输出数字信号.最为重要的是,该芯片最高可以达到2 mG的解析度和220 Hz的输出速率,是Honeywell公司目前所有的低磁传感器中灵敏度和可靠性最高的传感器芯片.
CC2530芯片是TI公司研发的一款可用于建立Zigbee网络的片上系统(SOC)芯片.该芯片内含增强型的8051CPU,具有128 kb的系统内可编程闪存和8 kb的RAM(可用于数据保存),其最高传输速率可达250 kb/s.最重要的是,该芯片适用于2.4 GHz IEEE 802.15.4的RF收发器,可用于建立无线传感网络.
HMC5983与CC2530之间的连接以及AF通讯电路的设计如图4所示.
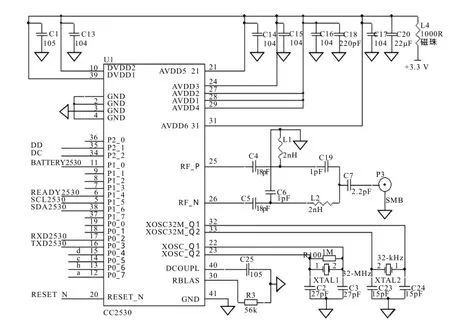
图4 传感器节点电路设计图
2.2 电源系统的设计
在本系统中,HMC5983要求的供电范围是2.16~3.6 V,CC2530要求的供电范围是2.6~3.6 V.因此,系统用两节电压为3.7 V的锂电池作为电源,再使用RT8008芯片进行电压转换使得芯片的输出电压为3.3 V.电源系统的电路设计如图5所示.

图5 电源系统电路设计
2.3 协调器与上位机
协调器是Zigbee网络组织中的管理者,在网络中主要起到管理和信息中转的作用.在本系统中协调器主要负责接收传感器节点发送过来的无线数据,并且以串口的方式发送至上位机.
上位机在实验时可采用PC机,而在实际应用中可采用工控机.上位机主要负责接收协调器发送过来的数据,并把数据通过互联网传送至交通控制中心.
3 地磁系统在车流量检测中的应用研究
3.1 地磁数据的采集
地磁车辆检测系统首先要实现的功能是通过传感器节点采集到实时的地磁数据,图6为实际测试中采集到的连续33 s内从检测器上方和旁边车道经过的车辆引起的地磁扰动波形.
由图6可以看出:1)当车辆从传感器上方经过时,X、Y和Z三个方向上的地磁强度均会发生变化;2)有的车辆引起的波动幅度较高且持续时间长,而有的车辆引起的波动幅度相对小且持续时间短(这是由于车辆的长度、体积以及含有的铁性物质不同所造成的.虽然它们的波形不一,但其波动的时间长度及幅度足够我们进行有无车辆的判断);3)在26.1~27.0 s,X、Y、Z三个方向上均有较为微小的波动,这是一辆小汽车从旁边车道经过时引起的扰动(该扰动波形幅度小且时间短,只要算法设置恰当,可以避免).

图6 地磁车辆检测系统采集的实际波形图
总而言之,当汽车经过传感器上方时,地磁信号急剧变化,这可作为车辆到来的判断依据.但是检测到的信号中包括了背景磁场信号和旁边车道引起的干扰等信号,为了更加准确地进行车辆存在性的判断,需要对信号进行预处理.
3.2 地磁信号预处理
防脉冲干扰平均滤波算法不仅能很好地滤除随机干扰的影响,还可以对数据进行滑动平均处理,所以其在数字滤波中使用广泛.其工作原理是先用中位值滤波算法滤除信号中的随机干扰,再将余下的采样值进行滑动平均滤波.具体算法如下:将N个连续采样值按大小排列,然后把采样值中的最大值和最小值去掉,最后计算余下的 2N- 个采样值的平均值作为当前采样值.公式如下:

图7-a是一辆小汽车以30 km/h的速度行驶时采集到的未经滤波处理的地磁信号:原始信号中存在一些毛刺;而当车辆到来时,波形迅速变化,又存在着随机干扰.在进行信号处理时,防脉冲干扰平均滤波算法不仅能较好地滤除毛刺和随机干扰使信号波形更加平滑,而且能很好地保留波形的变化.滤波后的地磁信号波形如图7-b所示.

图7 地磁扰动数据滤波处理前后
3.3 状态机检测算法
本系统中,传感器节点需要完成数据的采集与实时判断,故要求单片机能快速地完成车辆检测.这也就要求车辆检测算法必须简单、精确度高、实时性能好、占用内存小,且能避免车辆从旁边车道经过时引起的误判.图8为三辆汽车先后从旁边车道经过时引起的扰动波形.
本文设计的状态机检测算法将车辆检测过程分为3个状态:没车、有车、车辆离开.这三种状态的转换关系如图9所示,其中,α( k )表示第k次测得的数据;g( I)表示第I次更新的背景磁场;ρ表示阈值的取值范围;x表示连续超出阈值范围的次数;y表示连续进入阈值范围的次数;M和K分别表示连续M次和K次超出阈值范围且K<M ;N和H表示连续N次和H次进入阈值范围且H > N .
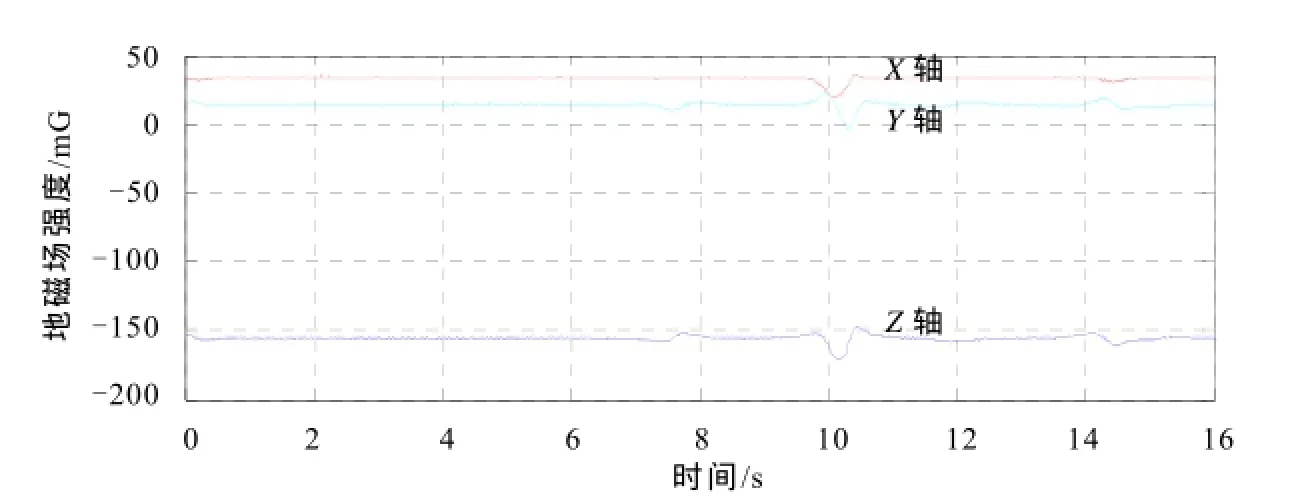
图8 旁边车道车辆引起的扰动波形
在无车的状态下,采集到的地磁场强度一般会在阈值范围内有微小的波动.若在连续H次采样中,磁场强度均没超出阈值范围,则取H次采样数据的平均值作为新的背景磁场强度 g ( I).而在算法中,阈值的取值为g( I )- ρ * g( I),这样就达到了自动更新阈值的效果.实验表明,ρ的取值为 ± 5 %时,能够较好地把背景磁场的波动囊括进去.

图9 车辆检测过程状态转换图
当车辆到来时,会引起地磁场的剧烈变化,其强度会迅速超出阈值范围.当地磁场强度连续M次超出阈值范围时,则确认车辆已经到来.
当磁场强度重新进入阈值范围时,并不能就此认定车辆已经离开,必须是连续N次进入阈值内,才可以确认车辆离开.只要N设置合理,就能准确地分辨出车辆是否离开,而且不影响对后续到来车辆的判断.
图9的具体转换如下:
1)当 α (k )- g ( I) < ρ * g( I )时,自动实现x置0和y自动加1,y记录着连续进入阈值范围的次数,作为判断车辆是否离开的依据;
2)当 α (k )- g ( I) > ρ * g( I)时,自动实现y置0和x自动加1,x记录着连续超出阈值范围的次数,作为判断是否有车辆到来的依据;
3)当α(k )- g ( I) < ρ * g( I) &&y > H 时,即连续H次进入阈值内,则通过更新背景磁场来间接更新阈值;
4)当(α(k )- g ( I) < ρ *g( I) && y > N ) ||(α(k )- g ( I) > ρ *g( I) && x <K)时,即当连续N次进入阈值内或连续超出阈值范围少于K次,则认为无车;
5)当α(k )- g ( I) > ρ * g( I) &&x > M 时,即连续M次超出阈值,则确认有车辆经过;
6)当α(k )- g ( I) < ρ * g( I) &&y > N 时,即连续N次进入阈值内,则认为车辆离开.
从图8可以看出,当旁边车道车辆引起的扰动持续时间不长且幅值较小时,只要M值和阈值范围取值恰当,就可以很好地避免干扰.
3.4 算法验证
选择市区潮连大道某一路段进行测试.由于经过此路段的车辆速度不一且车型丰富,所以该测试能反映实际交通状况并能获得不同车辆在不同速度下的地磁扰动波形.为了防止雨水损坏传感器,使用防水塑料盒将其装好置于车道中心;用雪糕桶把此路段的车道分隔开,防止车辆变道压坏传感器.测试时间为2015年5月18日,天气晴朗,气温25 C°,传感器的采样频率设为220 Hz.
本系统对300辆不同的车进行了检测,其中135辆小汽车、71辆中型汽车、56辆公交车和38辆大货车,系统检测出133辆小汽车、70辆中型汽车、56辆公交车和39辆大货车.剔除漏检的2辆小汽车和1辆中型汽车以及1辆误检的大货车,系统准确检测到了296辆车,准确率为98.7%.具体数据如表1所示.
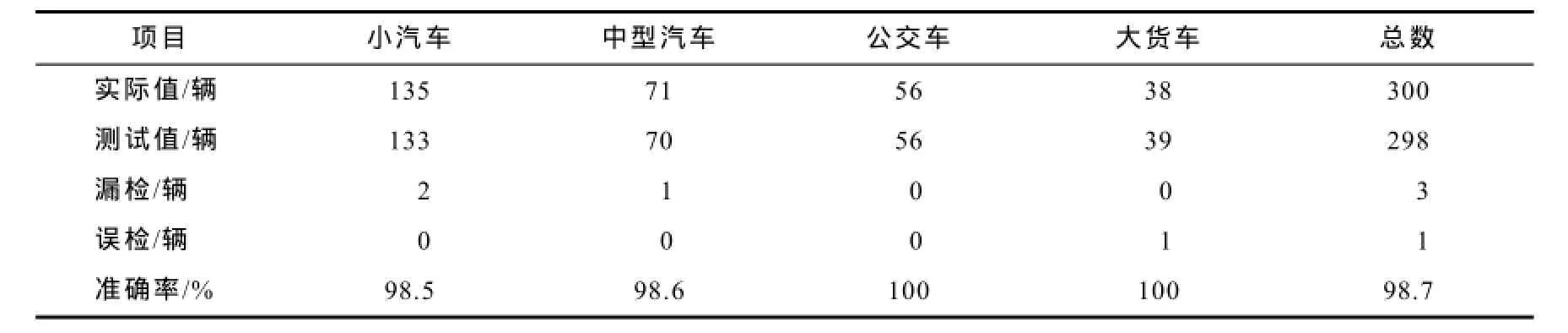
表1 车辆检测结果
4 结论
本文设计的车辆检测系统在车流量检测方面取得了一定的进展,可用于实时车流量的无线检测.通过实验验证了该系统的检测效果,其准确率可达98.7%,说明本文研发的系统是可行的.这为交通信号控制系统和交通信息系统的车流量检测提供了一种新颖且高效的方法.下一阶段将研究如何利用检测到的地磁数据进行车型分类.
[1]杜宏川.我国智能交通系统发展现状分析与对策分析[J].吉林交通科技,2009(1):60-63.
[2]李秀平,刘智勇,尹征琦.多传感器信息融合的智能交通控制系统研究[J].信息与控制,2001,30(5):460-464.
[3]潘霓,骆乐,闻育.基于磁阻传感器的车辆检测算法综述[J].计算机工程及应用,2007,43(10):210-213.
[4]任保利.地磁车辆检测与车型分类算法研究[D].广州:华南理工大学,2012.
[5]周丰,王明哲,倪枫.基于AMR传感器的行驶车辆检测分类算法[J].计算机应用研究,2010,27(7):2533-2535.
[6]姜胜山.基于WSNs的车辆检测系统的研究与设计[D].长沙:国防科学技术大学,2009.
[7]CHEUNG S,VARAIYA P.Traffic surveillance by wireless sensor networks[R].U C Berkeley:Transport Department,2007.
[8]郭鹏.应用于交通参数检测的无线传感器网络研究[D].北京:中国科学研究院,2007.
[责任编辑:熊玉涛]
Design of a Vehicle Detection System Based on Geomagnetic Signals
CHEN Hong-an,LIU Zhi-yong,RUAN Tai-yuan
(1.School of Information Engineering,Wuyi University,Jiangmen 529020,China; 2.Jiangmen Polytechnic,Jiangmen 529000,China)
Geomagnetic detecting is a new type of vehicle detecting technology.But the geomagnetic detection equipment available on the market is limited by the sampling rate and accuracy which cannot meet the actual needs.This paper develops a geomagnetic detection system based on the HMC5983 integrated module,which consists of a magnetic sensor,a wireless transmission network,a principal computer and the supporting software.It can change the geomagnetic disturbance caused by passing cars into dynamic voltage signals and can realize real time monitoring of vehicles by monitoring of the voltage signals.Actual road tests show that the sampling rate of the system is 220 Hzand the accuracy rate is 98.7%.
geomagnetic detecting;traffic flow detection;anti-pulse interference averaging filtering algorithm;state machine detection algorithm
TP212
A
1006-7302(2016)03-0055-06
2016-03-29
陈虹安(1989—),男,广东茂名人,在读硕士生,主要从事工程测试、信号处理及交通控制方面的研究;刘智勇,教授,博士,硕士生导师,通信作者,主要从事智能交通控制方面的研究.
