二轴桁架机器人的设计及实现
2016-07-29张豪
张 豪
(无锡职业技术学院控制技术学院,江苏无锡,214121)
二轴桁架机器人的设计及实现
张 豪
(无锡职业技术学院控制技术学院,江苏无锡,214121)
摘要:对二轴桁架机器人的总体设计进行了研究。介绍了二轴桁架机器人的机械结构和运动方式、PLC控制的工作原理及系统软硬件设计。由于二轴桁架机器人具有高可靠性、高速度、高精度等特点,因此非常适合智能工厂,物流系统行业的应用。
关键词:二轴桁架机器人;控制系统;可编程序控制器;伺服系统;人机界面
0 引言
桁架机器人,是能够实现自动控制的、基于空间XYZ直角坐标系可重复编程的、多自由度的、适合不同任务的自动化设备。桁架式机器人改变了传统的物流方式,有效地改善了作业环境,提供零件加工数字化、信息化、少人化直至无人化管理,可靠地保证了产品质量,极大地提高了劳动生产率,将工人从繁重的体力劳动中解放出来,使现代制造技术达到一个崭新的水平。
桁架式机器人的特点:多自由度运动,每个运动自由度之间的空间夹角为直角;自动控制的,可重复编程,所有的运动均按程序运行;一般由控制系统、驱动系统、机械系统、操作工具等组成;灵活,多功能,因操作工具的不同功能也不同;高可靠性、高速度、高精度;可用于恶劣的环境,可长期工作,便于操作维修;各个机器人行走轴,均可采用滚动直线导轨或滚轮V型导轨,具有安装调试方便,适合长行程应用,可用于恶劣环境等优点。
基于智能工厂的最典型的二轴桁架机器人,提出了机械结构总体设计以及控制系统的设计,经过工业现场实际运作良好,同时具备较高的推广价值和实际意义。
1 二轴桁架机器人总体概况
如图1所示,是智能工厂现场的二轴桁架机器人。

图1 工业现场二轴桁架机器人
1.1桁架机器人机械结构
桁架机器人主要由1-Z轴减速机组件、2-X轴减速机组件、3-竖梁组件、4-移动机构组件、5横梁组件、6-地脚板焊接件、7-V型支架、8-机器人支架,以及相关标准件组成,如图2所示。桁架机器人通过地脚螺栓固定在工业现场,机械手通过X轴作横向运动,Z轴作上升下降的垂直运动,X轴的距离表示工件搬运的距离,如果工件尺寸大,那么Z轴运动的距离可大些,如果工件尺寸小,Z轴运动的距离可相对小些。
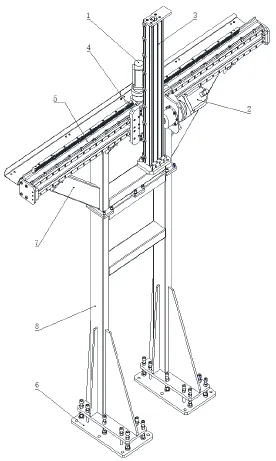
图2 桁架机器人机械结构图
1.2桁架机器人主体机械结构
桁架机器人主体机械结构主要由导轨、齿条、横梁、横梁驱动减速机、滚轮、润滑轮、信号灯、拖链槽、X轴拖链、Z轴拖链、端盖/限位器、竖梁、托板、润滑系统等组成。
2 控制系统设计
该桁架机器人控制系统由硬件和软件两大部分组成。桁架机器人控制原理图,如图3所示。
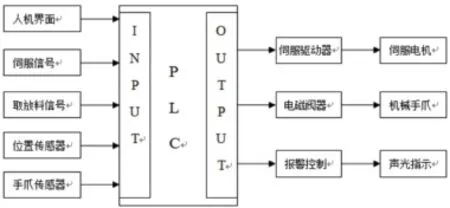
图3 桁架机器人控制原理图
3 结论
本文根据智能工厂的生产实际,设计了二轴桁架机器人。该机器人的运动空间广,承载力强,能够满足工业现场搬运零件的要求。并且对机器人的机械结构进行了总体设计,保证了运动精度和稳定性。最后对机器人的控制系统进行了设计,以PLC为控制系统的核心,通过控制两台伺服驱动器完成机器人的Z轴和Z轴控制。实践表明,以PLC为控制系统的二轴桁架机器人具有高可靠性、高速度、高精度的显著特点。此外,该机器人拥有较高的性价比,在智能工厂,物流系统行业应用前景广泛。
参考文献
[1] 王占军,赵玉刚,刘新玉,直角坐标型机器人机械结构与控制系统的设计[J].制造业自动化,2015(2):18-19.
[2]宣自洋,陈书宏,常凯,基于PLC控制的变速器搬运机械手系统设计[J].制造业自动化,2015(2):6-8.
[3]刘全胜,张豪,自动车库的设计及实现[J].组合机床与自动化加工技术,2008(12):86-88
[4]Brugali D, Shakhimardanov A. Component-Based robotic Engineering(Part II) [J].IEEE Robotics & Automation Magazine,2010,10(3):100-112
[5]Ma Q, Zou Y, Zhang T.Study of service robot architecture based on middleware and abstract environment[A].2012 IEEE International Conference on Robotics and Biomimetics. Guangzhou[C].2012:1200-1205.
[6]倪森寿,张豪等,机械技术基础[M],北京:人民邮电出版社,2009
[7]张铮,张豪等,机电控制与PLC[M],北京:机械工业出版社,2008
中图分类号:TP24
文献标识码:A
Design and Implementation of Bi-axis Truss Robot
Zhang Hao
(School of Control Technology,Wuxi Institute of Technology,Wuxi,214121,China)
Abstract:The overall design of bi-axis truss robot is studied. Mechanical structure of bi-axis truss robot and the mode of motion,the working principle of PLC control and design for the hardware and software in the kind of system.The bi-axis truss robot can be widely used in the intelligent plant and logistics system industry due to its high reliability,speed and precision.
Keywords:bi-axis truss robot;control system;PLC;servo system;human-computer interface
