航路规划的试飞评估技术初步研究
2016-07-06李太平袁大天中国飞行试验研究院陕西西安710089
李太平,陈 艳,袁大天(中国飞行试验研究院,陕西西安,710089)
航路规划的试飞评估技术初步研究
李太平,陈 艳,袁大天
(中国飞行试验研究院,陕西西安,710089)
摘要:本文简单介绍了航路规划及其相关技术,并以A*算法仿真为例对航路规划算法的一般步骤进行说明。针对航路规划的试飞进行了初步分析,并建立了以层次分析法为评估手段的指标评价体系,对试飞及评估技术有一定的辅助作用。
关键词:航路规划;A*算法;层次分析法
0 引言
飞行器航路规划是指根据已知的敌情和地形信息,从出发点到目标点,寻求一条满足飞行器飞行生存概率最大、完成任务最佳、综合指标最优的飞行路线。飞行航路规划的约束条件众多,例如,任务战术约束、威胁约束、飞行器性能约束等。目前航路规划技术发展迅速,规划算法多种多样,并且在理论上已经日趋成熟,但航路规划的相关试飞评估技术才刚刚起步。
1 航路规划技术简介
航路规划的关键技术包括环境模型的建立和规划算法的设计和选取。
对收集到的威胁区域,目标区域信息和自身约束条件等建立环境数学模型,即将实际求解最优航路的物理问题转化为多约束条件下,求极值的数学问题。按照环境模型约束来源的不同,将其划分为以下几类:
任务战术约束:任务完成时间,目标飞点,攻击方位角,初始航向;
威胁约束:雷达发现概率,导弹命中飞行器撞地概率,最小离地高度;
飞行器性能约束:最小(大)平飞航程,最大飞行高度,最大爬升角,最大航角,最大纵向曲率,最大过载。
规划算法的设计和选取,实际上是选取合适的算法将抽象出来的数学问题求解最优航路。
规划算法按照环境模型建立方式可以将航路规划分为基于图形(graph-based)和基于栅格(grid-based)两种建模方法。基于图形的方法首先根据一定规则将环境表示成由可飞航线和节点构成的网络图,然后根据特定的评价函数以及约束条件在图中进行搜索,得到最优航路。基于栅格法的航路规划,则是将可飞区域分解为一些简单的单元格,判断这些单元格是否连通,即路径是否连通,通过对这些单元格赋予一定代价值,根据代价值采用某种算法找到一条最优路径。
根据搜索航路算法不同,可以把规划算法分为遗传算法,Dijkstra法,蚁群算法,A*算法,人工势场法。
本文中以A*算法为例,简述航路规划算法过程。
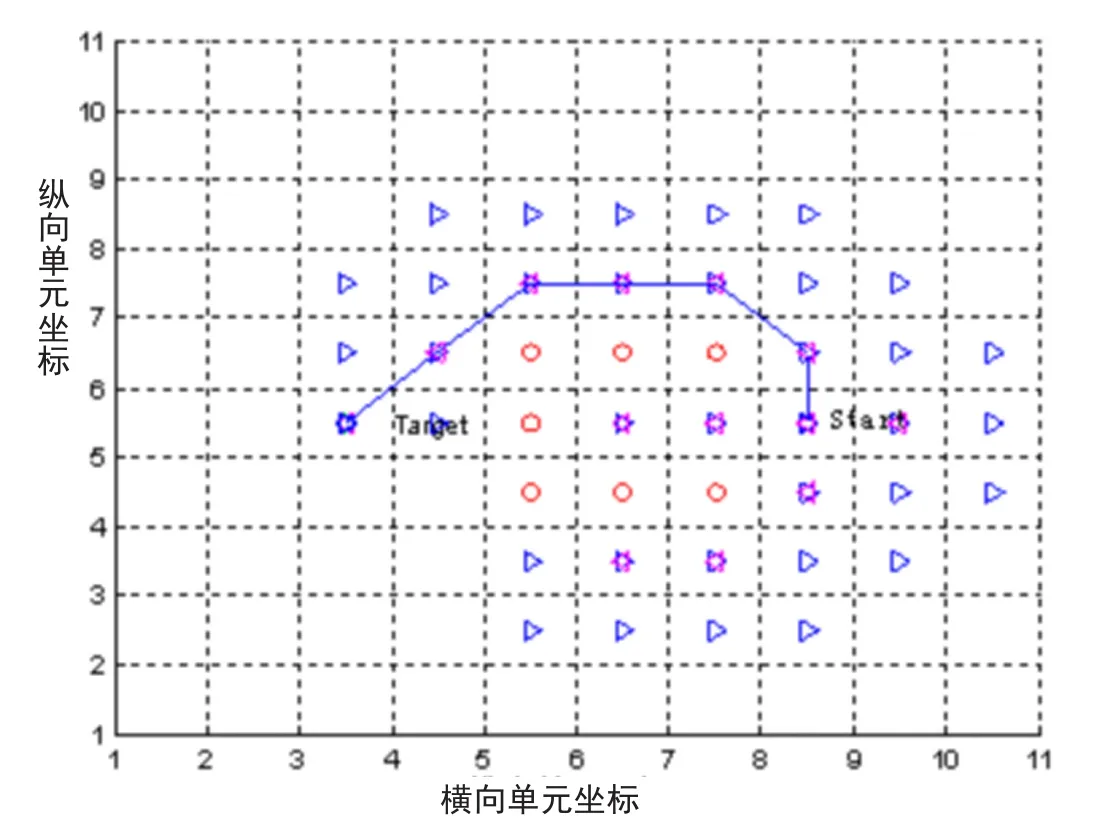
图1 简单栅格仿真效果
2 基于A*算法的航路规划仿真
A*算法是人工智能中的一种启发式搜索算法,它通过定义的代价函数来评估代价大小进而确定最优路径。代价函数为:

其中: n表示待扩展的节点。g(n)表示从起始点到当前点的代价;h( n)表示从当前点n到目标点的估计代价,称之为启发函数。f(n)表示从起始点经过节点n 到达目标点的最小代价路径的估计值。A*算法就是每次选择候选节点中f 值最小的节点进行扩展。
进行航路规划时首先对起点、终点、威胁源进行初始化,建立评价函数计算代价f,从起点向周围逐渐遍历寻找代价f最小的节点,遍历至终点时遍历结束。
图1中预设起点(8,6)和终点(3,5)以及障碍物列表为(5,4)、(5,5)、(5,6)、(6,4)、(6,6)、(7,4)、(7,6),在Matlab仿真平台下对上述简单栅格进行A*算法计算,遍历过程详见图1。
实际航路规划通常在数字地图上进行,需首先对地图进行栅格划分(起点、终点、威胁源均转化为栅格),将数字地图模型转化为基于栅格数学模型,图2为在数字地图上进行A*算法航路规划的结果。

图2 数字地图下航路规划结果
3 试飞及评估方法研究
航路规划视其用途侧重不同,采用不同的试飞方法。在检查航路规划试飞功能时,首先应进行场景设定。如航路规划侧重于低空突防任务,在进行航路规划试飞时,主要检查低空数字地图和地形回避功能,预先设定敌方防御系统场景(或通过电子侦察设备获得敌情信息),选择能够进行地形规避的地形,检查数字地图的地形信息辅助功能及航路规划功能。航路规划用于规避威胁环境,设定山地和高地等起伏地形,人为布设地面雷达等威胁源,模拟产生恶劣气象条件威胁,检查其在威胁环境下的航路规划功能。
设定场景后,应首先对其进行航路预演,预演应结合相应辅助软件检查航路是否考虑飞行器的物理限制,预演成功后进行试飞检查其规划功能。
航路规划功能评估可以采用层次分析法进行评估,评估时主要考虑航路的隐藏性、物理可飞性、战术任务要求、规划最优性/实时性四个指标。航路隐蔽性指降低被敌方预警雷达和截获雷达探测到的概率,提高生存能力;物理可飞性是指规划时必需考虑飞行器的机动性能限制,否则飞行器将不可能按生成的行迹进行飞行;战术任务需求是指特定任务的完成情况;规划最优性/实时性是指航路规划要适应战场环境的环境信息变化和任务的不确定性。
试飞后由飞行员对相关指标进行评分,由专家对指标进行评分计算出各指标权重,将飞行员评分按照权重进行加权计算即可得航路规划的评估结果。
4 结束语
本文简单介绍了航路规划的算法,并以A*算法仿真为例对航路规划算法的一般步骤进行说明,对航路规划的试飞评估进行了初步研究。现今航路规划算法相关理论研究技术发展迅速,但成熟应用于飞行器的较少,针对航路规划的试飞和评估技术才刚刚起步,仍需进行大量工作促进航路规划技术的推广应用。
参考文献
[1]熊丹君,蔡满意,刘宇坤,张冲。多约束条件下飞行器航路规划[J].弹箭与制导学报,2009,29(2):289-292
[2]胡木,李春涛。无人机在线航路规划技术研究及其工程实现[J]. 四川兵工学 报,2010,31(3):14-17
[3]穆中林,鲁艺,任波,张斌。基于改进A*算法的无人机航路规划方法研究[J]. 弹 箭与制导学报,2007,27(1):297-300
[4]彭汉国,马良,赵阳扬。编队作战中舰载预警直升机任务规划设计[J]. 四川兵工 学报,2014,35(5):14-17
Preliminary study on flight test evaluation technology of route planning
Li Taiping,Chen Yan,Yuan Datian
(Chinese Flight Test Establishment,Xi’an,China)
Abstract:This paper briefly introduces the route planning and its related technologies, and takes the A* algorithm simulation as an example to illustrate the general steps of the route planning algorithm. In order to make a preliminary analysis on the flight test of route planning, an index evaluation system based on analytic hierarchy process is established.
Keywords:route planning; A* algorithm; analytic hierarchy process
作者简介
李太平(1982-),男,湖北宜昌人,硕士生,主要从事综合航电系统试飞技术研究工作。
