一种经济实用型智能网球发球器的设计与实现
2016-07-29刘丰年三门峡职业技术学院信息传媒学院河南三门峡472000
刘丰年(三门峡职业技术学院信息传媒学院,河南三门峡472000)
一种经济实用型智能网球发球器的设计与实现
刘丰年
(三门峡职业技术学院信息传媒学院,河南三门峡472000)
摘 要:为解决网球爱好者在进行网球训练时缺乏陪练或陪练技术发挥不稳定的问题,设计了一种以STC12C5A60S2单片机和舵机为核心的经济实用型智能网球发球器。该网球发球器使用单片机控制技术,采用舵机进行伺服驱动,可以自动调节发球的角度和时间间隔。实验表明,该发球器简易、便携、经济、实用,对于纠正学生错误动作、缩短学习动作的泛化和分化阶段时间、快速达到自动化具有很好的实践效果,对于提高网球教学质量和网球运动的普及具有较大的促进作用。
关键词:网球;发球器;STC12C5A60S2单片机;舵机
D01:10.19329/j.cnki.1673-2928.2016.04.007
0引言
伴随着网球运动在我国的迅猛发展,很多高校的体育院系已经开设了网球专业,并且也成了公共体育选修课之一。网球专业学生和公共体育课学生在训练时,一般需要至少一名陪练,但往往由于缺少陪练人员,或者陪练的发球力度、角度、远近距离及球的旋转等技术发挥不稳定,导致训练效果欠佳。网球训练者要想在短时间内快速提高网球技术,就必须借助智能网球发球器强化规范训练。而传统的网球发球器价格高、易损坏、使用不方便,在一定程度上影响了网球训练的效果。因此急需一种简易、便携、经济、实用的智能化网球发球器。
本文设计并实现了一种以STC12C5A60S2单片机和舵机为核心的经济实用型智能网球发球器。该网球发球器使用单片机控制技术,采用舵机进行伺服驱动,可以自动调节发球的角度和时间间隔。对于纠正学生错误动作、缩短学习动作的泛化和分化阶段时间、快速达到自动化具有很好的实践效果,对于提高网球教学质量和网球运动的普及具有较大的促进作用。
1系统总体结构设计
在对网球训练技术特点和发球要求进行认真分析的基础上,结合网球爱好者训练时遇到的实际问题,本文设计的经济实用型智能网球发球器的结构示意图如图1所示:
由图1可以看出,本文设计的经济实用型智能网球发球器包括10部分。1为下球槽出球挡板,控制和减缓网球在出口处时的速度和前冲力,可以拆卸,2为下球槽,分前段和后段,中间由挡球板相隔,是球的滑道,倾斜度可以调整,3为斜面顶板,将球顶出翻越挡球板,4为挡球板,阻止球暂停,5为触发连杆一,是触发器和顶板的连杆,6为触发器,该触发器为定时触发器,是核心装置,按照一定的时间间隔驱动连杆,7为储球筐,储存网球,8为触发连杆二,在触发器的控制下定时驱动,防止两个球同时滚落至储球筐下端卡在一起,9为支架,高度可以调节,10为底座。
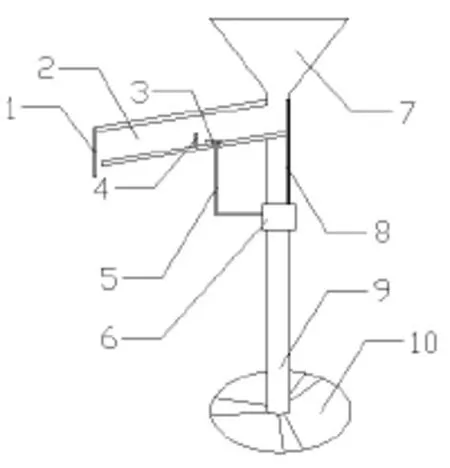
图1 本文网球发球器的结构示意图
在网球训练中,将网球放入储球筐内,所放置的网球会靠重力作用依次向下传送,当网球进入下球槽时,由于下球槽是斜面设计,网球会向下依次滚动,网球至下球槽中段将被挡球板所阻拦,并依次排列。被挡球板4阻拦的最下端的网球,顶板刚好在其后下方,顶板固定在触发连杆一上,触发连杆一固定连接在支架上端的触发器上。触发器设置触发的时间间隔为2~20秒,优选的触发器时间间隔为10秒,并依靠电池功能,通过触发连杆一上端顶板将下球槽最下端的网球推送翻越下球槽中段挡球板,此网球将沿下球槽滚动出后,会随惯性略有些前冲落地,落点固定,弹跳适中,可以通过调整支架的高度,来控制球的弹跳高度。同时,出口处的出球挡板可以控制和减缓网球在出口时的速度和前冲力,来适合网球水平更低的初学者。为防止储球筐下端出现卡球现象,触发器将通过连杆二定时向上推动,使卡在一起的球落下。
2系统硬件设计
本文设计的经济实用型智能网球发球器的硬件主要包括触发器和支架。支架设计比较简单,而这里所说的系统硬件设计主要是指触发器的硬件设计。
触发器硬件设计采用了模块化设计方法,各模块相对独立,具有特有的功能,待各模块设计测试完成后,再进行连接调试,该方法大大降低了系统硬件设计的复杂度。触发器硬件模块主要包括:控制器模块、动作触发模块、按键模块和显示模块。触发器基本模块框图如图2所示。
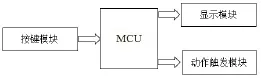
图2 触发器基本模块框图
2.1控制器模块设计
控制器主要用于对动作触发电路的控制,其中舵机的角度控制是重点。除此之外还有键盘模块和显示模块的控制。
由于舵机的控制一般都采用脉冲宽度调制(PWM)方式。在对各种单片机进行比较之后,本文选择了自带2路PWM的STC12C5A60S2作为控制核心,对数据输入和实时显示以及动作触发装置进行控制。
STC12C5A60S2是增强型的8051单片机,具有低功耗、高速、超强的抗干扰能力,指令代码完全与8051兼容,内部集成了MAX810专用复位电路,1280字节的RAM,8路高速10位A/D转换,2路PWM,共有4个16位定时器,7路外部中断I/O口,3个时钟输出口。
2.2动作触发模块设计
舵机与一般的直流电机相比,舵机可以作为最基本的输出执行模块,广泛地应用在微小系统和航模中,而直流电机只能通过复杂的机械结构来对直流电机进行速度的控制,且不利于对角度要求高的控制电路中,所以在触发上选择舵机。
舵机的运行需要一个基本的脉冲,而脉冲的高电平的时间决定了控制脉冲所对应的角度,对应的控制关系如表1所示。
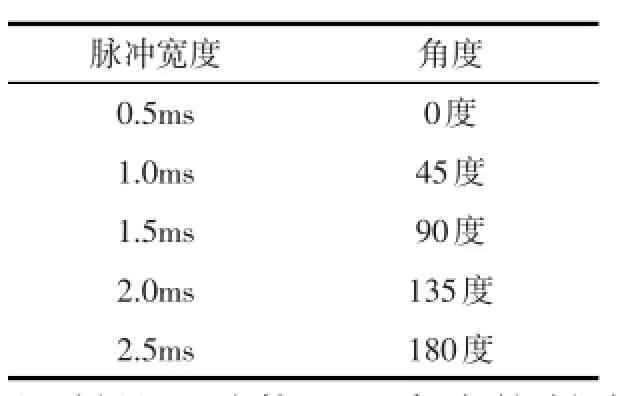
表1 舵机脉冲宽度与角度对应关系
脉宽调制是一种使用程序来控制波形占空比、周期的技术,STC12C5A60S2单片机的PCA模块可以通过程序设定,使其工作于PWM模式。可调制脉冲宽度输出模式如图3所示。

图3 可调制脉冲宽度输出模式
输出频率取决于PCA定时器的时钟源。PWM的频率=PCM时钟输入源频率/256。
为了实现可调频率的PWM输出,选择定时器0的溢出率或者ECI脚的输入作为PCA/PWM的时钟输入源。
当EPCnL=0及CCAPnL=00H时,PWM固定输出高。
当EPCnL=1及CCAPnL=0FFH时,PWM固定输出低。
2.3键盘及显示模块设计
本文设计的经济实用型智能网球发球器显示模块采用动态显示方式驱动2个七段数码管,分别显示设定值的十位、个位。数码管采用共阴极。按键模块主要包括3个按键,分别是:确认键、左右选择键、+/-调节。
3系统软件设计
软件设计利用STC单片机的PCA来产生一个PWM信号作为舵机的控制信号,简单地说就是利用PWM占空比的变化来改变舵机的旋转角度。PWM信号通过舵机的控制信号通道到达控制芯片,获得一个工作电压(偏置电压),而舵机自身有一个基准电路,将获得的偏置电压与基准电路的电压比较,得到一个电压差的输出,电压差的输出决定了舵机的正反转,当电机转速达到设定值时,通过减速齿轮带动电位器旋转,这时压差为0,舵机停止动作。
主程序流程图如图4所示。

图4 主程序流程图
4系统测试
系统在keil c51和proteus v8.0软件仿真环境下开发,编程过程中利用软件仿真调试系统,当软件仿真通过则利用该仿真器仿真,并按顺序检查错误进行修改,最终将程序的HEX文件烧录进入单片机进行实测。
网球发球器测试电路如图5所示。
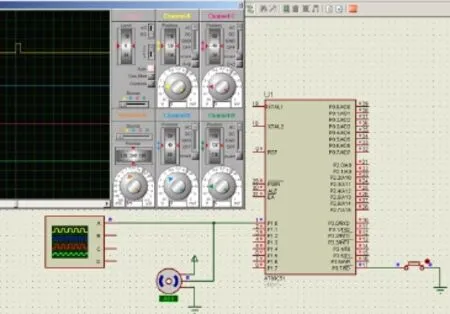
图5 网球发球器测试电路
网球发球器部分实物图如图6所示。
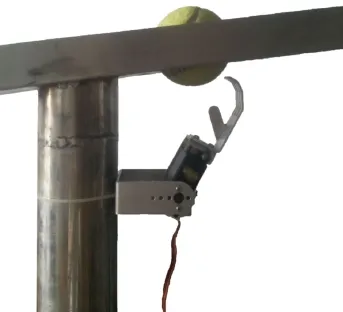
图6 网球发球器部分实物图
该智能网球发球器已在我校网球选修课上投入使用,发球的速度、高度、力度均可以根据学生的需求进行调整,满足了网球爱好者的训练需求,提高了训练质量。
5结束语
在对网球爱好者进行训练时存在的主要问题进行分析的基础上,本文设计并实现了一种以STC12C5A60S2单片机和舵机为核心的经济实用型智能网球发球器。该网球发球器使用单片机控制技术,采用舵机进行伺服驱动,可以自动调节发球的角度和时间间隔。对于纠正学生错误动作、缩短学习动作的泛化和分化阶段时间、快速达到自动化具有很好的实践效果,具有一定的推广应用价值。
参考文献:
[1]蔡美琴.MCS-51系列单片机系统及其应用[M].北京:高等教育出版社,2005.
[2]王彦.全国大学生电子设计竞赛训练教程[M].北京:电子工业出版社,2010.
[3]李梦红,李捍东.基于STC89C52单片机的无线遥控小车设计[J].自动化与仪器仪表,2015(6):34-37.
[4]赵志刚,骆志伟.电动舵机伺服控制器控制律的优化设计[J].微特电机,2015(2):123-126.
[5]刘玉晓.“网球训练器”创新高效网球教学模式[J].电子制作,2015(18):156-1159.
(责任编辑:郝安林)
中图分类号:TM341
文献标志码:A
文章编号:1673-2928(2016)04-0017-03
收稿日期:2016-02-26
作者简介:刘丰年(1982-),男(汉族),河南三门峡人,三门峡职业技术学院教师。