聚吡咯驱动器迟滞非线性特性探究*
2016-07-15尚星良王湘江
尚星良,王湘江
(南华大学 机械工程学院,湖南 衡阳 421001)
聚吡咯驱动器迟滞非线性特性探究*
尚星良,王湘江
(南华大学 机械工程学院,湖南 衡阳 421001)
摘要:在仿生学领域中,聚吡咯驱动器因具有结构简单,适应性强,抗电磁干扰等优点得到广泛应用; 通过对驱动器的传递函数进行建模分析,得出其存在迟滞非线性特性,且该特性会造成驱动器跟踪定位精度低,可控性差,所以采用PI模型对驱动器进行迟滞建模,并研究其迟滞特性. 首先,对传递函数模型中得到的输出位移进行误差分析,得知驱动器存在迟滞非线性特性,将系统模型分为纯迟滞模型及传递函数模型两部分; 其次,利用PI模型的算法对不同输入频率信号下的系统分别构建迟滞模型,并通过分析基于迟滞模型的系统模型的输出结果,得出驱动器存在迟滞非线性特性,且该特性与输入信号频率无关; 最后通过比较试验测量输出数据与仿真结果,验证结论的有效性.
关键词:聚吡咯; 迟滞性; 传递函数; 算子; 密度函数
0引言
随着微纳米技术的发展,人们对微观世界开始越来越关注,定位加工更精确的微型驱动器成为研究热点. 导电聚合物因具有驱动电压低、能耗低、生物相容性、较强的环境适应能力等优点开始被更多地用于制备驱动器,而聚吡咯作为一种新型的导电高分子材料,以其较好的稳定性和导电性以及制作方法简单等特性,倍受人们的关注[1]. 而对聚吡咯驱动器的实验测量结果分析发现其存在定位偏差,可控性较差等缺点[2],而其他智能材料如超迟滞伸缩材料,压电陶瓷等存在的迟滞非线性特性同样会导致此类缺陷,故推测聚吡咯驱动器可能存在迟滞非线性特性[3]. 为了减少迟滞非线性的不利影响,更好地应用这些智能材料,很多科研人员对此做了大量研究. 1935年PREISACH等人建立了比较完善的迟滞模型——PREISACH 模型; 1970年,俄国数学家Krasnoselskii在Preisach模型的基础上提出了计算过程更为简单,且更精确地描述迟滞现象的Prandtl-Ishlinskii(PI)模型[4-7]. Prandtl-Ishlinskii(PI)模型计算过程更为简单,便于对驱动器建立控制补偿[8-9],故本文采用PI模型对聚吡咯驱动器进行迟滞分析.
本文针对聚吡咯型导电聚合物驱动器进行动力学建模,并通过实验研究发现其存在一定的迟滞非线性特性. 利用PI算子对驱动器建立静态的迟滞模型,对不同频率输入信号经迟滞模型后得到的输出结果进行分析,且对实验测量输出与系统模型输出进行比较分析.
1系统的动力学模型建立
1.1聚吡咯驱动器简介
聚吡咯驱动器是一种由3种物质组成的复合结构,见图1. 中间一层为PVDF,厚度为110 μm,是一种绝缘的具有渗透性的惰性聚合物,用来分离电化学分子,同时可以储存导电离子TFSI-. PVDF膜两表面上通过溅射镀上厚度范围为10~100 Å的金层,用于增强导电性,金层上利用电化学沉积方法得到两个聚吡咯层,为可动部分,厚度分别为30 μm. 通过发生氧化还原反应,上下聚吡咯层体积各发生改变,达到驱动的效果[10].
图1 聚吡咯驱动器结构示意图Fig.1 Polypyrrole actuator structure diagram
PPy层制备时掺杂有TFSI-离子,其阴离子电荷分散程度较高,易发生电离. 当对聚吡咯驱动器施加一定的电压时,正极的PPy/TFSI发生氧化反应,同时,负极的PPy/TFSI发生还原反应,根据Gandhi[11]建立的模型,发生氧化反应的正极PPy层吸收阴离子发生膨胀,而发生还原反应的负极PPy层释放阴离子发生收缩,致使驱动器表现为朝负极方向弯曲. 化学反应式为:
氧化反应:
还原反应:
此外,离子交换过程中的溶剂分子以及介于置换离子和聚合物共轭链之间的静电力也会对驱动器的体积变化造成影响.
1.2系统传递函数
图2 为实验设备实物图,实验所用的聚吡咯驱动器的尺寸均为10 mm×2 mm. 具体进行实验操作时,先用浓度为0.5 mol/L的有机溶剂Li+TFSI-/PC溶液将聚吡咯驱动器浸泡30 min左右后,用铜夹固定,稳压电源与铜夹相连,对驱动器提供 1 V的稳定工作电压,由图2中所示的信号发生器对聚吡咯驱动器提供不同频率的幅值为1的正弦电压信号:U=sin(2πft+φ),此次实验采用线性递增的输入频率:F=0.1 Hz, 0.2 Hz, 0.3 Hz, 0.4 Hz,呈正弦函数变化的输入电压施加在聚吡咯驱动器上,驱动器发生偏转,偏转位移可利用激光位移传感器进行测量,经数据采集卡输入电脑,采样间隔S设为0.005 s.
图2 驱动实验设备实物图Fig.2 Drive experimental equipment diagram
聚吡咯驱动器的传递函数G(s)=输出位移y/输入电压U,根据Chuc Huu Nguyen[12]的分析结果可知聚吡咯驱动器的连续传递函数G(s)的表达式为
(1)
利用Levy法进行拟合,得到系统传递函数参数[13]. 见表1 所示.
表1 辨识所得传递函数系数

图3 传递函数模型Fig.3 Transfer function model diagram
当传递函数为六阶时,个别零点出现在x轴正半轴,此时若对聚吡咯驱动器建立控制补偿,会出现不稳定情况,采用二阶传递函数,则会因为阶数低而不够精确,故选用四阶传递函数进行建模. 传递函数模型见图3.
对驱动器施加: U=sin(2*π*0.4*t-2.823 7)的输入信号时,通过传递函数模型后得到的输出为y1,实验测得的位移输出为y, 令位移误差e1=y1-y,此时的图像见图4. 由图4可知仅通过传递函数模型时,得到的理论输出与测量输出有较为明显的偏差,且位移误差也较大,为更精确表现误差程度,可将性能指标定义为

图4 经传递函数后的输出对比及误差Fig.4 Comparison and error of output through the transfer function
(2)
(3)
式中: RE为经传递函数模型后的理论输出位移与实验测得的位移值的相对误差, RSME为二者的均方根误差,通过式(2)和式(3)求得: RE1=0.120 4, RSME1=0.083 3.

图5 聚吡咯驱动器系统模型示意图Fig.5 Polypyrrole actuator system model diagram
鉴于仅通过传递函数模型后得到的输出与实际值存在较大误差,且存在非线性表现特征,故认为聚吡咯驱动器存在非线性的迟滞特性,此时对驱动器进行迟滞建模,新的系统模型由纯迟滞模型和传递函数模型组成,见图5 所示. 因PI算法可以较精确地描述迟滞现象,且计算参数较少,易于实现,故本文选用PI模型算法对聚吡咯驱动器建立迟滞模型.
2迟滞模型的建立
2.1PI模型的算法介绍
PI迟滞模型包括两种算子,截止算子Er[v](t),启动算子Fr[v](t),且他们之间存在关系
(4)
式中: r为设定的阈值,频率无关的迟滞模型的输出用u表示,其表达式为
(5)
式中: p(r)为对应的密度函数值,由截止算子Er[v](t)、启动算子Fr[v](t)之间的关系式(4)及迟滞模型输出表达式(5)可得
(6)
(7)

(8)
式中: X表示由密度函数p(ri)组成的列向量,B为对应时间点ti的与传递函数无关的经调整后的输出值(u1)i组成的列向量,w为系数矩阵.
2.2聚吡咯驱动器迟滞特性探究
在驱动器上施加U=sin(2*π*0.1*t-2.854 5)的正弦电压信号时,测得实际的输入数据U, 当驱动器为线性,放大系数为1,则U为理想输出. 调整后得到的与传递函数无关的可用于纯迟滞分析的新输出为y3, 即实际输出. 关于时间t的输入/输出图像见图6,输入-输出迟滞环图像见图7 所示. 由图7 可知,聚吡咯驱动器存在迟滞特性.
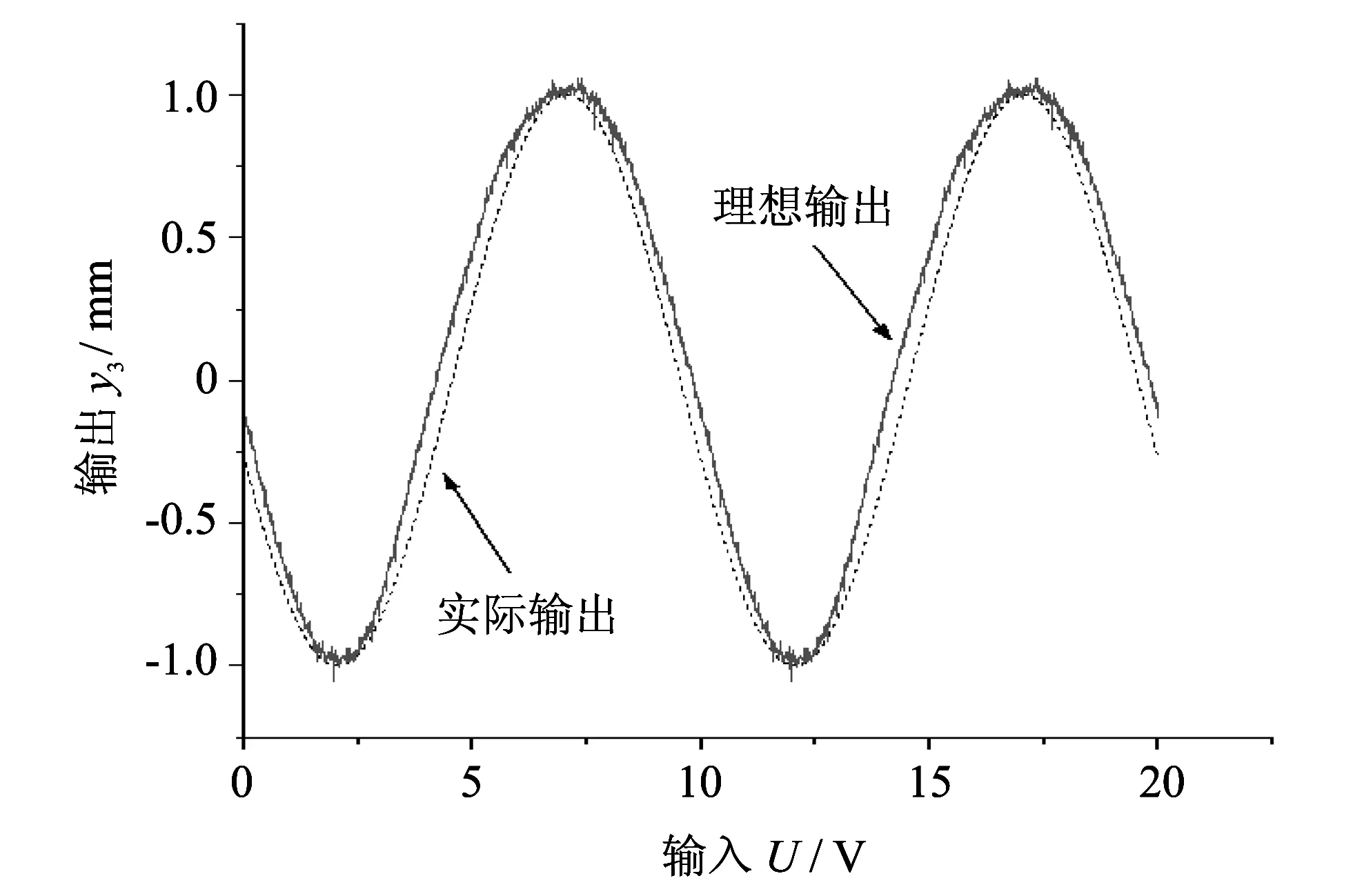
图6 F=0.1 Hz调整后的输入/输出图像Fig.6 F=0.1 Hz input/output adjusted image

图7 F=0.1 Hz调整后的输入/输出迟滞图像Fig.7 F=0.1 Hz input-output adjusted hysteresis image
当F=0.1 Hz,S=0.005 s时,参考式(8)得出对应的离散密度函数值p(ri)见表2. 将得到的密度函数值依次带入迟滞模型,得到的图像见图8,此时输出记为Y. 同理,当K=10时,F=0.1 Hz, 0.2 Hz, 0.3 Hz, 0.4 Hz时,F=0.1 Hz得出迟滞图像见图9.

表2 密度函数离散值
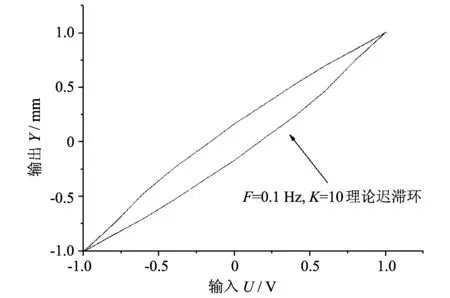
图8 K=10输入-理论输出迟滞图像Fig.8 K=10 input-theory output hysteresis image
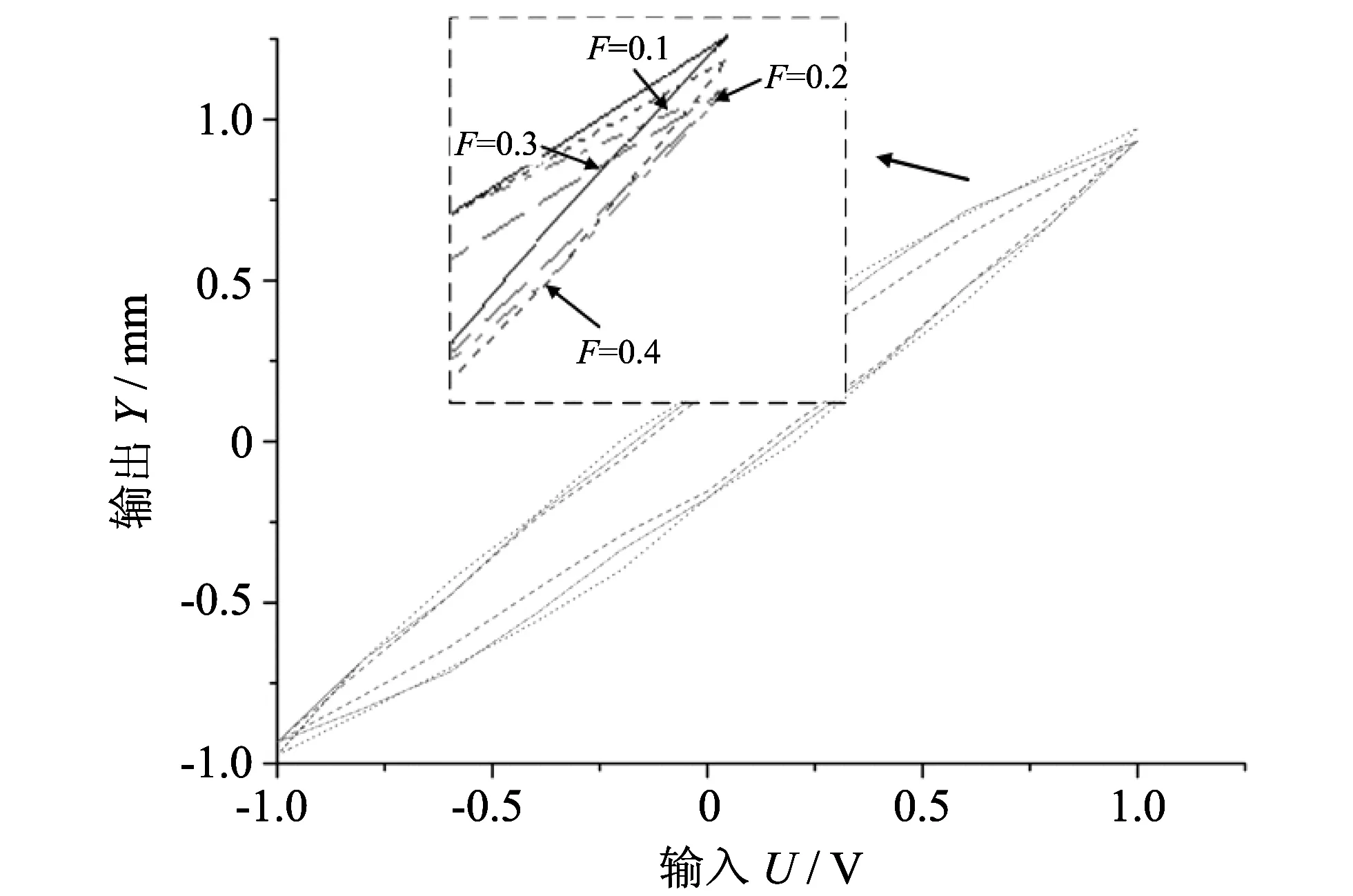
图9 不同频率时的输入-输出迟滞图像Fig.9 Input-output hysteresis images under different frequencies
由图9 可知,当输入电压的频率F成线性增加时,迟滞图像并没有太大改变,基本保持一致,则可认为聚吡咯驱动器具有迟滞非线性特性,且该特性与输入电压的频率无关. 根据图9所示,并考虑数据采集点的密集程度会影响描述驱动器实际驱动情况的准确度,认为聚吡咯驱动器的通用迟滞模型为F=0.1Hz对应的模型,其迟滞图像见图8所示.
3验证
由于非线性迟滞特性分析是建立在与传递函数无关的基础上,我们可以得到整个聚吡咯驱动器系统的模型(见图5),又当输入信号频率F=0.1Hz时的迟滞图像具有代表性(见图9),故选定其迟滞模型与四阶的传递函数模型串联组成系统模型,将输入信号u=sin(2*π*0.4*t-2.823 7)加在驱动器上,采集经过系统模型后的输出,记为y2, 位移误差为e2,对比及误差图见图10 所示. 实际输出y与经传递函数模型的输出y1及经系统模型后的输出y2对比图见图11 所示. 性能指标依旧取相对误差和均方根误差,分别命为RE2和RSME2. 得RE2=0.065 4, RSME2=0.043 7.
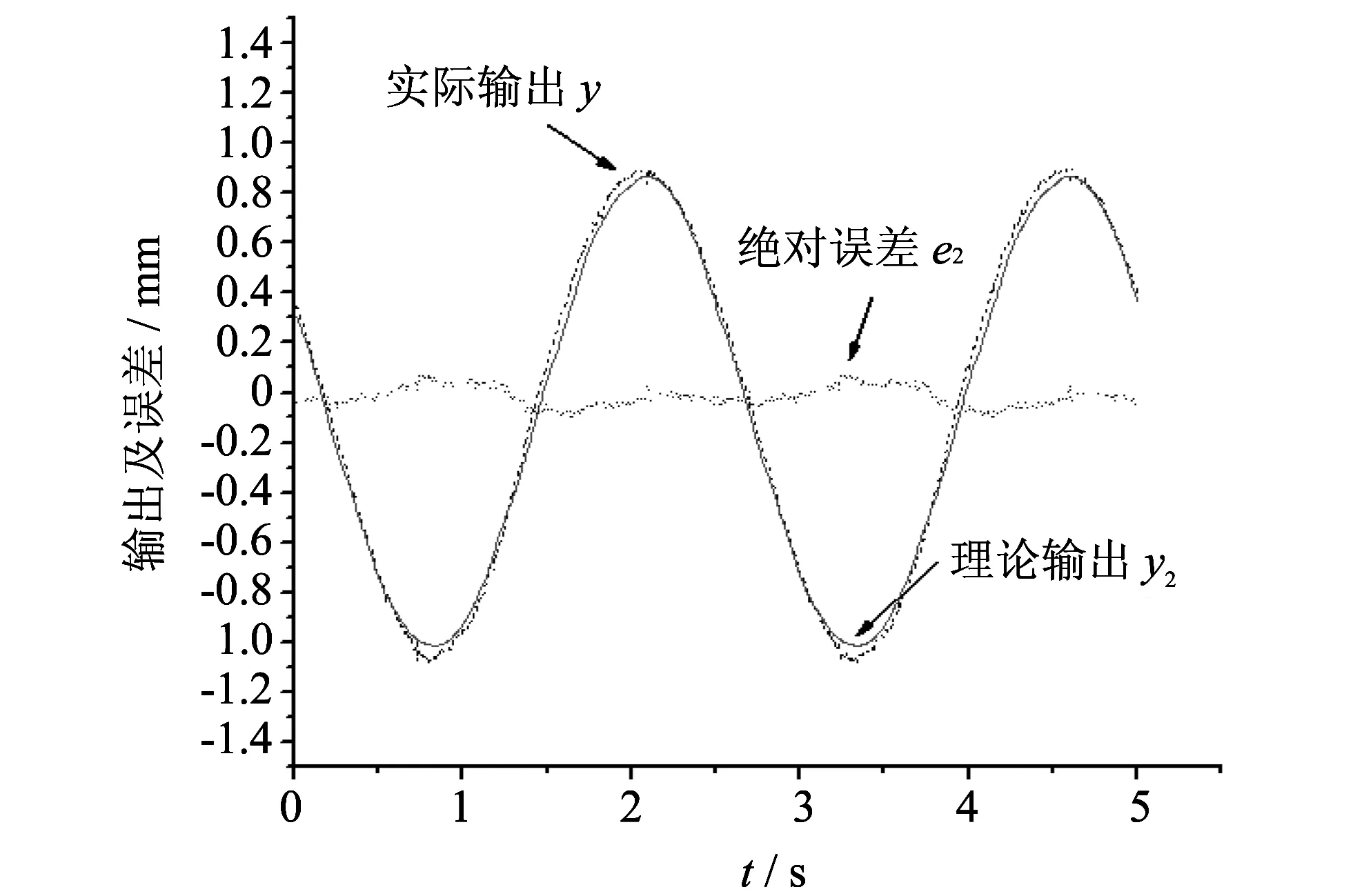
图10 经系统模型后的输出对比及误差Fig.10 Input-system output comparison and error

图11 输出对比图Fig.11 Output comparison image
观察图11 可知,经迟滞模型得到的输出位移值y2较传递函数输出y1与实验测量得到的真实输出y吻合程度更高,而通过比较两者的相对误差及均方根误差后可发现,通过系统模型后的输出相对误差减少45.68%,均方根误差减少47.54%,验证了驱动器系统模型的有效性,同时证明了非线性迟滞特性的存在假设是成立的,同时验证了迟滞非线性特性与输入频率无关这一结论.
4结论
由图8 可知聚吡咯驱动器存在迟滞非线性特性,且对聚吡咯驱动器施加不同频率输入信号时,其迟滞特性表现基本一致,故可知聚吡咯驱动器的迟滞特性与输入信号的频率无关. 从仿真验证的结果来看,经含迟滞模型的系统模型后得到输出明显比仅通过传递函数得到的输出更吻合,故利用PI模型的方法对聚吡咯驱动器建立的迟滞模型以及系统的传递函数模型是比较准确的,证明了所得结论的有效性.
参考文献:
[1]蔡本慧,曹雷,王肇君. 导电聚合物聚吡咯的制备,性质及应用[J]. 化工科技市场,2010,33(5): 11-16.
CaiBenhui,CaoLei,WangZhaojun.PreparationelectrochemicalpropertiesandapplicationofPolypyrrole[J].Chemicaltechnologymarket, 2010,33(5): 11-16. (inChinese)
[2]PhilippeMetza,GürselAlici,GeoffreyM.Spinks.Afiniteelementmodelforbendingbehaviorofconductingpolymer[J].ElectromechanicalactuatorsSensors&Actuators:A.Physical, 2005, 130: 1-11.
[3]贾振元,王福吉,张菊,等. 超磁致伸缩执行器磁滞非线性建模与控制[J]. 机械工程学报,2005,11(7): 131-135.
JiaZhenyuan,Wangfuji,ZhangJu,etal.Hysteresisnonlinearitymodelingandcontrolofgiantmagnetostrictiveactuator[J].ChinesejournalofMechanicalEngineering, 2005, 11(7): 131-135. (inChinese)
[4]MackiJW,NistriP,ZeccaP.Mathematicalmodelsforhysteresis[J].SIAMReview,1993, 35: 94-123.
[5]A1JanaidehMohammad,RakhejaSubhash,SuChun-Yi.AnanalyticalgeneralizedPrandtl-Ishlinskiimodelinversionforhysteresiscompensationinmicropositioningcontrol[J].IEEElASMETransactionsonMechrrtronics,2011,16(4): 734-744.
[6]WangXiangjiang,GurselAlici,TanXiaobo.Modelingandinversefeedforwardcontrolforconductingpolymeractuatorswithhysteresis[J].Smartmaterialsandstructures, 2014,23: 15-25.
[7]NguyenCH,AliciG,WallaceG.Anadvancedmathematicalmodelanditsexperimentalverificationfortri-layerconjugatedpolymeractuators[J].IEEE/ASMETrans.Mechatronicsdoi: 10. 1109/TMECH. 2013. 2280012 .
[8]WangQingqing,SuChunyi,ChenXinkai.RobustadaptivecontrolofaclassofnonlinearsystemswithPrandtl-Ishlinskiihysteresis[C]. 43rdIEEEConferenceonDecisionandControlDecember14-17, 2004.Atlantis, 2004: 213-218.
[9]王湘江,王兴松,毛燕. 基于普艾模型的迟滞系统自适应滑模控制[J]. 机械工程学报,2008,4(4): 171-179.
WangXiangjiang,WangXingsong,MaoYan.AdaptiveslidingmodelcontrolforhysteresissystembasedonPrandtl-Ishlinskiimodel[J].ChinesejournalofMechanicalEngineering, 2008, 4(4): 171-179. (inChinese)
[10]田素坤,王湘江,冯栋彦,等. 基于梁理论的导电聚合物驱动器等效模型及实验验证(英文)[J]. 科学技术与工程,2015,15(31): 49-56.
TianSukun,WangXiangjiang,FengDongyan,etal.Equivalentmodelingforconductingpolymeractuatorsbasedonbeantheoriesanditsexperimentalverification[J].ScienceTechnologyandEngineering,2015,15(31): 49-56. (inChinese)
[11]ChucHuuNguyen,GurselAlici,GordonG.Wallace.Modelingtrilayerconjugatedpolymeractuatorsfortheirsensorlesspositioncontrol[J].Sensor&Actuators:A.Physical,2012, 185: 2-91.
[12]ChucHuuNguyen,GurselAlici,GordonGallace,AnAdvancedMathematicalModelanditsExperimentalVerificationforTrilayerConjugatedPolymerActuators[J].IEEE/ASMETransactionsonMechatronics(impactFactor: 3. 43). 08/2014, 19(4): 1-10.
[13]方崇智,萧德云. 过程辨识[M]. 北京: 清华大学出版社,1988.
An Inquiry into Nonlinear Hysteresis Characteristics of PPy Actuator
SHANG Xingliang,WANG Xiangjiang
(School of Mechanical Engineering, University of South China, Hengyang 421001, China)
Abstract:In the field of bionics,PPy actuator has been widely used with simple structure, strong adaptability and resistance to electromagnetic interference, etc. Modeling the transfer function showed that PPy actuator exists hysteresis characteristics, which would lead low tracking accuracy and poor controllability. Hysteresis model was set up of PPy actuator based on Prandtl-Ishlinskii(PI) model thenthe hysteresis characteristics were analyzed. We found that PPy actuator has nonlinear hysteresis characteristics after did the error analysis of the output through the transfer function, then the model series was simplified astwo parts:transfer function model and pure hysteresis model. Hysteresis models under different input frequency signal were set for system . Through the analysis of the output results of the system based on hysteresis model, PPy actuator has nonlinear hysteresis characteristics ,which have nothing to do with the input signal frequency.Finally the effectiveness of the conclusion above has been verified by comparing experiment measurement of output data and the simulation results.
Key words:Polypyrrole; hysteresis characteristics; transfer function; operator; density function
文章编号:1671-7449(2016)04-0306-07
收稿日期:2016-01-12
基金项目:湖南省教育厅重点资助项目(13A081); 湖南省研究生科研创新资助项目(2015SCX18)
作者简介:尚星良(1990-),女,硕士生,主要从事微位移驱动器系统建模及控制的研究.
中图分类号:TH165
文献标识码:A
doi:10.3969/j.issn.1671-7449.2016.04.005
