电动公交客车双电机驱动系统设计匹配及仿真研究*
2016-07-18蒋盛飞王哲孙晨乐章桐同济大学新能源汽车工程中心上海201804
蒋盛飞 王哲 孙晨乐 章桐(同济大学 新能源汽车工程中心,上海 201804)
电动公交客车双电机驱动系统设计匹配及仿真研究*
蒋盛飞王哲孙晨乐章桐
(同济大学 新能源汽车工程中心,上海 201804)
【摘要】针对目前大型电动公交客车驱动系统存在的不足,设计匹配一种双电机驱动系统。以某城市电动公交客车为研究对象,对电驱动系统进行参数选型匹配,并基于AVL-Cruise软件平台,搭建整车仿真模型,制定双电机驱动系统转矩分配控制策略,对车辆动力性和经济性进行仿真计算分析。结果表明,该双电机驱动系统参数匹配合理,使车辆具有良好的动力性;该双电机驱动系统可通过转矩优化分配控制策略有效改善车辆的经济性。
主题词:电动公交客车双电机驱动系统动力性经济性
1 前言
电动公交客车作为一种新型的公共交通运输工具,具有节能环保的优点,是公共交通领域未来的发展趋势[1、2]。城市公交客车固定速比的单电机驱动系统很难同时兼顾车辆低速爬坡时的大转矩需求以及高速行驶时的高转速需求,目前的一种解决方案是在电机与驱动轮之间增加变速器,而目前国内变速器技术仍不成熟,车辆动力系统的故障率较高。另外,AMT会存在换挡冲击及动力中断问题,AT则有效率低的缺陷[4]。
另一种方案是采取2个大功率的电机进行动力耦合来完成驱动。这种方案的缺点为:两个大电机增加了驱动系统的成本及空间布置难度;在道路拥堵的城市工况下,车辆行驶车速低,功率需求小,驱动系统长时间处于功率冗余的状态,造成浪费。同时也由于低转速、低负荷状态下电机的效率较低而影响车辆的经济性。所以,仅仅为满足少数极限工况而选取两个大功率电机的方案值得商榷。
但双电机驱动相对单电机的明显优势在于动力系统的可靠性得到提高,即当其中一个驱动电机发生故障后,车辆仍可由另一个电机完成驱动,故双电机方案的安全系数较高,其对公共交通车辆尤为重要。因此,本文针对目前电动公交客车驱动系统的特点及不足,研究一种兼顾动力性和经济性以及可靠性高的双电机耦合驱动方案。
2 双电机耦合驱动系统结构特点
动力耦合方式大体上可分为转速耦合、转矩耦合以及功率耦合3大类。转矩耦合一般采用定轴齿轮式,耦合传动结构简单,可靠性高。转速耦合和功率耦合主要采用行星齿轮机构,利用行星齿轮可拥有两个自由度的结构特性,在没有无极变速器的情况下可实现车辆的无极变速[5~7],丰田Prius就是典型的功率分流耦合结构。
针对电动公交客车驱动系统设计一种基于行星齿轮变速机构的双电机转矩耦合方案,其结构示意如图1所示。在此耦合系统中,电机1、2分别布置在行星齿轮两侧,电机1的一端与行星架相连,另一端与耦合系统的输出轴相连,电机2与太阳轮相连,也可通过离合器2与行星架相连,此时行星齿轮耦合机构相当于一根传动轴,传动比为1,两个电机之间通过行星齿轮变速机构来完成动力耦合。齿圈通过离合器1的接合与分离来改变运动自由度。耦合机构通过离合器1、2的接合与分离来改变传动速比。
行星齿轮各部件之间的转矩、转速特性满足:
式中,k为齿圈和太阳轮的齿数比;nt、Tt分别为太阳轮的转速和转矩;nq、Tq分别为齿圈的转速和转矩;nj、Tj分别为行星架的转速和转矩。
针对此双电机耦合系统的结构特点,提出3种工作模式。
a.模式1
车辆在起步加速或低速爬坡时,离合器1接合,离合器2分离,行星齿轮完成减速增扭,以保证车辆的大扭矩需求,则有
式中,T、n分别为耦合机构输出轴的转矩和转速;T1、n1分别为电机1的输出转矩和转速;T2和n2分别为电机2的输出转矩和转速。
b.模式2
当电机2的转速达到一定值后,离合器1分离,电机2转速降低至与电机1相近时,离合器2接合,此时行星齿轮以固定轴式传动,其传动比为1,以确保车辆高速行驶时电机2能继续提供动力输出,此时有
c.模式3
车辆低速行驶或定速巡航工况时,需求功率较小,此时可采用单电机驱动,离合器1、2都处于分离状态,电机1单独驱动车辆,电机2则变成自由状态。此时耦合系统的动力输出为:
3 双电机耦合驱动系统参数匹配
驱动系统的参数匹配针对给定车型、目标工况以及基本控制策略,在保证车辆动力性要求的前提下进行设计计算[8]。参数匹配主要包括两台工作电机的性能指标设计以及行星齿轮耦合机构的传动比设计。
驱动电机的选型包括电机的峰值功率、额定功率、最高转速、额定转速、峰值转矩以及额定转矩等参数[9]。其中,电机的额定功率原则上要满足车辆以最高车速行驶时的功率需求,因此对于该双电机耦合驱动系统两台电机耦合后的额定输出功率应满足最高车速行驶时车辆的需求功率,即
式中,Pe为耦合驱动系统的额定输出功率;P1e为电机1的额定输出功率;P2e为电机2的额定输出功率;vmax为最高车速;η为耦合驱动系统到车轮的效率;m为整车满载质量;f为滚动阻力系数;Cd为空气阻力系数;Af为迎风面积。
电机最高转速由车辆最高车速的设计指标即耦合驱动系统的最高输出转速来确定,则有
式中,nmax为耦合系统的最高输出转速;n1max为电机1的最高输出转速;n2max为电机2的最高输出转速;i0为主减速器传动比;r为车轮滚动半径。
驱动系统还要满足车辆低速(10 km∕h)爬坡时的动力需求。对于该耦合机构,当离合器1接合、离合器2分离时,驱动系统达到最大转矩输出。
式中,Tmax为耦合系统的最大输出转矩;T1max为电机1的峰值输出转矩;T2max为电机2的峰值输出转矩;α为道路坡度;n2_0为电机2的基速;v1为爬坡车速。
基于以上理论分析,针对某款城市公交客车进行实例匹配计算。目标车辆的基本参数以及相关动力性指标如表1所列。

表1 整车基本参数与动力性能指标
由于双电机耦合系统中行星齿轮机构的速比参数k存在一定的可调范围,故两个电机的匹配选型可存在多种组合方案。从降低成本及减小控制难度等方面考虑,选择两款相同性能的电机,最终选型结果如表2所列。
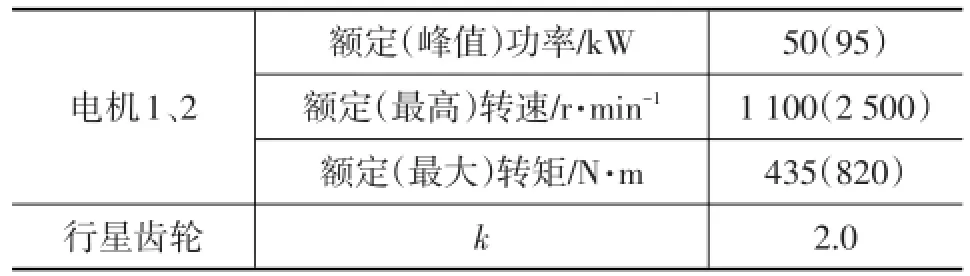
表2 驱动耦合系统选型匹配结果
4 车辆动力性仿真
为了验证匹配计算结果的合理性,根据所设计双电机耦合驱动系统的结构形式,基于AVL-Cruise仿真平台搭建整车仿真模型,如图2所示。
在整车仿真模型搭建过程中需要输入驱动电机的性能参数。根据电机基本参数选取某公司一款性能相近的车用永磁同步电机作为参考样机来进行仿真研究,该电机的相关参数如表3所列。

表3 参考电机的基本性能参数
该电机的试验测试性能曲线如图3所示。
由表3及图3可知,该电机与前面匹配计算的电机性能基本一致,可作为电机模型进行仿真计算。由此,根据目标车辆设计的动力性指标进行仿真分析验证,主要验证的参数有最高车速、最大爬坡度以及0-50 km∕h的加速时间。仿真结果如图4~图7所示。
由图4可知,所选电机最高转速满足车辆最高车速的要求。由图5可知,驱动系统满足车辆最高车速下的动力需求。图6显示车辆在满载状态下最大爬坡度超过20%,满足设计要求。由图7可以看出,车辆满载下的0-50 km∕h加速时间较短,车辆具有良好的起步加速性能。由以上仿真结果可知,双电机耦合驱动系统的选型匹配结果满足车辆的动力性要求。
5 车辆经济性仿真
5.1双电机耦合系统控制策略
车用电机性能的优劣对车辆的经济性有至关重要的影响。所选电机为永磁同步电机,其具有结构简单、运行效率高的特点。图8所示为该电机系统(电机及其控制器系统)在电动状态下的效率MAP图。
从图8中可以看出,该电机系统的高效区(>90%)集中于中高速工况下,在低速区以及低负荷状态下系统的工作效率低。由于电机的负荷及转速直接受制于车辆的行驶工况,对于一般的单电机驱动系统无法避免这些低效区间。由于采用行星齿轮耦合机构,该双电机驱动系统不仅具有传动平稳、传动效率高的特点,而且拥有灵活多变的工作模式,一方面可以使耦合系统发挥极大的转矩性能,满足车辆的动力性要求,另一方面则可以根据电机的效率特性来制定相应的控制策略,从而提高驱动系统的工作效率,改善车辆的经济性。
基于双电机耦合结构的特点,制定两种不同的控制策略。
a.策略1:基于单一模式的平均转矩分配控制策略。车辆在行驶时,双电机机构始终以工作模式2来完成耦合驱动,其中电机1和电机2以相同转速和转矩输出动力,此时双电机系统可类比为固定速比的单个大功率电机驱动结构。
b.策略2:基于多种模式的转矩优化分配控制策略。车辆起步时,离合器1接合,离合器2分离,驱动系统以工作模式1完成驱动。当电机2的转速达到一定数值后,离合器1分离,离合器2接合,两个电机以相同转速工作,驱动系统切换至工作模式2。其中,两个电机的转矩分配策略如图9所示。
5.2不同控制策略下的经济性仿真
针对上述两种控制策略,基于中国典型城市公交工况和日本城市工况对整车经济型进行仿真计算,得出相应能耗。两种城市工况如图10和图11所示。
基于AVL-Cruise仿真平台,完成车辆在不同载荷、不同工况以及不同控制策略下的经济性仿真。仿真计算中默认关闭车辆空调附件等耗能部件,而且耦合系统中电机均没有进行回馈制动。仿真结果见表4。
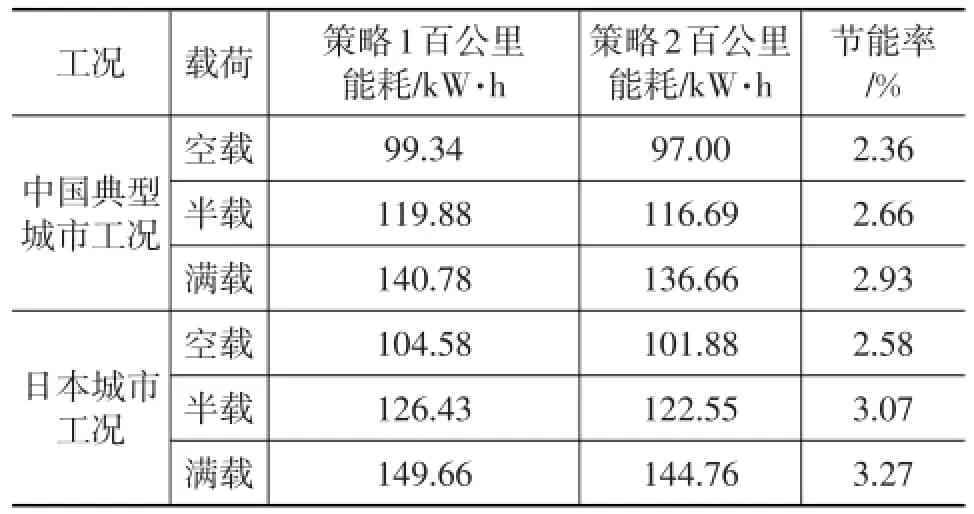
表4 两种控制策略下车辆的百公里能耗
由表4可知,基于多种模式的转矩优化分配控制策略相对平均转矩分配控制策略可使车辆的能耗得到有效改善,其节能率达到3%。由此可以看出,双电机耦合驱动系统可根据自身结构特点,制定合理的控制策略来改善车辆的经济性。同时也表明,双电机驱动比单电机驱动方式在经济性上更具优势。
6 结束语
a.提出双电机耦合驱动系统的参数匹配计算方法,并基于某款12 m城市公交客车的原车参数完成系统的参数匹配选型,最终选取两款峰值功率为95 kW的驱动电机。
b.基于AVL-Cruise软件搭建系统的仿真模型,对整车的动力性进行仿真验证,仿真结果表明,双电机驱动系统参数匹配合理,车辆具有良好的动力性能。
c.针对双电机驱动系统特点提出两种控制策略,并对车辆在不同城市工况下的能耗进行仿真对比,结果表明拥有多种工作模式的双电机耦合驱动系统可有效改善车辆的经济性,其节能率达到3%。
参考文献
1任保宽,任秀苹,李晓霞.国内新能源公交车发展状况及问题探析.交通节能与环保,2013,04:28~32.
2时洪功.我国新能源客车产业化发展路径.客车技术与研究,2011(5):1~4.
3Komori S,Kagiyama T,Utsugi M,et al.Two-dimensional resistivity structure of Unzen Volcano revealed by AMT and MT surveys.Earth,Planets and Space,2013,65(7):759~766.
4李川.双电机混合动力客车换挡无动力中断的研究:[学位论文].长春:吉林大学,2009.
5Zhang X,Li C T,Kum D,et al.Configuration Analysis of Power-Split Hybrid Vehicles With a Single Planetary Gear. IEEE Transactions on Vehicular Technology,2012,61(8):3544~3552.
6Abdul A,Shafqat M S,Qureshi M A,et al.Performance Analysis of Power Split Hybrid Electric Vehicles Using Autonomie.IEEE Student Conference on Research and Development,2011,144~147.
7Jian L,Xu G,Wu Y,et al.A Novel Power-train Using Coaxial Magnetic Gear For Power-split Hybrid Electric Vehicles. International Conference on Electrical Machines and Systems,2011.
8Wu X,Zhang C,Wang Z,et al.System matching and simulation of dual-motor drive coupling for electric vehicles.International Conference on Consumer Electronics,Communications and Networks,2011:2699~2702.
9周飞鲲.纯电动汽车动力系统参数匹配及整车控制策略研究:[学位论文].长春:吉林大学,2013.
(责任编辑晨曦)
修改稿收到日期为2015年12月1日。
中图分类号:U469.7
文献标识码:A
文章编号:1000-3703(2016)06-0028-04
*基金项目:上海市科委项目(14DZ1202800)。
Dual-motor Propulsion System Design Match and Simulation Research for Electric City Bus
Jiang Shengfei,Wang Zhe,Sun Chenle,Zhang Tong
(Clean Energy Automotive Engineering Center,Tongji University,Shanghai 201804)
【Abstract】In view of the propulsion system′s shortcomings on the current large electric city bus,a dual-motor propulsion structure is designed and matched.This paper takes a city electric bus as research object to match the parameters for dual-motor propulsion system.Besides,the vehicle′s simulation model and the torque distribution control strategy of propulsion system are built in software platform AVL-Cruise,to simulate and analyze the vehicle′s dynamic property as well as the fuel economy.The results show that the parameter matching of the dual-motor propulsion system are rational,which enables the vehicle with good dynamic property,and it can improve vehicle′s fuel economy by the distribution of torque optimization control strategy.
Key words:Electric bus,Dual-motor propulsion system,Dynamic property,Economy
