基于STM 32单片机的舰船玻璃去雾系统设计与实现
2016-08-02郑颢轩
郑颢轩
(中交第二航务工程勘察设计院有限公司,武汉 430070)
基于STM 32单片机的舰船玻璃去雾系统设计与实现
郑颢轩
(中交第二航务工程勘察设计院有限公司,武汉 430070)
论文介绍基于STM 32和改进模糊控制算法的舰船玻璃去雾系统。该系统由PC机和STM 32单片机通过RS-485串行通信组成主从式结构,以船舶玻璃发热源为被控对象,实时监测和采集驾驶舱内露点温度、船舶玻璃温度,经过改进模糊控制算法对监测和采集参数运算之后,可以调节船舶玻璃发热源的工作状态,从而控制船舶玻璃温度,避免在各种冷湿环境下船舶航行时玻璃起雾、结霜,提高航行安全性。该系统具有相应速度快、节能减耗等特点。
1 引言
众所周知,海洋环境是变化莫测的,船舶视窗结霜、起雾会使视线受阻能见度下降。在船舶行驶过程中,保证船舶视窗的能见度非常重要。
露点是空气保持某一定湿度必须达到的最低温度。温度低于露点时,空气湿度不会再升高,多余的水分会在玻璃及其他物体表面上起雾或结霜。本系统从起雾的根本原因出发,对驾驶室内空气露点和船舶玻璃温度进行实时监测。系统采用改进的模糊控制算法对采样数据进行处理,对船舶玻璃温度进行快速的控制,使其始终保持在大于驾驶室内空气露点的状态,进而避免船舶玻璃起雾、结霜。
2 系统结构
本系统由PC机和STM 32单片机系统组成,通过RS-485串行通信组成主从式结构,使PC机对驾驶室的露点和视窗温度进行监控。系统选用温湿度传感器SHT15和温度传感器PT100,分别对驾驶室内露点和视窗温度进行探测,使用单片机处理经转换、放大、滤波后的信号,进行改进Bang-Bang控制算法处理,判断驾驶室内露点与船舶玻璃温度之间的关系,再由单片机系统通过加热装置驱动模块来调节玻璃上电阻丝的工作电压,以控制玻璃温度始终高于驾驶室内露点温度。系统总体结构如图1所示。
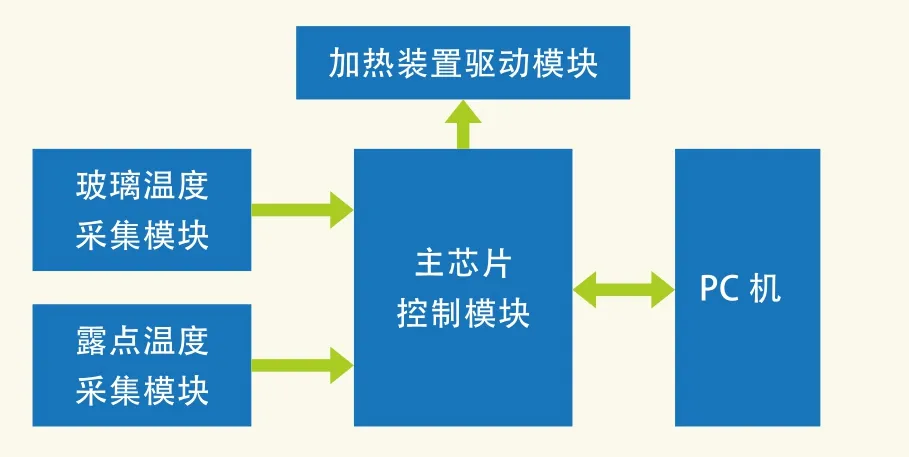
图1 系统总体结构示意图
3 系统硬件电路设计
3.1 主芯片控制模块
主芯片控制模块由单片机最小系统和串行通信两个部分组成。本文选用意法半导体生产的STM 32F103CBT6,其为32位CortexTM-M 3 ARM内核,有128KB内部FLASH和20KB静态RAM,具有10通道12位内部AD。单片机最小系统(见图2)除了必须的复位、时钟和电源电路,还有4线SWD调试电路和内部AD采集电路。其作用为接收和处理采集到的数据并上传给PC机、完成相应的算法以输出控制信号。
3.2 玻璃温度采样模块
温度传感器选择具有抗震动、稳定性强、线性度好、准确度高等优点的热电偶PT100。温度在0~100℃之间变化时,最大非线性偏差小于0.5℃。其电阻可随着温度增加基本成匀速增长。但PT100铂电阻与温度之间还是非线性的关系,考虑到船舶在海上航行所能遇到的环境温度为-40℃~50℃,电阻值在该范围内与温度的计算公式如式(1)、式(2)所示。

式中:Rt-PT100电阻值,单位为Ω;Ro-PT100在0℃时的电阻值,为100Ω;
A-一阶温度系数,A=3.90802×10-3℃;
B-二阶温度系数,B=-5.802×10-7℃;
C-三阶温度系数,C=-4.27350×10-12℃。
由于PT 100的电阻值与温度之间不是线性关系,实际工作中需要进行线性补偿。
如果用实际曲线的割线作为线性拟合直线,我们将实际特性曲线与拟合直线之间的偏差称为传感器的非线性误差,取其中最大值(设为)与输出满量程值之比作为评价非线性误差的指标,称之为非线性。

式中:e-非线性;
如温度测量范围为0℃~Tm℃,那么线性拟合直线的方程为:

非线性绝对误差的方程为:


非线性为:

在0℃~100℃范围内,当t=50℃时,△达到最大值,△max=0.29Ω,PT100的非线性为0.756%。本系统设计指标温差在±0.5℃范围内,那么需要对这一部分的非线性进行补偿。通常有硬件电路补偿和软件补偿两种方法。

图2 单片机最小系统电路图
本系统温度转换采用软件补偿方法进行非线性补偿。
由于传感器输出信号较弱且易受外界干扰,需对输出信号进行放大及滤波调理。对温度传感器需将铂热电阻信号转化为电压信号。恒流源通过检测铂热电阻PT l00两端的电压变化量获得温度信号。在恒流源采样变换电路输出两个电压值,其差值需要进行放大处理。两级差分放大电路可实现此功能。温度传感器及其前置放大电路如图3所示。

图3 温度传感器及其前置放大电路
3.3 露点温度采集模块
SHT l5是瑞士Sensirion公司推出的一款数字温湿度传感器芯片。其内部的温度传感器由能隙材料PTAT(正比于绝对温度)研发而来,具有极好的线性。可用式(7)将温度数字输出SOT转换为温度值。为获取精确的湿度的测量数据,用式(8)将湿度数字输出SORH转换为湿度值,由于实际温度与测试参考温度25℃的显著不同,所以用式(9)对湿度值进行温度补偿得到精确湿度值。露点(Td)的计算方法很多,绝大多数都很复杂。对于本系统-40℃~50℃温度范围的测量,通过式(10)可得到较好的精度。

其中d1、d2为温度转换系数,d1=-40.1℃,d2=0.04℃;c1、c2、c3为 湿 度 转 换 系 数,c1=-2.0468,c2=0.0367,c3=-1.5955E-6。t1、t2为 温 度补偿系数,t1=0.01,t2=0.0008。Tn和m为露点计算参数,0℃~50℃时,Tn=243.12℃,m=17.62;-40℃~0℃,Tn=272.62℃,m=22.46。
SHTl5将温湿度感测、信号变换、A/D转换和I2C总线接口等功能集成到1个芯片上,接口线少,控制方式简单。
4 系统软件设计
本系统是从玻璃起雾的原因出发,以玻璃温度为控制对象。从理论上讲,当玻璃温度低于驾驶舱内露点时,玻璃就会起雾。但是通过在实验室内采用空调、加湿器、电吹风等辅助设备做了大量的实验,并且也查阅了一定的资料,得到实际上玻璃温度与露点的差值小于1.3℃的时候,玻璃就会起雾。那么控制算法要做到的便是使玻璃温度始终处于高于露点1.3℃的状态下,这样既达到去雾效果,又节能减耗。当系统刚开启或者环境突然有较大变化时,可能会出现玻璃温度远小于驾驶舱内露点的情况,为保证航行的安全,这时需要快速反应、快速给玻璃升温,当它们的差值达到1.3℃,要进入稳态时,需要较为精确的控制方法,确保系统精度。
4.1 模糊控制算法
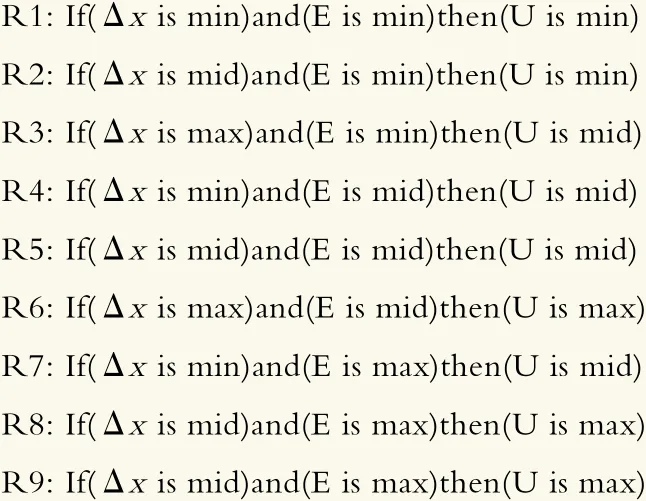
设计模糊控制器,是首先使模糊控制器的输入电压差分量Δx和电压变化量E进行模糊化,两个变量E的取值范围为(0. 1, 0. 9),Δx的取值范围为(0. 01, 0. 09)。为了简化算法,将Δx和E的取值范围对应转化为(0, 1),看作两个输入模糊集合,U设定为玻璃加热的模糊集合;μ(Δx)和μ(E)作为输入的隶属度函数。Δx的隶属度函数为:

其中μm in(Δx),μm id(Δx),μmax(Δx)分别表示为:

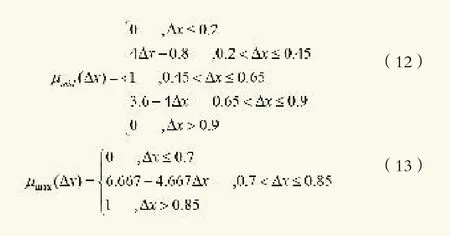
E的隶属度函数为:

其中μmin(e),μmid(e),μmax(e)分别表示为:
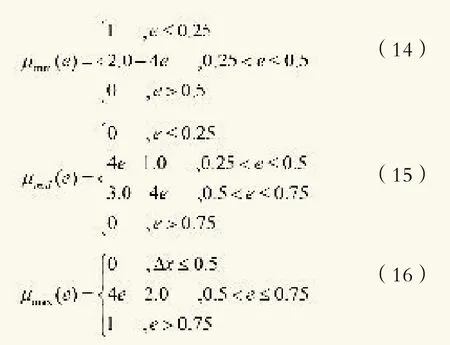
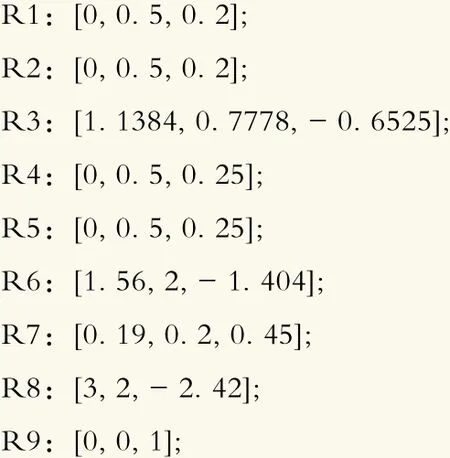
采用广义肯定式推理,建立船舶玻璃加热模糊控制器的推理规则R:
加热电压U的隶属度为:

通过实验确定[ p q r]参数为:
建立了输入输出的语言变量、隶属度函数和模糊规则后,需要确定模糊推理的合成规则。考虑到模糊推理为肯定式推理,这里采用“最大—最小”的模糊合成规则计算。
4.2 温控算法的流程
本文设计的船舶去雾系统,要达到快速去雾并且在系统稳定后玻璃始终处于无雾的清晰状态,以保证船舶行驶的安全,并且兼具节能的功能。本文将系统的玻璃加热装置的输出强度以工作电阻丝的数量分为3挡,依次为低档加热、中档加热、高档加热,由μmin、μmid、μmax分别表示,以玻璃温度和露点温度的差值作为输入值e(t),并引入输入值的变化率Δe(t),Δe(t)>0,表示差值在变大,Δe(t)<0,则表示差值在变小。
控制过程为:系统开启,首先,对系统进行初始化。然后,将温度传感器和露点温度传感器采集到的电压信号进行A/D转换和进一步的处理,输入到STM 32中。接着,用采集到的玻璃温度减去露点温度,得到差值,当差值大于零且呈增大趋势时,加热装置不工作;当差值大于零且呈减小趋势时,加热装置工作且置于低档加热模式;当差值小于或等于零且数值呈增大趋势时,加热装置工作且置于中档加热模式;当差值小于零或等于零且数值呈减小趋势时,加热装置工作且置于高档加热模式。使玻璃温度始终保持在大于露点温度的状态下。改进算法流程图如图4所示。
4 结论
传统的玻璃去雾系统只是在控制器FLASH中设定温度阈值,以此与检测的玻璃温度相比较,然后进行对玻璃的加热去雾。本系统从玻璃起雾的原因出发,实时检测驾驶室内露点及船舶玻璃温度;采用基于模糊控制算法,响应速度快,实时控制,并具有很高的精度;采用3组电阻丝分组加热,在保证去雾效果的同时,更加节能。
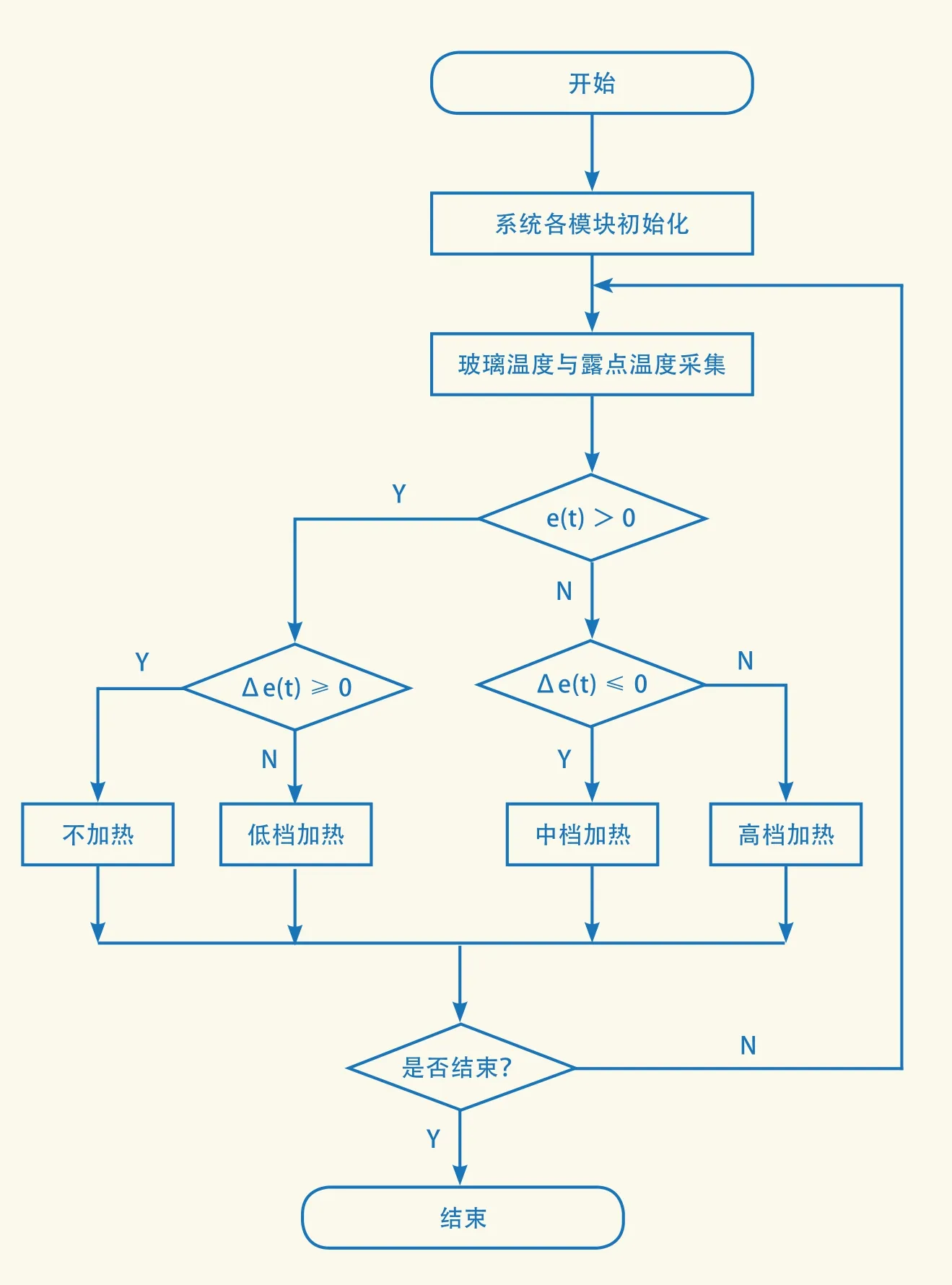
图4 温控算法流程图
[1]朱鹏浩.大船感玻璃去雾系统的研究与设计[D].武汉:武汉理工大学硕士学位论文,2013.
[2]金永兴,武晓云.新世纪航海技术的展望[J].中国航海,2002(1):l-6.
[3]侯馨光.21世纪舰船自动化[J].机电设备,1999(3):11-14.
[4]张旭,李迪阳,孙建波等.传播机舱监测报警系统[J].计算机工程与应用,2005(22):229-232.
[5]乐美龙,朱文蔚.集成船桥系统的现状与未来[J].船舶工程,2000(5):51-53.
[6]李晓妮.单片机温度控制系统的设计[J].九江:九江学院学报(自然科学版),2005(2):20-23.
[7]王忠显.智能化电能参数测试仪[J].煤炭技术,2003,22(3):23-24.
[8]袁宝歧.加热炉原理与设计[M].北京:航空工业出版社,1989.
[9]李刻杰.传感技术[M].北京:北京理工大学出版社,1989.
[10]陈杰,黄鸿.传感器与检测技术[M].北京:高等教育出版社,2002.
[11]张明峰.PIC单片机入门与实践[M].北京:北京航空航天大学出版社,2004.
[12]王冬霞,张玉辉,洪耀球. 温湿度传感器SHT15及其在嵌入式系统中的应用[J].电子设计工程,2011,19(2):40-43.
[13]张朝祥,许伟明.基于模糊控制理论的智能雨刷控制器[J]. 计算机测量与控制,2011(19):309-311.
this paper introduces a ship glass defogging system based on STM 32 singlechip and improved fuzzy logic control. This system consists of PC and STM 32, form a master-slave structure by RS-485 serial communication protocol. It uses ship glass heat source as controlled object, monitors and gathers dew point temperature in cockpit and temperature of ship glass. Calculated by improved fuzzy logic control algorithm, the arguments are used to regulate the state of ship glass heat source to avoid fogging or frosting when sailing in various cold wet environments, enhancing the navigation security. This system has advantages including rapid response, energy-saving and cost-reducing.
STM 32;模糊控制;船舶去雾;露点温度
STM 32; fuzzy logic control; ship defogging; dew point temperature
