KR16-2焊接机器人逆运动学求解与路径规划
2016-07-09韩兴国崔立秀陈海军刘晓刚殷国富
韩兴国,崔立秀,陈海军,刘晓刚,殷国富
(1.桂林航天工业学院,桂林 541004;2.四川大学 制造科学与工程学院,成都 610065)
KR16-2焊接机器人逆运动学求解与路径规划
韩兴国1,2,崔立秀1,陈海军2,刘晓刚1,殷国富2
(1.桂林航天工业学院,桂林 541004;2.四川大学制造科学与工程学院,成都 610065)
摘 要:随着焊接机器人应用日益广泛,焊接机器人的运动位姿精度和路径规划成为研究的热点,对机器人逆运动学求解成为解决这一问题的关键。针对如何提高焊接机器人逆运动学求解的精度和效率问题,以KR16-2焊接机器人为例,提出了一种图解法和代数法相结合进行求解的方法,利用图解法求解其前3个轴的关节角,利用代数法求解其后3个轴的关节角。最后,运用该方法对KR16-2机器人进行复杂路径规划仿真,仿真表明该方法是可行的、有效的。
关键词:焊接机器人;逆运动学;路径规划;图解法;代数法
0 引言
近年来,由于我国经济的高速发展,焊接机器人已广泛应用在汽车、摩托车、工程机械、铁路机车、能源等各行各业[1]。焊接机器人能代替工人在恶劣甚至有害的工作环境下执行特殊的工作任务,不仅降低了工人的劳动强度,改善了工作环境,而且可以提高劳动生产率和焊接质量。
焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。它是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域[2]。对焊接机器人而言,提高焊接质量和焊接效果对焊接机器人的位姿精度要求较高,机器人的位姿精度与其逆运动学求解精度密切相关,因此,焊接机器人逆运动学求解是非常有意义的一个研究领域,经常采用的方法有代数法[3]、几何法[4]和数值迭代法[5]等。近年来,不少学者也采用了一些智能算法[6~9]对机器人逆运动学进行求解,也取得了一定的效果。本文采用一种图解法和代数法相结合的方法对焊接机器人逆运动学进行求解,并运用该方法对复杂路径进行规划仿真。
1 KR16-2焊接机器人正运动学分析
KR16-2焊接机器人是6关节(6R)焊接机器人,其本体结构及各关节定义如图1所示。
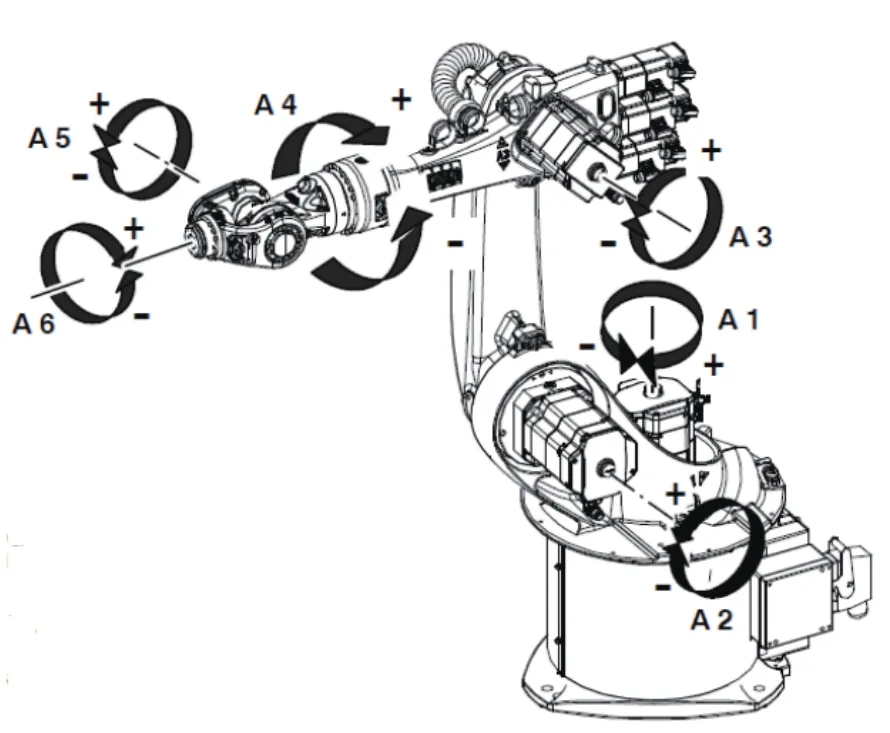
图1 KR 16-2焊接机器人各关节定义图
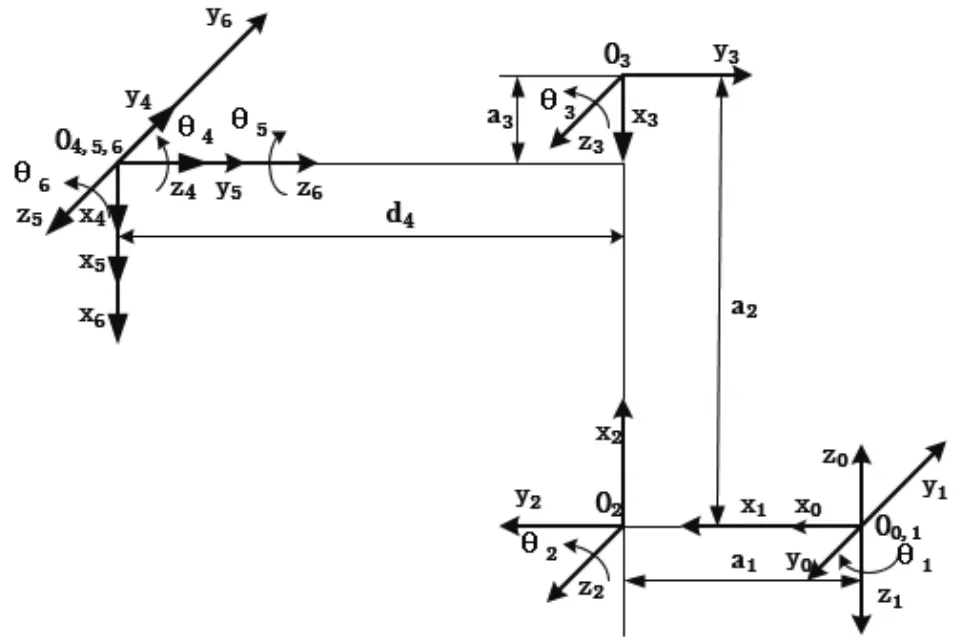
图2 KR16-2机器人D-H坐标系
6R机器人由一系列关节连接起来的连杆构成,进行正运动学分析,首先要为机器人的每一个连杆建立一个坐标系,并用齐次坐标变换描述这些坐标系间的相对位置和姿态[10]。针对KR16-2焊接机器人进行研究,根据机器人的结构参数,运用D-H法可以建立该机器人各个关节的坐标系,如图2所示,关节坐标系i相对于关节坐标系i-1的变换矩阵为:

KR16-2焊接机器人末端关节的坐标系相对于基础坐标系中的齐次变换公式为:

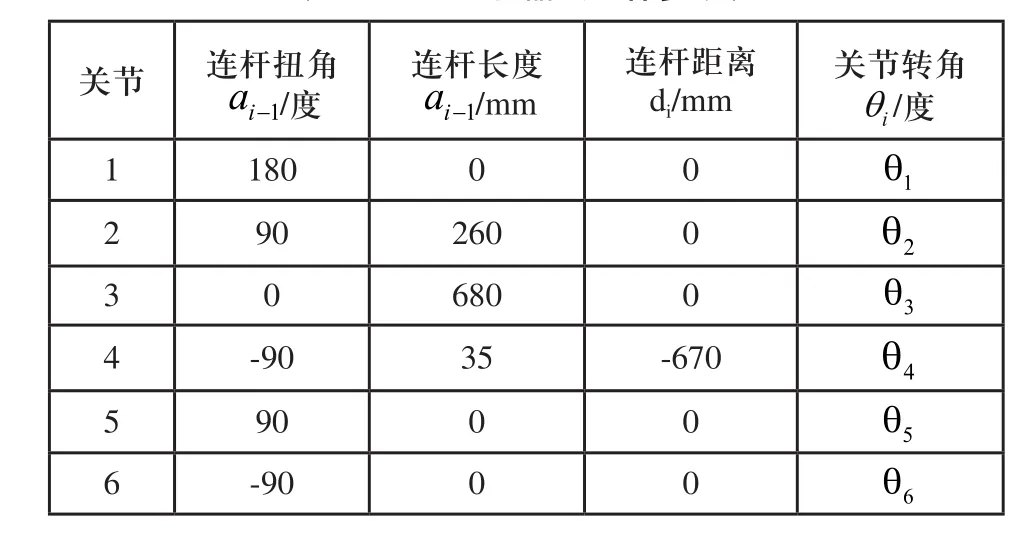
表1 KR16-2机器人连杆参数表
根据式(1)和式(2)可得:
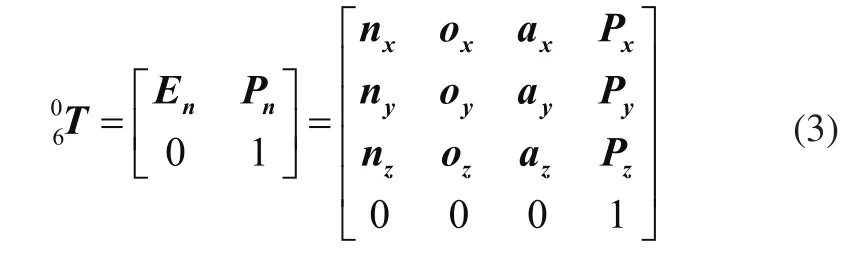
式中,En=[n o a]表示焊接机器人末端关节的姿态,n,o,a分别为法向向量、滑动向量和接近向量。Pn=[PxPyPz]T表示机器人末端关节在世界坐标系中的位置。
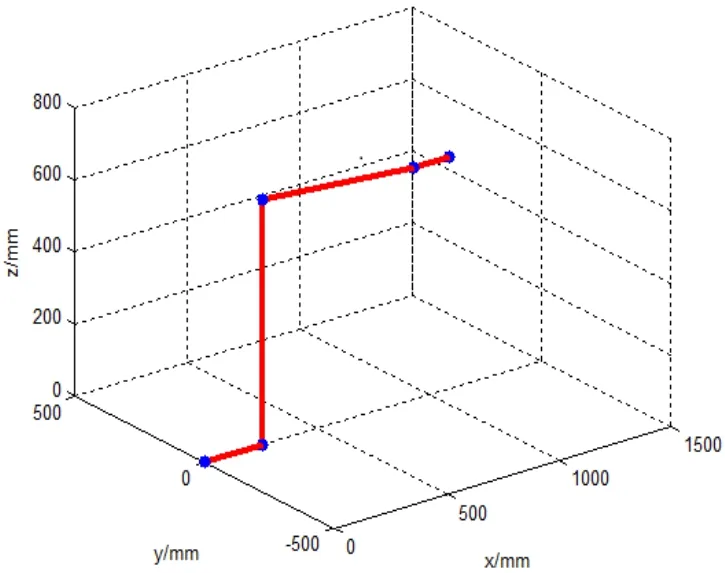
图3 KR16-2焊接机器人连杆结构示意图
机器人正运动学是根据机器人各轴的关节角求解机器人末端关节在世界坐标系中的位置和姿态。假设已知各轴的关节角,例如θ1=0、θ2= - π/2、θ3= π、θ4=0、θ5=0、θ6=0,根据KR16-2的D-H变量表以及各关节间的齐次变换矩阵,可依次求出各关节在世界坐标系中的位姿,利用MATLAB软件将所求的关节点在三维空间中描述,绘制出KR16-2焊接机器人连杆结构示意图,如图3所示。
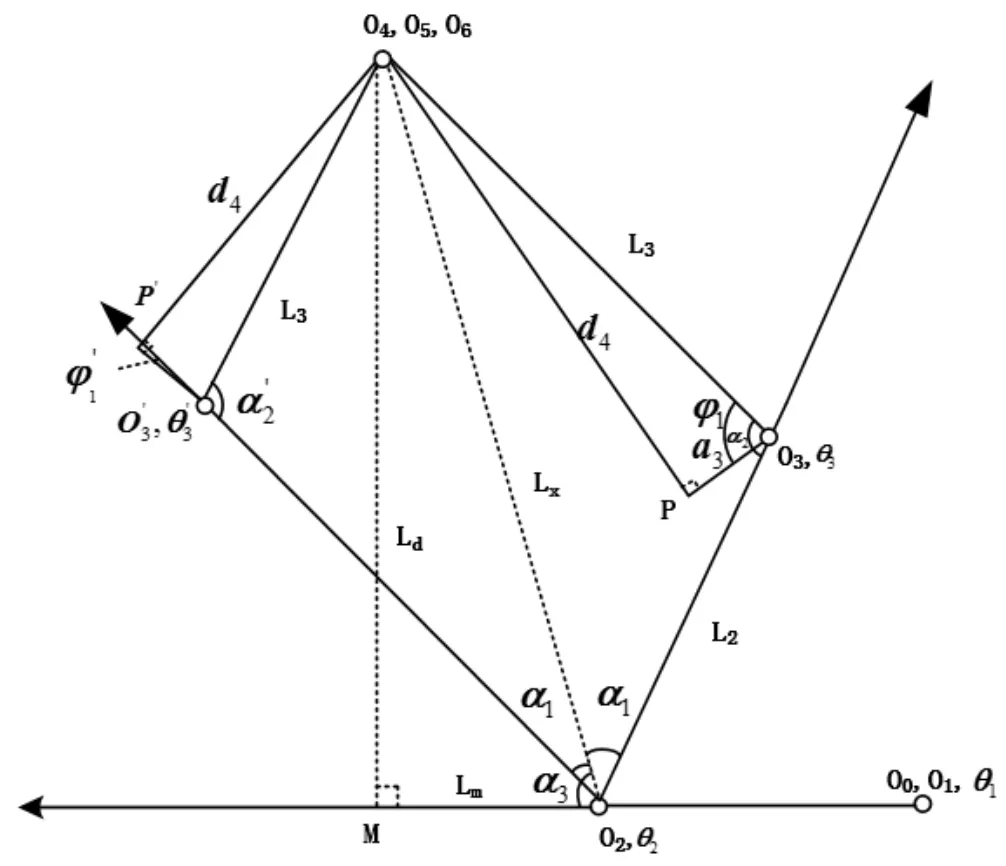
图4 KR16-2工业焊接机器人坐标系原点平面图
2 KR16-2焊接机器人逆运动学求解
逆运动学求解即已知机器人末端的位置和姿态,求解机器人对应于该位置和姿态的各轴关节角,以驱动各轴电机,使末端的位姿符合要求。与机器人正运动学相比,逆运动学求解较为复杂,而且具有多解。假设机器人末端焊接工具相对于末端关节的齐次变换矩阵为,机器人末端关节位姿为,由齐次坐标变换公式可得:

KR16-2焊接机器人的结构具有特殊性,其第2轴和第3轴平行,在图2所示的空间坐标系中,各轴的坐标系原点在1个平面内,4、5、6轴的坐标系原点交于一点,该点坐标是[PxPyPz],KR16-2工业焊接机器人坐标系原点平面图如图4所示。
关节角θ1根据末端关节的位置可得:

式中,atan2(y,x)是反正切函数,取值范围在-π到π之间。
1.企业思想政治工作不够重视。就目前来看,许多企业对于思想政治工作并不重视,将企业的经营发展与思想政治工作独立开来,片面地追求企业的发展而不顾及员工思想政治素质的提升,思想政治工作往往流于形式,落实程度较低。从长远发展来看,这种对思想政治工作的不重视势必会影响到企业的可持续发展。
式中,a1为第2轴的坐标原点相对于第1轴坐标原点沿x轴方向平移的距离。
在图4中,在三角形O2O3O4中可求得:
式中,L2是关节2和关节3之间的距离,L3是关节3和关节4(5、6)之间的距离,Lx是关节2和关节4(5、6)之间的距离。由三角函数公式可得:
式中,[Px2Py2Pz2]是关节2在世界坐标系中的坐标值。在图4中,在直角三角形O4O3P中,可得:

由图4中各角的几何关系及关节角的定义可得:

在直角三角形O2O3M中,可得:

式中:

由图4中各角的几何关系及关节角的定义可得:

根据空间几何知识,机器人末端关节到达某一位置,关节角θ2和θ3存在两组解,同理可求另外一组位姿的关节角θ'2和θ'3:
对式(1)进行转化可得:

因为θ1、θ2和θ3已知,由式(1)和式(4)可得式(18)等式右边,将公式(1)代入其式(18)等式左边可得:

式中,ci表示cosθi,si表示sinθi,sij=sin(θi+θj),cij=cos(θi+θj),i=1,2,…,6,j=1,2,…,6。若θ5≠0或π,由式(19)可得:
若θ5=0时,由式(19)可得:

若θ5=π时,由式(19)可以可得:

若θ5=0或π时,此时θ4和θ6有无数个解,此时令θ4=0,由式(23)和式(24)可以求得θ6。在式(20)至式(24)中,36T(m,n)代表矩阵36T第m行、第n列所对应的值。
3 KR16-2焊接机器人路径规划仿真
机器人路径规划是指机器人末端工具在空间中自初始点至目标点按预定要求的运动路径,亦可在有障碍物的情况下,寻找一条从起始点到达目标点的无碰撞路径。对KR16-2焊接机器人进行路径规划,分别以圆、椭圆和螺旋线为路径进行仿真,在运动仿真过程中暂不考虑机器人周围环境的障碍物情况,根据KR16-2焊接机器人正运动学方程和本文提出的逆运动学的求解方法,通过 MATLAB软件绘制出KR16-2焊接机器人的路径规划轨迹,图5、图6、图7分别表示KR16-2焊接机器人路径为圆、椭圆和螺旋线的轨迹仿真和机器人在某一时刻的位姿。
4 结论
本文运用D-H法对KR16-2焊接机器人建立了运动学模型,因为KR16-2焊接机器人属于6关节机器人,针对其逆运动学方程具有高维性、非线性和求解困难的特点,提出了一种基于图解法和代数法相结合的逆运动学求解方法,运用该方法对KR16-2焊接机器人进行路径规划,分别以圆、椭圆和螺旋线为路径进行了仿真,仿真结果表明,该方法正确、可行。
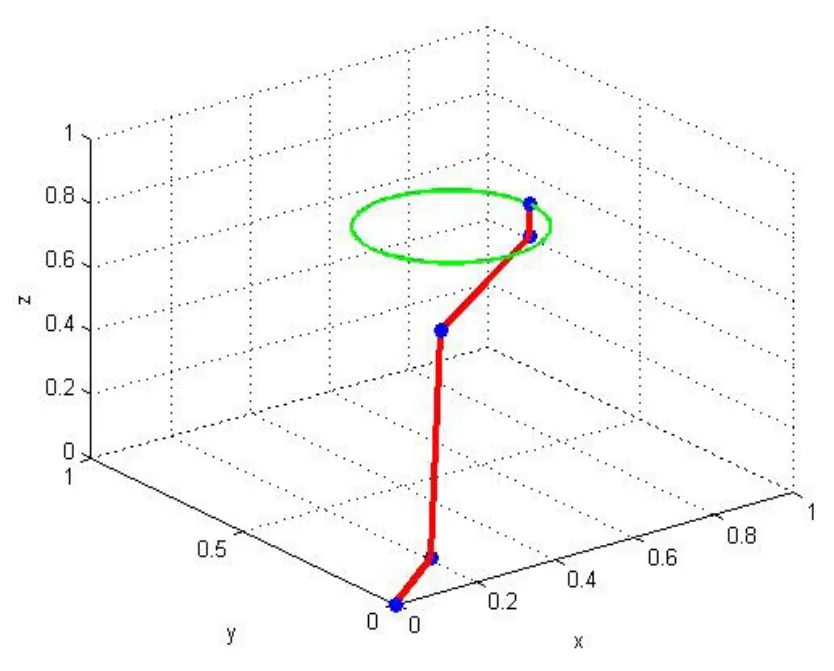
图5 圆轨迹路径规划
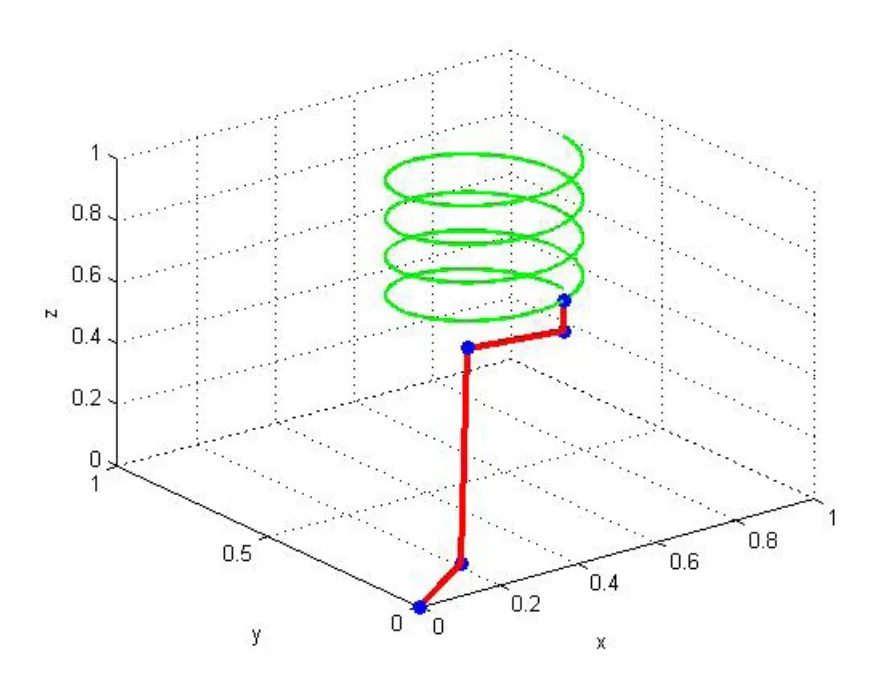
图6 椭圆轨迹路径规划
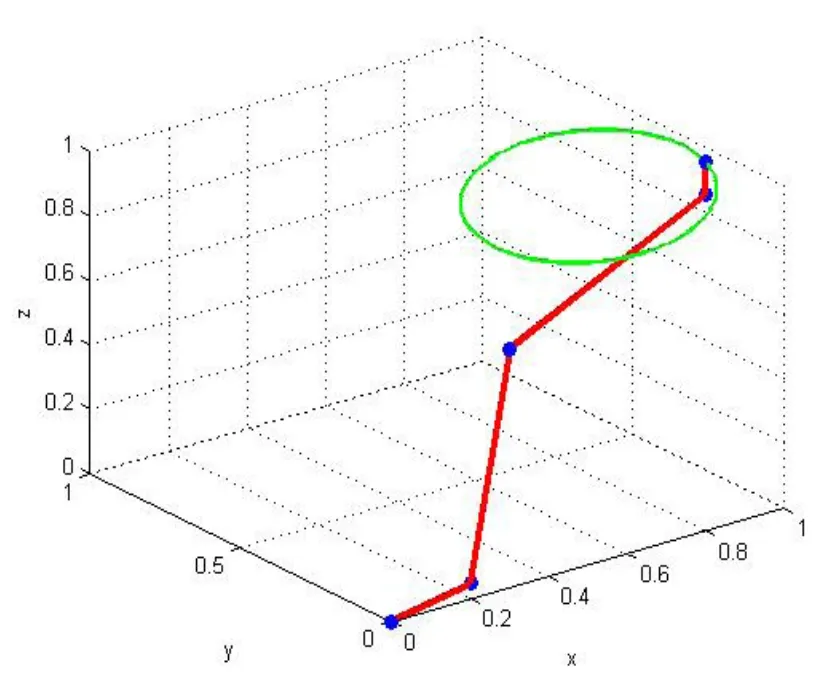
图7 螺旋线轨迹路径规划
参考文献:
[1] 张文明,云秀超,李晓旭,等.六自由度弧焊机器人运动及位姿控制[J].制造业自动化,2015(5):32-34.
[2] 周友行,张建勋,董银松.点焊机器人复杂轨迹逆运动学组合优化求解[J].焊接学报,2010,31(9):21-24.
[3] 陈伟华,招子安,吴少彬.六自由度机器人的圆弧轨迹规划算法研究[J].制造业自动化,2013(22):5-6.
[4] 吕世增,张大卫,刘海年.基于吴方法的6R机器人逆运动学旋量方程求解[J].机械工程学报,2010,46(17):35-41.
[5] Husty ML, Pfurner M, Schrocker HP.A new and efficient algorithm for the inverse kinematics of a general serial 6R manipulator[J]. Mechanism and Machine Theory,2007,42(1):66-81.
[6] Köker R. A genetic algorithm approach to a neural- network-based inverse kinematics solution of robotic manipulators based on error minimization[J].Information Sciences,2012,222(1):81-87.
[7] Chiddawar S S, Babu N R. Comparison of RBF and MLP neural networks to solve inverse kinematic problem for 6R serial robot by a fusion approach[J].Engineering Applications of Artificial Intelligence,2010,23(7):1083-1092.
[8] Zhang PY, Lü TS,Song LB. RBF networks-based inverse kinematics of 6R manipulator[J].International Journal of Advanced Manufacturing Technology,2005,26(1):144-147.
[9] A study of neural network based inverse kinematics solution for a three-joint robot[J].Robotics and Autonomous Systems,2004,49(3-4):227-234.
[10] 邵俊鹏,孙桂涛,高炳微,等.基于最小控制综合算法的液压机器人作动器控制[J].四川大学学报(工程科学版),2014,46 (6):178-184.
Solution of inverse kinematics and path planning for KR16-2 welding robot
HAN Xing-guo1,2, CUI Li-xiu1, CHEN Hai-jun2, LIU Xiao-gang1, YIN Guo-fu2
中图分类号:TP242
文献标识码:A
文章编号:1009-0134(2016)05-0048-04
收稿日期:2016-01-17
基金项目:国家科技重大专项课题资助项目(2013ZX04005-12);四川省科技支撑计划项目(2014GZ0117);广西高校机器人与焊接技术重点实验室培育基地项目(桂教科研[2014]6号)
作者简介:韩兴国(1981 -),男,山东莱州人,博士,研究方向为工业机器人和3D打印。
