遥控武器站交流位置伺服系统控制及联合仿真
2016-08-12郭华新曹雏清周克栋
郭华新,赫 雷,曹雏清,周克栋
(南京理工大学 机械工程学院,南京 210094)
遥控武器站交流位置伺服系统控制及联合仿真
郭华新,赫雷,曹雏清,周克栋
(南京理工大学 机械工程学院,南京210094)
摘要:本文设计了一种新型车载遥控武器站,将复合前馈控制与模糊PI控制策略分别应用到遥控武器站位置伺服系统的位置环和速度环控制器,组成永磁同步电动机位置伺服系统串级复合控制器,解决了PID控制位置和速度变量带来的系统干扰问题,提高了其动态跟踪精度。基于ADAMS和Matlab/Simulink平台,建立了遥控武器站的机械动力学模型和联合仿真模型,经过仿真计算,验证了机电系统的可行性,为遥控武器站的应用实践和进一步深入研究打下了一定的基础。
关键词:遥控武器站;位置伺服系统;串级复合控制;联合仿真
本文引用格式:郭华新,赫雷,曹雏清,等.遥控武器站交流位置伺服系统控制及联合仿真[J].兵器装备工程学报,2016(6):10-15.
Citationformat:GUOHua-xin,HELei,CAOChu-qing,etal.CascadeCompoundControlandItsCo-SimulationofACPositionServoSystemofRemoteControlledWeaponStation[J].JournalofOrdnanceEquipmentEngineering,2016(6):10-15.
遥控武器站位置伺服系统包括方位位置伺服系统和高低位置伺服系统,遥控武器站总体结构见图1。位置伺服系统最核心的驱动部件是方位电机和高低电机[1]。
将永磁同步电动机位置伺服系统采用电流控制、速度控制和位置控制分开进行,实现三环串级控制可以获得可靠的调整性能和动态跟踪性能,其传统串级PID控制策略是电流环采用PI控制规律,确保电流环的快速响应,速度环采用PI控制规律,保证进行稳定的速度控制,使其定位时不产生振荡,位置环通常采用比例控制,具有高精度和良好的跟踪性能,由这种经典PID控制组成的串级控制结构虽然具有结构简单、稳态精度高、可靠性强、实现容易等优点[2],但系统在快速性、动态跟踪精度、抗干扰能力方面无法满足遥控武器站对位置控制及射击精度要求。
本文研究了将复合前馈控制与模糊PI控制策略分别应用到遥控武器站位置伺服系统的位置环和速度环控制器,从而组成永磁同步电动机位置伺服系统串级复合控制器,并应用ADAMS和控制仿真软件Matlab/Simulink建立遥控武器站的机械动力学模型和联合仿真模型。
1.激光测距机;2.CCD摄像机;3.热像仪;4.模块化通用武器架;5.高低机蜗轮蜗杆;6.方向机电机;7.方向机减速器;8.方向减速机输出端与传动装置联轴器;9.弹药箱;10.回转机构
图1遥控武器站总体结构
1 交流位置伺服系统串级复合控制
本文永磁同步电机(PMSM)位置伺服系统基于矢量控制,由电流环、速度环和位置环构成三闭环的调节系统,根据id=0矢量控制方式,给出在此控制方式下PMSM矢量控制系统原理图[3],如图2。
采用id=0的矢量控制,PMSM解耦状态方程为
(1)
式中iq为q轴电流,ωr为转子角速度,R为绕组等效电阻;L为等效电感;Tl为负载转矩;J为折算到电机轴上总的转动惯量,ψf为永磁体在定子上所产生的耦合磁链,pn为极对数。在零初始条件下,对PMSM解耦状态方程求拉普拉斯变换,以电压uq为输入,转子速度为输出的PMSM控制系统方框图如图3[4]。

图3 PMSM控制系统框图
在图3中加入位置环控制器、速度环控制器及其前向滤波器、反馈滤波器和电流环控制器及其前向滤波器、反馈滤波器后,速度积分单元和光电编码器检测放大系数α可得到伺服系统三闭环控制图[5],如图4。
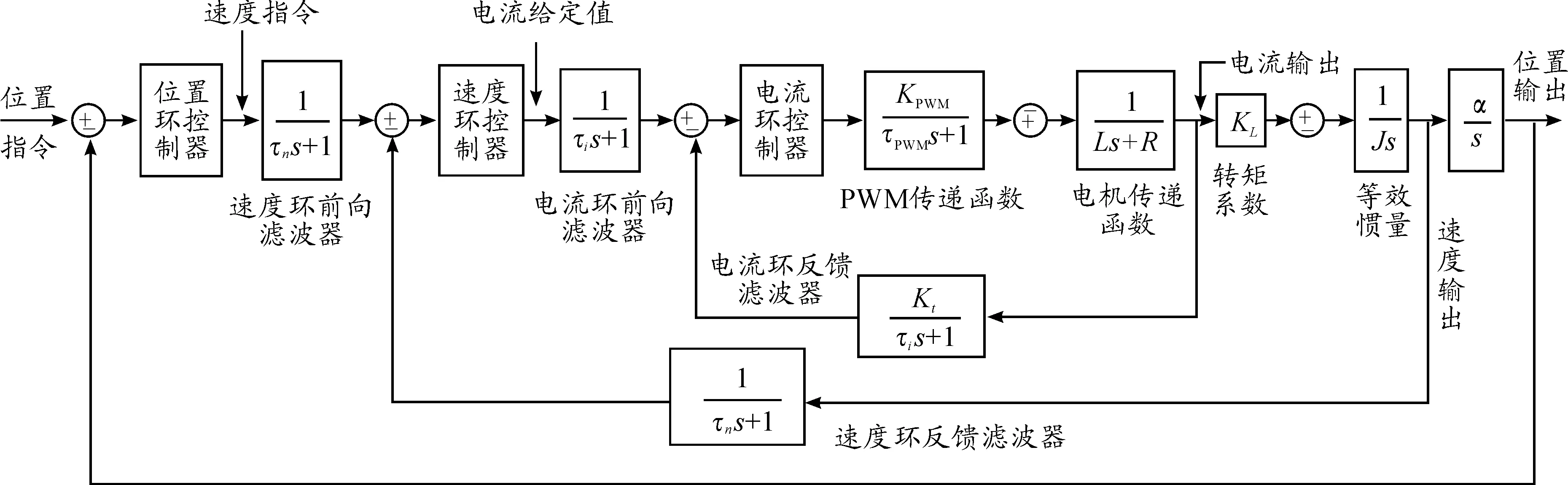
图4 位置伺服系统控制框图
1.1电流环PI控制器设计
电流环的关键部分包括电流环控制器、PWM逆变器及电机电枢回路。
电流环是速度调节环节中的一个环节,由于速度调节环的截止频率较低,且Ti<<τi,故电流环可降阶为一个惯性环节,由此可实现速度调节环速度调节器的设计。降阶后的电流环传递函数为
(2)
式中,K′=KKiKp。其中,K=1/R,Kp为电流调节器的比例放大倍数,Ki为小惯性环节控制增益。
1.2速度环控制器设计
在PMSM位置伺服系统中电流环节可以等效成为一阶惯性环节如式(2)所示,选择速度调节环速度调节器为PI调节器时,其传递函数为
(3)
Ks、Ts分别为速度调节环速度调节器的放大倍数和积分时间常数。
采用速度环PI控制,其优点在于控制方法简单,对于在速度响应、跟随、抗干扰方面控制精度要求不高的系统是比较好的控制方法。但PI控制存在超调现象,特别是在高速度响应时。由于超调的不确定性,很容易导致电机角速度超过其所允许的最大角速度,加剧电机的损耗,同时速度超调过程到恢复稳定过程中,系统加速度的变化更加干扰跟踪的准确性。为了提高位置伺服系统的鲁棒性,需要对速度环控制策略进行优化,本文对速度环调节器采用的优化策略是模糊PI控制策略,充分结合模糊控制和PID直接的优点,既体现PID控制精度相对高,又发挥模糊控制适应性强的优点[6-9]。
1.3位置环控制器设计
经典的位置环采用比例控制,主要从超调和振荡两方面考虑,在保证位置跟随性能稳定的前提下,控制器越简单越好。在位置伺服系统中的比例增益需要不断调试,小的位置比例增益虽然能够保证系统的稳定性,但控制系统频带较窄;大的位置比例增益可提高位置响应,但抗干扰性差。
对于遥控武器站,特别是在其执行目标检测、识别、跟踪工作状态,位置环若单纯使用比例控制器,其位置跟踪误差往往较大,并且若希望位置无超调,也必须以放弃快速响应为代价。为了达到位置伺服系统的无超调与快速响应,仅仅依靠改变位置环比例控制器的比例增益是无法完成的。
为克服系统静态精度与动态品质之间的矛盾,可以采用复合控制方法对误差进行补偿。复合控制是在误差控制的闭环系统基础上并联一补偿器,即系统的执行机构受系统误差信号和输入信号的高阶微分信号综合控制。遥控武器站交流位置伺服系统位置环复合前馈控制等效结构图如图5[10]。
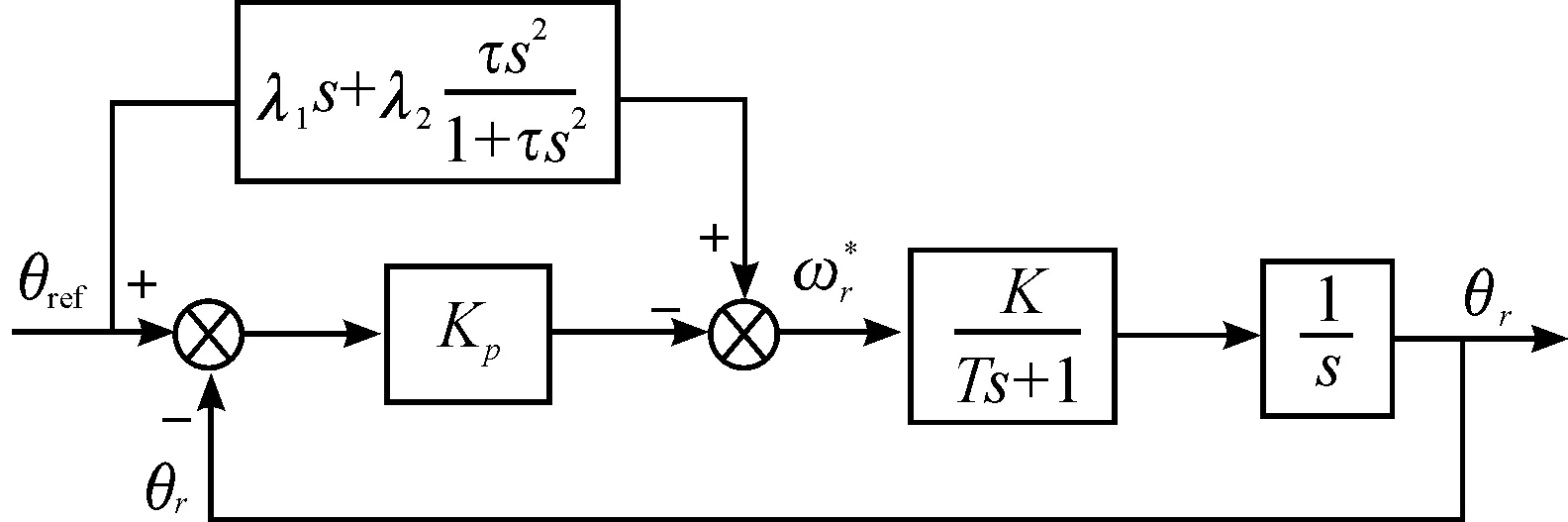
图5 位置环复合前馈控制等效结构
遥控武器站交流位置伺服系统各环节传递函数为
(4)
考虑对遥控武器站交流位置伺服系统速度跟踪信号和正弦跟踪进行前馈补偿,前馈补偿传递函数参数设计为:
(5)
2 遥控武器站位置伺服系统串级复合控制策略及仿真
根据交流伺服电机及其他结构参数分别设计位置环比例控制器、位置环前馈控制器并结合速度环PI控制器与速度环模糊PI控制器组成遥控武器站位置伺服系统串级复合控制器并进行计算机仿真。图6~图8分别为高低系统单位阶跃跟踪曲线比较图、正弦跟踪比较图、输入单位阶跃信号在0.5 s时加入扰动力矩为1.21 N·m时的扰动曲线比较图。
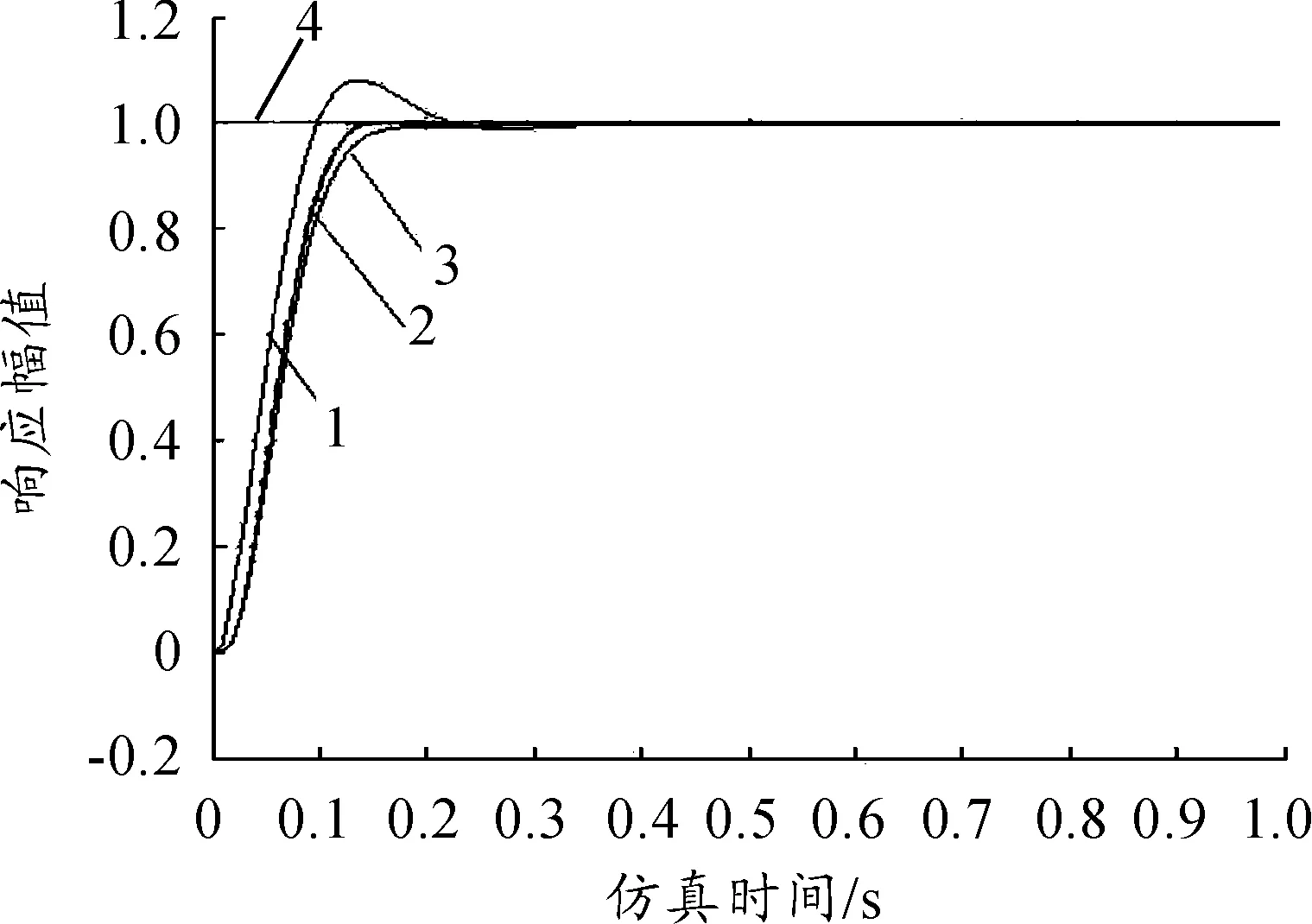
1.经典PID串级控制曲线;2.位置环复合前馈控制、速度环模糊PI控制曲线;3.位置环比例、速度环模糊PI控制曲线;4.输入曲线
图6高低系统单位阶跃跟踪曲线比较

1.经典PID串级控制曲线;2.位置环复合前馈控制、速度环模糊PI控制曲线;3.位置环比例、速度环模糊PI控制曲线;4.输入曲线;5.基于PI速度控制的位置环复合前馈控制曲线
图7高低系统正弦跟踪曲线比较

1.经典PID串级控制曲线;2.位置环复合前馈控制、速度环模糊PI控制曲线;3.位置环比例、速度环模糊PI控制曲线;4.输入曲线;5.基于PI速度控制的位置环复合前馈控制曲线
图8高低系统受干扰曲线比较
当输入信号为位置阶跃信号时,因为位置指令是定常数,基于PI速度环控制的位置环复合前馈控制在理论上就是PID控制,即位置环比例控制、速度环PI控制,因此图6中未加入基于PI速度环控制的位置环复合前馈控制曲线。比较结果表明:位置环复合前馈、速度环模糊PI控制在单位阶跃过程中不存在超调,并且稳定时间较短,在输入信号为正弦信号时,其跟踪性能较强,对干扰不敏感,恢复时无超调。相比于其他3种串级复合控制策略,位置环复合前馈、速度环模糊PI控制的鲁棒性能更好。
3 遥控武器站位置伺服系统联合仿真
3.1联合仿真模型
遥控武器站的武器系统、观瞄设备和目标的空间三维简图如图9。
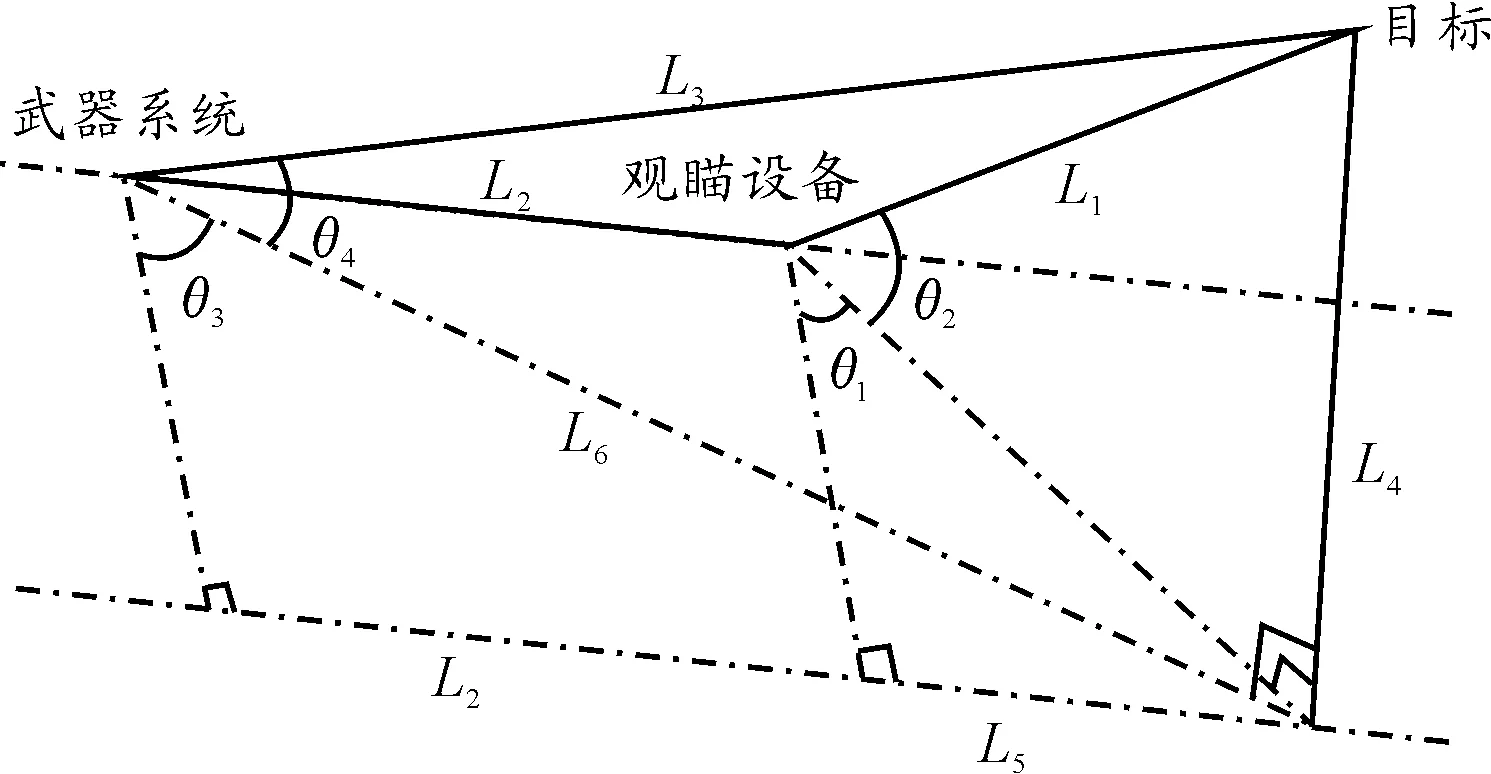
图9 武器系统、观瞄设备和目标的空间三维简图

以静止目标为远距离时,即目标到武器系统和观瞄设备的空间距离L1(L1>15 m)观瞄设备到武器系统的水平距离L2(L2=0.25 m)时,可近似得到:θ3≈θ1、θ2≈θ4,取:
(6)
其中θ1为水平视场角,θ2、θ3为垂直视场角。本设计中选取观瞄设备的垂直视场角为-20°~20°,水平视场角为-50°~50°。
假设目标出现在观瞄设备的搜索区域内,并给武器系统下达位置转动命令:方向位置转动0.87 rad,高低位置转动0.35 rad。
联合仿真过程中设置[6]:方向位置转动0.87 rad,高低位置转动0.35 rad。折算到方向电机输入轴的转动角度为137.6 rad,方向电机输入轴的转动角度为56 rad。方位系统的最大角速度为1.3 rad/s,高低系统的最大角速度为1.0 rad/s,折算到方向电机轴的最大角速度应为208 rad/s,高低电机轴的角速度应为160 rad/s。仿真时间为2.5 s。遥控武器站机电系统联合仿真模型原理图如图10。
3.2仿真结果分析
通过建立测量可得到高低机和方向机的转角曲线,本节以方向系统为例,仿真结果如图11~图12所示。
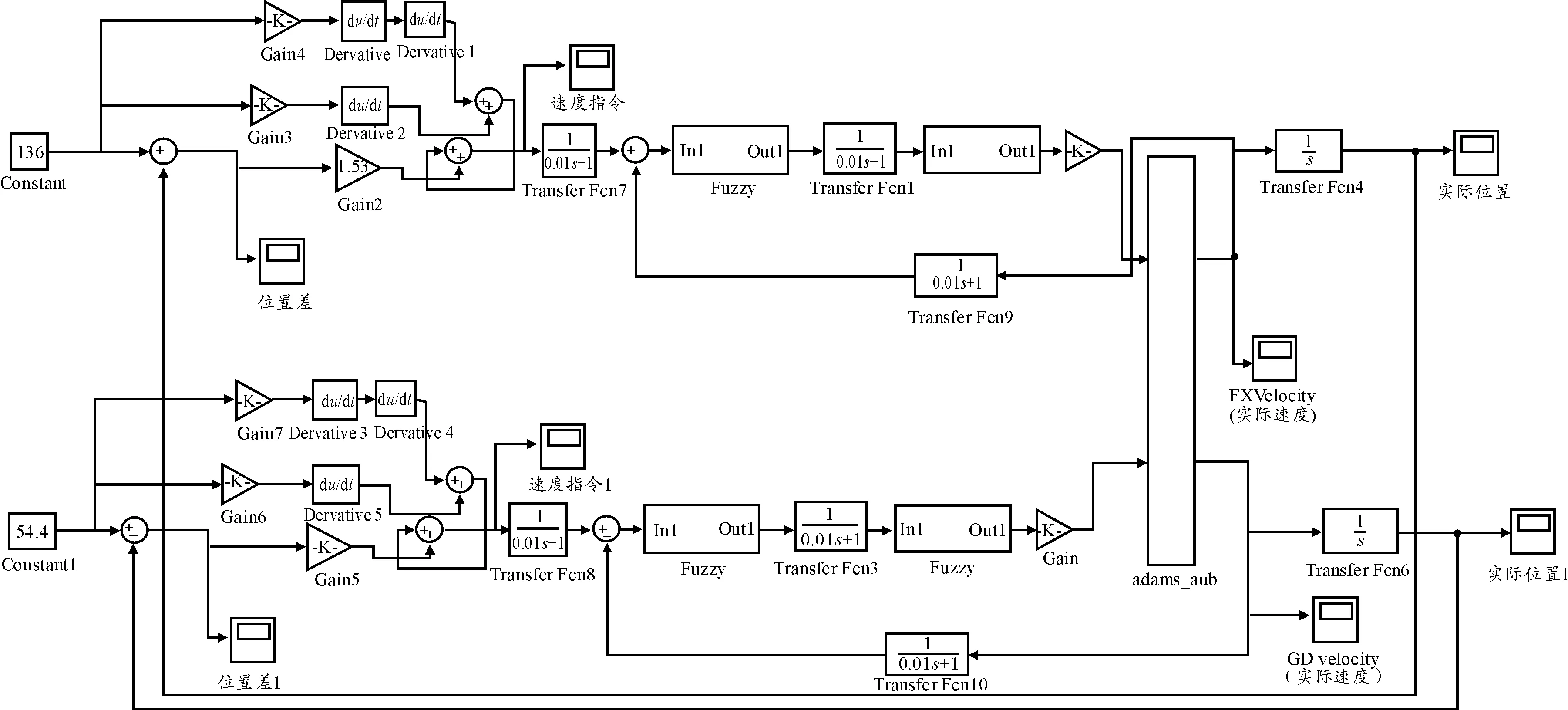
图10 遥控武器站机电系统联合仿真模型原理图
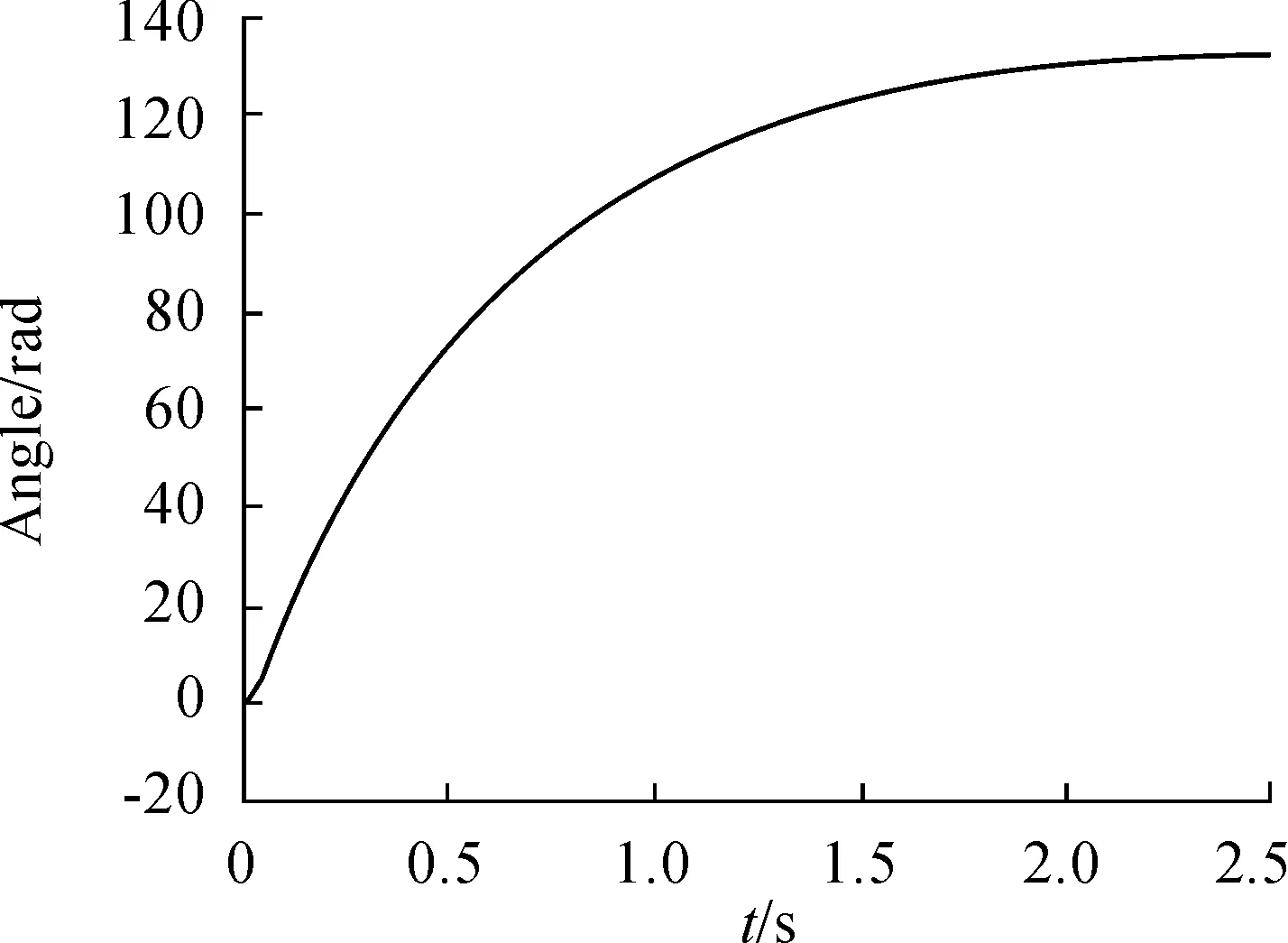
图11 方向电机转角曲线
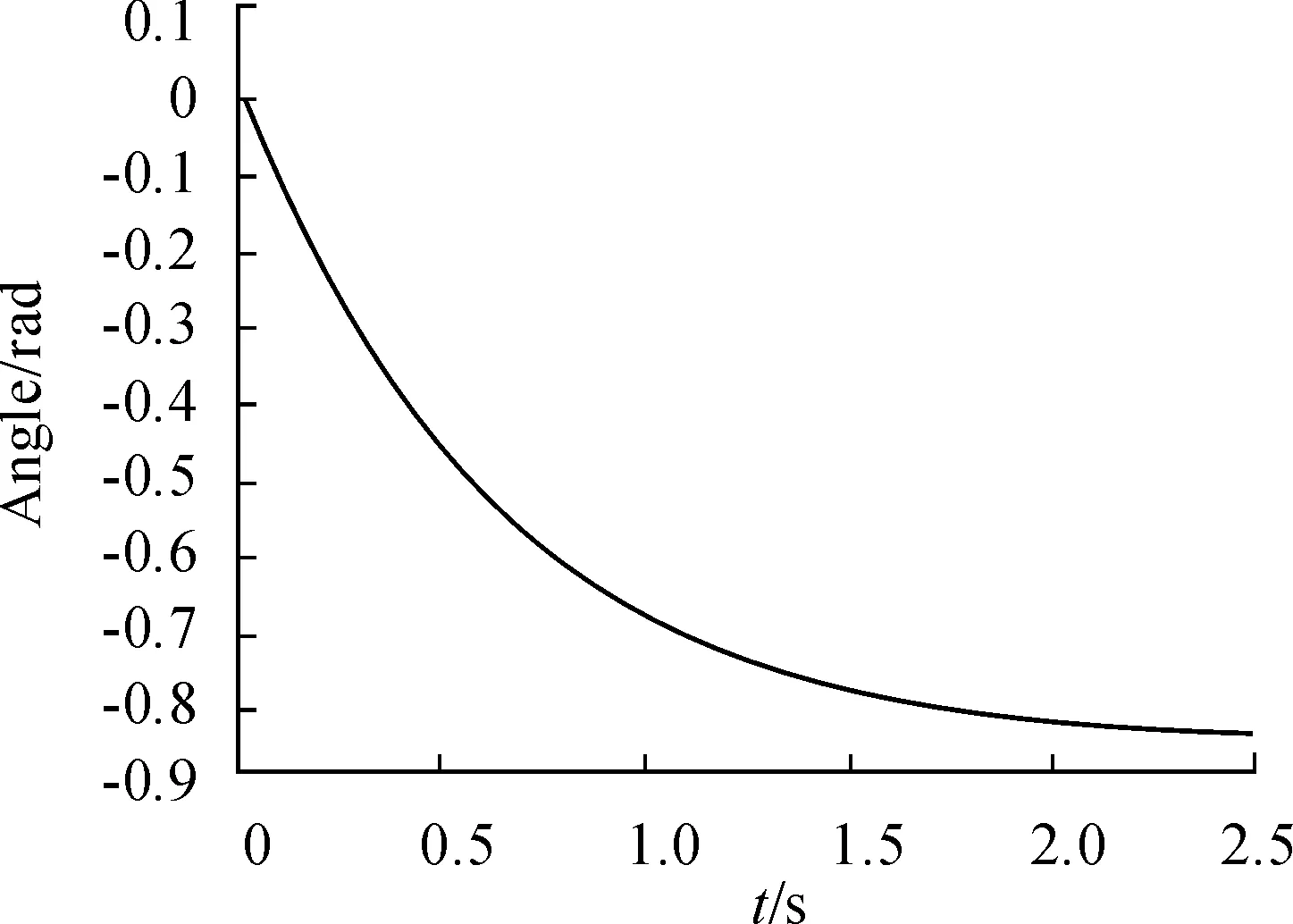
图12 武器系统方向位置转角曲线
从图11、图12可知方向电机在2.5 s时到达指定目标位置137.6 rad,同样是在开始调速时,加速度较大,之后位置的移动量减缓。
方向电机指令转速、实际转速及其武器系统转速、加速度如图13~图16所示。
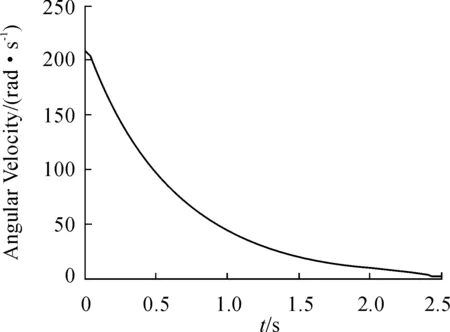
图13 方向电机指令转速曲线
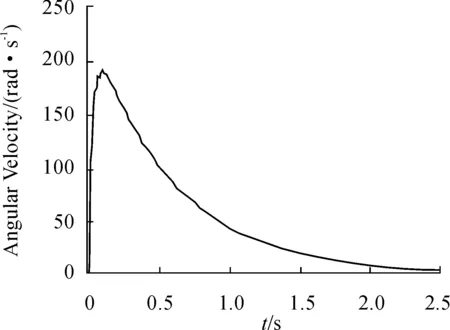
图14 方向电机实际转速曲线
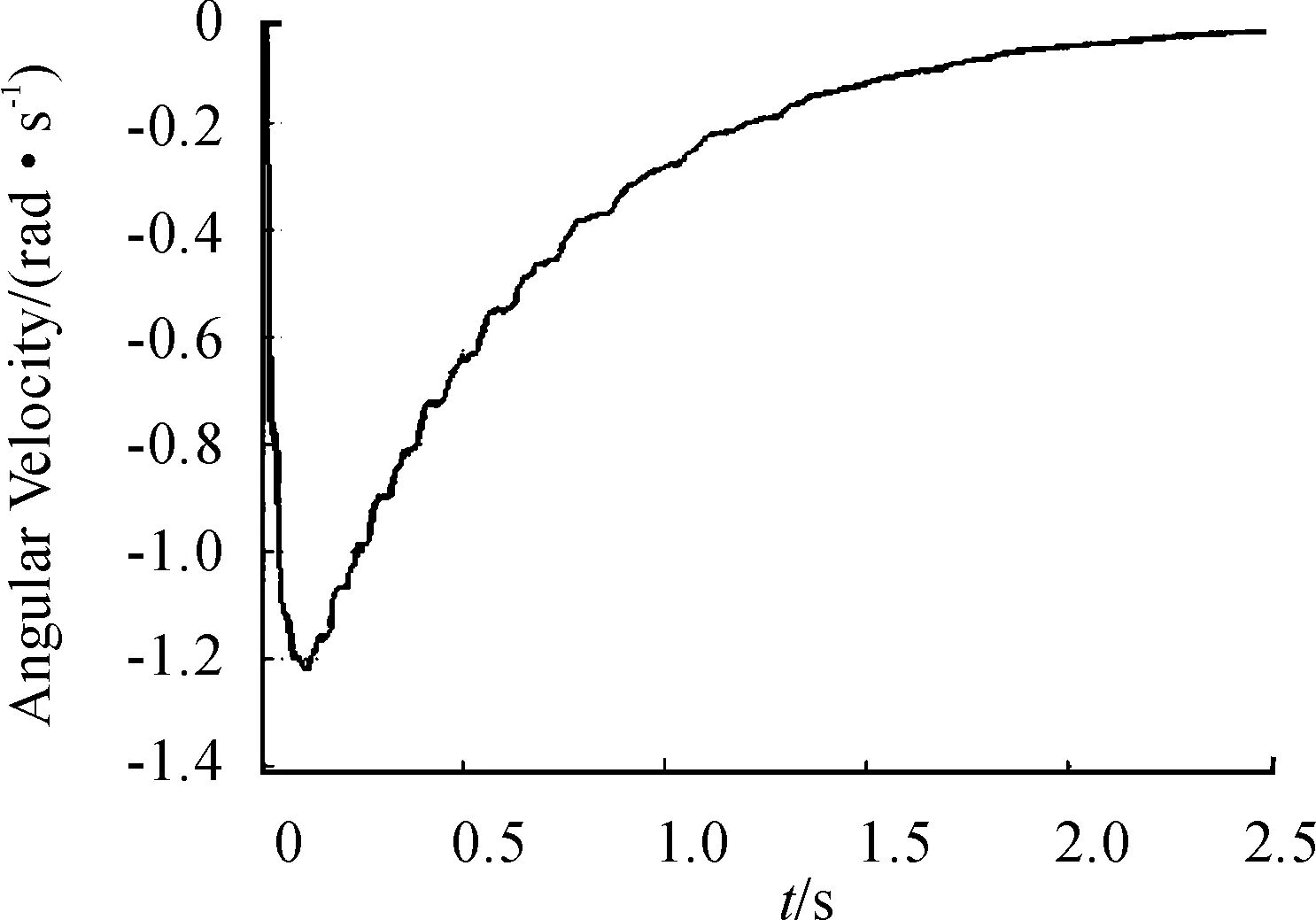
图15 武器系统方向位置转速曲线
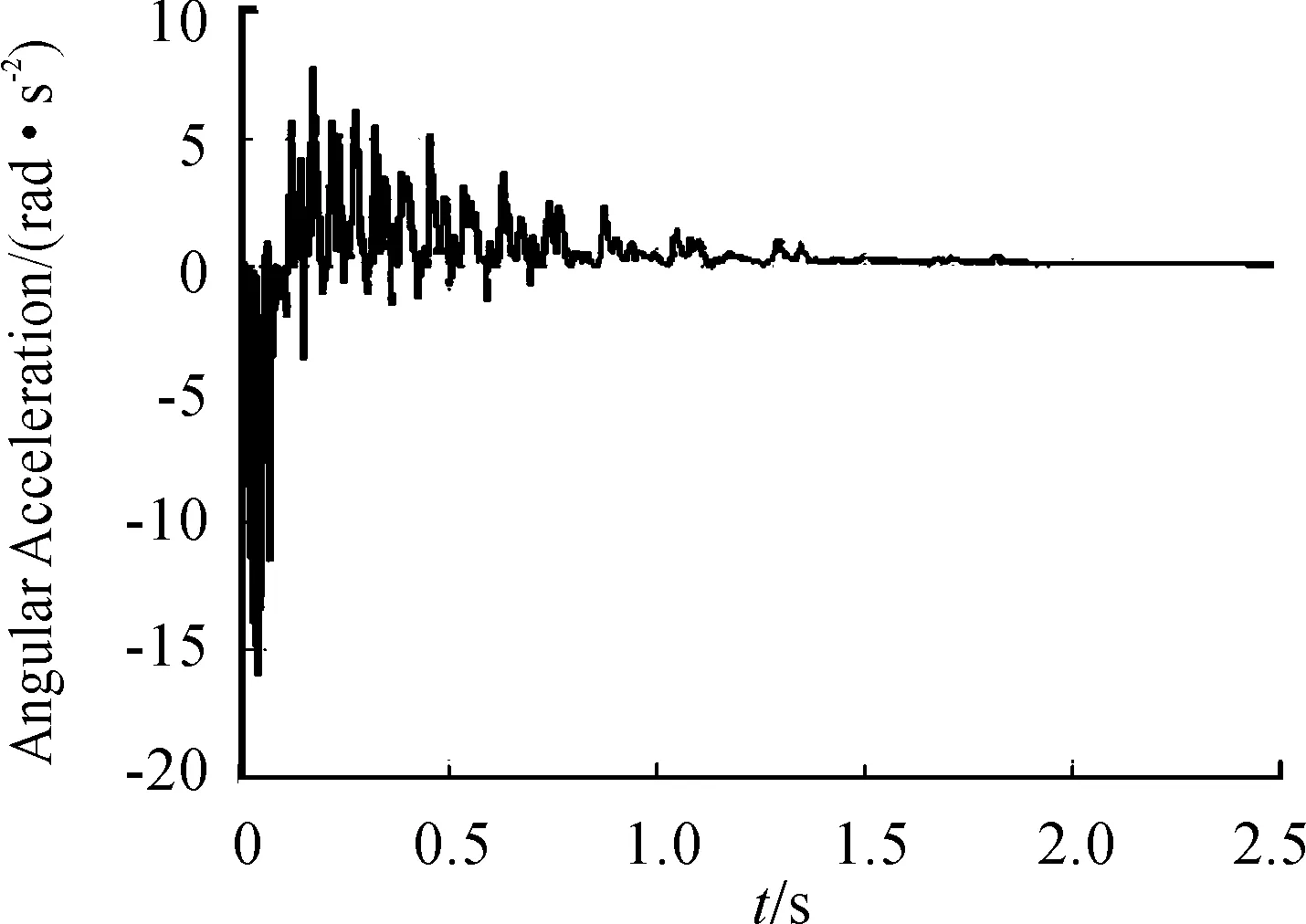
图16 武器系统方向位置角加速度曲线
从图13~图16可知,方向电机在开始调速时的指令转速是方向电机最大的设计转速208 rad/s。调速过程中,指令转速越来越小,最终趋向于0,而方向电机在0.1 s达到最高转速190 rad/s后,开始做减速旋转,直到2.5 s实际速度为0,此时系统的指令速度也为0,表示遥控武器站的方向系统在2.5 s后静止。图16表示武器系统方向位置的加速度变化,在开始快速响应时,最高加速度数值为15.6 rad/s2,小于设计的最高加速度的数值(本设计中武器系统方向位置角加速度的最大值为18 rad/s2),响应时间区域为0~0.1 s,减速时间区域为0.1~2.5 s,其中1.5~2.5 s之间加速度很小,直到2.5 s时加速度为0。方向电机在0.1 s电机达到最高速及加速过程终止开始减速时,抖动现象明显。武器系统在方向位置转动时出现小幅脉动,其原因主要由于减速器模型、方向机蜗轮蜗杆中的齿轮接触碰撞引起。
4 结论
本文运用Simulink建立了遥控武器站位置伺服系统控制方框图,仿真结果表明在电流环为PI控制的前提下,位置环采用复合前馈控制、速度环采用模糊PI控制系统的鲁棒性较好,响应快速并且无超调,抗干扰能力强。ADAMS的机械部分与Simulink控制部分联合仿真,所设计的遥控武器站满足设计要求。
参考文献:
[1]JAMES P Q.Dual Elevation Weapon Station and Method of Use:United States Patent,US7493846[P].2009.
[2]王传有.遥控武器站结构形式对武器性能影响[J].火力与指挥控制,2014,39(5):52-59.
[3]李辉.某车载遥控武器站的初步研究[D].南京:南京理工大学.2009.
[4]王耀辉.PID控制原理简析[J].洁净与空调技术,2013(3):79-82.
[5]WANG L X.Adaptive fuzzy systems and control[M].Prentice-Hill Press.2014.
[6]杨菲.基于MATLAB的模糊自适应PID控制器的设计与仿真[J].信息与电脑(理论版),2011,4(9):32-39.
[7]邹金红.基于复合前馈控制的交流位置伺服系统动态特性[J].电机与控制应用,2011(1):48-53.
[8]王金鹏.俯仰翻转运动控制系统设计及控制性能研究[D].成都:西南交通大学,2014.
[9]GUO X G.A high-speed positioning method for servo systems.Int J Adv Manuf Technology[J].2013,(21):1021-1028.
[10]ZHU CHUNXIAN.Dynamics simulation for flexible parallel robot[C].IEEE International Conference on Robotics and Biomimetics.IEEE Press.2007:2155-2159.
(责任编辑周江川)
doi:【装备理论与装备技术】10.11809/scbgxb2016.06.003
收稿日期:2016-01-08;修回日期:2016-02-15
作者简介:郭华新(1988—),男,硕士研究生,主要从事智能武器技术与工程研究。
中图分类号:TJ02
文献标识码:A
文章编号:2096-2304(2016)06-0010-06
CascadeCompoundControlandItsCo-SimulationofACPositionServoSystemofRemoteControlledWeaponStation
GUOHua-xin,HELei,CAOChu-qing,ZHOUKe-dong
(SchoolofMechanicalEngineering,NanjingUniversityofScience&Technology,Nanjing210094,China)
Abstract:A new type of remote controlled weapon station (RCWS) was designed, in which the compound feedforward control and the fuzzy PI control strategy were applied to position loop and speed loop controller of AC position servo system of remote controlled weapon station respectively, and the cascade compound controller of permanent magnet synchronous motor position servo system was composed. This structure could not only solve the system interference caused by the position and velocity variables based on the PID control, but also improve the dynamic tracing accuracy. The mechanical dynamic model and co-simulation platform of remote controlled weapon station were built by ADAMS and Matlab/Simulink, and the feasibility of the mechanical and electrical system was validated by the simulation calculation. The obtained results provide a certain foundation for the further study of remote controlled weapon station.
Key words:remote controlled weapon station; position servo system; cascade compound control; co-simulation
