基于HMM模型的驾驶员换道行为识别分析
2016-07-04张宇惠张凤登
张宇惠,张凤登
(上海理工大学 光电信息与计算机工程学院,上海 200093)
基于HMM模型的驾驶员换道行为识别分析
张宇惠,张凤登
(上海理工大学 光电信息与计算机工程学院,上海 200093)
摘要针对行车安全以汽车电子判断驾驶员驾驶方法是否会产生交通事故问题,文中采用隐马尔科夫模型的建立与应用,对驾驶员变换车道行为进行了分析,并利用向前-向后算法解决模型估算问题。通过应用Matlab工具箱进行模型参数集的训练,验证了该模型的有效性。
关键词变换车道;隐马尔科夫模型;Matlab
随着汽车电子的高速发展,对于行车安全的关注度大幅提高。通常情况下,驾驶员在处理危机时刻所做出的动作反应与危险程度有关,因此只有尽早获取驾驶员的行为信息,才能有效的避免悲剧的发生。当紧急情况发生时,驾驶员首先紧急松开驾驶踏板,再迅速移动到制动踏板,最后紧急踩下制动踏板,这一系列行为按时间顺序连接起来就构成了“紧急制动”行为。在本文中,通过CAN总线信息采集到驾驶员驾驶原始数据,比如汽车方向盘转角,方向盘转动速度,横摆角速度,汽车车速等,并利用隐马尔科夫模型对驾驶员的行为进行辨识,可完成对驾驶换道行为的辨识。
1隐马尔科夫模型
隐马尔科夫模型[1](HMM)是由马尔科夫模型演变而来的双重随机过程的模型即包括马尔科夫链以及一般随机过程。由于HMM并不能直接看出状态,其中观察到的事件和状态是不一致的,而是通过随机过程来判断,这区别于马尔科夫模型,因此被称为“隐马尔科夫模型”。HMM模型由两部分组成:马尔科夫链,其中初始概率分布为π,状态转移概率矩阵A,产生输出状态q1,q2,q3,…,qn;随机过程,由观察值概率分布 描述,产生的观察值序列为Q1,Q1,Q3,…,QT。HMM可简化描述为
λ=[π,A,B]
(1)
在HMM中,对于已给定的模型和给定的观察序列可用向前-向后算法有效计算出观察序列的概率,即P(Q|λ)[2];对于如果能找到一个状态转换序列则可用维特比算法;对于模型参数未知或者不确定的情形下,可利用Baum-Welch算法求得模型参数或者调整模型参数。
2驾驶员换道行为识别
2.1驾驶员换道行为HMM结构定义
文中将换道行为分为3种情形,即直线行驶、正常换道、紧急换道。因为实际采集中没有得到紧急换道的CAN总线数据,所以对于紧急换道行为暂不加考虑。驾驶行为[3]本身是一个连续过程,即后一时刻的状态只取决于前一时刻状态,因此采用自左向右的HMM模型结构[4],如图1所示,其中S1备状态,S2为动作状态,S3为复原状态,这3个为隐状态组成。
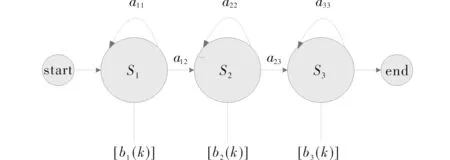
图1 换道行为的HMM结构
图2为CANoe软件捕获的驾驶员向左换道的CAN报文信号,从图中分别可看出3个状态的变化过程以及相应的车速,方向盘转角等变化。通过CAN总线的相应报文信号可重现驾驶员的行为,这对于HMM模型分析驾驶员的行为是极其重要的。
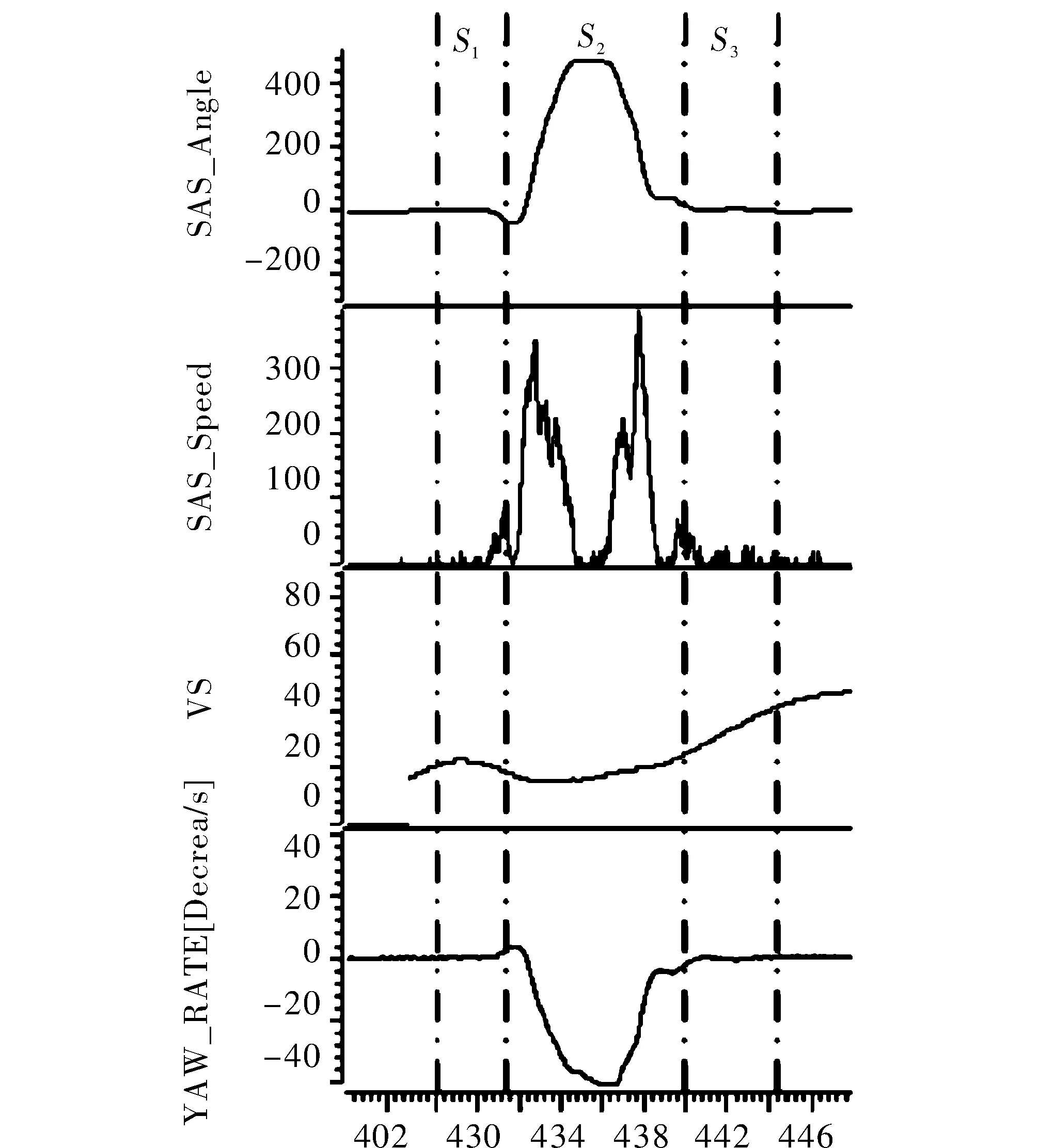
图2 驾驶员左换道行为的状态数据
2.2HMM模型参数集训练
在使用HMM模型进行驾驶员行为分析之前需要确定模型参数集,即与时间无关的矩阵A给定状态下观察序列的概率分布B,以及初始状态概率分布π。
为确定数据训练得到的模型具有普适性,采用多组观测序列样本制来进行[5-7],用固定时间间隔的方式提取各个状态输出观察序列的方式进行数据特征值的提取[8],设定时间间隔为1 s,车速约处于30 km/h。然后利用CANoe软件的Graphics窗口用标尺工具读取相应的值并记录作如表1所示。
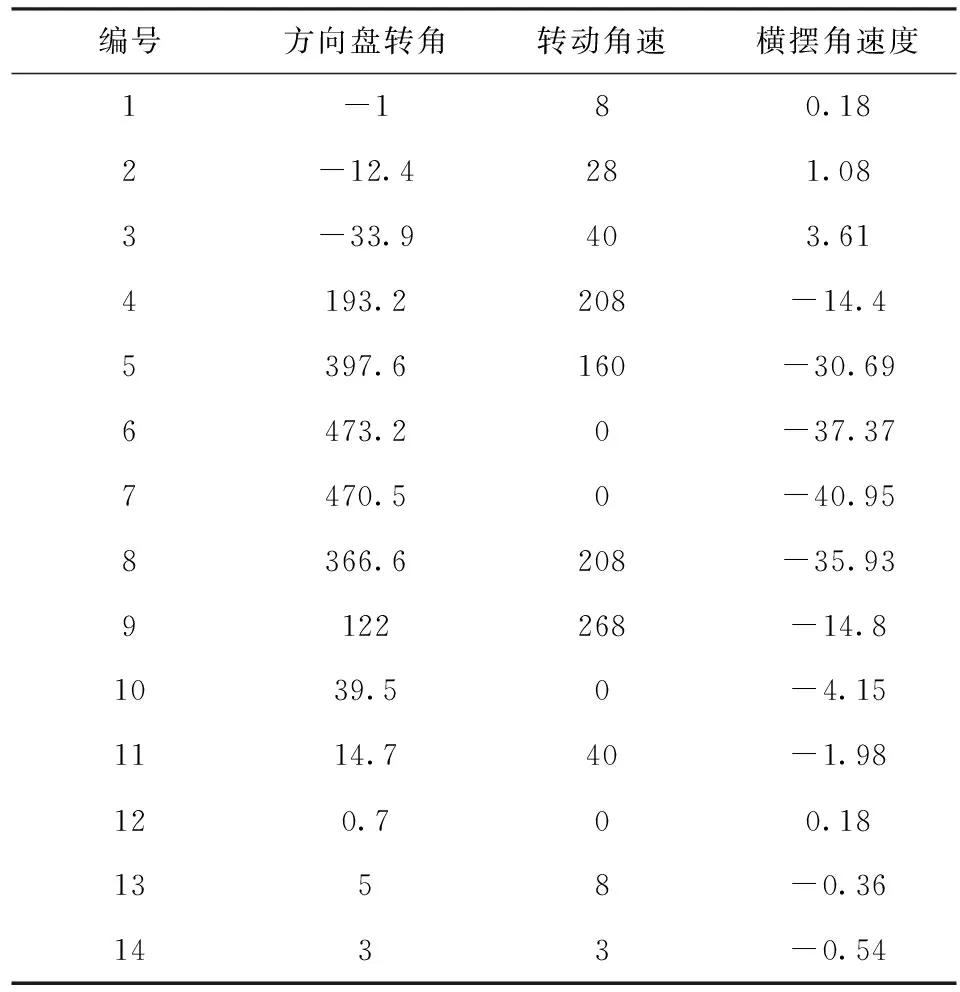
表1 正常换道行为对应的观察序列值
在得到训练模型的观察序列后,可利用HMM在Matlab中的工具箱进行该模型训练。将工具箱的压缩包解压到一个路径,再通过命令将其加载到MATLAB中去,利用工具箱中的程序,可分别训练出换道行为对应的HMM模型参数,结果如下

(2)

(3)

(4)
驾驶员车道保持与正常换道模型的最终训练曲线如图3所示。在训练过程中,纵坐标表示每次迭代计算得到的HMM模型的输出似然概率,在工具箱中采用log对数形式表示,输出负值。星线表示车道保持状态的训练结果;点划线表示正常换道的训练结果,两种模型分布经过12次和14次迭代计算达到收敛误差,表示模型训练成功。

图3 车道保持与正常换道HMM训练曲线
2.3换道行为的识别
上文通过Matlab工具箱对驾驶员的车道保持和正常换道行为对应的模型进行训练,得到HMM参数集。如图4所示,可继续利用HMM工具箱,计算当一组新的驾驶员行为数据作为模型的输入值时,对应的模型极大似然估计的输出值,即数据与模型之间的匹配度,值越大表示越匹配[9-10]。
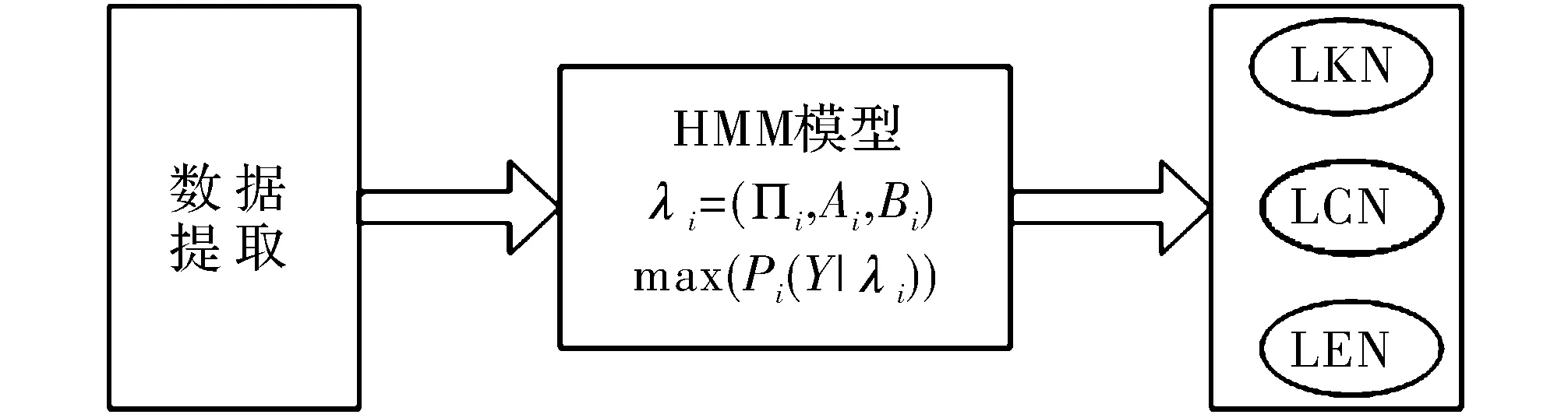
图4 驾驶员换道行为识别
由表2可知,对于车道保持的HMM模型,两组数据的输出似然概率值中,以车道保持的似然概率最大,则可认为驾驶员当前处于车道保持状态。同理,正常换道的HMM模型中,正常换道的测试数据似然概率值最大,既可保证驾驶员当前处于正常换道状态。

表2 测试数据输出似然概率值
3结束语
通过对HMM模型的理论进行研究建立了模型,并将其应用于驾驶员行为分析中。首先定义了驾驶员行为的HMM结构,然后对与驾驶员换道行为有关的CAN总线数据信号进行采集处理,应用Matlab工具箱进行模型参数集的训练,最后验证模型的有效性。文中没有采集到紧急换道的数据,并且未考虑到全部工况,比如没有考虑油门和制动,且文中为短期驾驶行为,没有考虑坡道起步、弯道制动等情况。在日后的研究中,需要完善辨识理论,实现对各种情况下对驾驶员换道行为的辨识,辅助驾驶,屏蔽错误操作,最终提高整体安全性能。
参考文献
[1]Rabiner L.A tutorial on hidden Markov models and selected applications in speech recognition[J].Proceedings of the IEEE,1989,77(2):257-286.
[2]Yang L,Xu Y,Chen C S.Human action learning via hidden Markov model[J].IEEE Transactions on Systems Man and Cybernetics,Part A:System and Humans,1997,27(1):34-44.
[3]王畅.基于隐形马尔科夫模型的驾驶员意图辨识方法研究[D].长春:吉林大学,2011.
[4]Kuge N, Yamamura T, Shimoyama O, et al. A driver behavior recognition method based on a driver model framework[R].SA,USA:SAE Technical Paper, 2000.
[5]Meng X,Lee K K,Xu Y. Human driving behavior recognition based on hidden Markov models[C].Berlin:IEEE International Conference on, Robotics and Biomimetics, 2006.
[6]Choi S J,Kim J H,Kwak D G,et al.Analysis and classification of driver behavior using in-vehicle can-bus information[C].SF,CA,USA:Biennial Workshop on DSP for In-Vehicle and Mobile Systems,2007.
[7]冯长建.HMM动态模式识别理论、方法以及在旋转机械故障诊断中的应用[D].杭州:浙江大学,2002.
[8]Habenicht S,Winner H,Bone S,et al.A maneuver-based lane change assistance system[C].NY,USA: IEEE Intelligent Vehicles Symposium (IV), 2011.
[9]Sathyanarayana A, Boyraz P, Hansen J H L. Driver behavior analysis and route recognition by hidden Markov models[C].CA,USA:IEEE International Conference on Vehicular Electronics and Safety, 2008.
[10]郁伟炜,吴卿.基于HMM的驾驶员疲劳识别在智能汽车空间的应用[J].计算机应用与软件,2011,28(10): 43-46.
Driver Lane-Changing Behavior Recognition Based on HMM Model Analysis
ZHANG Yuhui,ZHANG Fengdeng
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
AbstractIn view of the traffic safety in automotive electronics judgment driver method will cause traffic accidents. In this paper the establishment and application of hidden Markov model, has carried on the analysis to the driver’s lane changing behavior, and the forward backward algorithm to solve the model estimation problem. The parameters of the model is the training set by applying Matlab toolbox to verify the validity of the model.
Keywordslane change; hidden Markov model; Matlab
收稿日期:2015-10-31
基金项目:上海市自然科学基金资助项目(15ZR1429300)
作者简介:张宇惠(1990-),女,硕士研究生。研究方向:汽车电子与CAN总线。张凤登(1963-),男,教授。研究方向:汽车电子。
doi:10.16180/j.cnki.issn1007-7820.2016.06.010
中图分类号TP306.1
文献标识码A
文章编号1007-7820(2016)06-034-03