管道机器人专利技术综述
2016-07-20李雅娟
李雅娟
摘 要 管道在各行业都有广泛的应用,然而管道内部的环境往往不易接触,因此,对于管道内的清洁、检修等成了工业生产中的难题。随着近年来机器人技术的迅猛发展,管道机器人逐渐成为管内作业的主要途径。本文通过对管道机器人领域专利文献的收集、标引和梳理,分析了该领域技术分布情况、历年申请量趋势,并梳理了该领域的发展脉络。
关键词 管道机器人;行走;蠕动;结构
中图分类号 C18 文献标识码 A 文章编号 1674-6708(2016)164-0156-02
1 管道机器人技术概述
由于实际生产生活中,所采用的管道千差万别,因此,运行在不同管道内的管道机器人的尺寸,结构,驱动形式等方式也各有不同。对管道机器人具体结构形式的研究,从管道机器人被提出的伊始就成为研究的焦点[1]。通过管道机器人结构形式领域的专利文献样本分析可知,管道机器人根据其结构形式可以主要分为行走式,蠕动式,其他结构式。行走式结构又可分为轮式、履带式与步伐式;蠕动式可分为连杆式、多节连接以及柔性;其他结构式可分为游动式、被动压差式、复合式等。
2 全球主要国家专利申请情况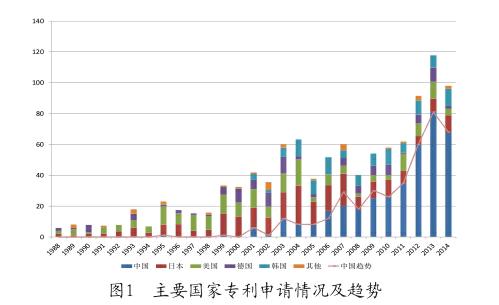
由全球专利申请分布可以看出,1990年之前涉及管道机器人结构领域的全球专利申请数量非常少。1995年之后,全球专利申请数量整体上处于一个逐步增长的水平,2008开始全球专利申请量持续呈现快速增长态势。中国对于管道机器人结构的研究起步较晚,从1990年之后才开始有申请量,2000年之后,申请量开始快速增涨,与全球专利申请量分布情况的整体趋势基本一致。从2008年开始,中国专利的申请量几乎已经与他国专利申请总量相近,究其原因,主要是在2005年之后,欧美、日本等国对管道机器人的结构方面研究已经趋于成熟,大部分专利申请已经转向控制、总体系统布局等。因此,在2005年,国外专利申请总量相较于国内较少。
3 管道机器人结构技术发展路线
3.1 行走式机器人技术发展路线
行走式是最早出现的管道机器人结构之一,由于构造简单、行走速率高,一直是管道机器人中结构形式研究最多,发展最为成熟的方向之一。20世纪七八十年代出现了最早的简单轮式管道机器人,一般用于核工业管道的清洁排污等作业。20世纪90年代之后,由于机器人技术的迅猛发展,轮式管道机器人的专利文献数量增涨较大;1995年之后,对行走式机器人的研究开始集中在如何适应不同环境。2000年之后,计算机技术、传感技术的成熟,使得管道机器人的功能更加强大完善;2005年至今,日本、美国专利对管道机器人的研究趋向于各种控制方式,通过搭载图像采集、温度、力传感等部件实现不同指标的采集作业,而对结构方面的研究文献量有所下降。在行走式管道机器人中以轮式行走机器人发展最为迅速,下图为轮式机器人的典型专利文献的详细技术方案。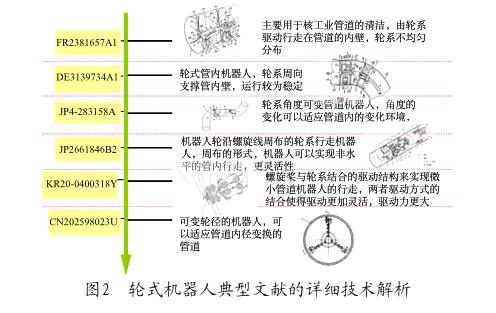
3.2 蠕动式机器人技术发展路线
行走式管道机器人在运行时必然与管道内壁发生接触,某些对管道内壁损伤要求严格的场合不宜采用。因此,模仿爬虫、蚯蚓等生物的运动方式,产生了蠕动式的管道机器人,其虽然与管道内壁仍有接触,但对内壁的损伤较小。蠕动管道机器人出现得较晚,20世纪90年代,对蠕动式的管道机器人专利文献才开始增多,该期段的蠕动机器人由于技术限制,其尺寸较大,灵活度不高,速率较低。20世纪90年代后,材料技术的发展,使得各种柔性材料在机械领域中大量应用,在一定程度上推动了蠕动管道机器人的发展,该段时间涌现了大量的核心专利,并趋向于向小型化发展。蠕动机器人由于对管壁伤害小,且具有一定的驱动行走能力,开始代替传统内窥镜在医疗领域中获得应用。2000年后,新的驱动方式进入机器人领域,例如,电磁、压电陶瓷、形状记忆合金等,新的驱动方式使得蠕动机器人在结构形式上有了更多的改变,2005年之后,国内对蠕动管道机器人的专利文献开始增多,主要集中于国内各大高校与研究机构,由于此时蠕动机器人运行结构趋于完善,更多专利文献转而研究其控制策略,以求获得更优的综合性能。下图为蠕动机器人的典型专利文献的详细技术方案解析图。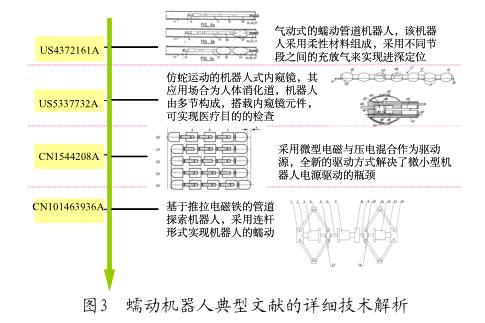
3.3 其他技术路线演进
除了上述2种方式外,管道机器人还包括其他如游动式、被动压差式以及多结构复合等结构。游动式机器人可以完全不接触管道内壁而实现行进,但其要求管内必须具备液体。而管道内的液体一般存在一定的流速,因此,对机器人的驱动力、游动速率都提出一定的要求。随着新的驱动形式产生,游动式机器人也出现了通过场力实现行进的方式。此外,由于人体腔肠内检查对安全性要求非常高,机器人的主动性能越高,可能存在越大的潜在风险。因此,继蠕动式机器人后,胶囊型机器人在人体腔肠领域应用渐广,其无动力或具有一定动力,通过食道进入人体,搭载内窥镜完成人体检查。
4 结论
经分析,管道机器人发展大致分为4个阶段:发展早期(20世纪90年代前后)提出了通过轮式行进的小车来实现在大管径管道内实现作业的想法。发展中期Ⅰ(至2000年左右)对早期提出的轮式机器人的改进;为了进一步避免与内壁接触带来的影响,开始转向研究蠕动式或其他类型的管道机器人。发展中期Ⅱ(2000—2005年)申请活跃期,该期的申请多元化发展,有早期的轮式机器人的进一步改进,也有各种新兴驱动形式所驱动的管道机器人。发展后期(2006—至今),结构形式技术领域研究已经日趋完善,专利申请转向各种管道机器人的具体结构关系、部件形式、控制系统等方面。
参考文献
[1]Mirats Tur J M,Garthwaite W.Robotic devices for water main in-pipe inspection:A survey[J].Journal of Field Robotics,2010,27(4):491-508.
